S1-非线性系统简介
非线性系统分析-PPT课件可修改文字
k(x a) y 0
k(x a)
x a | x | a xa
死区特性对系统性能的影响: (1)由于死去的存在,增大了系统的稳态误差,降低了 系统的控制精度; (2)若干扰信号落在死区段,可大大提高系统的抗干扰 能力。 2.饱和特性
y
M
a k
0a
x
M
M
y
kx
M
x a | x | a xa
1
2
平面,相应的分析法称为相平面法;
相平面上的点称为相点;
由某一初始条件出发在相平面上绘出的曲线称 为相平面轨迹,简称相轨迹;
不同初始条件下构成的相轨迹,称为相轨迹族, 由相轨迹族构成的图称为相平面图,简称相图。
2.相轨迹方程和平衡点
考察二阶非线性时不变微分方程:
x f (x, x)
引入相平面的概念,将二阶微分方程改写成二 元一阶微分方程组:
此时两个状态变量对时间的变化率 都为零,系统的状态不再发生变化,即 系统到达了平衡状态,相应的状态点 (相点)称为系统的平衡点。平衡点处 有的斜率
dx 2 dx2 dt 0 dx1 dx1 0
dt
则上式不能唯一确定其斜率,相轨迹上斜 率不确定的点在数学上也称为奇点,故平 衡点即为奇点。
奇点处,由于相轨迹的斜率dx2/dx1为 不定值,可理解为有多条相轨迹在此交汇 或由此出发,即相轨迹可以在奇点处相交。
初始条件不同时,上式表示的系统相轨迹是一 族同心椭圆,每一个椭圆对应一个等幅振动。在原 点处有一个平衡点(奇点),该奇点附近的相轨迹是 一族封闭椭圆曲线,这类奇点称为中心点。
无阻尼二阶线性系统的相轨迹
2、欠阻尼运动(01)
系统特征方程的根为一对具有负实部的共 轭复根,系统的零输入解为
非线性系统知识点总结

非线性系统知识点总结一、引言随着科学技术的发展,非线性系统在各个领域中扮演着愈发重要的角色,例如控制工程、经济学、生物学、化学等。
非线性系统的特点是其响应与输入之间不满足线性叠加原理,因此其动力学行为十分复杂。
在探究非线性系统的特性和行为规律中,需要深入研究和掌握一系列知识点。
本文将以非线性系统为基础,对其相关知识点进行总结和梳理,以期为相关研究提供一定的指导方向。
二、非线性系统的基本概念1. 线性系统与非线性系统在探究非线性系统之前,首先需要了解线性系统与非线性系统的区别与联系。
线性系统具有叠加性质,即输入信号的线性组合对应于输出信号的线性组合。
而非线性系统则不满足该叠加性质。
从数学上来说,线性系统的方程能够表示为一阶线性微分方程,即具有线性的数学形式,而非线性系统的方程则是包含非线性项的微分方程。
2. 非线性系统的特点非线性系统具有复杂的行为特性,其主要特点包括:不可分解性、不确定性、多稳态性、随机性等。
非线性系统在实际应用中往往表现出多样化的动力学行为,对于系统的建模和分析提出了更高的要求。
三、非线性系统的数学描述1. 非线性方程非线性系统的数学描述通常采用非线性微分方程来进行表达。
非线性微分方程一般具有如下形式:\[ \frac{dx}{dt} = f(x(t), t) \]其中 \( x(t) \) 表示系统的状态变量,\( t \) 表示时间,\( f(x(t), t) \) 表示系统的非线性函数。
非线性微分方程的求解往往需要借助于数值方法,例如Euler法、Runge-Kutta法等。
2. 非线性系统的相空间描述相空间描述是研究非线性系统动力学行为的重要方法之一。
通过将系统的状态变量表示为相空间中的点,可以直观地展现系统的动态特性。
非线性系统的相空间可能包括多个稳态点、极限环、混沌吸引子等复杂结构。
3. 非线性系统的周期轨道对于某些非线性系统,其动力学行为可能出现周期轨道。
周期轨道是指系统状态在相空间中呈现周期性变化的轨迹,通常通过极限环的存在来描述。
第七章 非线性系统

为不定值的点称为奇点。
0 0
奇点就是平衡Βιβλιοθήκη 。二、相平面法分析线性二阶系统
