Linux下 QT串口与51单片机通信实例
51单片机的串口通信程序(C语言)
51单片机的串口通信程序(C语言) 51单片机的串口通信程序(C语言)在嵌入式系统中,串口通信是一种常见的数据传输方式,也是单片机与外部设备进行通信的重要手段之一。
本文将介绍使用C语言编写51单片机的串口通信程序。
1. 硬件准备在开始编写串口通信程序之前,需要准备好相应的硬件设备。
首先,我们需要一块51单片机开发板,内置了串口通信功能。
另外,我们还需要连接一个与单片机通信的外部设备,例如计算机或其他单片机。
2. 引入头文件在C语言中,我们需要引入相应的头文件来使用串口通信相关的函数。
在51单片机中,我们需要引入reg51.h头文件,以便使用单片机的寄存器操作相关函数。
同时,我们还需要引入头文件来定义串口通信的相关寄存器。
3. 配置串口参数在使用串口通信之前,我们需要配置串口的参数,例如波特率、数据位、停止位等。
这些参数的配置需要根据实际需要进行调整。
在51单片机中,我们可以通过写入相应的寄存器来配置串口参数。
4. 初始化串口在配置完串口参数之后,我们需要初始化串口,以便开始进行数据的发送和接收。
初始化串口的过程包括打开串口、设置中断等。
5. 数据发送在串口通信中,数据的发送通常分为两种方式:阻塞发送和非阻塞发送。
阻塞发送是指程序在发送完数据之后才会继续执行下面的代码,而非阻塞发送是指程序在发送数据的同时可以继续执行其他代码。
6. 数据接收数据的接收与数据的发送类似,同样有阻塞接收和非阻塞接收两种方式。
在接收数据时,需要不断地检测是否有数据到达,并及时进行处理。
7. 中断处理在串口通信中,中断是一种常见的处理方式。
通过使用中断,可以及时地响应串口数据的到达或者发送完成等事件,提高程序的处理效率。
8. 串口通信实例下面是一个简单的串口通信实例,用于在51单片机与计算机之间进行数据的传输。
```c#include <reg51.h>#include <stdio.h>#define BAUDRATE 9600#define FOSC 11059200void UART_init(){TMOD = 0x20; // 设置定时器1为模式2SCON = 0x50; // 设置串口为模式1,允许接收TH1 = 256 - FOSC / 12 / 32 / BAUDRATE; // 计算波特率定时器重载值TR1 = 1; // 启动定时器1EA = 1; // 允许中断ES = 1; // 允许串口中断}void UART_send_byte(unsigned char byte){SBUF = byte;while (!TI); // 等待发送完成TI = 0; // 清除发送完成标志位}unsigned char UART_receive_byte(){while (!RI); // 等待接收完成RI = 0; // 清除接收完成标志位return SBUF;}void UART_send_string(char *s){while (*s){UART_send_byte(*s);s++;}}void main(){UART_init();UART_send_string("Hello, World!"); while (1){unsigned char data = UART_receive_byte();// 对接收到的数据进行处理}}```总结:通过以上步骤,我们可以编写出简单的51单片机串口通信程序。
51单片机串口通信实例

51单片机串口通信实例一、原理简介51 单片机内部有一个全双工串行接口。
什么叫全双工串口呢?一般来说,只能接受或只能发送的称为单工串行;既可接收又可发送,但不能同时进行的称为半双工;能同时接收和发送的串行口称为全双工串行口。
串行通信是指数据一位一位地按顺序传送的通信方式,其突出优点是只需一根传输线,可大大降低硬件成本,适合远距离通信。
其缺点是传输速度较低。
与之前一样,首先我们来了解单片机串口相关的寄存器。
SBUF 寄存器:它是两个在物理上独立的接收、发送缓冲器,可同时发送、接收数据,可通过指令对SBUF 的读写来区别是对接收缓冲器的操作还是对发送缓冲器的操作。
从而控制外部两条独立的收发信号线RXD(P3.0)、TXD(P3.1),同时发送、接收数据,实现全双工。
串行口控制寄存器SCON(见表1) 。
表1 SCON寄存器表中各位(从左至右为从高位到低位)含义如下。
SM0 和SM1 :串行口工作方式控制位,其定义如表2 所示。
经验分享:学习单片机重要的是实践,所以开发板是很重要,给大家推荐些淘宝上信誉良好并且软硬件及小零件等、售前售后服务良好的皇冠级金钻店铺给大家,在硬件购买上少走弯路。
按住Ctrl键单击即可:慧净电子单片机(一皇冠)【天津商盟】天津锐志(电子)单片机经营部(两皇冠)金沙滩工作室(5钻)深圳育松电子元件,模块,传感器,批发部:淘宝最全最平价(5皇冠)志宏电子(4钻)表2 串行口工作方式控制位其中,fOSC 为单片机的时钟频率;波特率指串行口每秒钟发送(或接收)的位数。
