ARM模拟器的设计与实现
ArmSim:基于ARM处理器的全系统模拟器

1邓立波1,龙翔1,高小鹏11北京航空航天大学计算机学院,北京(100083)E-mail:denglibo@摘要:模拟器作为嵌入式系统研究的基础研发工具,可辅助系统体系结构调优、软硬件协同设计。
本文实现了具有良好配置性及可扩展性的ArmSim模拟器,该模拟器是针对ARM 处理器的全系统模拟器,可在其上运行和调试ARM应用级和系统级的目标程序。
本文详细描述ArmSim的设计与实现细节。
关键词:ARM处理器模拟全系统模拟器中图分类号:1.引言随着嵌入式系统的飞速发展,嵌入式系统的研究与开发已经成为当今计算机科学的一个重要分支。
由于应用领域的特点,嵌入式系统研发通常需要依赖特定的硬件环境。
由于对硬件环境的过度依赖,因此传统的研究开发模式具有明显的缺陷,即软件开发与硬件开发无法并行展开。
这一方面致使研发周期过长,另一方面也使得设计工作缺乏足够的灵活性。
为了解决上述问题,基于软件的模拟器已经成为嵌入式系统研发中的主要技术手段之一。
软件模拟就是用计算机软件来模拟某一特定硬件系统的全部或部分的外部特性和内部功能,实现对目标硬件系统的高度仿真,使得运行在模拟器上的程序无法感知到底层硬件的存在,就如同运行在真实硬件平台上。
在嵌入式系统领域,软件模拟技术已经被广泛应用于嵌入式系统软硬件协同设计、嵌入式操作系统开发与评估以及大型嵌入式应用软件性能评估等方面。
本文描述的ArmSim是一个基于C语言的ARM处理器的全系统模拟器。
ArmSim实现了全系统硬件的功能模拟,不仅可以运行ELF格式的ARM应用级程序,而且可以运行ELF 映象或二进制映象格式的系统级程序,如U-Boot。
ArmSim模拟器还支持GDB等调试器对模拟器上运行的ARM程序进行源代码级远程调试。
本文其它部分的结构如下:第2部分对主要的模拟技术进行阐述;第3部分详细描述ArmSim模拟器的实现;第4部分为结论。
2.模拟技术全系统模拟器的实现主要包括指令集的模拟和外部设备的模拟。
ARM设计实验报告

目录一,实验目的二,实验软件, 硬件三,实验题目及要求(设计要求)四,软件时钟设计总体方案五,软件时钟的电路原理图六,程序流程图及C程序(软件部分)七,Proteus仿真图(硬件部分)一实验目的。
1,应用所学的ARM知识设计一个实时时钟掌握LPC2106中断处理, RTC的使用。
二实验软件, 硬件。
软件:proteus6.9仿真软件, ARM开发环境ADS.硬件: WINDOW 2000/XP PC机一台。
三实验题目及要求(设计要求)。
题目: 带报警功能并且可以调节时间的实时时钟。
要求: 1, 实时时间可通过按键选择调节。
2, 可以通过按键设定报警时间。
3, 当达到报警时间时, 蜂鸣器响一下, LED灯点亮。
4, 报警时间和实时时间通过液晶模块LCD1602显示四软件时钟设计总体方案本实验是基于LPC2106ARM处理器而设计的实时时钟, 综合性较强, 涉及到RTC外部中断, 引脚的GPIO功能, C语言编程等知识。
首先要定义P0口为基本I\O功能, 然后通过引脚功能选择寄存器PINSEL0及PINSEL1定义输入输出外部中断口所在的位, 另外还要对外部中断进行初始化, 其中有规定他们的优先级, 中断触发方式, 中断地址分配, 本实验采用液晶模块LCD1602同时显示实时时间和报警时间, 同样要对他们进行初始化, 包括检查总线忙与闲, 传送地址, 传送数据及显示函数的编程、1,LPC2106微控制器自带有一个实时时钟RTC带日历和时钟功能, 要使用它也要进行一下的基本操作:2,设置RTC基准时钟分频器3,初始化RTC的时钟值如, YEAR,MONTH,HOUR等4,启动RTC即CCR的CLKEN位职位5,读取完整时间寄存器值或等待中断。
