摄像模组光学基本知识
手机光学基础知识
• e. Blemish 在3100K和5100K两个标准灯光内分别拍摄一张图,判断是否有坏点脏污等在摄像头镜头光学 区域。
• 3.FQC &OQC检查:品质管理部门模拟用户体验对手机摄像头进行拍照等检测发现图片有偏红或偏蓝等现 象。
• b .SFR MAR 在10CM物距条件下,开启camera自动对焦,依据软体演算法,拍出对焦最清楚的一张照片, 然后分析照片上的既定感测区块(由内而外那些黑方块)的SFR解析度,判断清晰度是否在规格内.
• c. OIS_Shift 光学防抖,这有两个不同原理测试防抖的方法,一个是手机固定不动拍摄一张图,然后通过 adb 指令推动VCM让镜头抖动,等镜头恢复正常后,再拍摄一张图,对比前后两张图的差异是否在规格内。
• 1.QT Test :Camera ping test 用测试软件下adb 指令对摄像头是否连接开机的简单测试。
• BO Test :
• a .SFR INF在10M物距条件下,开启camera自动对焦,依据软体演算法,拍出对焦最清楚的一张照片, 然后分析照片上的既定感测区块(由内而外那些黑方块)的SFR解析度,判断清晰度是否在规格内.
手机光学基础知识
一、手机摄像头模组器件 二、手机主要测试项目 三、手机摄像头主要不良及原因
一、手机摄像头模组器件
•LTER. • 图像传感器SENSOR • FPC,连接器和周边电子元件 • VCM AF驱动组件
二、手机主要测试项目
• 3.OIS_Shift不良原因:马达焊接不良,驱动IC损坏,镜头被卡住,测试环境不稳定,测试设备及其软体问 题等。
摄像模组常识
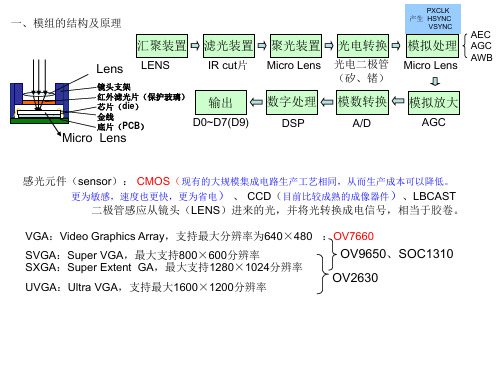
图像质量:sensor、LENS、图像信号处理器(电子信号图像数据压缩为JPEG) OV2630 S/N小 图像出现了很多的麻点,需降噪处理(DSP)
VDD VAA AGND DGND
DOVDD DGND
1)sensor的工作:VDD(1.8V)、D0VDD(2.5~3.3V)、 DGND、CLKIN(24~48MHz)、RESET、PWDN 2)与外部的通讯:I2C(SIO_C、SIO_D) ;SCCB (Serial camera control bus) 3)采集图像:VAA(2.45~2.8V)、AGND 3)图像输出: PXCLK:
LENS 的结构及重要技术参数:
IR:波长780nm~2.5um~50um~ 300um
LENS 检测的胶片pitch值、视场角、几何失真
f=EFL=5.31mm o=600mm 1 1 1 = o + f i i = o * f = 600 * 5.31 o-f 600 - 5.31
o
i
= 4.48 mm
像素(pixel):构成图片的最小单位,每个像素都拥有亮度(Y),色度(U/V) 就是二极管数量,像素增加,LENS必须增大。 如果一味增加像素,由于1个像素的面积变小,所受的光量变少,sensor 感光度变低,S/N(signal与noise)比也将变低。 解像度:dpi(dot per inch) 制造工艺决定,一般LCD显示器(96*96) 同象素的sensor :Micron(4.6*3.7mm 3.8um) <OV(4.13*3.28mm 3.18um) 1/3” ¼”
摄像头模组知识
系统组-揭应平20150914摄像头模组相关知识模组基本结构AF Type FF Type模组主要器件AF Type模组主要器件:1.Sensor (传感器)2.LENS(镜头)3.VCM(音圈马达)4.IR & BG(滤光片)5.Bracket (底座)6.PCB (基板)FF Type模组主要器件:1.Sensor (传感器)2.LENS(镜头)3.Holder(底座)4.IR & BG(滤光片)5.PCB (基板)CSP Sensor模组相关工艺注:每个厂家的生产流程都各不同,基本的流程都是差不多;CSP 的工艺就相对COB 简单很多;COB Sensor模组相关工艺注:上面是基本的COB 