SM2 :多机通信控制位。
该仅用于方式2 和方式3 的多机通信。
其中发送机SM2 = 1(需要程序控制设置)。
接收机的串行口工作于方式2 或3,SM2=1 时,只有当接收到第9 位数据(RB8)为1 时,才把接收到的前8 位数据送入SBUF,且置位RI 发出中断申请引发串行接收中断,否则会将接受到的数据放弃。
当SM2=0 时,就不管第位数据是0 还是1,都将数据送入SBUF,并置位RI 发出中断申请。
两个单片机间串口通讯

}
while(temp!=0xf0)
{
temp=P2;
temp=temp&0xf0;
}
send(num);
}
}
}
void main()
{
TMOD=0x20;//设置定时器1为工作方式2
TH1=0xfd;//装初值设置波特率
TL1=0xfd;
TR1=1;//打开定时器1
SM0=0;//8位异步收发
单片机间通讯
作者:冉纯雷
1.程序设计
发送程序:
#include<reg52.h>
#define uint unsigned int
#define uchar unsigned char
uchar num,temp;
void delay(uint z)//延时函数
{
uint x,y;
for(x=z;x>0;x--)
temp=P2;
temp=temp&0xf0;
if(temp!=0xf0)
{
temp=P2;
switch(temp)
{
case 0xee:num=16;
break;
case 0xde:num=12;
break;
case 0xbe:num=8;
break;
case 0x7e:num=4;
break;
}
{
delay(5);
temp=P2;
temp=temp&0xf0;
if(temp!=0xf0)
{
temp=P2;
switch(temp)
{
case 0xe7:num=13;
linux下的串口通信原理及编程实例

linux下的串⼝通信原理及编程实例linux下的串⼝通信原理及编程实例⼀、串⼝的基本原理1 串⼝通讯串⼝通讯(Serial Communication),是指外设和计算机间,通过数据信号线、地线等,按位进⾏传输数据的⼀种通讯⽅式。
串⼝是⼀种接⼝标准,它规定了接⼝的电⽓标准,没有规定接⼝插件电缆以及使⽤的协议。
2 串⼝通讯的数据格式 ⼀个字符⼀个字符地传输,每个字符⼀位⼀位地传输,并且传输⼀个字符时,总是以“起始位”开始,以“停⽌位”结束,字符之间没有固定的时间间隔要求。
每⼀个字符的前⾯都有⼀位起始位(低电平),字符本⾝由7位数据位组成,接着字符后⾯是⼀位校验位(检验位可以是奇校验、偶校验或⽆校验位),最后是⼀位或⼀位半或⼆位停⽌位,停⽌位后⾯是不定长的空闲位,停⽌位和空闲位都规定为⾼电平。
实际传输时每⼀位的信号宽度与波特率有关,波特率越⾼,宽度越⼩,在进⾏传输之前,双⽅⼀定要使⽤同⼀个波特率设置。
3 通讯⽅式单⼯模式(Simplex Communication)的数据传输是单向的。
通信双⽅中,⼀⽅固定为发送端,⼀⽅则固定为接收端。
信息只能沿⼀个⽅向传输,使⽤⼀根传输线。
半双⼯模式(Half Duplex)通信使⽤同⼀根传输线,既可以发送数据⼜可以接收数据,但不能同时进⾏发送和接收。
数据传输允许数据在两个⽅向上传输,但是,在任何时刻只能由其中的⼀⽅发送数据,另⼀⽅接收数据。
因此半双⼯模式既可以使⽤⼀条数据线,也可以使⽤两条数据线。
半双⼯通信中每端需有⼀个收发切换电⼦开关,通过切换来决定数据向哪个⽅向传输。
因为有切换,所以会产⽣时间延迟,信息传输效率低些。
全双⼯模式(Full Duplex)通信允许数据同时在两个⽅向上传输。
因此,全双⼯通信是两个单⼯通信⽅式的结合,它要求发送设备和接收设备都有独⽴的接收和发送能⼒。
在全双⼯模式中,每⼀端都有发送器和接收器,有两条传输线,信息传输效率⾼。
显然,在其它参数都⼀样的情况下,全双⼯⽐半双⼯传输速度要快,效率要⾼。
Linux串口通信编程
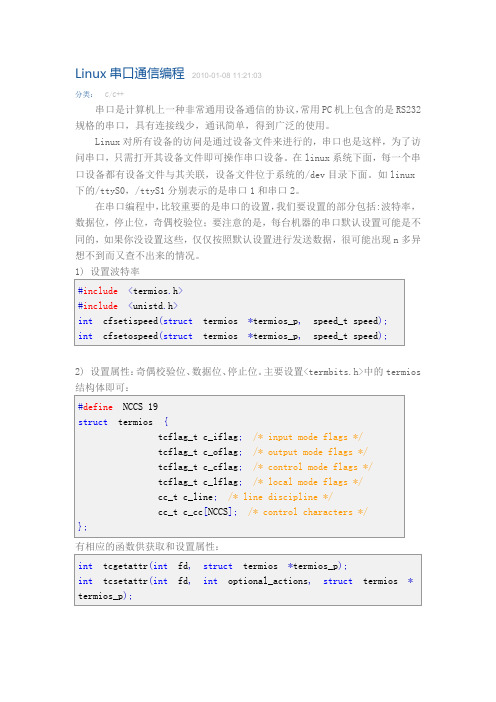
2) 设置属性:奇偶校验位、数据位、停止位。
主要设置<termbits.h>中的termios3) 打开、关闭和读写串口。
串口作为设备文件,可以直接用文件描述符来进行网上的一个例子:/*串口设备无论是在工控领域,还是在嵌入式设备领域,应用都非常广泛。
而串口编程也就显得必不可少。
偶然的一次机会,需要使用串口,而且操作系统还要求是Linux,因此,趁着这次机会,综合别人的代码,进行了一次整理和封装。
具体的封装格式为C代码,这样做是为了很好的移植性,使它可以在C和C++环境下,都可以编译和使用。
