第四章 GPS定位基本原理
人教版高中地理选修7 第四章 4.1什么是GPS 【名校课件—集体备课】

Page 29
北斗导航系统
Page 30
北斗导航系统
Page 31
北斗系统主要有三大功能:
1.快速定位,为服务 区域内的用户提供全天 候、实时定位服务,定 位精度与GPS相当;
3.特别适合于集团用户大范围监控管理和数 据采集用户数据传输应用。
4.融合北斗导航定位系统和卫星增强系统两 大资源,因此也可利用GPS使之应用更加丰富。
5.自主系统,安全、可靠、稳定,保密性强, 适合关键部门应用。
Page 33
三、GPS系统的特点
(1)全球,全天候工作 (2)实时性,能提供连续、实时的三
测地接收机 用于精密大地测量 授时接收机 用于天文台及无线电通讯
定位精度高,仪器结构复杂,价 格较贵
利用GPS卫星提供的高精度时 间进行授时
Page 25
Page 26
应用领域
性能
优点
功能
手持 型 GPS 接受 机多 为导 航使 用
液晶显示,不需要地面 能够计算当地的国际标
导航画面 设备,只要 准时间,处于运动状态
Page 41
全球定位 系统
(GPS)
课堂小结
全新的定位工具
空间系统
GPS系统组成
地面监控系统 用户系统
GPS定位原理
二维定位原理 三球定位原理
Page 42
GPS定位原理
1.GPS由空间系统、地面监测系统、用 户系统三部分组成。
2.GPS定位原理类似于三球定位原理。由 若干已知空间位置的卫星发射信号,在地面(或 空中)的GPS接收机跟踪接收GPS卫星发出的信 号,测量卫星到接收机天线的传播时间,计算出 卫星到接收机的距离。如果接收到三颗卫星的信 号,GPS接收机即以各种卫星为圆心,以其到接 收机的距离为半径画三个球面,并确定球面与地 面的交点为接收机的位置。
《GPS定位原理》课件

GPS定位数据的安全性问题
为保护定位数据的安全,需加密传输和存储,限制授权访问,防止数据泄露和滥用。
GPS定位技术的社会影响与导 向
GPS定位技术的普及和应用,将在交通、农业、航空和其他领域创造更加智能、 高效、便利的生活方式。
《GPS定位原理》PPT课 件
本课程将介绍GPS定位的基本原理、技术的发展历史,以及在各个领域的应用。 让我们一起探索GPS技术的魅力和未来发展趋势。
什么是GPS定位?
GPS定位是一种全球定位系统,通过卫星和接收器共同工作,使人们能够在全 球任何地点确定自己的位置和导航目的地。
GPS定位的基本原理
航海导航
• 船舶利用GPS定位进行 航行导航和定位。
• 提高海上航行的准确性 和安全性。
渔业管理
利用GPS定位技术,进行渔船 定位和渔业资源管理。
监控渔船活动和渔场情况,保 护渔业资源。
海洋科学
科学家使用GPS定位系统跟踪 海洋潮流和动态,开展海洋研 究。 促进海洋科学的发展和海洋资 源的保护。
GPS定位的优缺点及挑战
结合GPS定位,实现农田灌溉的 智能化和精准化,节约水资源。
GPS定位在航空领域的应用
1
飞行导航
GPS定位系统广泛应用于飞机导航、自动
空中交通管制
2
驾驶和飞行路径规划。
利用GPS定位技术,实现空中交通的监控
和管理,避免飞行冲突。
3
飞机安全
航空公司使用GPS定位系统来跟踪飞机位 置,确保飞行安全。
GPS定位在海洋领域的应用
GPS定位相关的法律法规和标准
法律法规
• 各国制定了GPS定位的法律法规,保障其合 法使用。
• 规定了定位数据的隐私保护和使用限制。
第四章 GPS卫星导航电文和卫星信号
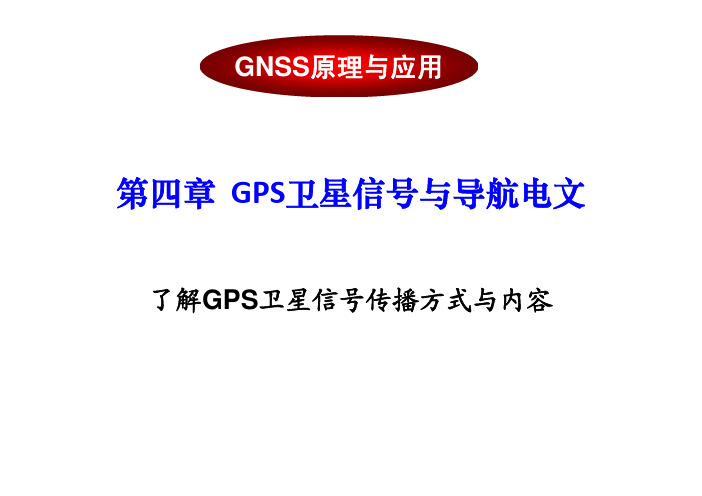
第4章GPS卫星的导航电文和卫星信号4.1 GPS卫星的导航电文GPS卫星的导航电文(简称卫星电文)是用户用来定位和导航的数据基础。
它主要包括:卫星星历、时钟改正、电离层时延改正、工作状态信息以及C/A码转换到捕获P码的信息。
