1-3系统误差的发现和消除(精)
谈谈系统误差的产生原因及其消除或减少的方法

谈谈系统误差的产生原因及其消除或减少的方法在讨论随机误差时,总是有意忽略系统误差,认为它等于零。
若系统误差不存在,期望值就是真值。
但是,在实际工作中系统误差是不能忽略的。
所以要研究系统误差,发现和消除系统误差。
一、系统误差产生的原因在长期的测量实践中人们发现,系统误差的产生一般的与测量仪器或装置本身的准确程度有关;与测量者本身的状况及测量时的外界条件有关。
1、在检定或测试中,标准仪器或设备的本身存在一定的误差。
在进行计量检定,向下一级标准量值传递时,标准值的误差是固定不变的,属于系统误差。
又称为工具误差或仪器误差。
如:标称值为100g的砝码,经检定实际值为99.997g,即误差为+0.003g。
用此砝码去秤量其他物体的质量,按标称值使用,则始终把被测量秤大,产生+0.003g的恒定系统误差。
某些仪器或设备,在测量前须先进行调零位,若因测量前未调零位或存在调零偏差,使得标准仪器在测量前即具有某一初始值,该初始值必然直接影响测量结果,给测量结果带来误差。
这种误差,一般称零位误差,或简称零差。
某些仪器或设备,如未按要求放置,特别是某些电磁测量和无线电测量仪器或设备,未正确接地或屏蔽,或未用专用连接导线,也会给测量结果带来误差。
这种误差称为装置误差。
2、测量时的客观环境条件(如温度、湿度、恒定磁场等),也会给测量结果带来误差。
如,重力加速度因地点不同而异,若与重力加速度有关的某些测量,未按测量地点的不同加以适当的修正,也会给测量结果带来误差。
因这种误差是由客观环境因素引起的,一般把它称为环境误差。
3、由于某些测量方法的不完善,特别是检定与测试中所使用的某些仪器或设备,在设计制造时受某些条件的限制(如元器件,制造工艺等),不得不降低某些指标,采用一些近似公式,这也会给测量结果带来误差。
这种误差称方法误差或称理论误差。
4、在测量中,测量者本身生理上的某些缺陷,如听觉、视力等缺陷,也会给测量结果带来误差。
此项误差又称为人员误差。
第三章系统误差

P(T T T ) 1
所以(T-,T+)是T的1-α的臵信区间,给定显著性水平α,便 可求得相应的臵信区间。
例:对某量测得两组数据,判断两组间有无系统误差
xi 14.7, 14.8, 15.2, 15.6 yi 14.6, 15.0, 15.1
将两组数据混合排列成下表
若 K 2 3N 2 应怀疑存在系统误差
6、秩和检验法——用于检验两组数据间的系统误差
秩和检验是一种非参数检验法。它主要研究两个样本是否来 自同一总体,也就是检验两个总体是否相同的问题。严格地讲, 秩和检验只能解决两个总体分布的中心位臵是否相同的问题。 秩和检验最早是由wilcoxon做出的,后来Mann和Whitney算 出了小的n1和n2的T分布,并且找到了一般情况下的T的矩,证明 了对于大的T的n1和n2,T近似服从正态分布。
vi v i '
i 1 i 1 K
K
j k 1 n j k 1
v
n
j K
v ' ( l
j i 1
i
x )
j k 1
( l
n
j
x )
当测量次数足够多时有
v ' v
i 1 i j k 1
K
n
j
'0
设独立测得两组数据为:
x1, x2 , xn1
y1, y2 , yn 2
令变量
t (x y) n1n2 (n1 n2 2)
2 2 (n1 n2 )( n1S1 n2 S 2 )