代码的头文件如下: *//////////////////////////////////////////////////////////////////// //////////////filename:stty.h#ifndef__STTY_H__#define__STTY_H__//包含头文件#include<stdio.h>#include<stdlib.h>#include<unistd.h>#include<sys/types.h>#include<sys/stat.h>#include<fcntl.h>#include<termios.h>#include<errno.h>#include<pthread.h>//// 串口设备信息结构typedef struct tty_info_t{int fd;// 串口设备IDpthread_mutex_t mt;// 线程同步互斥对象char name[24];// 串口设备名称,例:"/dev/ttyS0"struct termios ntm;// 新的串口设备选项struct termios otm;// 旧的串口设备选项}TTY_INFO;//// 串口操作函数TTY_INFO *readyTTY(int id);int setTTYSpeed(TTY_INFO *ptty,int speed);int setTTYParity(TTY_INFO *ptty,int databits,int parity,int st opbits);int cleanTTY(TTY_INFO *ptty);int sendnTTY(TTY_INFO *ptty,char*pbuf,int size);int recvnTTY(TTY_INFO *ptty,char*pbuf,int size);int lockTTY(TTY_INFO *ptty);int unlockTTY(TTY_INFO *ptty);#endif/*从头文件中的函数定义不难看出,函数的功能,使用过程如下:(1)打开串口设备,调用函数setTTYSpeed();(2)设置串口读写的波特率,调用函数setTTYSpeed();(3)设置串口的属性,包括停止位、校验位、数据位等,调用函数setTTYParity ();(4)向串口写入数据,调用函数sendnTTY();(5)从串口读出数据,调用函数recvnTTY();(6)操作完成后,需要调用函数cleanTTY()来释放申请的串口信息接口;其中,lockTTY()和unlockTTY()是为了能够在多线程中使用。
51单片机串口通信(相关例程)

51单片机串口通信(相关例程) 51单片机串口通信(相关例程)一、简介51单片机是一种常用的微控制器,它具有体积小、功耗低、易于编程等特点,被广泛应用于各种电子设备和嵌入式系统中。
串口通信是51单片机的常见应用之一,通过串口通信,可以使单片机与其他外部设备进行数据交互和通信。
本文将介绍51单片机串口通信的相关例程,并提供一些实用的编程代码。
二、串口通信基础知识1. 串口通信原理串口通信是通过串行数据传输的方式,在数据传输过程中,将信息分为一个个字节进行传输。
在51单片机中,常用的串口通信标准包括RS232、RS485等。
其中,RS232是一种常用的串口标准,具有常见的DB-9或DB-25连接器。
2. 串口通信参数在进行串口通信时,需要设置一些参数,如波特率、数据位、停止位和校验位等。
波特率表示在单位时间内传输的比特数,常见的波特率有9600、115200等。
数据位表示每个数据字节中的位数,一般为8位。
停止位表示停止数据传输的时间,常用的停止位有1位和2位。
校验位用于数据传输的错误检测和纠正。
三、串口通信例程介绍下面是几个常见的51单片机串口通信的例程,提供给读者参考和学习:1. 串口发送数据```C#include <reg51.h>void UART_Init(){TMOD = 0x20; // 设置计数器1为工作方式2(8位自动重装) TH1 = 0xFD; // 设置波特率为9600SCON = 0x50; // 设置串口工作方式1,允许串行接收TR1 = 1; // 启动计数器1}void UART_SendChar(unsigned char dat){SBUF = dat; // 发送数据while (!TI); // 等待发送完成TI = 0; // 清除发送完成标志}void main(){UART_Init(); // 初始化串口while (1){UART_SendChar('A'); // 发送字母A}}```2. 