这些信息以二进制码的形式,按规定格式组成,按帧向外播送,卫星电文又叫数据码(D码)。
他的基本单位是长1500bit的一个主帧,传输速率是50bit/s,30s传送完毕一个主帧。
一个主帧包括5个子帧,第1、2、3子帧各有10个字码,每个字码有30bit;第4,5子帧各有25个页面,共37500bit。
第1、2、3子帧每30秒重复一次,内容每小时更新一次。
第4,5子帧的全部信息则需要750s才能够传送完毕。
即第4、5子帧是12.5min播完一次,然后再重复之,其内容仅在卫星注入新的导航数据后才得以更新。
4.1.1 遥测码遥测码位于各子帧的开头,它用来表明卫星注入数据状态。
遥测码的第1-8bit 是同步码,使用户便于解释导航电文;第9-23bit为遥测电文,其中包括地面监控系统注入数据时的状态信息、诊断信息和其他信息。
第23和第24bit是连接码;第25-30bit为奇偶检验码,它用于发现和纠正错误。
4.1.2 转换码转换码位于每个子帧的第二个字码。
其作用是提供帮助用户从所捕获的C/A码转换到捕获P码的Z计数。
Z计数实际上是一个时间计数,它以从每星期起始时刻开始播发的D码子帧数为单位,给出了一个子帧开始瞬间的GPS时间。
由于每一子帧持续时间为6s,所以下一个子帧开始的时间为6xZ s,用户可以据此将接收机时钟精确对准GPS时,并快速捕获P码。
4.1.3 第一数据块第1子帧第3-10字码,主要内容:①标识码,时延差改正②星期序号③卫星的健康情况④数据龄期⑤卫星时钟改正系数等。
4.1.4第二数据块包含第2和第3子帧,其内容表示GPS卫星的星历,这些数据为用户提供了有关计算卫星运动位置的信息。
GPS定位的基本原理课件

i (Ti ) p (T p ) i (ti ) p (t p ) f ti f t p
26
1 基本原理
2 测码伪距 3 载波相位测量 4 卫星坐标
式中:
aip=-
X
p (T p )-Xi0
p i0
,b p=- Y i
p (T p )-Yi0
p i0
,cip=- Z
p (T p )-Zi0
p i0
,i
c ti
13
1 基本原理
2 测码伪距 3 载波相位测量 4 卫星坐标
2.3 伪距绝对定位原理(续)
如果一个历元同时观测了n个卫星,可列出n个形如上式的观测方程, 写成矩阵的形式为:
2.3 伪距绝对定位原理
卫星P的 GPS标准时
卫星钟面时间
tp T p tp
卫星P钟误差
接收机钟面时间
ti Ti ti
接收机i的 GPS标准时
接收机i钟误差
/ ti t p (Ti ti ) (T p t p ) (Ti T p ) ( ti t p ) ti t p
/ •c
用测得的传播时间代替 测距码的产生和测量和卫星 钟与接收机钟紧密相关。因 此, 测得的传播时间里含有 卫星钟和接收机钟的误差;
用光速近似 代替
信号在传播 过程中经过电 离层和对流层, 传播速度已不 完全为光速
星站几何 距离, 即 真实距离
/ 1 2 c ti c t p
伪距, 即测 得的距离
协 方 差 矩
DX 02QX
C/A码约为3
第四章-GPS定位基本原理

为P 码和W 码,然后再利用P
码来测距
原理
Z跟踪技术
将接收到的L1 和L2 信号分别和接 收机生成的、以P 码信号为基础的 复制信号相关,频带宽度降低到保 密W 码的带宽,从而得到未知的W 码调制信号的估值
应用反向频率信号处理法,将接收 到的信号减去这一W 码的估值, 就可以大部分消除W 码的影响, 进而恢复P 码
在相对定位中,至少其中一点或几个点的位置是已知的, 即其在WGS-84坐标系的坐标为已知,称之为基准点。
相对定位是高精度定位的基本方法
广泛应用于高精度大地控制网、精密工程测量、地球动 力学、地震监测网和导弹和火箭等外弹道测量方面。
动态定位
