机械优化设计优化设计的数学基础
合集下载
机械优化设计-数学基础

ε高级无穷小量 有: z Δ
P0 P
= f x′ ( x0 , y0 )
Δx P0 P
′ + f y ( x0 , y 0 )
Δy P0 P
+
ε
P0 P
对上式取极限得:
∂z ′ = f x′ ( x0 , y0 ) cos α + f y ( x0 , y0 ) sin α ∂α
∂z 点P0切线方向导数 ∂t
写成矩阵形式
∂f ( x0 , y0 ) ∂f ( x0 , y0 ) ⎡ Δx ⎤ f ( x , y ) = f ( x0 , y 0 ) + [ , ]⎢ ⎥ ∂x ∂y ⎣ Δy ⎦ ⎡ ∂ 2 f ( x0 , y 0 ) ⎢ 1 ∂x 2 + [ Δx , Δy ]⎢ 2 ⎢ ∂ f ( x0 , y 0 ) 2! ⎢ ∂x∂y ⎣ ∂ 2 f ( x0 , y 0 ) ⎤ ⎥ Δx ∂x∂y ⎥⎡ ⎤ + ∂ 2 f ( x0 , y0 ) ⎥ ⎢ Δy ⎥ ⎣ ⎦ ⎥ 2 ∂y ⎦ ⎡ Δx ⎤ 1 ⎡ Δx ⎤ 2 T = f ( x0 , y0 ) + ∇ f ( x0 , y0 ) ⎢ ⎥ + [ Δx Δy ]∇ f ( x0 , y0 ) ⎢ ⎥ + ⎣ Δy ⎦ 2 ⎣ Δy ⎦
f ( x0 + Δx , y0 + Δy ) − f ( x0 , y0 ) P0 P
lim P P →0
0
存在,此极限称为函数沿 方向d的导数,记为:
∂z , α = 0, 偏导数 ∂x
∂z ( ) P0 , 或 f d′ ( x0 , y0 ) ∂d
由于
∂z π ,α= 2 ∂y
优化设计的数学基础
f x f x*
所以函数f(x)在 x* 处取得局部极小值,称x*为
局部极小点。 而优化问题一般是要求目标函数在某一区域内 的全局极小点。 函数的局部极小点是不是一定是全局极小点呢?
图2-7 下凸的一元函数
一、凸集
一个点集(或区域),如果连接其中任意两点 x1 x2
的线段都全部包含在该集合内,就称该点集为凸集, 否则为非凸集。
梯度 F ( x0 ) 模:
1
F ( x0 )
n i1
( F xi
)2 x0
2
函数的梯度方向与函数等值面相垂直,也就是 和等值面上过x0的一切曲线相垂直。
由于梯度的模因点而异,即函数在不同点处的
最大变化率是不同的。因此,梯度是函数的一种局 部性质。
梯度两个重要性质:
在工程中大多数优化问题,可表示为不等式约束 条件的优化问题。
有必要引出非线性优化问题的重要理论,是不等式 约束的多元函数的极值的必要条件。
库恩-塔克(Kuhn-Tucker)条件
一、一元函数在给定区间上的极值条件
一元函数f(x)在给定区间[a,b]上的极值问题,可以 写成下列具有不等式约束条件的优化问题:
集R内任意不同两点x1 x2 ,不等式
f x2 f x1 x2 x1 T f x1
恒成立。
2f(x)为定义在凸集R上且具有连续二阶导数的 函数,则f(x)在R上为凸函数的充要条件
Hesse矩阵在R上处处半正定。
f x0
f
x (0) 1
x1,
x20
x2
f
x10 , x20
lim
d
0
所以函数f(x)在 x* 处取得局部极小值,称x*为
局部极小点。 而优化问题一般是要求目标函数在某一区域内 的全局极小点。 函数的局部极小点是不是一定是全局极小点呢?