工艺流程,各个工艺会每个厂家都有一定的区别;当然某些客户对测试会有一些特殊要求;例如在调焦前及检测后做一次震动,用来确认Particle 的问题;一般Sensor分类按制造工艺来分为CSP & COBCSP: Chip scale package(Sensor底部锡球通过锡膏与FPC开窗PAD接触连接)COB: Chip On Board (通过胶使Sensor与FPC相接触)1.Sensor的分类1.Sensor的分类CSP & COB优缺点对比CSP:优点:模组工艺简单,Particle容易控制;生产良率高;缺点:在成像区表面有Cover Glass层,增加了Sensor本身成本,成本高; COB: Chip On Board优点:1.产品光透性相对较好;2.模组厚度相对较低,对LENS后要求小;缺点:1.模组厂商设备投入大;2.制程复杂,良率较难控制(尤其是POD & POG);2.LENS 相关参数2.LENS 相关参数EFL介紹EFL為Effective Focal Length的縮寫,意思是有效焦距。
有效焦距就是透鏡系統中心到成像焦點的距離(即光學系統中心到成像面的距離)。
光学模组知识点总结
光学模组知识点总结光学模组是一个涵盖了光学元件、光学设计、光学加工、光电传感、光电信号处理、光电系统集成等多个方面知识的综合性领域。
在高科技领域中,光学模组应用广泛,涉及到光通信、光学显微镜、摄影镜头、激光雷达、激光加工等多个领域。
光学模组的知识点非常丰富,本文将对光学模组相关的知识点进行总结。
一、光学元件1.透镜透镜是光学系统中最基本的元件,根据其曲率可以分为凸透镜和凹透镜。
透镜的焦距和倍率是透镜最基本的参数,可以通过透镜的焦距计算出像距、物距和像高等参数。
2.棱镜棱镜是将光线折射、反射、漫射的光学元件,可以将白光分散成不同的波长光谱,也可以进行全反射和漫反射。
3.反射镜反射镜是一种通过反射来调整光线方向的光学元件,包括平面反射镜、球面镜、椭圆面镜等。
反射镜在望远镜、激光器等光学系统中广泛应用。
4.偏振片偏振片是可以选择特定方向光线通过的光学元件,可以将自然光变成偏振光,也可以将偏振光转换为自然光。
5.滤光片滤光片可以选择性地透过一定波长的光,也可以选择性地吸收或反射一定波长的光。
6.衍射光栅衍射光栅是一种可以通过衍射作用进行光谱分析的光学元件,通常用于分光仪、光谱仪等光学系统。
7.光学薄膜光学薄膜是一种可以改变光通过特定波长的透射率、反射率的光学元件,广泛应用于镜片、滤光片、透镜等光学元件。
8.光学元件的表面处理光学元件的表面处理包括抛光、镀膜、防刮花、防反射等工艺,是保证光学元件质量的关键。
二、光学设计1.光学系统的设计原理光学系统的设计原理主要包括光线追迹、光束传输、光学系统的布局、颗粒光学等多个方面的知识。
2.光学系统的优化光学系统的优化包括了光学系统的结构优化、元件参数的优化、光学系统的工作模式优化等多个方面的内容。
3.光学系统的仿真光学系统的仿真是借助计算机进行光学系统的模拟和分析,可以通过仿真对光学系统进行性能评估和改进。
4.光学系统的成像原理光学系统的成像原理是光学设计的核心内容,包括了像差、色差、成像质量、分辨率、变视角等多个方面的知识。
摄像头模组原理
摄像头模组原理
摄像头模组利用光学传感器、图像处理器、数据接口等技术实现图像的捕捉和传输。
其原理如下:
1. 光学传感器:摄像头模组通常采用CMOS或CCD传感器来捕捉光线,将光信号转化为电信号。
CMOS和CCD传感器在结构和工作原理上略有差异,但都能够将光线的强度和颜色信息转化为电压信号。
2. 图像处理器:摄像头模组中的图像处理器负责将原始的电信号转化为可显示和存储的图像。
它使用算法和技术来对电信号进行放大、滤波、去噪、增强等处理,以获得更清晰、更准确的图像。
3. 数据接口:摄像头模组通过数据接口将处理后的图像传输给其他设备,如计算机、手机等。
常见的数据接口包括USB、HDMI、MIPI等。
数据接口的选择取决于摄像头模组的应用场景和设备的兼容性要求。
摄像头模组的工作原理是通过光学传感器捕捉图像的电信号,经过图像处理器的加工处理,最后通过数据接口传输到其他设备。
这一过程中,各个组件协同工作,实现对图像的采集、处理和传输。
摄像头模组知识范文