至少一台接收机处于运动状态,确定各观测时刻运动中 的接收机的绝对或相对位置关系。
GPS系统的定位过程可简述为如下步骤: 跟踪、选择卫星、接收选定卫星的信号。 解读、解算出卫星。 测量得到卫星和用户之间的相对位置。 解算得到用户的最可信赖位置。
“交会法” 定位
已知一颗卫星的位置和接收器到它的距离,就可以确定接收器在一个球面上。 已知两颗卫星的位置和接收器到它们的距离,就可以确定接收器在一个环上。 如果知道三颗卫星的位置和接收器到它们的距离,通常可以确定接收器一定
对于非特需用户, 采用Z 跟踪技术进行PRN 相关处理的积分 时间很短, 导致测量精度降低, 对于其他方式, 由于利用W 码 的近似信息和增加处理环节
导致伪距测量结果的误差增大
原来的高精度P 码在最终的伪距测量结果中并不是总能得到保证
虽然是采用同样的P 码, 由于测量方式和过程不同, 非特需 用户得到的P 码伪距精度低于特需用户的相应结果。
近来基本区分方法
静态:
接收机天线在测量期间静止不动。 测量的参数在测量期间是不随时间变化的。 目的是测量点位的坐标。
4第四章GPS卫星信号与导航电文
GNSS
P码-精码
• P码的产生原理与C/A码相似,但更复杂。发生电路采用的 是两组各由12级反馈移位寄存器构成。码长Nu≈2.35×1014比 特,码元宽为tu=1/f0=0.097752μs,相应的距离为29.3m。 周期为Tu= Nutu≈ 267d,数码率为10.23Mbit/s。
• P码的周期长,267天重复一次,实际应用时P码的周期被分 成38部分(每一部分为7天,码长约6.19 ×1012比特),其中 1部分闲置,5部分给地面监控站使用,32部分分配给不同卫 星,每颗卫星使用P码的不同部分,都具有相同的码长和周 期,但结构不同。
• P码的捕获一般是先捕获C/A码,再根据导航电文信息,捕 获P码。由于P码的码元宽度为C/A码的1/10,若取码元对齐 精度仍为码元宽度的1/10~1/100,则相应的距离误差为 2.93~ 0.29m,故P码称为精码(precision code)。
GNSS
GPS信号(示意)
测距码t
t + △t 数据码D(t)
载波L
GNSS
频率
GPS卫星时钟频率选用10.23MHz,利用频率综合器产生所需要
的频率。GPS信号的产生如下图:
基本频率ƒ0
10.23MHz
÷10
×154
L1
C/A码 P码
1575.42MHz 1.023MHz 10.23MHz
×120
模二加反馈 (e+f)
0 0 0 1 0 0 1 1 0 1 0 1 1 1 1
末级输出的二进制数
1 1 1 1 0 0 0 1 0 0 1 1 0 1 0
GPS定位系统的原理与使用方法

GPS定位系统的原理与使用方法GPS(全球定位系统)是一种基于卫星导航的定位技术,通过接收来自卫星的信号来确定地理位置。
本文将介绍GPS定位系统的原理和使用方法,帮助读者更好地理解和利用这一技术。
一、GPS定位系统的原理GPS定位系统是由一系列卫星、地面控制站和接收器组成的。
其原理基于三角测量法,通过测量接收器与多颗卫星之间的距离来确定接收器的位置。
1.卫星:GPS系统中有24颗工作卫星和几颗备用卫星,它们以近地轨道运行。
这些卫星通过广播无线电信号,携带有关其自身位置和时间的信息。
2.接收器:接收器是用户使用GPS定位系统的设备,它可以接收卫星发出的信号。
接收器通过计算信号的传播时间和接收到信号的卫星位置,来确定接收器的位置。
3.地面控制站:地面控制站负责监控卫星的运行状态和时钟精度,并向卫星发送校准信息。
GPS定位系统的原理可以简要概括为以下几个步骤:1.接收器接收卫星信号,并记录下接收时间。
2.接收器计算信号传播时间,即信号从卫星发射到接收器接收到的时间。
3.接收器通过多个卫星的信号传播时间,计算出接收器与每颗卫星之间的距离。