图2-7 下凸的一元函数
一、凸集
一个点集(或区域),如果连接其中任意两点 x1 x2
的线段都全部包含在该集合内,就称该点集为凸集, 否则为非凸集。
梯度 F ( x0 ) 模:
1
F ( x0 )
n i1
( F xi
)2 x0
2
函数的梯度方向与函数等值面相垂直,也就是 和等值面上过x0的一切曲线相垂直。
由于梯度的模因点而异,即函数在不同点处的
最大变化率是不同的。因此,梯度是函数的一种局 部性质。
梯度两个重要性质:
在工程中大多数优化问题,可表示为不等式约束 条件的优化问题。
有必要引出非线性优化问题的重要理论,是不等式 约束的多元函数的极值的必要条件。
库恩-塔克(Kuhn-Tucker)条件
一、一元函数在给定区间上的极值条件
一元函数f(x)在给定区间[a,b]上的极值问题,可以 写成下列具有不等式约束条件的优化问题:
集R内任意不同两点x1 x2 ,不等式
f x2 f x1 x2 x1 T f x1
恒成立。
2f(x)为定义在凸集R上且具有连续二阶导数的 函数,则f(x)在R上为凸函数的充要条件
Hesse矩阵在R上处处半正定。
f x0
f
x (0) 1
x1,
x20
x2
f
x10 , x20
lim
d
0
机械优化设计 优化设计的理论与数学基础

2 1
13
三、 二次型函数
机械优化设计
是指含有n个自变量的二次齐次函数
F ( X ) a11 x12 a12 x1 x2 ... a1n x1 xn a21 x2 x1 a22 x2 2 ... a2 n x2 xn ... a( n1)1 xn1 x1 a( n1)2 xn1 x2 ...a( n1)( n1) xn12 a( n1) n xn1 xn an1 xn x1 an 2 xn x2 ... ann xn 2
10
... ...
(4)
...
机械优化设计
2 2 2 x x x 例:求目标函数F(X) 1 2 3 2 x1 x2 2 x2 x3 3x3
的梯度和Hesse矩阵。 解:因为 F X 2 x1 2 x2
x1 F X
F X 2 x2 2 x1 2 x3 x2
机械优化设计
1.二元函数的Taylor 展开式(取到前三项)
F F (k ) ) ( x1 x1 ) ( x2 x2( k ) ) x1 x2 (1)
2 2 1 2 F 2 F F (k ) 2 (k ) (k ) [ 2 ( x1 x1 ) ( x1 x1 )( x2 x2 ) 2 ( x2 x2( k ) )2 ] Rn 2! x1 x1x2 x2
T
根据线性代数 1)对于X 0, 恒有F ( X ) 0, 则A为正定矩阵 ; 对于X 0, 恒有F ( X ) 0,则A为半正定矩阵 ; 对于X 0, 恒有F ( X ) 0,则A为负定矩阵 ; 2)若A为正定 ,则F ( X )称为正定二次型 .
16
13
三、 二次型函数
机械优化设计
是指含有n个自变量的二次齐次函数
F ( X ) a11 x12 a12 x1 x2 ... a1n x1 xn a21 x2 x1 a22 x2 2 ... a2 n x2 xn ... a( n1)1 xn1 x1 a( n1)2 xn1 x2 ...a( n1)( n1) xn12 a( n1) n xn1 xn an1 xn x1 an 2 xn x2 ... ann xn 2
10
... ...
(4)
...
机械优化设计
2 2 2 x x x 例:求目标函数F(X) 1 2 3 2 x1 x2 2 x2 x3 3x3
的梯度和Hesse矩阵。 解:因为 F X 2 x1 2 x2
x1 F X
F X 2 x2 2 x1 2 x3 x2
机械优化设计
1.二元函数的Taylor 展开式(取到前三项)
F F (k ) ) ( x1 x1 ) ( x2 x2( k ) ) x1 x2 (1)
2 2 1 2 F 2 F F (k ) 2 (k ) (k ) [ 2 ( x1 x1 ) ( x1 x1 )( x2 x2 ) 2 ( x2 x2( k ) )2 ] Rn 2! x1 x1x2 x2
T
根据线性代数 1)对于X 0, 恒有F ( X ) 0, 则A为正定矩阵 ; 对于X 0, 恒有F ( X ) 0,则A为半正定矩阵 ; 对于X 0, 恒有F ( X ) 0,则A为负定矩阵 ; 2)若A为正定 ,则F ( X )称为正定二次型 .
16
机械优化设计优化设计的数学基础

无约束优化问题的极值条件
无约束优化问题是使目标函数取得极小值, 极值条件是指目标函数取得极小值时极值点应 满足的条件。
ted with Aspos对e一.S元lEid函vea数sluf,aotr取io.N极nEo值Tn的l3y.必.5要C条lie件nt是Profile 5.2 Copyright 2004-20f11(xA0 )spo0se Pty Ltd.