串口接收数据```C#include <reg51.h>void UART_Init(){TMOD = 0x20; // 设置计数器1为工作方式2(8位自动重装) TH1 = 0xFD; // 设置波特率为9600SCON = 0x50; // 设置串口工作方式1,允许串行接收TR1 = 1; // 启动计数器1}void UART_Recv(){unsigned char dat;if (RI) // 检测是否接收到数据{dat = SBUF; // 读取接收到的数据 RI = 0; // 清除接收中断标志// 处理接收到的数据}}void main(){UART_Init(); // 初始化串口EA = 1; // 允许中断ES = 1; // 允许串口中断while (1)// 主循环处理其他任务}}```3. 串口发送字符串```C#include <reg51.h>void UART_Init(){TMOD = 0x20; // 设置计数器1为工作方式2(8位自动重装) TH1 = 0xFD; // 设置波特率为9600SCON = 0x50; // 设置串口工作方式1,允许串行接收TR1 = 1; // 启动计数器1}void UART_SendString(unsigned char *str){while (*str != '\0')SBUF = *str; // 逐个发送字符while (!TI); // 等待发送完成TI = 0; // 清除发送完成标志str++; // 指针指向下一个字符}}void main(){UART_Init(); // 初始化串口while (1){UART_SendString("Hello, World!"); // 发送字符串}}```四、总结本文介绍了51单片机串口通信的基础知识和相关编程例程,包括串口发送数据、串口接收数据和串口发送字符串。
51单片机串口通信程序。。含详细例子
{ P3_4=0; P3_3=1;
} void RstPro()//编程器复位 {
pw.fpProOver();//直接编程结束 SendData();//通知上位机,表示编程器就绪,可以直接用此函数因为协议号(ComBuf[0])还没被修改,下同 }
void ReadSign()//读特征字 {
} void serial () interrupt 4 using 3 //串口接收中断函数 {
if (RI) { RI = 0 ; ch=SBUF; read_flag= 1 ; //就置位取数标志 }
} main()
{ init_serialcom(); //初始化串口 while ( 1 ) { if (read_flag) //如果取数标志已置位,就将读到的数从串口发出 { read_flag= 0 ; //取数标志清 0 send_char_com(ch); } }
while(RI == 0); RI = 0; c = SBUF; // 从缓冲区中把接收的字符放入 c 中 SBUF = c; // 要发送的字符放入缓冲区 while(TI == 0); TI = 0; } }
4.//////////////// /////////////////////////////////////////////////////////
SendData(); } else break;//等待回应失败 } pw.fpProOver();//操作结束设置为运行状态 ComBuf[0]=0;//通知上位机编程器进入就绪状态 SendData(); }
void Lock()//写锁定位
{
pw.fpLock();
SendData();
51单片机与串口通信代码

51单片机与串口通信代码串口调试1. 发送:向总线上发命令2. 接收:从总线接收命令,并分析是地址还是数据。
3. 定时发送:从内存中取数并向主机发送.经过调试,以上功能基本实现,目前可以通过上位机对单片机进行实时控制。
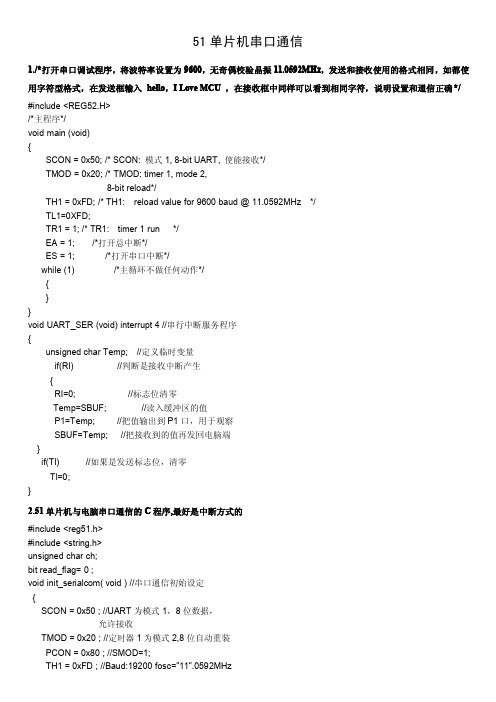
程序如下://这是一个单片机C51串口接收(中断)和发送例程,可以用来测试51单片机的中断接收//和查询发送,另外我觉得发送没有必要用中断,因为程序的开销是一样的#i nclude <reg51.h>#i nclude<stdio.h>#i nclude <string.h>#define INBUF_LEN 4 //数据长度unsigned char inbuf1[INBUF_LEN];unsigned char checksum,count3 , flag,temp,ch;bit read_flag=0;sbit cp=P1^1;sbit DIR=P1^2;int i;unsigned int xdata *RAMDATA; /*定义RAM地址指针*/unsigned char a[6] ={0x11,0x22,0x33,0x44,0x55,0x66} ;void init_serialcomm(void){SCON=0x50; //在11.0592MHz下,设置串行口波特率为9600,方式1,并允许接收PCON=0x00;ES=1;TMOD=0x21; //定时器工作于方式2,自动装载方式 