陈述完以上的模块初始化后, 下面简要说明一下程序的流程先调用以上各个模块的初始化函数lcd_int(),RTCint()然后开启RTC时钟, 并调用LCD显示函数SendTimetRtc(),如果没用中断发生就判断实时时间是否与以设定的报警时间相同, 如果相同就马上接通蜂鸣器报警并且点亮LED灯。
《基于ARM嵌入式SoPC平台伺服模拟器的设计与实现》

《基于ARM嵌入式SoPC平台伺服模拟器的设计与实现》一、引言随着嵌入式系统的不断发展和普及,基于ARM架构的SoPC (System on a Programmable Chip)平台在工业控制、机器人技术、伺服驱动等领域得到了广泛应用。
伺服模拟器作为嵌入式系统中的重要组成部分,其设计与实现对于提高系统的性能和稳定性具有重要意义。
本文将介绍基于ARM嵌入式SoPC平台伺服模拟器的设计与实现过程,包括系统架构、硬件设计、软件设计、调试与测试等方面。
二、系统架构设计1. 总体架构基于ARM嵌入式SoPC平台的伺服模拟器系统架构主要包括硬件层、操作系统层和应用层。
硬件层包括ARM处理器、FPGA等硬件设备;操作系统层采用嵌入式实时操作系统,如Linux或RT-Thread等;应用层则根据具体需求进行定制开发。
2. 硬件设计硬件设计主要包括ARM处理器、FPGA等核心部件的选型和电路设计。
ARM处理器负责整个系统的控制和数据处理,FPGA则用于实现伺服控制算法和信号处理等功能。
在电路设计方面,需要考虑到功耗、稳定性、抗干扰性等因素。
三、软件设计1. 操作系统选择与定制根据系统需求,选择合适的嵌入式实时操作系统,并进行定制开发。
操作系统需要具备高实时性、低功耗、小体积等特点,以满足嵌入式系统的要求。
2. 驱动程序开发驱动程序是连接硬件和操作系统的桥梁,需要针对ARM处理器和FPGA等硬件设备进行开发。
驱动程序需要具备高效、稳定、可靠等特点,以保证系统的正常运行。
3. 应用软件开发应用软件是实现伺服模拟器功能的核心部分,需要根据具体需求进行定制开发。
应用软件需要具备实时性、精确性、可扩展性等特点,以满足不同应用场景的需求。
四、关键技术实现1. 伺服控制算法实现伺服控制算法是实现伺服模拟器功能的关键技术之一。
需要根据具体应用场景和需求,设计合适的控制算法,如PID控制、模糊控制等。
同时,需要考虑算法的实时性和精确性,以保证系统的性能和稳定性。
基于ARM微处理器的视频信号模拟器的设计与实现

从硬件设计来讲,构成视频信号模拟器要有丰富的接 口,例如:并行接口、LCD控制器接口、大量I/0口、I/0口 扩展、外部中断口和USB接口等。
ARM7TDMI内核的处理器¥3CA4BOX,作为模拟器 开发平台的硬件基础。该平台包括核心模块和扩展模块, 集成8 MBSDRAM,以保证用户代码可以获得最高性能,1
卸。设计主要创新点是在国内首次采用ARM实现了视频
信号的模拟,且具有回波图象逼真、可方便地实现多目标 模拟、系统扩展性好、用户界面友好等优点。
万方数据
参考文献 口 ] 田泽.嵌入式系统开发与应用教程[M].北京:北京航
空航天大学出版社,2005. 口 ] 周立功.ARM嵌入式系统软件开发实例[M].北京:
北京航空航天大学出版社,2004. 口 ] 倪祯浩,卢博友,田泽.基于mtM的信号发生器人机交
互系统设计口].微计算机信息,2007,23(5):134-136.