由数理统计知,变量t是服从自由度为( n1 n2 2 )的t分布变量 其中
系统误差的处理
§1.3系统误差的处理实验工作中,在许多情况下,系统误差是影响测量结果精确度的主要因素,然而它又常常不明显地表示出来。
当它被疏忽时,会给实验结果带来严重的影响。
因此,找出系统误差,减少、修正或消除它的影响,估算它的大小,这是系统误差处理的重要因素。
一、系统误差的发现1.测量仪器往往是系统误差的主要来源为了保证仪器符合测量要求,应经常或定期对测量仪器进行校验,以便及时发现系统误差。
在实验中,还可以通过多个同类仪器进行比较,观察测量值的差异,找出它们一致性的数据,从中判定仪器的系统误差。
2.分析实验所依据的理论公式所要求的约束条件在测量中是否已满足。
将实验值与理论值或公认值进行比较,从中发现系统误差。
例如用单摆测重力加速度时,要求摆角很小,并可将实验中测得的重力加速度与公认值进行比较。
3.有意识地改变仪器的某些参量或使用条件,以便分析和判断其中的系统误差例如在光学实验中,怀疑是否因为观测者色盲而引进系统误差,可以更换观测者予以检查区别;又如,当用电流表测弱电流时,怀疑周围强磁场对测量引起系统误差,可把电流的方位转180°后再测一次,若两次测量值不同,可判定因强磁场的影响,测量中有系统误差存在。
二、系统误差的消除和修正系统误差的消除和修正,是指使其影响减小到仪器测量的精度以内。
否则,精确的测量便失去意义。
下面介绍对于系统误差进行消除和修正时常采用的几种方法。
1.修正法对于有些零值误差,如千分尺使用时间较长后产生的磨损,可引入一个修正值,在测量时进行修正。
对于仪器的示值误差,可通过与高精度仪器比较,或根据理论分析导出修正值,予以修正。
2.交换法在测量中对某些条件(如被测物的位置)进行交换,使产生系统误差的原因对测量结果起相反的作用。
例如,为了消除天平不等臂误差,可采用“复秤法”,即交换被测物和砝码的位置再测一次,取两次结果的平均值。
3.补偿法例如在量热学实验中,采用加冰降温,使系统的初温低于环境温度而吸热,以补偿在升温时的热损失。
系统误差
X1 X N X X N 1 , X '2 2 2 2 新序列的图如下图所示 X '1
可以看到,系统误差已经被消除
System Error
周期性系统误差的消除——半周期法
含有周期性系统误差的残差序列,残差的量值按周期变化, 要消除系统误差,首先要检测到周期大小。 从图(a)中可以看到 相隔半个周期的两个残 差的量值大小相等,符 号相反,能够相互抵消。
System Error
系統誤差
System Error
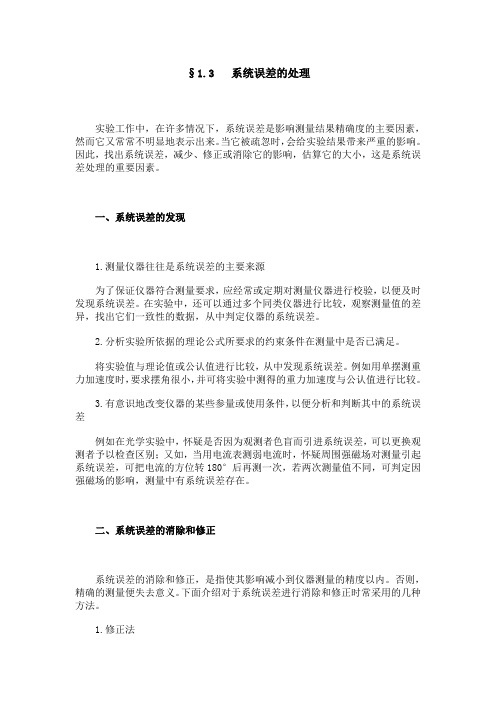
系统误差
系统误差是按确定规律变化的误差,其正负和大小均 可预知,这是系统误差与随机误差的不同之处。系统误差 和随机误差的不同之处还表现在系统误差的可控性,如在 讨论随机误差时,可以假设不存在系统误差,但任何情况 下随机误差都是要发生的,随机误差就是不可控的。 系统误差没有像随机误差一样的基本数据处理方法, 只能根据具体情况采取不同的方法来处理有关数据。
System Error
分类(规律)
线性变化的系统误差
x
x A A
变化系统误差
周期性变化的系统误差
System Error
分类(规律)
线性变化的系统误差
测量过程中,测量误差按时间顺序有规律的变化,如果这 种变化是能够确定的线性规律,这种误差被称之为按线性 变化的系统误差。