摄像头模组知识范文
摄像头模组由摄像头本身和模组组成,摄像头本身是指捕捉图像的机
械部件,而模组则是摄像头配件中最重要的一个。
它是摄像头、拍摄图像、把图像传输到电脑等操作的控制器,其包括多个部件,如光学元件、模拟
电路板、图像采集板、处理板、驱动芯片、校准程序、图像处理算法等。
1.捕捉图像:摄像头模组能够捕捉、清晰地显示摄影内容,用户可以
在拍摄时调整摄像头方向或者焦距。
2.图像传输:摄像头模组能够将拍摄的画面实时传输到电脑或者其他
设备,从而实时观看、记录、分享或者处理拍摄的画面。
3.调整参数:摄像头模组能够与设备连接,调整参数,如曝光补偿、
白平衡调整等,从而达到满足拍摄要求的品质。
4.录像:摄像头模组可以实现不断录制视频,从而记录节目和文件,
实现电视录像。
手机摄像模组知识简介

手机摄像模组知识简介CCM名词解释手机摄像模组又称为CCM英文为:Contraction/Chip Camera Module 中文为:紧凑型/单芯片型摄像模组手机摄像模组CCM结构手机摄像头模组由镜头lens holder)、传感器Sensor简介图像传感器(Image Sensor)图像传感器(Image Sensor)是一种半导体芯片,其表面包含有几十万到几百万的光电二极管。
光电二极管受到光照射时,就会产生电荷,通过模数转换器芯片转换成数字信号。
目前有两种:一种是CCD(Charge Coupled Device电荷藕合器件);另一种是CMOS(Complementary Metal-Oxide Semiconductor互补金属氧化物导体)。
舜宇光电Sensor简介Wafer PLCC DIPCLCC CSPImage Sensor的应用范围CCD CMOS区别CMOS器件产生的图像质量相比CCD来说要低一些。
到目前为止,市面上绝大多数的消费级别的数码相机都使用CCD作为感应器;CMOS则作为中低端产品应用于一些摄像头上。
CMOS影像传感器的优点之一是电源消耗量比CCD低,CCD为提供优异的影像品质,付出代价即是较高的电源消耗量,为使电荷传输顺畅,噪声降低,需由高压差改善传输效果。
但CMOS影像传感器将每一画素的电荷转换成电压,读取前便将其放大,利用3.3V的电源即可驱动,电源消耗量比CCD低。
CMOS影像传感器的另一优点,是与周边电路的整合性高,可将ADC与信号处理器整合在一起,使体积大幅缩小,例如,CMOS影像传感器只需一组电源,CCD却需三或四组电源,由于CCD的ADC与信号处理器的制程与CMOS不同,要缩小CCD套件的体积很困难。
CMOS SENSOR的主要分类按像素分1、CIF: Common Intermediate Format 通用中间格式352*288 (10万)2、VGA: Video Graphics Array 视频图形阵列640*480 (30万)3、SXGA: Super Extended Graphics Array高级扩展图形阵列1200*1024 (1.3Mega)4、UXGA: Ultra Extended Graphics Array超级扩展图形阵列1600*1200 (2Mega)5、QXGA: Quadruple XGA 四倍的XGA2048*1536 (3Mega)6、QSXGA: Quadruple SXGA四倍的SXGA2560*2048 (5Mega)CMOS SENSOR的主要分类CMOS SENSOR的主要分类按光学尺寸分指感光区的对角线长度一般有:1/2”1/3”1/4”1/5”1/7”1/11”等CMOS SENSOR的主要分类按输出接口分Traditional parallel digital video port (标准并行数字视频接口)MIPI(移动工业处理器接口)SMIA(标准移动图像处理体系结构)舜宇光电1、OmniVision---豪威2、Aptina(Micron)---美光3、ST---意法半导体4、SamSung---三星5、Sony---索尼6、SiliconFile7、MagaChip8、SET9、PixelPlus10、Hynix11、Galaxycore(格科微)SENSOR工作原理景物通过镜头(Lens)生成的光学图像,投射到图像传感器(Sensor)感光面上,将光信号转为电信号。