1 2
x1
2
x2 102
0x1 2
2
x2
1
(x1 2)2 (x2 1)2
此函数的图像是以 x0 点为顶点的旋转抛物面。
第二章 优化设计的数学基础
四、Hesse 矩阵与正定
Hesse 矩阵的特性:是实对称矩阵。 H是正定矩阵的充要条件是它的所有主子式都大于0; H是负定矩阵的充要条件是它的所有奇数阶主子式都小于0,
处函数变化率最大的方向和数值。
解 函数变化率最大的方向就是梯度方向,用单位向
量 p 表示,其数值就是梯度的模。计算如下:
E vf a luation only.
ted withCAosppyorfsig(exh0.)St2li0dxxf0e12 4sx0-f2o0r221xx.121N42EATxs0 p3o.s524eCPliteynLt tPdr.ofile 5.2
H(x0)
x12 2 f
x1x2
2 f
2 0
0 2
E vxa2lxu1ationx22onlxy0.
ted withCAospfpy(oxr1si,gexh2.)St 2li0d120ex4s1-f2o0xr110.1NEAx2Tsp3xo.2s50 eHCP(lxite0y)nLtxxt12Pdr.oxx1f20i0le 5.2
(完整版)机械优化设计习题参考答案孙靖民第四版机械优化设计
1.Fibonacci法—理想方法,不常用。
2.黄金分割法(0.618法)
原理:提高搜索效率:1)每次只插一个值,利用一个前次的插值;2)每次的缩短率λ相同。左右对称。
程序:p52
(四)插值方法
1.抛物线法
原理:任意插3点:
算得: ; ;
要求:
设函数 用经过3点的抛物线 代替,有
解线代数方程
解得:
程序框图p57
网格法 ,缩小区间,继续搜索。
Monte Carlo方法 , ,随机数。
比较各次得到的 得解
遗传算法(专题)
(二)区间消去法(凸函数)
1.搜索区间的确定:高—低--高( )则区间内有极值。
2.区间消去法原理:在区间[a, b]内插两个点a1, b1保留有极值点区间,消去多余区间。
缩短率:
(三)0.618法
可行方向—约束允许的、函数减小的方向。(图)约束边界的切线与函数等高线的切线方向形成的区域。
数学模型
用内点法或混合法,取 ,
直接方法
(一)随机方向法
1.在可行域产生一个初始点 ,因 (约束),则
--(0,1)的随机数。
2.找k个随机方向,每个方向有n个方向余弦,要产生kn个随机数 , , ,随机方向的单位向量为
3.取一试验步长 ,计算每个方向的最优点
4.找出可行域中的最好点 得搜索方向 。以 为起点, 为搜索方向得 。最优点必须在可行域内或边界上,为此要逐步增加步长。
得
穷举下去得递推公式
3.算例
p73
4.框图p72
5.特点
作业:1. 2.
(六)变尺度法
1.引言
坐标变换
二次函数
令 为尺度变换矩阵
2.黄金分割法(0.618法)
原理:提高搜索效率:1)每次只插一个值,利用一个前次的插值;2)每次的缩短率λ相同。左右对称。
程序:p52
(四)插值方法
1.抛物线法
原理:任意插3点:
算得: ; ;
要求:
设函数 用经过3点的抛物线 代替,有
解线代数方程
解得:
程序框图p57
网格法 ,缩小区间,继续搜索。
Monte Carlo方法 , ,随机数。
比较各次得到的 得解
遗传算法(专题)
(二)区间消去法(凸函数)
1.搜索区间的确定:高—低--高( )则区间内有极值。
2.区间消去法原理:在区间[a, b]内插两个点a1, b1保留有极值点区间,消去多余区间。
缩短率:
(三)0.618法
可行方向—约束允许的、函数减小的方向。(图)约束边界的切线与函数等高线的切线方向形成的区域。
数学模型
用内点法或混合法,取 ,
直接方法
(一)随机方向法
1.在可行域产生一个初始点 ,因 (约束),则
--(0,1)的随机数。
2.找k个随机方向,每个方向有n个方向余弦,要产生kn个随机数 , , ,随机方向的单位向量为
3.取一试验步长 ,计算每个方向的最优点
4.找出可行域中的最好点 得搜索方向 。以 为起点, 为搜索方向得 。最优点必须在可行域内或边界上,为此要逐步增加步长。
得
穷举下去得递推公式
3.算例
p73
4.框图p72
5.特点
作业:1. 2.
