ENVI遥感影像处理软件最新版本4
ENVI矢量处理普通遥感影像处理
ENVI⽮量处理普通遥感影像处理⽮量处理·在‘Available Vectors List’中能简单直观地控制⽮量层:编辑⽮量层名,编辑和转换⽮量投影·光栅—⽮量转换功能(⽤户可以把分类图及其它光栅数据转成⽮量数据)·⽮量—光栅转换功能·灵活的⽮量编辑功能·⽮量属性查询及属性编辑·⽮量图中光标位置查询·缓冲区分析(ENVI3.4版本新增)·在⽤户功能中,可读写ENVI⽮量⽂件(.evf),可删除ROIs·掩模⼯具⾥可输⼊ENVI⽮量⽂件·⽮量可输出为感兴趣区·允许⽤户将覆盖在ENVI窗⼝的上的等⾼线输出为ENVI⽮量⽂件格式(EVF)。
并可将EVF⽂件转为ArcView Shape⽂件,这样ENVI产⽣的等⾼线能被其他GIS软件包使⽤。
·当⽤ENVI⾃带的⾼分辨率世界地图数据来构建⽮量层时,可以按指定经纬度范围来提取特定区域的⾼分辨率⽮量信息。
· 提供直接GPS⽀持,GPS-Link使得从⼀个GPS上接受NMEA格式的lat/lon值成为可能。
ENVI的视窗增加了GPS-Link窗⼝,当接收到⼀个新点时,显⽰窗⼝会及时更新当前象元。
也可以将收集到的点输出到校正窗⼝,成为⼀个.evf⽂件,或是⼀ASCII⽂件。
⽤户可对每点添加注释并将它与列表中的其他点建⽴关联。
4.普通遥感影像处理4.1 地图投影与制图地图投影类型:Albers Equal AreaAzimuthial Equal AreaLambert Conformal ConicOblique Mercator (A & B)StereographicTransverse MercatorArbitrary (x,y)Geographic (lat/long)Gauss KrugerState Plane NAD 27 & NAD 83UTM User DefinedSpace Oblique Mercator A (generic)Intergerized SinusoidalNew Zealand Map GridRectified Skew Orthomorphic (RSO)·坐标转换·地图投影转换·⽀持所有标准椭圆(>35)和基准⾯(>100)·地图注记:— 磁偏⾓简图(真实、⽹状、磁北极)— 影像插图(灰度图、彩图)— 影像⽐例尺(⽶、英尺、公⾥)— TrueType字体— ⽤户⾃定义箭头·⽹格线(象元、经纬度、UTM⽹格),⽀持旋转的⽹格线。
Windows7安装遥感软件ENVI 4.8 (绝对成功)
Windows7安装Envi4.8简体中文破解版在正式安装前,建议先完整阅读本教程!本教程所使用的是Envi 4.8 32 位安装包,径测试,在64位windows7上可以正常安装使用!本教程就是在64位windows7上安装32位Envi4.8!当然XP和32位windows7更没问题了!1、安装找到下载好的安装包,双击打开Envi4.8.exe:点击“Setup”:点击“Next”选择“I accept……”——“Next”:点击“Browse”,选择安装目录,此处我选择安装在D盘,“Next”:基础运用呢默认就可以了,“Next”,开始安装,大概5——10分钟:询问是否使用许可证,选择“否N”,我们稍后设置:提示需重启完成安装,确定重启:为防止出现不必要的错误,最好重启,重启计算机后,接着进行破解!2、破解:找到下载的破解文件Envi4.8crack,打开:我们所用的是32位的安装包,所以选择32位的破解文件:复制ITT文件夹,找到刚才Envi4.8的安装目录D:\Program Files (x86)\ITT 覆盖安装目录的ITT文件夹破解完成:3、汉化:打开下载好的汉化文件:在“Envi4.8汉化补丁.exe”上点右键,选择“属性”:选择“兼容性”——勾选“以兼容模式运行”——“应用”——“确定”:双击运行 Envi4.8汉化补丁.exe ,下一步:同意许可,下一步:点击更改找到刚才我们设置的安装目录,如图示,下一步:确认信息,下一步:安装成功,点击完成,:Envi4.8汉化破解界面IDL界面此时,桌面上已经生成了3个快捷方式,为确保安装的完整性,请重启计算机,在从开始菜单或者桌面运行Envi4.8,好的我们的Envi4.8简体中文破解版就这样安装好了!。