4.通过三角测量法,接收器确定自身位置。
二、GPS定位系统的使用方法使用GPS定位系统需要以下几个步骤:1.选购GPS设备:根据自身需求选择合适的GPS设备,如汽车导航仪、手机应用程序或户外定位器等。
2.激活GPS设备:根据设备说明书,激活GPS设备并确保其能够接收卫星信号。
3.等待信号:GPS设备需要一定时间来接收卫星信号并计算位置。
在设备首次使用或长时间未使用后,可能需要更长的时间来获取信号。
4.确定位置:一旦GPS设备接收到足够的卫星信号,它将计算位置并显示在屏幕上。
通常,设备会提供地图和导航功能,以帮助用户找到目的地。
5.使用导航功能:如果GPS设备具备导航功能,用户可以输入目的地,并按照设备的指示进行导航。
设备会提供转向指示、预计到达时间等信息,帮助用户准确到达目的地。
gps定位的基本原理
gps定位的基本原理GPS定位的基本原理。
GPS(Global Positioning System)是一种全球定位系统,它利用卫星信号来确定地球上任何一个点的精确位置。
GPS定位的基本原理涉及到卫星、接收器和地面控制站三个主要部分,下面我们来详细介绍一下GPS定位的基本原理。
首先,GPS系统是由24颗卫星组成的,它们分布在地球的中轨道上,每颗卫星都绕地球轨道运行。
这些卫星以恒定的速度绕地球运行,它们每天都会绕地球转两次,确保全天候都能覆盖地球上的任何区域。
这些卫星发射出的信号包含了卫星的位置和时间信息。
其次,GPS接收器是用来接收卫星发射出的信号,并计算出接收器所在位置的设备。
GPS接收器接收到至少三颗卫星的信号后,就能够计算出接收器所在位置的经度、纬度和海拔高度。
接收器通过测量信号的传播时间来确定卫星和接收器之间的距离,然后利用三角定位原理来计算出接收器的位置。
最后,地面控制站是用来监控和管理GPS系统的设备。
地面控制站负责监测卫星的运行状态、卫星发射信号的精确性和时钟校准等工作。
地面控制站还会不断地更新卫星的轨道信息和时钟校准参数,确保GPS系统的精准性和稳定性。
总的来说,GPS定位的基本原理就是通过卫星发射信号,接收器接收信号并计算出位置,地面控制站监控和管理整个系统。
通过这种方式,我们可以在任何时间、任何地点准确地确定自己的位置,实现导航、定位和测量等功能。
除了以上介绍的基本原理,GPS定位还涉及到信号传播延迟、多路径效应、大气层延迟等影响因素,这些因素都会对GPS定位的精度产生影响。
为了提高GPS定位的精度,科学家们不断地研究和改进GPS技术,提出了差分GPS、增强GPS等技术手段,以应对不同环境下的定位需求。
总之,GPS定位是一种基于卫星信号的全球定位技术,它的基本原理涉及到卫星、接收器和地面控制站三个主要部分。
通过这种技术,我们可以实现准确的导航、定位和测量功能,为人们的生活和工作带来了极大的便利。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
T+3
Signal is picked up by the receiver at time “T + 3”
Distance between satellite and receiver = “3 times the speed of light”
Pseudo Random Noise Code
按接收机运动状态分类:
静态定位
绝对定位 相对定位
动态定位
绝对定位 相对定位
绝对定位
将接收机安置在固定点上观测数分钟或更长时间,以 确定该点三维坐标。
在一个待定点上,利用GPS接收机观测4颗以上的GPS 卫星,独立确定待定点在地固坐标系的位置(目前为 WGPS-84坐标系),称之为绝对定位。
Accuracy?
plus/minus a second over more than 30,000 years!!