(六)变尺度法
1.引言
坐标变换
二次函数
令 为尺度变换矩阵
机械优化设计方法

2 1 2 2 1 2 2
2 F B 2 h2 得到m(h) y h
第一章 优化设计概述
第一节 人字架的优化设计
解析法:
dm 2 F d B 2 h 2 2 F B2 求导 ( ) (1 2 ) 0 dh y dh h y h 解得h* B 152 cm 76cm 2 2F 代入D表达式D* 6.43cm T y 4 FB
l
θ
第一章 优化设计概述
第三节 优化设计问题的数学模型
优化问题的几何解释: 无约束优化问题:目标函数的极小点就是等值面的中心; 等式约束优化问题:设计变量x的设计点必须在 所表示的面或线上,为起作用约束。 不等式约束优化问题:可行点 g ( x) 0
h( x) 0
优化设计问题的数学模型的三要素:设计变量、目 标函数和约束条件。
第一章 优化设计概述
第三节 优化设计问题的数学模型
设计变量:
在设计过程中进行选择并最终必须确定的各项独立参数, 称为设计变量。
设计变量向量:
x [ x1x2
xn ]T
设计常量:参数中凡是可以根据设计要求事先给定的,称为设计常量 。 设计变量:需要在设计过程中优选的参数,称为设计变量。 连续设计变量:有界连续变化的量。 离散设计变量:表示为离散量。
钢管壁厚T=0.25cm,
钢管材料的弹性模量E=2.1×105Mpa, 材料密度ρ=7.8×103kg/m3,
许用压应力σy= 420MPa。
求在钢管压应力σ不超过许用压应力σy 和失稳临界应力σe的条件下, 人字架的高h和钢管平均直径D,使钢管总质量m为最小。
第一章 优化设计概述
第一节 人字架的优化设计
绪论
2 F B 2 h2 得到m(h) y h
第一章 优化设计概述
第一节 人字架的优化设计
解析法:
dm 2 F d B 2 h 2 2 F B2 求导 ( ) (1 2 ) 0 dh y dh h y h 解得h* B 152 cm 76cm 2 2F 代入D表达式D* 6.43cm T y 4 FB
l
θ
第一章 优化设计概述
第三节 优化设计问题的数学模型
优化问题的几何解释: 无约束优化问题:目标函数的极小点就是等值面的中心; 等式约束优化问题:设计变量x的设计点必须在 所表示的面或线上,为起作用约束。 不等式约束优化问题:可行点 g ( x) 0
h( x) 0
优化设计问题的数学模型的三要素:设计变量、目 标函数和约束条件。
第一章 优化设计概述
第三节 优化设计问题的数学模型
设计变量:
在设计过程中进行选择并最终必须确定的各项独立参数, 称为设计变量。
设计变量向量:
x [ x1x2
xn ]T
设计常量:参数中凡是可以根据设计要求事先给定的,称为设计常量 。 设计变量:需要在设计过程中优选的参数,称为设计变量。 连续设计变量:有界连续变化的量。 离散设计变量:表示为离散量。
钢管壁厚T=0.25cm,
钢管材料的弹性模量E=2.1×105Mpa, 材料密度ρ=7.8×103kg/m3,
许用压应力σy= 420MPa。
求在钢管压应力σ不超过许用压应力σy 和失稳临界应力σe的条件下, 人字架的高h和钢管平均直径D,使钢管总质量m为最小。
第一章 优化设计概述
第一节 人字架的优化设计
绪论
机械优化设计第二章

第二章 优化设计的数学基础
第二节 多元函数的泰勒展开
二次n维函数用向量和矩阵的表示方法:
若f ( x)是n维函数,则可按下式化为向量及矩阵形式: f ( x) f ( x1 , x2 , , xn ) aij xi x j bk xk c
i 1 j 1 k 1 n n n
第二章 优化设计的数学基础
第一节 多元函数的方向导数和梯度
一个多元函数可用偏导数的概念来研究函数沿各坐标方向 的变化率。 二元函数的偏导数: 一个二元函数f ( x1 , x2 )在点x0 ( x10 , x20 )处的偏导数是
f x1 f x2 f x10 x1 , x20 f x10 , x20 lim x1 0 x1 f x10 , x20 x2 f x10 , x20 lim x2 0 x2
向量d1的方向为:1 2 向量d 2的方向为:1
4
,
3
, 2
6
第二章 优化设计的数学基础
第一节 多元函数的方向导数和梯度