艮 ] 张万,董建威,佘黎煌.基于倒CsⅡ的心电监护仪软件
系统设计与开发[J].计算机工程,2007,33(9):277-279. 醑 ] 朱伟,王广君.基于ARM的嵌入式系统中从串配置
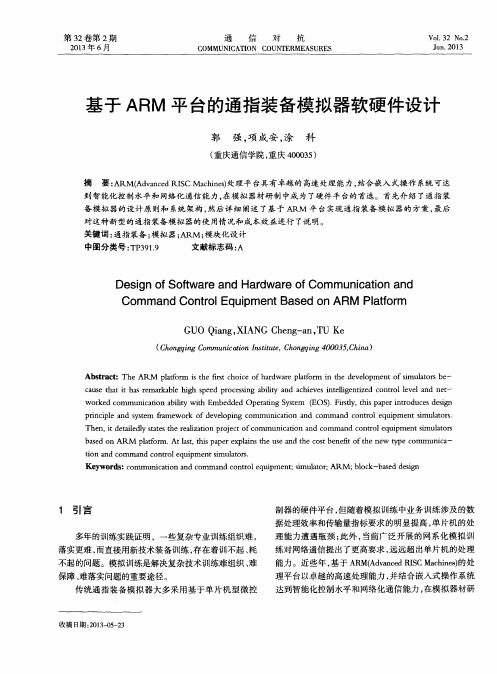
开机
系统初始化
◇。——1_一 tsar、显示处理
I 启动定时器
专三三互=二 -_。。‘‘。。‘。。。’。。。‘。’‘_‘。。‘’‘。。’1’。’’一 l。—运算—初1始·化一 I读装备控制信司
读当前目标参数 毋)映射区数据运算 AtB)映射区信号综Байду номын сангаас 运算方位指针递增
5—芝K—之罚叫!!轰Y:谕夕 1
*基金项目:国家重点基础研究项目资助(5132102ZZT32)
万方数据
·67·
基于X86平台的ARM指令集模拟器的设计

基于X86平台的ARM指令集模拟器的设计贾少波【摘要】With the development of embedded system software as well as the wide use of embedded applications in all kinds of fields for business,the embedded system development has beenemphasized.Nowadays,the refreshing rate of embedded software becomes faster.Therefore,it requests that the customized applications be developed during a shorter period.However,in general,the environment of embedded system run time is customized by consumers; hence the implementation of simulation for embedded hardware environment can highly improve the efficiency for embedded development.Aiming at this problem,considering the current study of ARM instruction set simulator in embedded system development,this article provides a design of ARM instruction set simulator.%随着嵌入式系统软件的发展,以及嵌入式应用在各个行业的普及,嵌入式系统开发已经被越来越多的人所关注.目前,嵌入式软件更新频率快,因此要求开发者在短期内能开发出具有针对型的应用程序,然而嵌入式系统运行环境往往是用户制定,并且运行在特定的硬件环境中.常规的软件开发方法往往导致嵌入式系统开发效率低下,同时大幅提高了开发成本.因此,实现对嵌入式系统硬件环境的仿真能有效提高嵌入式系统开发效率.本文针对此问题,结合现有ARM体系架构和指令集模拟器实现原理,提出了一套基于X86平台的ARM指令集模拟器的设计方案.【期刊名称】《电子设计工程》【年(卷),期】2013(021)012【总页数】4页(P164-166,169)【关键词】嵌入式系统开发;ARM体系架构;指令集模拟技术;ARM指令集模拟器【作者】贾少波【作者单位】西安财经学院信息与教育技术中心,陕西西安 710061【正文语种】中文【中图分类】TP302如今,仿真技术和虚拟技术被广泛应用各个领域,特别在嵌入式系统的开发过程中,由于在不同应用领域中,嵌入式开发要求的硬件体系差别很大,用软件进行系统仿真或虚拟硬件非常必要。
基于ARM平台的通指装备模拟器软硬件设计
Ab s t r a c t :Th e ARM p hf f o r m i s t h e ir f s t c h o i c e o f h a r d wa r e p l a t f o r m i n t h e d e v e l o p me n t o f s i mu l a t o r s b e — c a u s e t h a t i t h a s r e ma r k a b l e h i g h s pe e d p r o c e s s i n g a b i l i t y a nd a c h i e v e s i n t e l l i g e n t i z e d c o n t r o l l e v e l a n d n e t —
Th e n , i t d e t a i l e d l y s t a t e s t h e r e a l i z a t i o n p r o j e c t o f c o mmu n i c a t i o n a n d c o mma n d c o n t r o l e q u i p me n t s i mu l a t o r s
wo r k e d c o mmu n i c a i t o n a b i h t y、 Ⅳ i t l 1 E mb e d d e d Op e r a t i n g S y s t e m ( E os ) . F i r s t l y , t h i s p a p e r i n t r o d u c e s d e s i g n
ARM实时在线仿真器的设计与实现

东南大学硕士学位论文ARM实时在线仿真器的设计与实现姓名:钱德俊申请学位级别:硕士专业:微电子与固体电子指导教师:胡晨20070416第二章嵌入式系统调试原理X86的INT3),而另一些机器没有类似的指令,就用任意一条不能被解释执行的非法(保留)指令代替。