确定时间的必要性
至少有两个原因用户需要知道精确的时间: 1. 用户通过测量卫星信号的延迟来确定与卫星之间的距离。 2. 卫星、用户以及它们所在的坐标系(固定在地球上)都
是运动的。它们的位置都需要时间来确定。
也称时间延迟测量。
上述通过码相位观测或载波相位观测所确定的站星 距离都不可避免地含有卫星钟与接收机钟非同步误 差的影响,含钟差影响的距离通常称为伪距。
由码相位观测所确定的伪距简称测码伪距,由载波 相位观测所确定的伪距简称为测相伪距。
2.定位分类 按测距方法不同:
伪距法定位(速度快) 载波相位测量定位(精度高)
Time Difference
Satellite PRN
Receiver PRN
Distance Measuring
The whole system revolves around
time!!!
Distance = Rate x Time
Rate = 186,000 miles per second (Speed of Light)
第四章 GPS定位基本原理
概述
GPS定位的基本原理和过程
概论中已经简述GPS定位依据的是空间几何三点 定位原理。
为了消除时差引入的误差,GPS系统技术上采取 四星定位。
定位除依据星座的几何构图外,还必须有准确的 定时。
GPS卫星导航系统的定位精度取决于卫星和用户 间的几何结构、卫星星历精度、GPS系统时同步 精度、测距精度和机内噪声等诸因素的组合。
精确定位必须解决两个问题:确定卫星准确位置;准 确测定卫星到地面测点的距离。
1.测距方法
伪距测量(伪码测距):测量GPS卫星发射的测距码 信号到达用户接收机的传播时间。
载波相位测量:测量具有载波多普勒频移的GPS卫星 载波信号与接收机产生的参考信号之间的相位差。
多普勒测量:由积分多普勒计数得出的伪距。
所需观测时间较长,一般数小时,同时观测过程中,要求接收 机的震荡器保持高度稳定。
干涉测量:由干涉法测量得出的时间延迟。
所需设备较昂贵,数据处理复杂。
后两种种方法在GPS定位中,尚难以获得广泛应用。
目前广泛应用的基本观测量主要有码相位观测量和 载波相位观测量。
所谓码相位观测是测量GPS卫星发射的测距码信号 (C/A码或P码)到达用户接收机天线(观测站)的传播 时间。
Time = time it takes signal to travel from the SV to GPS receiver
Each satellite carries around four atomic clocks
Uses the oscillation of cesium and rubidium atoms to measure time
首先,根据卫星广播的星历,计算出第i颗卫星的准
确位置xi,yi,zi;
'
其次,根据测量的码伪距或相位的伪距,计算出用
户与第i颗卫星之间的相对距离 ;
最后,根据导航方法计算出用户的三维位置x,y, z;。
Position is Based on Time
Signal leaves satellite at time “T”
i:卫星的索引号; r i:到第i颗卫星的距离;
xsvi , ysvi , zsvi :第i颗卫星的位置;
(xue , yue , zue ):用户的位置,三个未知量。
GPS定位的置 如何测量出站星距离
'
GPS系统的实质(关键),是要得到用户 (载体)的高精度的瞬时位置。若根据前面在 概论中所描述的几何模型,定位过程就是:
GPS系统的定位过程可简述为如下步骤: 跟踪、选择卫星、接收选定卫星的信号。 解读、解算出卫星。 测量得到卫星和用户之间的相对位置。 解算得到用户的最可信赖位置。
“交会法” 定位
已知一颗卫星的位置和接收器到它的距离,就可以确定接收器在一个球面上。 已知两颗卫星的位置和接收器到它们的距离,就可以确定接收器在一个环上。 如果知道三颗卫星的位置和接收器到它们的距离,通常可以确定接收器一定
位于两点之一。若排除一点接收器的位置就确定了。
GPS术语: •卫星(Satellite) ---- Space Vehicle (SV); •接收器(Receiver) ---- User Equipment (UE)。
三个未知量需要三个方程
r1 (xsv1 xue )2 ( ysv1 yue )2 (zsv1 zue )2 r 2 (xsv2 xue )2 ( ysv2 yue )2 (zsv2 zue )2 r3 (xsv3 xue )2 ( ysv3 yue )2 (zsv3 zue )2
假设用户的时钟慢千分之一秒,于是延迟 就多了0.001秒,所测量得的距离也就多 了三百公里。
GPS卫星的速率大约是每秒3.87公里。 赤道上一点由于地球自转移动的速率是每 秒456米。所以以上千分之一秒的误差将 引起大约3870*0.001=3.87米的误差。
测距及定位基本方法与分类
GPS定位包括确定一个点的三维坐标与实现同步四个 未知参数。