TH0=(65536-1000)%256;TL0=(65536-1000)/256;TL1=0xfd;TH1=0xfd;ET0=1;TR0=1;TR1=1;// TI=0;EA=1;// TI=1;RAMDATA=0x1F45;}void serial () interrupt 4 using 3{if(RI){ RI=0;ch=SBUF;TI=1; //置SBUF空switch(ch){case 0x01 :printf("A"); TI=0;break;case 0x02 :printf("B"); TI=0;break;case 0x03 :printf("C"); TI=0;break;case 0x04 :printf("D"); TI=0;break; default :printf("fg"); TI=0;break; }}}//向串口发送一个字符void timer0() interrupt 1 using 3{// char i;flag++;TH0=0x00;TL0=0x00;if(flag==10){// cp=!cp;// for(i=0;i<6;i++)P2=0x25;TI=1;temp=*RAMDATA;printf("%c",temp); TI=0;// RAMDATA--;flag=0;}}//主程序main(){init_serialcomm(); //初始化串口//向6264中送数据{*RAMDATA=0x33;}while(1){*RAMDATA=0x33;;}}调试过程中遇到的问题:1. 发送过程:在发送时必须保证TI=1:即发送缓冲器为空,否则将导致数据发不出去,如果想强制发送可以用:TI=1.具体发送数据:利用printf(“akjdfaklfj”);函数直接发送即可。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
QT串口与51单片机通信通过这个小例子主要想说明QT怎样进行线程编程的思想,实例如图,好吧,下面是过程上一个例子我们采用的是手工编写代码的方法,这个例子我们来玩一下designer,其实Qt4己经把界面与功能分开了,用designer来进行界面设计,再手工编写一些功能,如信号与槽,这样开发效率会大大提高,呵呵,开一个终端,输入/usr/local/Trolltech/Qt-4.5.1/bin/designer,如果第一次打开出现字体不对,可以打开qtconfig进行一些相关配置,打开后我们新建一个Main Window,在右边的属性框中设置一下界面大小,1.我ARM板的LCD大小为320x240,所以我也设为320x240;2.左边是一些我们常用的窗口部件,这里我们用到一个lable标签来做显示,再放几个pushButton按钮,在属性objectName重新更改它的名字,改为我们记得的,这样在写功能时记得哪个按钮叫什么名字,对于一个初学QT的人来说,很想知道每一个部件到底有什么信号和槽,别急,我们可以这样来看,选中一个lable,按F4,再点击lable拖动出现接地符号时松开,弹出编辑信号与槽,这时左边列出的是信号,右边为槽,这里我们不用配置连接,等下我们再手工写,3最后我们用到一个lable标签和三个pushButton按钮,并命名为dis_label、writeButton、readButton、closeButton,然后保存为mainwindow.ui,这样designer就完工了,呵呵..4.下面我们编写一个线程,用于管理串口收发工作,它不涉及到任何界面,只做好它的本份工作就得了,编写一个thread.h文件gedit thread.h,#ifndef THREAD_H#define THREAD_H#include<QThread>class Thread:public QThread{Q_OBJECTpublic:Thread();char buf[128];volatile bool stopped;volatile bool write_rs;volatile bool read_rs;protected:virtual void run();};#endif我们定义一个Thread类,它继承于QThread,看到只设有一些变量和一个run函数,virtual表示为虚函数,你也可以去掉,加上去会增加一些内存开销,但提高了效率,对于这个小程序是看不出什么效果的,volatile这个大家都懂了吧,就是防止偷懒,呵呵,5.