摄像头模组(CCM)介绍:
摄像头模组(CCM)介绍:⼀、摄像头模组(CCM)介绍:1、camera特写摄像头模组,全称CameraCompact Module,以下简写为CCM,是影像捕捉⾄关重要的电⼦器件。
先来张特写,各种样⼦的都有,不过我前⼀段时间调试那个有点丑。
2、摄像头⼯作原理、camera的组成各组件的作⽤想完全的去理解,还得去深⼊,如果是代码我们就逐步分析,模组的话我们就把它分解开来,看他到底是怎么⼯作的。
看下它是有那些部分构成的,如下图所⽰:(1)、⼯作原理:物体通过镜头(lens)聚集的光,通过CMOS或CCD集成电路,把光信号转换成电信号,再经过内部图像处理器(ISP)转换成数字图像信号输出到数字信号处理器(DSP)加⼯处理,转换成标准的GRB、YUV等格式图像信号。
(2)、CCM 包含四⼤件:镜头(lens)、传感器(sensor)、软板(FPC)、图像处理芯⽚(DSP)。
决定⼀个摄像头好坏的重要部件是:镜头(lens)、图像处理芯⽚(DSP)、传感器(sensor)。
CCM的关键技术为:光学设计技术、⾮球⾯镜制作技术、光学镀膜技术。
镜头(lens)是相机的灵魂,镜头(lens)对成像的效果有很重要的作⽤,是利⽤透镜的折射原理,景物光线通过镜头,在聚焦平⾯上形成清晰的影像,通过感光材料CMOS或CCD感光器记录景物的影像。
镜头⼚家主要集中在台湾、⽇本和韩国,镜头这种光学技术含量⾼的产业有⽐较⾼的门槛,业内⽐较知名的企业如富⼠精机、柯尼卡美能达、⼤⽴光、Enplas等传感器(sensor)是CCM的核⼼模块,⽬前⼴泛使⽤的有两种:⼀种是⼴泛使⽤的CCD(电荷藕合)元件;另⼀种是CMOS(互补⾦属氧化物导体)器件。
电荷藕合器件图像传感器CCD(Charge Coupled Device),它使⽤⼀种⾼感光度的半导体材料制成,能把光线转变成电荷,通过模数转换器芯⽚转换成数字信号。
CCD由许多感光单位组成,通常以百万像素为单位。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一 光学基本知识及常见问题 二 光学制造 三 光学设计与光电产品开发
实用文档
一 光学术语
1 焦距(Focal Length或EFFL) 2 相对孔径(FNo.)
3 视场角(FOV) 4 镜头总长和光学总长(TTL) 5 机械后焦(MBF)和光学后焦 6 最佳对焦距离和景深 7 光学畸变(Opt distortion)和TV畸变(TV
distortion
实用文档
8 相对照度(Relative illumination) 9 最大出射角(Max chief angle) 10 IR Filter(滤光片) 11 MTF 12 镜头生产周期
13 镜头常用镜片材质 14 关于镜头和SENSOR的匹配 15 关于低高度镜头及镀膜的作用
理论上的超焦距距离不一定是该镜头的最佳调焦距离. 如果在最佳调焦距离调好焦以后, 再确认远景和近景 时, 镜头的解像力理论上都会下降, 故为达到一定的景深范围一定要选择合适的调焦距离.
实用文档
7 光学畸变(Opt distortion)和TV畸变(TV distortion)
畸变是指光学系统对物体所成的像相对于物体本身而言的 失真程度.光学畸变是指光学理论上计算所得到的变形度, TV畸变则是指实际拍摄图像时的变形程度, DC相机的标准 是测量芯片(Sensor)短边处的变形.一般来说光学畸变不等 于TV畸变, 特别是对具有校正能力的芯片来说. 畸变通常 分两种: 桶形畸变和枕形畸变. (示意图如下页)
实用文档
实用文档
B I m a g e P l a n e I R F
E ( 机 械 后 焦 ) 光 学 后 焦 ( 2 ) 光 学 后 焦 ( 1 )
6 最佳对焦距离和景深
景深反映了一个光学系统对空间物体成像清晰程度.而最 佳对焦距离是指一个光学系统景深最佳时的调焦距离, 这 里讲的最佳在实际应用时其实是相对而言的. 对焦距离取 决于使用者(客户或消费者)希望光学系统所能拍摄的距离 范围.