ENVI5.4遥感应用与服务开发秘籍
自动识别传感器信息,由xml文件中获 取波长、定标参数、时间等信息,在 打开时自动更新。 自动更新定标参数、太阳辐照度; 识别含云量、获取时间、太阳高度角、 太阳方位角、传感器等元数据信息; 定标参数支持用户手动扩展。
App Store for ENVI
/appstore
• 只需一个 App Store for ENVI • 便可拥有众多 ENVI 扩展工具
中国国产卫星 支持工具 地形校正扩展
ENVI栅格图像批 处理工具包
ENVI批量快速 镶嵌工具
Sentinel-2 L1C
面向对象(Object-Oriented)
ENVI 5.x 提供全新的开发模式
虚拟栅格(Virtual Raster)
ENVIBinaryGTThresholdRaster ENVIBinaryLTThresholdRaster ENVICalibrateRaster ENVICastRaster ENVIDataValuesMaskRaster ENVIEqualizationStretchRaster ENVIFirstOrderEntropyTextureRaster ENVIGainOffsetRaster ENVIGainOffsetWithThresholdRaster ENVIGaussianStretchRaster ENVIHighClipRaster ENVIIrregularGridMetaspatialRaster ENVILabelEntropyTextureRaster ENVILayerStackRaster ENVILinearPercentStretchRaster ENVILinearRangeStretchRaster ENVILogStretchRaster ENVILowClipRaster ENVIMaskRaster
envi操作手册

envi操作手册
ENVI,全称为Environment,是一种遥感图像处理软件。
以下是ENVI软
件的基本操作手册:
1. 打开影像:在ENVI中,可以通过File菜单的Open选项或者直接点击工具栏上的Open按钮来打开影像。
在弹出的对话框中选择要打开的影像文件,然后点击OK即可。
2. 显示影像:打开影像后,可以通过点击工具栏上的Display按钮来显示影像。
在弹出的对话框中可以选择显示方式、颜色方案、透明度等参数,然后点击OK即可。
3. 调整影像大小:可以通过工具栏上的Zoom和Pan按钮来调整影像的大
小和位置。
Zoom按钮可以放大或缩小影像,Pan按钮可以平移影像。
4. 创建ROI(感兴趣区域):在ENVI中,可以通过工具栏上的ROI按钮来创建感兴趣区域。
在创建ROI时,可以选择不同的形状、大小和位置,并
且可以在ROI上添加标签和注解。
5. 提取光谱信息:在ENVI中,可以通过Spectral Analysis工具来提取光
谱信息。
可以选择不同的光谱分析方法,如光谱曲线、光谱角、光谱匹配等,并可以自定义波段和阈值等参数。
6. 生成图像地图:在ENVI中,可以通过Map工具来生成图像地图。
可以
选择不同的地图投影和坐标系,并可以添加图层、标注、符号等元素。
7. 导出数据:在ENVI中,可以将处理后的数据导出为多种格式,如TIFF、JPEG、BMP等。
在导出数据时,可以选择导出的范围、数据类型、分辨率等参数,并可以设置输出文件的格式和质量。
以上是ENVI软件的基本操作手册,希望对您有所帮助。
ENVI4.7破解及安装教程
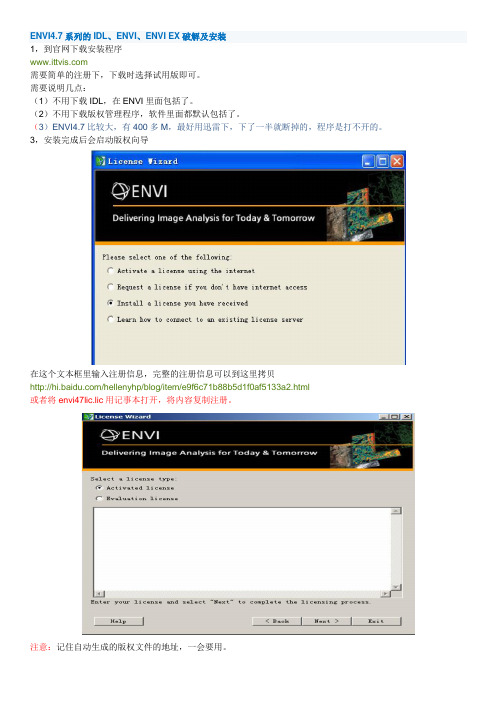