再看看thread.cpp#include"thread.h"#include <sys/types.h>#include <sys/stat.h>#include <fcntl.h>#include <termios.h> //串口用到的#include <stdio.h>#include <stdlib.h>#include <unistd.h>#include <strings.h>#define BAUDRATE B9600//#define RS_DEVICE "/dev/ttyS0" //串口1#define RS_DEVICE "/dev/ttySAC1" //串口1Thread::Thread(){} //析构void Thread::run() //这就是线程的具体工作了int fd,c=0,res;struct termios oldtio,newtio; //termios结构是用来保存波特率、字符大小等printf("start...\n");fd=open(RS_DEVICE,O_RDWR|O_NOCTTY); //以读写方式打开串口。
不控制TTYif(fd<0){perror("error");exit(1); //失败退出}printf("Open...\n");tcgetattr(fd,&oldtio); //保存当前设置到oldtiobzero(&newtio,sizeof(newtio)); //清除newtio结构,并重新对它的成员设置如下newtio.c_cflag=BAUDRATE|CS8|CLOCAL|CREAD; //9600、8位、忽略DCD信号、启用接收装置newtio.c_iflag|=IGNPAR; //忽略奇偶newtio.c_oflag=0;newtio.c_lflag=0;newtio.c_cc[VMIN]=0;newtio.c_cc[VTIME]=100; //在规定时间(VTIME)内读取(VMIN)个字符;tcflush(fd,TCIFLUSH); //清除所有队列在串口的输入与输出;tcsetattr(fd,TCSANOW,&newtio); //把我们的设置写入termioswhile(stopped) //stopped为0时将退出线程{if(write_rs) //write_rs为1时把字符串从串口中输出{write_rs=0;write(fd,"QtEmbedded-4.5.1",16);}if(read_rs) //read_rs为1时读取,并存在buf{read_rs=0;res=read(fd,buf,10);buf[res]=0;emit finished(); //读完后发一个信号}}printf("Close...\n");tcsetattr(fd,TCSANOW,&oldtio); //重新设置回原来的close(fd);quit();}QT有terminated()和wait函数来停止或暂停线程,为什么不用呢,具书上说会造成阻塞什么的,呵呵,我也不懂,所以我就用stopped变量来控制,让它死循环在那里,其它我已经在注释上说明了,应该没什么问题了吧,没有的话再写一个.6.mainwindow.h#ifndef MAINWINDOW_H#define MAINWINDOW_H#include<QtGui>#include"ui_mainwindow.h" //奇怪?这个头文件从哪里来的?呵呵,刚才用designer做的mainwindow.ui文件,经过make后会生成这个头文件,#include"thread.h" //把我们前面定义的线程包含进来class MainWindow:public QMainWindow,public Ui::MainWindow //多继承{Q_OBJECTpublic:MainWindow(QWidget *parent=0);public slots:void writeThread();void readThread();void closeThread();void display();private:Thread *yy;};#endifMainWindow继承于QMainWindow和MainWindow,即多继承,对于不是很复杂的程序,用多继承是一个较好的方法,如果程序较复杂,还是用单继承了,我们再看一下mainwindow.cpp,看这些槽具有什么功能:#include"mainwindow.h"MainWindow::MainWindow(QWidget *parent):QMainWindow(parent){setupUi(this);yy = new Thread;yy->start(); //启动线程yy->stopped=1; //初始化变量yy->write_rs=0;yy->read_rs=0;connect(writeButton,SIGNAL(clicked()),this,SLOT(writeThread())); //信号与槽connect(readButton,SIGNAL(clicked()),this,SLOT(readThread()));connect(closeButton,SIGNAL(clicked()),this,SLOT(closeThread()));connect(yy,SIGNAL(finished()),this,SLOT(display())); //前面线程读完了不是发一个信号么,这个信号就是发到这个槽}void