目标操作系统添加的这些模块统称为‘锸桩”(见图2.1)。
驻留在ROM中的插桩称为ROMmonitor。
图2.1“插桩”示意图运行于目标平台的被调试程序(Debugge*)要在入口处调用设置断点的函数以产生异常,异常处理程序调用调试端口通信模块,等待主机(Host)上的调试器(Debugger)发送信息。
双方建立连接后调试器便等待用户发出调试命令,目标系统等待调试器根据用户命令生成的指令,如图2.2所示。
运行调试器◆旨定调试通信端口可目标系统发消息JL………日标操作系统初始化至应用系统入口●主动触发异常◆异常处理程序转入调试端口通信▲主机目标平台图2.2主机与目标平台调试示意图“插桩”能完成被调试程序的下载,目标机内存和寄存器的读写,设置断点,单步执行被调试程序等功能。
一些高级的“插桩”能完成代码分析(CodeProfiling),系统分析(SystemProfiling),ROM空间的写操作,以及设置各种非常复杂的断点等功能。
利用“插桩”方式作为调试手段时,开发应用程序的步骤如下:1、编写代码。
2、编译应用代码。
3、将代码下载到目标上的RAM空间。
4、用户使用调试器进行调试。
5、如果程序正常转到第8步。
6、发现程序有问题,在调试器的帮助下定位错误。
7、修改错误,重复2-7步。
8、将程序固化到目标机上。
这一方案的实质是用软件接管目标系统的全部异常处理(Exceptionhandler)及部分中断处理,在其中插入调试端口通信模块,与主机的调试器交互。
这种调试方式的最大好处就是:简单、方便。
还可以支持许多高级的调试功能,并且可扩展性强,成本低廉,基本上不需要专门的调试硬件支持。
基于ARM处理器的智能机器人的设计与实现

基于ARM处理器的智能机器人的设计与实现近年来,智能机器人技术得到广泛应用,而基于ARM处理器的智能机器人更是备受瞩目。
本文将介绍基于ARM处理器的智能机器人的设计及实现。
一、设计思路智能机器人的设计需要从以下三个方面考虑:1.硬件方面:各种传感器、处理器等硬件的选型和布局设计。
2. 软件方面:智能机器人的控制系统、图像处理软件等的编写。
3. 机械方面:机器人的外形设计、机械臂的构造等。
基于ARM处理器的智能机器人,其硬件方面的设计中,首先需要确定ARM处理器的型号及其参数,如主频、内存容量、外设接口等。
另外,还需要根据机器人的应用场景,选用合适的传感器,如红外传感器、超声波传感器、视觉传感器等,并将传感器布局在合适的位置,以便机器人能够准确感知外界环境。
机器人的动力系统也是不可忽视的硬件部分,需选用合适的电机及其控制电路,以保证机器人能够完成各种动作任务。
在软件方面的设计中,需要编写机器人的控制系统软件,以便实现机器人的自主导航、避障、路径规划等功能。
此外,机器人的视觉处理软件也是非常重要的。
通过视觉传感器获取的图像信息,可以实现机器人的目标检测、物体识别等功能。
在机械方面的设计中,需要根据机器人的具体应用场景,设计出合适的外形和机械臂构造。
例如,在智能物流机器人中,需要考虑机器人的载重量和运载方式,因此需设计出合适的物品托盘和机械臂。
二、实现流程基于ARM处理器的智能机器人的实现流程,可以分为以下几个步骤:1. 硬件搭建。
根据设计方案,选购各种硬件器件,如ARM处理器、传感器、电机、电路板等,并进行组装布线。
2. 软件编写。
根据硬件搭建完成后的具体情况,编写控制系统软件、图像处理软件等。
3. 系统调试。
进行机器人的各项功能测试、参数调试,以验证机器人的性能是否符合设计要求。
4. 机械部分的制造和安装。
5. 软件部分的不断优化和更新。
三、应用场景基于ARM处理器的智能机器人适用于多个应用场景,如:1. 智能家居。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Design and implementation of a simulator of ARM
WEI Rong,XU Wei,MAI Yong-hao (Dept.of Information Technology,Hubei Univ.of Police,Wuhan 430034,China)
Abstract:To eliminate the barriers of the configuration to the development environment of embedded systems and improve the development efficiency,security and reliability of them,the design and implementation of a simulator on an ARM platform are studied,including the simulation of the processor and the peripherals.Based on the platform of S3C2440,the register,the instruction set and the pipeline of the ARM processor are firstly simulated.Then such main peripherals such as the interrupt controller,the serial port,the network interface card,and the clock controller are simulated.In the simulator,the boot loader is loaded and executed.The result verifies the correctness and the availability of the simulator.