f T x f f 梯度: 二元函数f ( x1 , x2 )在点x0处的梯度是f ( x 0 ) 1 , f x1 x2 x0 x 2 x
d 0
偏导数与方向导数之间的数量关系:
f d lim
x0
f x10 x1 , x20 x2 f x10 , x20 d
d 0
lim lim f x1
d 0
f x10 x1 , x20 x2 f ( x10 x1 , x20 ) x2 x2 cos 1
第二章-机械优化设计
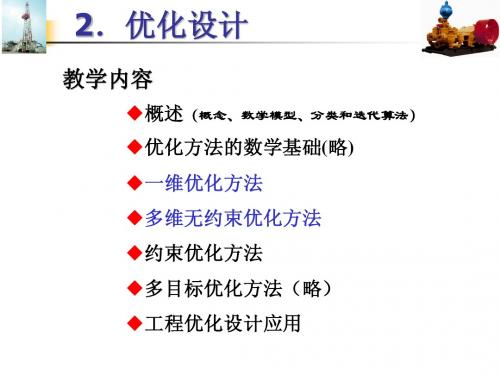
约束条件
gu ( X ) 0
hv ( X ) 0
二维问题的可行域
可行点(内点):可行域内的点。 内点所对应的设计方案都是可行方案。 非可行点(外点):可行域外的点。 外点所对应的设计方案都是不可行方 案,不能用。 边界设计点(极限设计点):处于 某一不等式约束边界上(即不等式约束 条件的极值条件gj(X)=0)的设计点。 边界设计点属可行设计点,它是一 个为该项约束所允许的极限设计方案。
约束条件: g1 X 4 x1 0
g 2 X x2 0 g 3 X x3 0
x2
独立变量
x1
(等式约束条件) h X 5 x1 x 2 x3 0
二、优化设计数学模型
h X 5 x1 x2 x3 0
x3 5 x1 x 2
等值线
二维目标函数等值线
目标函数 f ( X ) f ( x1 , x2 , xn )
在设计空间内,目标函数值相等点的连线:
■ 对于二维优化问题,构成了等值线;
对于三维优化问题,构成了等值面; ■ 对于四维以上的优化问题,则构成了等 值超曲面。
■
等值线
二维目标函数等值线
约束条件
gu ( X ) 0
目标函数 f ( X ) f ( x1 , x2 , xn )
目标函数是用来评价设计方案优劣的标准,又称评价函数。它是设计
变量的函数。 目标函数可以根据工程问题的要求从不同角度来建立。如:机械零 件设计中的重量、体积、效率、可靠性、几何尺寸、承载能力;机械设 计中的运动误差、功率、应力、动力特性;产品设计中的成本、寿命等。 目标函数是一个标量函数。目标函数值的大小,是评价设计质量优 劣的标准。在优化设计中,一般取最优值为目标函数的最小值(对于某些 追求目标函数极大值的问题,可把它转化为求其负值极小的问题)。该最 优值即为最优点X*,也即为最优设计方案。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
f (X ) b
(3) f (X ) X T X
f (X ) 2X
(4) Q为对称矩阵,f (X ) X TQX f (X ) 2QX
二次型
机械优化设计
二、多元函数的泰勒展开
1、一元函数
f x 在 x x0 点处的泰勒展开为:
f
x
f
x0
f
x0 x
1 2
f
x0 x2
其中 x x x0, x2 x x0 2
n i 1
f xi
x0
c os i
f (x0 )T d
f (x0 )
cos(f , d )
机械优化设计
多元函数的梯度的模:
f (x0 )
[
n
( f
2
)
]1/ 2
i1 xi x0
函数的梯度方向与函数的等值面相垂直,也 就是和等值面上过x0的一切曲线相垂直。
由于梯度的模因点而异,即函数在不同点处 的最大变化率是不同的。因此,梯度是函数的一 种局部性质。
4 2
42 (2)2
2 51
5
5
5
新点 x1
该点函数值
2
x1
x0
e
0 1
51
5 5
1
2
5 1
5 5
5 5
f
( x1 )
3x12
4x1x2
x22
x1
26 5
2
5
机械优化设计
常用梯度公式:
注意:梯度为向量
(1) f (X ) C(常数) f (X ) 0
(2) f (X ) bT X
解:
f x1
6 x1
4x2
f x2 4x1 2x2
则函数在 x0 [0,1]T 处的最速下降方向为
P
f
(
x
0
)
f
x1 f
6x1 4x2
4x1 2x2
x10
4 2
x2 x10
x2 1
x2 1
机械优化设计
该方向上的单位向量为
e f (x0 ) f (x0 )
f lim f (x10 x1, x20 ) f x10 , x20
x1 x0
x1 0
x1
f lim f (x10 , x20 x2 ) f x10 , x20
x2 x0