二阶线性系统的动力学方程为
2 2 n x n x 0 (I) x
x1 x 2 x x1 则上述方程可写为: 令 2 2 n x1 2 n x 2 x x x2 x1 x2 于是 g ( x1 , x 2 ) 二阶线性系统的相轨迹 2 x2 n x1 2 n x 2
A1 B1 1
1
2 0 2 0
y ( t ) co s td ( t )
1 a rc ta n
A1 B1
y ( t ) sin td ( t )
y1 ( t ) 与 x ( t )
描述函数N(A)为:
N ( A) Y1 A e
j 1
是同频的正弦量
1 A ( B 1 jA1 )
x(t )
非线性环节N
n(t )
(最佳逼近)
x(t )
线性环节L (描述函数)
y (t )
3. 描述函数基本思想: 是在正弦输入下,以非线性环节 输出中线性分量(基波)逼近实际输出。
描述函数
r (t )
e(t )
N
x(t )
G(s) 线性部分
c(t )
非线性环节
N的输入:e(t ) A sin t N的输出:x ( t )
§ 7.2. 非线性系统的相平面分析
一、相平面的基本概念
1.相平面:由系统某个变量及其导数 x , x 构成的用以描述系统状态的平面。
2.相轨迹:由系统变量及其导数随时间变化在相平面上描绘出来的轨迹。
《非线性系统》课件
混沌系统的特征和应用
敏感依赖
初值条件微小变化会导致系统演化的巨大差异。
不可预测性
在长时序演化中,混沌系统的状态基本是不可再现的。
应用领域
混沌系统在通信、保密、工程设计等领域有着重要的应用价值。
非线性系统的分析方法
1
极值稳定性分析法
2
通过分析系统处于极值时的稳定性性
质,来研究系统的演化规律和稳定性。
动力学方程和相空间
动力学方程
动力学方程描述了非线性系统的运动行为,如钟 摆、万有引力等。
相空间
相空间展示了非线性系统的运动信息,可以提供 直观分析方法。
混沌现象和混沌系统介绍
1
混沌现象
混沌现象指的是非线性系统具有极其灵敏的依赖于初值的性质,导致演化不可预 测的现象。
2
混沌系统
混沌系统具有非线性特征,普遍存在于复杂系统中,其运动是非常复杂而难以预 测的。
3
相平面分析法
通过绘制系统状态随时间的演化图案, 来研究系统的演化规律和稳定性。
相图和流图分析法
通过绘制相图和流图等图形,来分析 非线性系统的演化规律和稳定性。
非线性系统的解析方法
级数展开法和重整化理论
利用数学解析方法来求解非线性方程,对混沌系 统的研究和控制具有重要意义。
广义函数法和数值模拟
利用数值计算方法来模拟非线性系统的演化,能 够模拟许多真实系统的行为。
非线性系统的特点和分类
非线性反馈
反馈对系统演化和行为的影响是非线性的。
非平稳性
系统的特性随时间变化而变化。
非高斯性
随机变量分布不符合高斯(正态)分布规律。
非周期性
系统状态随时间没有固定的周期性演化。
S1-非线性系统简介
1.1 线性振动系统回顾
有阻尼受迫振动微分方程
x A sin t x 2n x
2 n 2 n
微分方程全解:齐次方程的通解+非齐次方程的特解
1.5
x2 (t ) Xsin ωt
1
1
0.5
1 2
2 2
2
0
-0.5
2 arctan 1 2
-1
0
5
10
15
20
25
30
35
40
45
50
1.1 线性振动系统回顾
线性有阻尼受迫振动:共振特性
( )
5
4 3 2
0.25 0.375 0 .5 1
1
1
2 2
(2 )2
0
0 .1
X A
1
0 0 1
2 3
返回首页
1.1 线性振动系统回顾
习题
(a) 用角位移、角速度和电压作为状态变量,写出 状态方程; (b) 设 P 0.815, EFD 1.22,1 2.0,2 2.7,3 1.7 6.6, M 0.0147, D / M 4
求出所有平衡点;
(c) 思考:假设时间常数比较大时的方程形式?