· 10 ·
海军工程大学学报
第 28 卷
取代开发板等硬 件 的 功 能,但 通 过 它 可 以 比 较 容 易地进 入 到 嵌 入 式 软 件 开 发 的 广 阔 天 地 中。 同 时,开发者和研究 人 员 还 可 以 利 用 模 拟 器 完 成 某 些特殊的任务,如 处 理 器 指 令 集 设 计 的 正 确 性 验 证 、指 令 的 分 布 率 、程 序 执 行 的 覆 盖 度 分 析 等 。 本 文基于 ARM 指 令 的 特 征 值 计 算 及 分 析,进 行 了 对 ARM 处理器的模拟与设计。
ARM 有 7 种 工 作 模 式,每 一 种 模 式 都 可 以 访问 1 6 个通用寄存器,它们以 0 - 1 5 编 号(以 1 5 为编号的寄存器又称为 PC,即程序计数器),只是 这些编号对应的寄存器在不同模式下可能是不同 的。例如:编号为 0 的寄存器,在任何模式下都是 R0 寄存器,而编号为 8 的寄存器在除快中 断 模 式 以外的其他 模 式 下 都 对 应 R8 寄 存 器,而 在 快 中 断模式下则对应 R8_fiq 寄存器。
1.2 AMR 指令集模拟
指令集模拟 包 括 取 指、译 码 和 执 行。 在 取 指 阶段,先根据 程 序 计 数 器 PC 的 值 从 指 定 位 置 读 出 一 条 指 令 ,经 过 译 码 单 元 翻 译 出 这 条 指 令 ,然 后 在模拟器内 部 执 行。 在 译 码 阶 段,将 译 码 过 程 设 计成一个简单函 数,它 能 够 接 收 指 令 的 二 进 制 表 示,并返回对应的 指 令。 在 执 行 阶 段,由 于 ARM 体 系 结 构 支 持 庞 大 的 指 令 集 ,因 此 为 了 便 于 修 改 、 调 试 及 日 后 扩 展 ,本 文 采 用 模 块 化 的 方 法 :将 每 条 指令都设计为一 小 段 函 数,指 令 执 行 的 模 拟 方 法 即为调用该 函 数。 关 于 指 令 集 模 拟,还 需 要 考 虑 如下问题。
成 为 广 大 嵌 入 式 开 发 者/学 生 深 入 领 会 嵌 入 式 系 统底层知识的一个重大障碍。利用基于嵌入式模 拟器,开发人员则 无 需 将 应 用 程 序 下 载 到 开 发 板 上,直接在模拟器 中 运 行 即 可 掌 握 应 用 程 序 的 运 行 结 果 ,并 可 以 进 行 源 码 级 的 系 统 软 件 开 发 、方 便 修 改 与 调 试 ,提 高 了 开 发 效 率 。 而 在 现 阶 段 ,在 嵌 入式处理器 领 域,基 于 ARM 指 令 系 列 的 处 理 器 所占比例相当大。虽然 ARM 模拟器并 不 能 完全
在 ARM 处 理 器 模 拟 过 程 中,需 要 分 别 对 ARM 寄存器、ARM 指令集及 ARM 流水线进行模拟。
1.1 ARM 寄存器模拟
ARM 指令系列的处 理 器 属 于 32 位 的 RISC (reduce instruction set computer,精简指令集)体 系结构;它共有 37 个 32 位寄存器,大部分操作都 可由这些寄存器直接完成。由于寄存器是处理器 需要频繁访问的 资 源,因 此 如 何 设 计 一 个 简 单 高 效的方法将寄存器访问规则用程序表现出来是寄 存器模拟的主要问题。
后,在 ARM 模拟器上运行嵌入式 Bootloader 程序(Uboot),完成了功能测试盒的性 能 分 析,验 证 了 模 拟 器 设 计
的正确性和方法的可用性。
关键词:ARM 处理器;模拟器;指令译码
中图分类号:TP3 1 6
文献标志码:A
文章编号:1009-3486(201 6)02-0009-06