MainWindow::display(){dis_label->setText(yy->buf); //读到的在dis_label显示,dis_label就是我们前面designer放的标签,}void MainWindow::writeThread() //前面线程都是根据stopped、write_rs、read_rs的状态来工作的^_^{yy->write_rs=1;}void MainWindow::readThread(){yy->read_rs=1;}void MainWindow::closeThread(){yy->stopped=0;}还差个main.cpp就完工了,哈哈...#include<QApplication>#include"mainwindow.h"int main(int argc,char *argv[]){QApplication app(argc,argv);MainWindow mw;mw.show();return app.exec();}啊!终于完成了,不!这只是完成了ARM这边,还有MCU这边,呵呵,很久不玩单片机了,下面为AT89S51编一个串口程序,并用1602来显示:/**************************************************************//* 三贱客龙& 07机电(1)班*//* 目标器件AT89S51 *//* 晶振11.0592 MHZ *//* 编译环境keil uVsion3 *//* 适用于51综合开发实验板*//**************************************************************//********************** 1602 ********************************//**************一定要关了上拉电阻再下载,有干拢****************/#include <reg51.h>#include <intrins.h>typedef unsigned char BYTE; //类型定义,编译时再处理typedef bit BOOL ; //位/****************串口部份**********************************/unsigned char key_s, key_v, tmp;sbit K1 = P1^4;BOOL flag1=0;BYTE i=0;BYTE z=0;void isr_uart(void); //串口中断服务函数void send_str(); // 传送字串bit scan_key(); // 扫描按键void proc_key(); // 键处理void delayms(unsigned char ms);com_init() //串口初始部分{TMOD = 0x20; // 定时器1工作于8位自动重载模式, 用于产生波特率方式2TH1 = 0xFD; // 波特率9600TL1 = 0xFD;SCON = 0x50; // 设定串行口工作方式为1且没有校验位PCON=0X00; // 波特率不倍增,倍增时为0x80TR1 = 1; // 启动定时器1运行ET1 = 0; // 禁T1定时器产生中断ES=1; //允串口中断EA=1; //开总中断}/****************************串口部分************************************/sbit rs = P2^0; // 寄存器选择sbit rw = P2^1; //读写信号线sbit ep = P2^2; //使能端sbit right = P2^6; //背光char idata display[16] = {"zhilong2382@163"}; //开机时显示的字符串char code str[] = {"xxxI Love you ! "}; //按K1时将发送这个内容,由于前3位对方总是收不到,这里用xxx干掉了,用串口调试助手也一样,delay(BYTE ms){ // 延时子程序BYTE i;while(ms--){for(i = 0; i< 250; i++){_nop_();_nop_();_nop_();_nop_();}}}BOOL lcd_bz() //只检测最高位{ // 测试LCD忙碌状态BOOL result;rs = 0; //指令寄存器rw = 1; //读ep = 1; //接收指令,为下降沿做准备_nop_(); //空语句,延时约1US_nop_();_nop_();_nop_();result = (BOOL)(P0 & 0x80); //取最高位ep = 0; //执行命令return result;}/************** 写入指令数据到LCD **************/lcd_wcmd(BYTE cmd){while(lcd_bz()); //忙时执行空语句rs = 0;rw = 0;ep = 0;_nop_();_nop_();P0 = cmd;_nop_();_nop_();_nop_();_nop_();ep = 1;_nop_();_nop_();_nop_();_nop_();ep = 0;}lcd_pos(BYTE pos){ //设定显示位置lcd_wcmd(pos | 0x80); //指令8}lcd_wdat(BYTE dat) //写入字符显示数据到LCD { //写入要显示的字符串while(lcd_bz()); //读忙rs = 1; //写数据命令rw = 0;ep = 0;P0 = dat;_nop_();_nop_();_nop_();_nop_();ep = 1;_nop_();_nop_();_nop_();_nop_();ep = 0;}lcd_init(){ //LCD初始化设定lcd_wcmd(0x38); //指令6,不检测忙信号delay(1);lcd_wcmd(0x0c); //指令4,显示开/关控制delay(1);lcd_wcmd(0x06); //指令3,输入模式delay(1);lcd_wcmd(0x01); //清除LCD的显示内容delay(1);}/*****************************************main********************************/ main(){BYTE i,j; j=0;right=0; //开背光lcd_init(); // LCDdelay(10);com_init(); // 初始化串口/*************** 显示内容及方式*********************/while(1){if(scan_key()) // 扫描按键第一遍为真{delayms(10); // 延时去抖动if(scan_key()) // 再次扫描{key_v = key_s; // 保存键值proc_key(); // 键处理}}lcd_wcmd(0x01); //清除LCD的显示内容delay(1);lcd_pos(0); // 设置显示位置为第一行的第3个字符i = 0;while(display[i] != '\0') //是否到字符串末尾{ // 显示字符lcd_wdat(display[i]);i++; delay(70);}}}// 扫描按键bit scan_key(){key_s = 0x00;key_s |= K1; //字节与位运算改变的是最低位return(key_s ^ key_v);}// 键处理void proc_key(){if((key_v & 0x01) == 0){ // K1按下TI=1; //send_str(); // 传送字串到PC}}// 每次传送完一串字符void send_str(){unsigned char i = 0;while(str[i] != '\0'){SBUF = str[i];while(!TI); // 等特数据传送,发完后TI=1TI = 0; // 清除数据传送标志i++; // 下一个字符}}// 延时子程序void delayms(unsigned char ms){unsigned char i;while(ms--){for(i = 0; i < 120; i++);}}void isr_uart(void) interrupt 4 //串口服务函数{if(RI==1){ RI=0;display[z]=SBUF;z++;if(z>=16)z=0;}if(TI==1)send_str();}呵呵,这个是我大一时学单片机时弄的,看起来乱乱的,但我保证绝对能用,程序编译后把hex 文件烧到单片机,插上串口线,串口线我是自己做的,注意有直通与交叉之分,一切准备好后,通电...怎么样,当在ARM板上点击write按钮时,将发送QtEmbedded-4.5.1给单片机,并在1602上显示出来,点read后,再按下p1.4键时(按久点,因为我是用查询方法读键),单片机发送xxxI Love you !给ARM,ARM板上显示I Love you !,怎么样,是不是更爽了,是的话我们再编一个复杂点的例子,编什么呢?PWM吧,可以用来控制电机的转速,我是学机电的,也就是我的专业是机电一体化,是不是很奇怪学机电的也搞程序?哈哈..兴趣!!这个例子为在QT上可以改变频率、占空比,并有语音提示,还专门编了个数字小键盘方便输入,代码下次再贴了。