【动力系统】
“认识非线性”- 蝴蝶效应
电影:《蝴蝶效应》 THE BUTTERFLY EFFECT
“时光日记本”
Change one thing, change everything。
“认识非线性”- 混沌论
20世纪物理学三大理论:
相对论:否定了时间和空间的绝对性;(高速运动) 量子论:否定了粒子与波的绝对性;(微观运动) 混沌论:否定了可预见的绝对性;(非线性运动) “随时间而发生某种变化,其 变化并非随机而貌似随机”
01非线性系统概述
y
ka
a
a
x
ka
饱和非线性(Saturation)
• 输入幅度大时不能输出希望值 • 调节时间上升、动态误差上升 • 对自持振荡进行限幅
死区非线性(Dead zone)
• 输入小时没有输出 • 导致稳态误差 • 削弱系统输出振荡
非线性系统概述
典型的非线性系统:继电特性
非线性系统概述
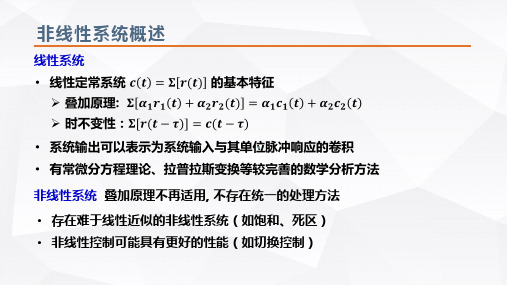
线性系统
非线性系统 叠加原理不再适用, 不存在统一的处理方法 • 存在难于线性近似的非线性系统(如饱和、死区) • 非线性控制可能具有更好的性能(如切换控制)
非线性系统概述
非线性改善系统性能的例子
r(t)
切换控制
a
c(t ) a
t1
r(t) ab
a
t1 c(t ) ab
t1
非线性系统概述
理想继电器
具有死区的继电器
• 提供快速切换,使系统响应更快、更光滑,但也可导致系统振荡ቤተ መጻሕፍቲ ባይዱ
非线性系统概述
典型的非线性系统:滞环与间隙特性
滞环非线性(Hysteresis)
• 导致系统响应迟钝 • 导致振荡
间(齿)隙非线性(Backlash)
• 对输入有延迟作用 • 可能导致振荡
非线性系统概述
典型非线性的组合
饱和 + 死区
线性+ 死区
继电 + 死区 + 滞环
第7章非线性系统-精品文档
N ( A ) N ( A ) e
j N ( A )
Y B jA 1j 1 1 1 e A A
2. 描述函数的求取步骤 (1) 取输入信号为,根据非线性环节的静态特性绘
制出输出非正弦周期信号的曲线形式,根据曲线形式 写出输出y(t)在一周期内的数学表达式。 (2)据非线性环节的静态特性及输出y(t)的数学表达 式,求相关系数A1、B1。 (3)用式(7-8)计算描述函数。
设非线性环节输入输出描述为
当其输入信号为正弦函数
y f (x )
x ( t ) A sin t
一般情况下,其输出y(t)为非正弦的周期信号。将y(t) 按傅里叶级数展开为
y ( t ) A ( A cos n t B sin n t ) A Y sin n t ( ) 0 n n 0 n n
死区特性对系统产生的主要影响有: (1)使系统存在稳态误差 系统受死区的影响,导致输出在时间 上的滞后,降低了系统的跟踪精度;而在另一方面,在系统动态 过程的稳态值附近,当系统输入端存在小扰动信号时,死区的作 用可减小扰动信号的影响。
(2)对系统动态性能影响的利弊由具体系统的结构和参数确定 例如,对某些系统死区的存在,会使系统动态过程超调量较大, 甚至导致其产生自激振荡;而对另一些系统死区的存在会抑制其 振荡,降低系统的超调量。
5.摩擦特性
摩擦特性是机械传动机构中普遍存在的非线性特性。摩擦力 阻挠系统的运动,即表现为与物体运动方向相反的制动力。
为改善系统跟踪过程的平稳性,可采取如下措施: 1)取良好的润滑或外加高频颤振信号的办法以减小静动摩擦 力矩的差值。 2)采取干扰补偿的办法,校正抵消摩擦力矩的影响。 3)采取增加系统阻尼的办法,减小转速脉动,提高平稳性
第七章 非线性系统的分析讲解

分析方法:频域上有描述函数法和波波夫法;时域 上有相平面法和李亚普诺夫第二法。计算机仿真的 方法也可以分析复杂的非线性系统。
§7.2
x(t)
非线性系统的描述函数分析法
n(t)
e
一、描述函数法的基本概念
非线性环节N
+ -
N
非线性部分
x
G(s) 线性部分
c
假设非线性系统的输入函数为
x(t ) A sin(t )
(t ) 0 y (t ) 0 y (t ) 0 y
间隙输出相位滞后,减小稳定性裕量,动特性变坏自 持振荡。同时使稳态误差增大。
5. 继电器特性
y M -a -ma ma a -M
y y M -a x -M a -M x -a a -M x M y
x
0 m a x(t ) a, 0 a x(t ) m a, y (t ) M sgn x(t ) M x(t ) m a, x(t ) m a, M