ENVI4.7系列的IDL、ENVI、ENVI EX破解及安装1,到官网下载安装程序需要简单的注册下,下载时选择试用版即可。
需要说明几点:(1)不用下载IDL,在ENVI里面包括了。
(2)不用下载版权管理程序,软件里面都默认包括了。
(3)ENVI4.7比较大,有400多M,最好用迅雷下,下了一半就断掉的,程序是打不开的。
3,安装完成后会启动版权向导在这个文本框里输入注册信息,完整的注册信息可以到这里拷贝/hellenyhp/blog/item/e9f6c71b88b5d1f0af5133a2.html或者将envi47lic.lic用记事本打开,将内容复制注册。
注意:记住自动生成的版权文件的地址,一会要用。
4,配置权限服务器LMtools(最关键的步骤,默认不需要配置)点击Config Services 栏,出现如下界面。
需要着重说明的是,如果安装了ArcGIS,默认出现的是ArcGIS的版权配置。
直接在Service Name输入自己想要的名字,然后开始配置Path to the lmgrd.exe file中点browse:C:\ProgramFiles\ITT\IDL71\bin\bin.x86\lmgrd.exe;Path to License File中点browse 选:上面自动生成的版权文件地址。
自动生成的是dat文件,默认打开的是lic文件,需要选择下打开文件类型。
Path to the debug log file中点browse,找到\ITT\license 目录,自己输入要写入日志文件的文件名,文件文件命名为*.log。
选中Use Service 和Start Server at Power Up,设置后点击Save Service按钮保存设置。
点击Stat\Stop\Restart 栏,点击Start Server 启动服务,看状态栏中是否提示Server Start Successful。
ENVI 4.4-----遥感影像处理的首选平台

ENVI 4.4-----遥感影像处理的首选平台ENVI4.4在原有ENVI强大功能的基础上,采用先进的算法和面向工作流的处理方法,提供了新的空间特征提取模块,增加了对新的数据格式的支持,增强了对矢量数据的支持。
即使是非专业技术人员也能利用ENVI4.4快速地进行图像处理,从而使得图像处理和分析更加简单、高效。
ENVI4.4新增了以下主要功能:∙流程化图像处理工具——SPEAR∙流程化图像特征提取模块——FX∙先进的波谱处理工具——植被抑制工具∙新的数据格式支持∙ENVI ZOOM对矢量的支持功能加强∙ENVI ZOOM中新的可视化工具SPEAR工具SPEAR(Spectral Processing Exploitation and Analysis Resource) 是一个用于管理图像处理流程的工具,SPEAR包含PCA变化检测、Subtractive变化检测、道路提取、水体提取、数据融合、分类及分类后处理、水的相对深度、波谱相似地物提取、植被指数工具、船只提取10个流程化图像处理工具。
SPEAR工具的特点如下:∙流程化:向导的方式进行流程化图像处理和信息挖掘∙易用:让非专业人员也能够熟练使用ENVI高级空间光谱分析技术∙快速:用SPEAR模块进行图像处理,速度比以前快了3-4 倍SPEAR子模块界面风格如下图所示:FX模块FX模块(Feature Extraction)采用流程向导的方式,快速从高分辨率全色或者多光谱数据中提取各种特征地物,如车辆、建筑、道路、河流、桥、河流、湖泊以及田地等。
FX模块的主要特征有以下几点:∙简单:采用流程化操作,通过分割、合并、分类三步就可以快速提取地物信息,使操作更简单。
∙精确:采用面向对象的特征提取方法,运用空间特征+纹理特征+波谱特征来提取信息,使提取的信息更准确。
∙快速交互:提供交互式预览窗口,可实时查看分割、合并、分类结果。