x
A
eg
当环境温度变化时, 如果测量仪表的测量 误差随温度线性变化, 在测量序列中会出现 线性变化的系统误差。 在测量序列中,线性变化的系 统误差只出现在有限的时间之 内,不能持续很长的一段时间
System Error
消除系统误差产生的根源
要减少系统误差要注意以下几个方面。 1.采用的测量方法及原理正确。 2.选用的仪器仪表的类型正确,准确度满足要求。 3.测量仪器应定期校准、检定,测量前要调零, 应按照操作规程正确使用仪器。对于精密测量必 要时要采取稳压、恒温、电磁屏蔽等措施。 4.条件许可,尽量采用数显仪器。 5.提高操作人员的操作水平及技能。
谈谈系统误差的产生原因及其消除或减少的方法(精)

谈谈系统误差的产生原因及其消除或减少的方法在讨论随机误差时,总是有意忽略系统误差,认为它等于零。
若系统误差不存在,期望值就是真值。
但是,在实际工作中系统误差是不能忽略的。
所以要研究系统误差,发现和消除系统误差。
一、系统误差产生的原因在长期的测量实践中人们发现,系统误差的产生一般的与测量仪器或装置本身的准确程度有关;与测量者本身的状况及测量时的外界条件有关。
1、在检定或测试中,标准仪器或设备的本身存在一定的误差。
在进行计量检定,向下一级标准量值传递时,标准值的误差是固定不变的,属于系统误差。
又称为工具误差或仪器误差。
如:标称值为100g的砝码,经检定实际值为99.997g,即误差为 0.003g。
用此砝码去秤量其他物体的质量,按标称值使用,则始终把被测量秤大,产生 0.003g的恒定系统误差。
某些仪器或设备,在测量前须先进行调零位,若因测量前未调零位或存在调零偏差,使得标准仪器在测量前即具有某一初始值,该初始值必然直接影响测量结果,给测量结果带来误差。
这种误差,一般称零位误差,或简称零差。
某些仪器或设备,如未按要求放置,特别是某些电磁测量和无线电测量仪器或设备,未正确接地或屏蔽,或未用专用连接导线,也会给测量结果带来误差。
这种误差称为装置误差。
2、测量时的客观环境条件(如温度、湿度、恒定磁场等),也会给测量结果带来误差。
如,重力加速度因地点不同而异,若与重力加速度有关的某些测量,未按测量地点的不同加以适当的修正,也会给测量结果带来误差。
因这种误差是由客观环境因素引起的,一般把它称为环境误差。
3、由于某些测量方法的不完善,特别是检定与测试中所使用的某些仪器或设备,在设计制造时受某些条件的限制(如元器件,制造工艺等),不得不降低某些指标,采用一些近似公式,这也会给测量结果带来误差。
这种误差称方法误差或称理论误差。
4、在测量中,测量者本身生理上的某些缺陷,如听觉、视力等缺陷,也会给测量结果带来误差。
此项误差又称为人员误差。
系统误差
如果测量条件稳定,没有明显的变值系统误差,且都服从正态分 布,则两列测得值的分布中心(数学期望)均将为理论均值 ,而 x1 和 x 都将为 的近似值。 2 根据 x1和 x2的近似程度,结合两者差异发生的概率,便可大致 确定两组测得值是只含有随机误差,还是也伴有系统误差存在。
均值与标准差比较法
具体情况分别改进仪器和实验装置以及提高测试技能予以
解决。
3- 8
激光数字波面干涉仪的系统误差来源
激光波长系统漂移 标准镜面局部缺陷的固定电噪声 干涉视场的系统噪声 波差多项式模型误差
3- 9
三、系统误差的分类与特征
1. 分类