输出n(t)将是非正弦的周期信号。可以展成傅利叶级数, y(t)是由恒定分量、基波分量、和高次谐波组成。 பைடு நூலகம்设1:如果非线性部分的特性曲线具有中心对称性质,那以 输出信号y(t)的波形具有奇次对称性(波形的后半个周期重复 前半个周期的变化,但符号相反)输出不含直流分量,输出响 应的平均值为零。
假设2:线性部分具有良好的低通滤波性,那么高次谐波的幅值 远小于基波。闭环通道内近似地只有一次谐波信号流通。对于 一般的非线性系统而言这个条件是满足的,线性部分的低通滤 波性越好,用描述函数法分析的精度越高。 上述两个假设满足时,非线性环节的输入是一个正弦信号,系 统的输出是相同频率的正弦信号,对于非线性环节的输出只研 究其基波成分就足够了。 假设系统中非线性环节的输入函数为
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
“认识非线性”
Xt+1= f (Xt)
Xt+1= rXt
线性系统 X : 系统状态
非线性系统
t : 离散时间
f : 函数关系式
Xt+1= rXt (1-Xt)
“认识非线性”
Xt+1= rXt X0= 100
周期(periodic)行为
150 100 50 0 -50 -100 1 3 5 7 9 11 13 15 17 19
小车在水平方向上的牛顿定律:
F H ky My
1.3 非线性系统示例
小车倒立摆系统
mgL sin mL2 mLy cos I cos L 2 sin ) ky F m( My y L
1 mM mL cos ( ) y
( x0 x x0 ) ( x x0 ) ( x x0 )
F x0
“认识非线性”-工程振动
分段线性:弹性力是位移的分段线性函数。
• 连接弹簧存在间隙
• 弹簧有预紧力
F
x0 x0
F x
F0
x
0 F ( x) k ( x x0 ) k ( x x ) 0
“认识非线性”- 蝴蝶效应
电影:《蝴蝶效应》 THE BUTTERFLY EFFECT
“时光日记本”
Change one thing, change everything。
“认识非线性”- 混沌论
20世纪物理学三大理论:
相对论:否定了时间和空间的绝对性;(高速运动) 量子论:否定了粒子与波的绝对性;(微观运动) 混沌论:否定了可预见的绝对性;(非线性运动) “随时间而发生某种变化,其 变化并非随机而貌似随机”
机械工程研究生学科前沿课程——
《非线性系统理论》
教材:非线性系统(第三版)Hassan K.Khalil 著 2011 参考书:非线性系统理论及应用 非线性系统理论 非线性系统理论 授课教师:郜志英 课程考核:平时作业(40分)+考试成绩(60分)
北京科技大学机械工程学院
曹建福编著 2001
方勇纯 编著 2005 康惠骏 编著 2010
F F0 cos t
Ff cy 2 2 Fsp k (1 a y ) y
具有周期激励的非线性系统:达芬(Duffing)方程
2 3 my cy ky ka y F0 cos t
1.2 非线性系统模型 非线性振动模型:
cx kx f t mx
1.1 线性振动系统回顾
有阻尼受迫振动微分方程
x A sin t x 2n x
2 n 2 n
微分方程全解:齐次方程的通解+非齐次方程的特解
1.5
x2 (t ) Xsin ωt
1
1
0.5
1 2
2 2
2
0
-0.5
Section 4 非线性非自治系统
g sin 0 l
g 1 3 l 6
T
Fx 0 mx
2T x Fx 0 x ( EA T0 ) l l
3
Fx
T
l
m
Fx
通常弹性材料:硬特性非线性 超弹性材料:软特性非线性
单摆:软特性非线性
Section 1 非线性系统简介
衰减(decay)行为
120 100 80 60 40 20 0 1 3 5 7 9 11 t 13 15 17 19
X
X
1
3
5
7
9
11 t
13
15
17
19
Xt+1= 0.9Xt
Xt+1= 1.1Xt
“认识非线性”
Xt+1= rXt (1-Xt)
稳态(steady-state)行为
“认识非线性”
决定论
决定论
随机论
混沌论
Lorenz 《The Essence of Chaos》
“认识非线性”-工程振动
物理 新理论 新原理
新模型 新方法
数学
非线性 学科
控制
力学
新问题 新应用
机械系统
工程非线性振动问题
“认识非线性”-工程振动