∙共享:可以共享流程运行过程中产生的参数,为以后的特征提取提供专家知识支持。
ENVI遥感影像处置

使用注记功能添加分类图例
• 从主影像窗口菜单栏中,选择Overlay>>Annotation。 • 选择Object>>Map Key,在影像上添加图例。经过
21
专题二 分类
• 1、非监督分类 • Classification>>Unsuoervised>>K-Means
或IsoData生成非监督分类旳影像
22
监督分类
• Classification>>Supervised>>[method], 在这里[Method]是下拉菜单中所列旳某个监 督分类法(Parallelepiped, Minimum Distance, Mahalanobis Distance, Maximum Likelihood, Spectral Angle Mapper, Binary Encoding或者Neural Net)
• 放置注记:在Text文本框中输入相 应旳文本,变化字体颜色、大小等, 然后在主影像窗口中合适旳位置上, 点击鼠标左键,接着文本会在所选 点旳位置上显示出来。使用左键拖 动文本注记小圆柄,在窗口中放置 文本注记。右键结束。
• File>>Save Annotation来保存。
15
添加网格
• 在主影像窗口中选择 Overlay>>Grid Lines。
• 能够变化显示叠合区域旳大小,只需按住鼠标中 键,并拖到一种合适旳区域即可。
13
矢量叠合与处理
• ENVI提供了一套矢量可视化和分析工具,涉及Arcview Shape文件旳输入、矢量编辑和矢量查询。
• 在可用波段列表中,单击TM旳波段4,选择Gray Scale, 单击Load Band,显示灰度影像;
ENVI4.8版本中高光谱遥感——SPEAR Tools简介

高光谱遥感——ENVI 4.8版本中的SPEAR Tools简介SPEAR Tools全称是光谱处理与分析工具(Spectral Processing Exploitation and Analysis Resource),在这里ENVI提供了一系列的处理工具,并形成向导引导使用者按照ENVI的标准处理影像。
SPEAR包含以下10个流程化处理模块:异常检测模块:搜索光谱不同的背景(谱异常)目标变化检测模块:检测统一地区不同时段光谱变化的异常谷歌地球桥接器:提供一个简单的方法将ENVI中的图像或矢量文件输出到Google Earth中道路提取模块:从影像中流程化提取道路信息水体提取模块:从影像中流程化提取河流,隐蔽水沟信息水的相对深度模块:从高光谱数据中快速获取感兴趣水域水的相对深度信息影像植被指数提取模块:快捷容易地确定植被的存在情况,并用多光谱图像可视化该植被的活力水平。
船只提取模块:船只提取模块,利用水和船的对比度。
以及船的纹理特征来提取船只信息。
1 异常检测模块(SPEAR Anomaly Detection)异常检测提供了一种方法来搜索光谱不同的背景(谱异常)目标,ENVI使用RXD异常探测算法来检测光谱信息异于影像背景值的目标。
由于植被在一些地区(比如在干燥的区域)光谱异常比较明显,SPEAR 异常检测模块提供了能够抑制植被的操作。
SPEAR异常检测模块能够依靠设定阈值来减小绝对误差。
SPEAR异常检测模块同时提供了滤波、核查和精度评定工具。
如果得出满意的结果,可以将其输出成shp文件的矢量格式。
从影像中提取异常信息操作流程如下:1.在ENVI主菜单栏下,选择Spectral > SPEAR Tools > Anomaly Detection。
弹出文件显示对话框,选择输入文件。
(输入的文件必须是能被ENVI识别的多光谱数据)设定保存路径。
2.设定算法模型,包括RXD、UTD、RXD-UTD。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
E N V I遥感影像处理软件最新版本4.2将于今秋推出!