实用文档实用文档源自B I m a g e P l a n e I R F
光 学 总 长 C ± 0 . 1 ( a t i n f i n i t e , a i r )
5 机械后焦(MBF)和光学后焦
机械后焦是指从镜头机械后端面到像面的距离, 而光学后焦 是指从镜头最后一个镜片的最后一面到像面的距离. 它们 两者的差别随不同光学系统的不同而不同. 同时在光学行 业内对光学后焦也有两种表达, 联合光电目前采用光学后 焦1的描述. (示意图如下页)
实用文档
10 IR Filter(滤光片)
它主要用于调整整个系统的色彩还原性. 它往往随着芯片 的不同而使用不同的波长范围, 因为芯片对不同波长范围 的光线其感应灵敏度不一样.
一般说来, 要求镜头的IRF截止波长要同SENSOR所要 求的IRF截止波长相匹配, 否则可能会出现色彩还原性不 好. 不过色彩还原性或偏色问题也同模组的软件调整有关 系.
实用文档
11 MTF
它从一定程度上反映了一个光学系统对物体成像的分辨能力. 一般来说, MTF越高,其分辨力越强, MTF越低, 其分辨力越低. 由于MTF也只是从一个角度来评价镜头的分辨率,也存在一些 不足, 故在目前的生产中, 大多数还是以逆投影检查分辨为 主.
(示意图如下页)
实用文档
关于MTF的计算:
实用文档
9 最大出射角(Max chief angle)
它是指光学系统(镜头)所能拍摄范围内的光(主光线)在通过 光学系统(镜头)后到达像面(如SENSOR)时同像面所成的最 大夹角. 出射角越小设计越困难,相应的成本也会增加, 镜 头的总长也会相对变长. 一般说来, 要求镜头的CRA要小于SENSOR所要求的CRA, 但考虑到SENSOR本身对CRA的要求也存在一定的公差, 所 以只要角度相差不大即可.
实用文档
3 视场角(FOV)
一个光学系统所能成像的角度范围. 角度越大, 则这个光 学系统所能成像的范围越宽, 反之则越窄. 在实际产品当 中, 又有光学FOV和机械FOV之分, 光学FOV是指SENSOR或胶 片所能真正成像的有效FOV范围, 机械FOV一般大于光学FOV, 这是有其他考虑和用途, 比如说需要用机械FOV来参考设计 Module或者手机盖的通光孔直径大小. (示意图如下页)
实用文档
实用文档
Mec.hFOV6.25° ? .072
B Im ageP lane IR F
4 镜头总长和光学总长(TTL)
光学总长是指从系统第一个镜片表面到像面的距离; 而镜头 总长是指最前端表面(一般指Barrel表面)到像面(例如 Sensor表面)的距离.一般来说, 镜头太长或太短其设计都 会变得困难, 制造时对工艺要求较高. (示意图如下页, UNION的镜头规格书中图面所标注的E即 为机械总长)
实用文档
枕形畸变
桶形畸变
TV DIST=
(B+C)/2-A (B+C)/2
X100(%)
实用文档
8 相对照度(Relative illumination又简写为 RI):
它是指一个光学系统所成像在边缘处的亮度相对于中心区域 亮度的比值, 无单位. 在实际测量的结果中, 它不仅同光 学系统本身有关, 也同所使用的感光片(SENSOR)有关. 同 样的镜头用于不同的芯片可能会有不同的测量结果. 关于镜头亮度的均匀性: 从光学设计理论上讲, 镜 头周边照度相对中心一定会有下降.一般要求光学设计应 达到50%以上.
实用文档
1 焦距(Focal Length或EFFL)
是指一个光学系统从起像方主面到焦点间的距离, 它 反映了一个光学系统对物体聚焦的能力. (示意图如下页)
实用文档
镜头
实用文档
像方主面
焦点
焦距
2 相对孔径(FNo.):
一个光学系统成像亮度指标, 一般简称F数(如传统相机上所 标识), 在同样的光强度照射下, 其数值越小, 则像面越亮, 其数值越大, 则像面越暗. 对于一般的成像光学系统来说, F2.8-3.2就比较合适, 如果要求F数越小, 则设计越难, 结 构越复杂, 制造成本就越高.