材料非线性:当弹性元件的 材料应力超过比例极限,应 力-应变关系不再是线性关 系,弹性元件的恢复力与变 形不再是线性关系,弹性力 是位移的非线性函数。
初 相 位 角
返回首页
1.1 线性振动回顾
有阻尼自由振动微分方程
2 x 2n x n x 0
1.2 1 0.8 0.6 0.4 0.2 0 -0.2 -0.4 -0.6
x Aent sin(dt )
0 1 2 3 4 5 6 7 8 9 10
返回首页
Xt+1=3.99Xt (1-Xt)
“认识非线性”
Xt+1= rXt (1-Xt)
分岔 (bifurcation)
“认识非线性”
初值敏感性
Xt+1= rXt (1-Xt)
差之毫厘,谬以千里
“认识非线性”
假定某种昆虫,在不存在世代交叠的情况下(即 每年夏天成虫产卵后全部死亡,第二年春天每个虫 卵孵化成虫),很显然,若产卵数大于 1,虫口就会 迅速增加,“虫满为患”。
Two points attractor
0.2 0 1
Four points attractor
3 5 7 9 11 13 15 17 19
Xt+1= 3.2Xt (1-Xt)
Xt+1= 3.5Xt (1-Xt)
“认识非线性”
Xt+1= rXt (1-Xt)
非周期(non-periodic)行为 混沌 (chaos)
X
稳态(steady-state)行为
120 100 80 60 40 20 0 1 3 5 7 9 11 t 13 15 17 19
X
-150 t
Xt+1= 1.0Xt
Xt+1= -1.0Xt
“认识非线性”
Xt+1= rXt X0= 100
成长(growth)行为
700 600 500 400 300 200 100 0
习题
(a) 用角位移、角速度和电压作为状态变量,写出 状态方程; (b) 设 P 0.815, EFD 1.22,1 2.0,2 2.7,3 1.7 6.6, M 0.0147, D / M 4
求出所有平衡点;
(c) 思考:假设时间常数比较大时的方程形式?
【动力系统】
( x0 x x0 ) ( x x0 ) ( x x0 )
F0 kx ( x x0 ) F ( x) F0 kx ( x x0 )
“认识非线性”-工程振动
几何非线性:材料本身仍属于弹性范围,由于几何原因导致位 移较大,在建立运动微分方程时必须考虑这种位移,使得恢复 力与位移的关系成为非线性函数。 • 张紧的弦 • 单摆
, x) fc ( , x) fk ( , x) f , x, t fm ( x, x x, x x, x x, x
惯性力
阻尼力
弹性力 对于多数机械系统
激励力
fc ( x, x ) f k ( x, x ) f (t ) mx
1.2 非线性系统模型
f (t , x) x
状态方程
1.2 非线性系统模型
f (t , x) 状态方程: x
特例情况
非自治系统(时变系统)
f ( x) x
自治系统(时不变系统)
平衡点: f ( x) 0 x x
Section 1 非线性系统简介
目录
1.1 线性振动系统回顾
1.2 非线性系统模型 1.3 非线性系统示例
2 arctan 1 2
-1
0
5
10
15
20
25
30
35
40
45
50
1.1 线性振动系统回顾
线性有阻尼受迫振动:共振特性
( )
5
4 3 2
0.25 0.375 0 .5 1
1
1
2 2
(2 )2
0
0 .1
X A
1
0 0 1
2 3
返回首页
1.1 线性振动系统回顾
—— 连续系统:微分方程
dX / dt F ( X )
自治系统
dX / dt F ( X , t ) 非自治系统
—— 离散系统:离散映射
X n 1 f ( X n )
思考:离散映射系统的平衡点如何求解?
《非线性系统理论》
Section 1 非线性系统简介
Section 2 非线性离散系统 Section 3 非线性自治系统
Xt+1= rXt (1-Xt)
稳态(steady-state)行为
“认识非线性”
Xt+1= rXt (1-Xt) P=2
0.9 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0 1 3 5 7 9 11 13 15 17 19
周期(periodic)行为
P=4
1 0.8 0.6 0.4
fc ( x, x ) f k ( x, x ) f (t ) mx
将二阶常微分方程降阶为一阶常微分方程:
1 x2 x