继2004年E N V I4.1版本正式发布之后,E N V I下一版本4.2将于2005年秋季正式发布,目前正在 B e t a过程中。
E N V I4.2版本将会是E N V I软件发展过程中的一个重要里程碑,新版本将会沿着支持最新遥感传感器数据、快速进行地物空间和波谱信息自动获取和识别的方向,在影像快速预处理(影像自动配准)、快速D E M提取(摄影测量工具)、快速自动信息提取(多光谱、高光谱分析工具)等功能上进行了极大的强化:
•影像快速预处理工具——影像自动配准功能, E N V I的自动几何纠正工具可完成两幅图像控制点的自动选取,并对此两幅图像进行几何纠正。
传统的手工选取地面控
制点的方式如今可以被几秒钟的自动选点所取代,省时省力精度高!
•快速D E M提取——E N V I摄影测量工具包,从航片或立体像对中提取D E M,针对推扫式传感器 (A S T E R,I K O N O S,Q u i c k B i r d,O r b V i e w-3,S P O T5),全面支持R P C模型参数,尽可能用最少的地面控制点达到有效的精度。
•快速自动信息提取——E N V I新增S M A C C(S e q u e n t i a l M a x i m u m A n g l e C o n v e x C o n e)终端单元提取和B a n d M a x波谱角(S A M)目标探测器工具
S M A C C是一种新的自动识别实地地物的方法。
它是一种比传统的波谱影像处理
流程更自动化的方法,需要更少的先验知识和更少的时间。
基于B a n d M a x的波谱角(S A M)目标探测器工具允许用户使用B a n d M a x向导实现快速目标检测功能。
对于目标和背景比较相似或目标隐藏在较小的影像像元中的
区域检测效果尤佳。
可有效用于伪装物检测。
•植被分析工具:E N V I新的植被工具可产生用于精准农业、林业管理和火点监测的专题分类制图。
另外,植被指数计算器提供了更大的灵活性,可分析27种与绿度、光合有效利用率、植被冠层含氮、碳衰减、植被含水量及叶绿素相关的不同的植被指数。
•将原始的辐亮度转换为反射率:E N V I的l o g r e s i d u a l s工具降低了由于地形、大气、仪器自身及太阳光照的变化而引起的光谱噪音。
•无损影像波谱信息的影像融合算法:G r a m-S c h m i d t波谱锐化和P C波谱锐化,能有效保持融合前后影像波谱信息的一致性。
融合前 融合后 融合前后波谱曲线比较
大气校正模块F L A A S H2.0功能简介
F L A A S H2.0—— E N V I的扩展模块
F L A A S H可对L a n d s a t,S P O T,A V H R R,A S T E R,M O D I S,M E R I S,A A T S R,I R S等多光谱、高光谱数据、航空影像及自定义格式的高光谱影像进行快速大气校正分析。
能有效消除
大气和光照等因素对地物反射的影响,获得地物较为准确的反射率和辐射率、地表温度等真实物理模型参数。
F L A A S H采用M O D T R A N4+辐射传输模型,是目前精度最高的大气辐射校正模型,可校正由于漫反射引起的连带效应,包含卷云和不透明云层的分类图,可调整由于人为抑止而导致的波谱平滑。
F L A A S H波谱还原精度高。
它由A F R L(U S A i r
F o r c e R e s e a r c h L a b s)推广应用。
大气校正前影像图 大气校正后影像图
A S T E R-D T M模块助您快速从A S T E R数据提取D E M
可从ASTER数据中快速提取DEM提取模块!
RiverTools流域分析软件又推新版本3.0!
RiverTools 3.0现已发布!