(1)根据系统误差在测量过程中所具有的不 同变化特性分类。
恒定(常量) 可变(线性、周期性、其他复杂规律)
3- 26
可变系统误差的随机误差分布
对于测量过程中不同时 刻情形,由于可变系统误 差的存在,将随机误差的 测量值分布展开后呈现如 图所示: 可变系统误差造成测 量结果的算术均值变化、 分散性也变大的图形解 释:
2 4
t 4 时刻
t
3
t3 时刻 t t 2 时刻
t
1
t 1 时刻 t
3- 27
第三节 系统误差的发现方法
在计量工作中,常用标准器具或标准物质作为检定工具,来检定某测量器具的 标称值或测量值中是否含有显著的系统误差。标准器具所提供的标准量值的准确度 应该比被检定测量器具的要高出1~2个等级或至少高几倍以上。
(2)均值与标准差比较法
(2)均值与标准差比较法
用区间概率估计原理判定是否有定值误差:
p (t x ) x1 x2 (t x ) pa 1 a
3系统误差概念
p (− tσ ∆x ≤ x1 − x2 < tσ ∆x ) = pa
pa = p ( x1 − x2 < tσ ∆x )
pa 为与 t 对应的置信概率,也可写成
在给定置信概率 pa 时 ,若 x1 − x2 ≥ tσ ∆x ,则测量含有定值系统误差 。
7
3.2 系统误差的发现方法
例3.1 在不同条件下测某一尺寸,第一组测得的 x = 10.0236mm , 1 σ x = 0.2 µm ;第二组测得的 x2 = 10.0248mm , σ x = 0.2 µm 。
15
3.2 系统误差的发现方法
例3.3 测量一尺寸,将连续获得的测得值按先后顺序列于表3.2。试判断其 中是否含有系统误差。
表3.2
测量顺序 1 2 3 4 5 6 7 8 9 10 n=10
数据表
测得值 xi / mm 残差 34.588 34.589 34.588 34.590 34.592 34.594 34.596 34.600 34.600 34.603 -6 -5 -6 -4 -2 0 +2 +6 +6 +9
自由度 ν = n1 + n2 − 2 = 15,取置信概率 pa = 0.99 ,查附录表2得 t = 2.95 。 此时,∆x 的随机误差限为
tσ ∆x = 2.95 × 0.0174 = 0.051mm
∆x = x1 − x2 = 14.223 − 14.176 = 0.047mm ∆x < tσ ∆x
xi′ =
i =1 i
∑ x′ ∑ ( x + ∆ ) ∑ x′
n =
i =1 i 0
n
n
n
=
i =1
i
误差理论第二章系统误差处理
②线形变化的系统误差
即在测量过程中,误差值随测量值或时间的变化成比例地增大或减小。 如刻度值为1mm的标准刻尺,由于有刻划误差δ,每一刻度实际间 距为(1+δ/mm)mm,当用它与另一长度比较,得到比值为K, 则被测长度的实际值为:L=K(1+δ/mm)mm,但读数值为 Kmm,这就产生随测量值变化的线形系统误差-Kδ。(如杆秤) ③周期变化的系统误差
令变量t x y
nxny nx ny 2
,
nx ny
nx
2 x
ny
2 y
其中,x 1 nx
1 xi , y ny
yi
,
2 x
1 nx
xi
x
2
,
2 y
1 ny
2
yi y ,
取显著度,自由度nx ny 2,由t分布表查P t t 中的t,
若 t t ,则认为两组间无系统误差。
注:作 图比较!