1)ARM 处理器是 32 位字长处理器,每 条 指 令的长 度 都 是 32 位,因 此 本 文 使 用 一 个 32 位 整 型变量来保存一条指令。
第2期
危 蓉 等:ARM 模拟器的设计与实现
· 11 ·
2)几乎每条 A行指令单元的开始处判断条件是否满 足(状态位的计算方法在 3.1 节给出)。即如果当 前条件不满足该指令的要求时,CPU 就会简 单 地 跳 过 这 条 指 令 ,继 续 执 行 下 一 条 指 令 。
1 ARM 处理器模拟
目前,有 多 种 ARM 平 台 的 模 拟 器,如 Android 模拟器,ARMware 模 拟 器,SkyEye 模 拟 器 等 。 [2] 其中,Android 模拟 器 是 Google 公 司 为 开 发者开发 Android 平台的应用程序而推出的一款 特定于 Android 系 统 的 ARM 模 拟 器[3],但 对 于 ARM 平台没有通用性;ARMware 是 台 湾 公 司 开 发的 一 款 优 秀 的 ARM 平 台 通 用 模 拟 器,但 ARMware 只 支 持 ARMv4 指 令 集,因 此 无 法 模 拟较新的、使 用 更 高 级 的 ARM 指 令 集 的 硬 件 平 台;SkyEye 模拟器是另一款优秀的 ARM 平台模 拟器,其指令 译 码 则 是 基 于 按 位 比 较 进 行 的。 其 他 一 些 优 秀 的 开 源 全 系 统 模 拟 器,如 GSim、 SimOS、OVPSim 等,为了模拟多种 CPU 结构,其 配置操作过程相对较复杂 。 [4]
在模拟 AMR 指 令 系 列 处 理 器 的 过 程 中,对 于运算指令,根据 相 应 的 运 算 法 则 计 算 结 果 并 修 改模拟器内部的 相 应 寄 存 器 或 内 存 的 值;对 于 访 问存储器指令,根 据 特 定 的 内 存 管 理 系 统 地 址 变 换规则计算出相 应 的 内 存 地 址,从 其 中 读 取 或 写 入 数 据 ;对 于 处 理 器 状 态 相 关 指 令 ,则 根 据 不 同 的 指令修改模拟器内部的处理器相关状态。因此,
3)ARM 处 理 器 有 两 套 指 令 集,即 ARM 指 令集和 Thumb 指 令 集,因 此 需 要 模 拟 两 套 指 令 集 ,并 且 能 够 在 指 令 集 间 进 行 切 换 ,而 本 文 主 要 针 对于 ARM 指令集的模拟。
第 28 卷 第 2 期 2016 年 4 月
海军工程大学学报
JOURNAL OF NAVAL UNIVERSITY OF ENGINEERING
DOI:10.7495/j .issn.1009-3486.201 6.02.003
ARM 模拟器的设计与实现
Vol.28 No.2 Apr.201 6
危 蓉,徐 伟,麦永浩
模拟器的工作原理是将需要运行的代码载入 到 模 拟 器 内 存 中 ,然 后 根 据 特 定 的 规 则 进 行 取 指 、 译码,以理解该指令的目的[5]。其中,处理器 的 指 令集模拟是整个模拟器的核心。通常有两种指令 集模拟方法:一是 将 目 标 平 台 的 指 令 反 汇 编 成 主 机 平 台 的 指 令 集 ,然 后 直 接 在 主 机 上 运 行 ;二 是 通 过软件的方法模拟目标平台的每条指令。前者的 优点是速度较快,但 由 于 目 标 平 台 和 主 机 平 台 的 指 令 集 的 差 异 性 ,导 致 某 些 模 拟 不 成 功 ,而 后 者 虽 然速度较慢,但可 以 在 主 机 上 模 拟 任 何 平 台 的 指 令 集 ,模 拟 器 经 过 取 指 ,再 根 据 特 定 的 规 则 进 行 译 码,可在内置 的 虚 拟 环 境 中 模 拟 指 令 的 执 行。 本 文研究的是第二种模拟方法的实现方式。