x2 0
x2
d 二元函数 f (x1, x2 ) 在 x0 x10, x20 点处沿某一方向
的变化率,其定义为
梯度的模:
f (x0 )
f x1
2
f x2
2
当梯度方向和d方向重合时,方向导数值 最大,即梯度方向是函数值变化最快方向, 而梯度的模就是函数值变化率的最大值。
机械优化设计
多元函数的梯度
f
x1 f
f
(
x0
)
x2
f
f x1
xn x0
f x2
f T
xn
x0
f
d
x0
机械优化设计
梯度的两个重要性质:
① 函数在某点的梯度不为零,则必与过该点的等值面垂 直(即为过点的等值线的法线方向); ② 梯度方向具有最大变化率方向
正梯度方向是函数值最速上升的方向, 负梯度方向是函数值最速下降的方向。
机械优化设计
例1:求二次函数 f x1, x2 x12 x22 4x1 4 在点 3,2T
海赛矩阵是由函数 f (x1, x2 ) 在点 x0 处的二阶偏
导数组成的方阵。由于函数的二次连续性,有:
2 f 2 f x2x1 x1x2
所以 G(x0 ) 矩阵为对阵方阵。
机械优化设计
3、多元函数
机械优化设计 2、二元函数
二元函数 f (x) 在 x0 (x10 , x20 )点处的泰勒展开式为:
f
x1, x2
f
(x10 , x20 )
f x1
x1
x0
f x2
x2
x0
1
2
f
2! x12
x0
x12
2
2 f x1x2
x0
x1x2
2 f x22
x22 ...
x0
其中: x1 x1 x10 , x2 x2 x20
处的梯度。
解:
f
f
(x)
x1 f
2x1
2x2
4
x2
在点 3,2T 处的梯度为:
f
( x1
)
2x1
2x2
4
2 4
机械优化设计
例2:试求二次函数 f x1, x2 3x12 4x1x2 x22在点 x0 0,1 T
处的最速下降方向,并求沿这个方向移动一个单位长 度后新点的目标函数值。
cos2
x0
f f
x1
,
x2
x0
cos1
cos
2
f
令
f
(x0 )
x1
f
x2
x0
f
x1
, f x2
T
x0
梯度
d
cos1
c
os
2
f d
x0
f (x0 )T d
f (x0 )
cos(f , d)
机械优化设计
f d
x0
f (x0 )T d
f (x0 )
cos(f , d)
机械优化设计 上式写成矩阵形式:
f (x)
f
( x0
)
f x1
1 2
x1
2 f
x2
x12 2 f
x1x2
f x2
x0
x1 x2
2 f
x1x2
2 f
x1 x2
x22 x0
机械优化设计
2 f
令
G(
x0
)
x12 2 f
x2x1
上式可写成
2 f
x1x2
2 f
x22 x0
x
x1 x2
f
x
f x0 f
x0 T x
1 2
xT
Gx0
x
Gx0 称为函数 f x1, x2 在 x0 (x10 , x20 ) 点处的
海赛(Hessian)矩阵
参见教材例题P30
机械优化设计
2 f
G ( x0
)
x12 2 f
x2x1
2 f
x1x2
2 f
x22
f lim f (x10 x1, x20 x2 ) f x10, x20
d d 0 x0
d
方向导数
机械优化设计
f lim f (x10 x1, x20 x2 ) f x10, x20
d d 0 x0
d
=
f x1
x0
cos1
+
f x2
x0
cos2
X2
d
偏导数与 方向导数
的关系
机械优化设计
第二章 优化设计的数学基础
一、多元函数的方向导数和梯度 二、多元函数的泰勒展开 三、无约束优化问题的极值条件 四、凸集、凸函数与凸规划 五、等式约束优化问题的极值条件 六、不等式约束优化问题的极值条件
机械优化设计
一、多元函数的方向导数和梯度
1、方向导数
二元函数 f (x1, x2 )在 x0 x10, x20 点处的偏导数的定义是:
X20
θ2
X0
△d △X2 △X1
θ1
O
X10
X1
图1 二维空间中的方向
机械优化设计
n元函数在点x0处沿d方向的方向导数
f d
x0
f x1
x0
cos1 ຫໍສະໝຸດ f x2x0cos2
f x1
xn
cosn
n i 1
f xi
x0
cosi
机械优化设计
2、二元函数的梯度
f d
x0
f x1
cos 1 +
x0
f x2