4
(三)残余误差校核法
①用于发现线性系统误差
将测量列中前k个残余误差相加,后n-k个残余误差相加。两者相减,
差值Δ:
k
n
vi vi
i 1
ik 1
若Δ显著不为0,则认为测量列可能存在线性系统误差。
其中,当n为偶数时,k=n/2;当n为奇数时,k=(n+1)/2。该 校核法称为马科夫准则。它能有效地发现线性系统误差,但不能发 现不变的系统误差。
2
三、系统误差的发现
由于系统误差通常数值较大,产生原因复杂,需根据具体测量过程和 测量仪器具体分析。 常用的用于发现系统误差的方法: (一)实验对比法 是改变产生系统误差的条件进行不同条件的测量,以发现系统误差。 适用于发现不变的系统误差。(如用工商局的电子秤与小贩的秤比对) (二)残余误差观察法 是根据测量列的各个残余误差的大小和符号的变化规律,直接由误差 数据或误差曲线图形来判断有无系统误差。主要用于发现有规律变化 的系统误差。 具体办法:根据测量先后顺序,将测量列的残余误差列表或作图进行 观察,可以判断有无系统误差。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
4
大学物理实验
1.3 系统误差的发现和消除
1.3.1 系统误差的发现
系统误差产生的原因往往是已知的,它的出现一般也是有规律的,人们通过长期的实践和理论研究总结出一些发现系统误差的方法。
下面简述两种常用的方法。
1.理论分析法
所谓理论分析法就是观测者凭借所掌握的实验理论、实验方法和实验经验等,对实验所依据的理论公式的近似性、所采用的实验方法的完善性进行研究与分析,从中找出产生系统误差的某些主要根源,从而找出系统误差的方法。
例如,气垫导轨实验中,经理论分析知道,由于滑块与导轨之间存在一定的摩擦阻力,如果实验中作为无摩擦的理想情况来处理,就会产生与摩擦阻力有关的系统误差。
理论分析法是发现、确定系统误差的最基本的方法。
2.对比法
对比法就是改变实验的部分条件、甚至全部条件进行测量,分析改变前后所得的测量值是否有显著的不同,从中分析有无系统误差和探索系统误差来源的方法。
对比的方法有多种,其中包括不同实验方法的对比,使用不同测量仪器的对比,改变测量条件的对比,以及采用不同人员测量的对比等。
例如,将物体分别放在天平的左盘和右盘上进行称衡,可以发现天平不等臂引入的误差;精确地测量同一单摆在不同摆角时的周期值,可以发现周期与摆角有关。
以上介绍了两种发现系统误差的方法。
除此之外,还有一些发现系统误差的方法,在具体的实验中,我们应该注意学习。
1.3.2 系统误差的处理
我们在处理系统误差时,常将它分为两类来考虑,即已定系统误差和未定系统误差。
已定系统误差是指误差的绝对值和符号已经确定的系统误差,如电表、螺旋测微计的零位误差,测电压、电流时由于忽略表内阻引起的误差。
处理数据时,必须将已定系统误差从测量值中减去,得到修正后的测量值。
未定系统误差是指误差的绝对值和符号未确定的系统误差,如螺旋测微计制造时的螺纹公差等。
处理数据时,对这类误差一般要估计出其分布范围(大致对应于不确定度估计中的△B)。
实验中可以通过方案选择、参数设计、计量器具校准、环境条件控制等环节来减小未定系统误差的限值。
下面介绍几个具体的原则。
1.消除产生系统误差的因素
这要求我们对整个测量过程及测量装置进行必要的分析与研究,找出可能产生系统误差的原因。
例如,是否有近似公式或近似计算,测量仪器结构是否合理,测量环境方面是否有由于温度、湿度、气压、振动、电磁场等所引起的影响,观测者是否有估读刻度偏高或偏低的习惯等。
经过分析与研究,如果确认实验中有系统误差,则针对具体原因,采取相应措施使系统误差得以减小或消除。
第1章 测量误差与数据处理的基础知识 5
2.对测量结果加以修正
计算出要处理的系统误差之值,取其反号为修正值,加到测量结果上,使测量结果得到修正;或者在计算公式中加入修正项去消除某项系统误差;或者用更高一级的标准仪器校准一般仪器,得到修正值或修正曲线,从而使测量结果得以修正。
3.采用适当的测量方法
在测量过程中,根据系统误差的性质,选择适当的测量方法,使测得值中的系统误差相互抵消,从而消除系统误差对测量结果的影响。
例如,天平只有在两臂严格等长时,砝码的质量才等于被测物体的质量。
而事实上,天平两臂总不是严格等长的,即砝码的质量与物体的质量并不严格相等。
为了消除这种系统误差,可以采用所谓复称法称衡。
设天平左臂和右臂的长度分别为1l 与2l ,物体的质量为m ,先将物体放在天平的左盘上,砝码放在右盘上进
行称衡。
天平平衡时,砝码的质量为m ',于是可得到12ml m l '=。
然后将砝码放在天平的左
盘上,物体放在右盘上进行称衡。
天平平衡时,砝码的质量为m '',于是可得到12m l ml ''=。
根据以上两式,可得m =
总的来说,消除系统误差影响的原则就是首先设法使它不产生,如果做不到,就修正它或减小它,或者在测量过程中设法消除它的影响。