R i v e r T o o l s是用I D L开发的专业的地形和河流网系提取和分析软件,它内建多种水文模型,能从超大型D E M中快速提取出河流排泄区的网络模型,并可以通过简单易用的用户界面为提取出的河流网络提供综合分析能力,如自动测量上游面积、河道长度、落差、坡度、曲率、流域密度、纵向剖面等等几何量和拓扑量等属性信息。
能用多种方式表现地形模型可视化,R i v e r T o o l s的强大地形和流域分析功能可用在洪水淹没模拟、流域分析、防汛工程、灾情分析、水文站水位流量分析、堤岸建设、数字流域等应用领域。
R i v e r T o o l s3.0功能更强大 ,界面更友好。
下载演示版即可看到它给我们带来的惊喜!R i v e r T o o l s3.0目前支持W i n d o w s,S o l a r i s及M a c O S X系统
以下是新版本的部分新增功能:
•快速提取运算法则
•新的洪水淹没面积统计方法
•栅格计算
•全面整合的H T M L帮助系统
•洪水淹没摸拟工具
•平面图、落差、切面斜率等属性信息的测量
•地图投影的增强支持
•支持新的D E M格式:M O L A,S R T M, A R C G r i d d e d A S C I I及G R D98
省时省力的影像完全自动配准功能——E N V I4.2提供
影像快速预处理工具——影像自动配准功能, E N V I的自动几何纠正工具可完成两幅图像控制点的自动选取,并对此两幅图像进行几何纠正。
传统的手工选取地面控制点的方式如今可以被几秒钟的自动选点所取代,省时省力精度高!
<<返回
I D L6.2推出i L a d a r模块
最新模块i L i D A R模块现在开始试用!
i L i D A R:一种新的专门处理L i D A R数据的I D L A p p l e t
多年来,遍布全球的I D L用户一直用I D L进行L i D A R(机载激光雷达)数据的分析和可视化。
现在,R S I为L i D A R应用设计了一种基本工具—i L i D A R。
它提供了一个实现L i D A R数
据分析和处理功能的环境。
目前,I D L用户可到w w w.i m a g e t e k i n f o.c o m免费下载i L i D A R。
在下载前您可能要提供一些您的基本信息。
请试用并给我们一些反馈信息。
想要获取更多的信息,请和我们联系:s u p p o r t@i m a g e t e k i n f o.c o m
D E M自动提取技术——E N V I4.2提供
快速D E M提取——E N V I摄影测量工具包,从航片或立体像对中提取D E M,针对推扫式传感器 (A S T E R,I K O N O S,Q u i c k B i r d,O r b V i e w-3,S P O T5),全面支持R P C模型参数,尽可能用最少的地面控制点达到有效的精度。
遥感影像用户——从国防、环境领域到科学和研究领域——都越来越需要准确的三维空间描述帮助他们分析图像。
E N V I的D E M提取模块可以帮你快速建立D E M,同时从影像中提取更多信息。
E N V I新的D E M提取模块提供了一个便于使用、基于向导的高精度数字高程模型生成工具,生成的D E M可用于正射校正、地形分析、可视化以及生成等高线地图。
此模块基于向导的工具带领你通过9个步骤轻松生成D E M:
1.选择立体影像
6.生成结点图像
2.选择地面控制点
7.设置输出的D E M的投影和大小
3.查看和编辑控制点
8.选择D E M提取参数
4.完成控制点收集
9.检查和编辑最终生成的D E M 5.查看和编辑控制点
去伪装目标识别技术——E N V I B a n d M a x工具
基于B a n d M a x的波谱角(S A M)目标探测器工具允许用户使用B a n d M a x向导实现快速目标检测功能。
对于目标和背景比较相似或目标隐藏在较小的影像像元中的区域检测效果尤佳。
可有效用于伪装物检测。
B a n d M a x工具特别适用于
与背景十分相近的目标物的识别
目标物被部分隐藏
目标物过于微小,甚至小至只有一个像元
此工具被成功应用于
识别位于植被伪装物之下的军事车辆、如坦克等
识别毒品种植区
寻找宇航器及飞机碎片
植被伪装的坦克 运用E N V I 进行地物识别的结果
E N V I 在海啸后环境监测中的应用
采用受2004年12月26日海啸影响的印尼海岸的 Q u i c k B i r d 多光谱影像数据,通过匹配、变化检测分类等功能,对海啸前后海岸的变化进行比较分析。
利用E N V I 的正射纠正和最新的自动生成影像间匹配控制点的功能对影像进行配准,并选取影像空间子集(如右图所示),以便于比较和节省处理时间。
采用波谱角(S A M)分类的方法,利用E N V I的影像自动变化检测功能,将对应的类别进行关联,并进行统计检查。
最后将分类结果转成矢量层,叠加在海啸前的影像上,从而可以获得海啸对该地区造成的影响。
海啸前 海啸后。