果实采摘机器人运动控制系统设计毕业设计
采摘机器人控制系统设计研究
采摘机器人控制系统设计研究摘要:在不断深化创新教育的背景下,培养学生的创新实践能力迫在眉睫。
笔者利用高职教师现有的科研项目,通过项目化的专业实践与双创教育的有机结合,设计了一款多台采摘机器人的控制系统,并完成了控制系统的程序设计。
仿真结果表明,该控制系统可以实现集散控制系统(DCS)对多台采摘机器人的实时运动参数监测与精确控制,解决多台采摘机器人同时作业时相互干扰、效率低的问题,同时优化采摘端的传感器、PLC控制器、通信模块RS-485等硬件设计。
教改实践证明,项目化实践和双创教育的结合,既有利于培养学生的工程实践能力,又有利于提高学生的创新意识。
关键词:专业教育;双创教育;DCS;PLC;采摘机器人近年来,国家新一轮供给侧结构性改革的战略提出,其主要目的是以创新驱动发展,在此背景下,2017年2月,教育部提出“新工科”的概念,此举是为了提高高等教育中工科的创新能力。
新工科专业的内核是以新兴的产业为核心,将智能制造、人工智能等用于传统的工科专业改革。
同时,对于高职的工科专业来说,需要专业教育与双创教育融合培养,这样才能培养出实践能力更强、创新能力更强、具有国际竞争力的高端技能人才。
在此背景下,培养学生的创新实践能力迫在眉睫,以学生导师现有的研究方向为指引,提高学生自主创新的工程能力,在理论上设计一款基于集散控制系统(DCS)的采摘机器人,通过此项目的设计培养学生的专业创新工程能力。
1设计思路集散控制系统(DCS)在现代自动化控制系统中有着重要的地位,对于多控制对象有着良好的控制精度和效果。
此次控制的对象为果蔬采摘机器人,解决采摘机器人只能单体控制不能进行多个采摘机器人综合控制的问题。
多个采摘机器人在同时运作过程中易出现相互干扰的现象,导致多个采摘机器人协同作业效率低、对目标识别不精确等。
针对此种现象,采用集散控制系统(DCS)作为多个采摘机器人的控制核心,同时在外部加入PLC技术、传感器技术,对多个采摘机器人进行控制和运动参数监测,并保证控制系统与外部设备数据的传输,最终达到多个采摘机器人按控制要求同时动作的目的[1]。
毕业设计(论文)-果实采摘机械手的设计与仿真
and simulation analysis of the mechanism. According to the results of simulation and
1.3 国内研究成果及现状 .......................................................................................... 65
1.4 主要研究的内容 .................................................................................................. 65
果实采摘机械手的设计与仿真
摘要:果实采摘工作具有较强的复杂性和较低的自动化程度,目前国内水果的采
摘工作主要靠手工完成。21 世纪是农用机械化向智能自动化机械过渡的关键时期,
工业智能自动化对现代农业发展规模化、多样化和精确化十分重要。本文针对小
型柑橘进行采摘机械手的设计,实现果实的全程自动化采摘。
本文通过对果实采摘机械手的采摘环境和采摘特点进行分析,提出一种六自由
manipulator, and puts forwards to a six-degree-of- freedom small citrus picking series
manipulator. Through the design of three kinds of end executor mechanical structure,
毕业设计(论文)-苹果采摘机的设计(全套图纸)

届毕业设计苹果采摘机的设计学生姓名:学号:所属专业:学院:班级:指导老师:日期:机械电气化工程学院制前言苹果原产欧洲中部、东南部,中亚西亚以及中国新疆。
苹果(Apple),是常见的水果之一。
苹果树属于蔷薇科,落叶乔木,叶椭圆形,有锯齿。
其果实球形,味甜,口感爽脆,且富含丰富的营养,是世界四大水果之冠。
苹果通常为红色,不过也有黄色和绿色。
苹果是一种低热量食物,每100克只产生60千卡热量。
苹果中营养成份可溶性大,易被人体吸收,故有“活水”之称,其有利于溶解硫元素,使皮肤润滑柔嫩。
中国是世界上最大的苹果生产国和消费国,苹果种植面积和产量均占世界总量的40%以上,在世界苹果产业中占有重要地位。
苹果消费市场主要为鲜果和加工制品,鲜食的比例高达90%,加工制品仅占10%左右。
为保证苹果的品质,适时采摘是我国苹果产业的重中之重。
采摘工作量繁重与劳动力的缺乏使得适时采摘变得越来越困难。
全套图纸加153893706目录1引言-------------------------------------------------------------------------------------------------------------------------------------------------- - 2 -1.1题来源及研究的目的和意义 -------------------------------------------------------------------------------------------------------- - 2 -1.2本课题国内外研究现状--------------------------------------------------------------------------------------------------------------- - 2 -1.3本课题需要重点研究的关键的问题及解决的思路 --------------------------------------------------------------------------- - 4 -1.4完成本课题需要的工作条件及解决的办法 ------------------------------------------------------------------------------------- - 5 -1.5 方案及进度计划------------------------------------------------------------------------------------------------------------------------ - 5 -2.机械的总体设计------------------------------------------------------------------------------------------------------------------------------ - 5 -2.1苹果采摘机工作流程 ------------------------------------------------------------------------------------------------------------------ - 6 -2.2机械手臂设计---------------------------------------------------------------------------------------------------------------------------- - 8 -3.苹果采摘机械动力控制机构的设计 ---------------------------------------------------------------------------------------------- - 12 -3.1输送机构传动方式 ------------------------------------------------------------------------------------------------------------------- - 12 -3.2V带传动的失效形式及设计准则-------------------------------------------------------------------------------------------------- - 12 -3.3V带传动设计步骤和传动参数选择 ---------------------------------------------------------------------------------------------- - 12 -3.4齿轮箱齿轮结构----------------------------------------------------------------------------------------------------------------------- - 13 -4. 苹果采摘机械行走机构的选择 --------------------------------------------------------------------------------------------------- - 17 -4.1行走机构 -------------------------------------------------------------------------------------------------------------------------------- - 18 -5.苹果采摘机输送装置的选择 --------------------------------------------------------------------------------------------------------- - 18 -5.1带式输送机 ----------------------------------------------------------------------------------------------------------------------------- - 18 -5.2 装筐输送机构 ------------------------------------------------------------------------------------------------------------------------- - 18 -6.部位仿真模拟分析 ------------------------------------------------------------------------------------------------------------------------ - 19 - 总结 -------------------------------------------------------------------------------------------------------------------------- 错误!未定义书签。
毕业设计(论文)-多臂采摘机器人的初步设计采摘手的设计(全套图纸)
多臂采摘机器人的初步设计——采摘手的设计1.绪论1.1研究内容及意义果蔬采摘是农业生产链中最耗时耗力的一个环节,其成本高、季节性强、需要大量劳动力高强度的工作。
但是由于工业生产的迅速发展分流了大量农业劳动力以及人口老龄化加剧等原因,使得能够从事农业生产的劳动力越来越少,单靠人工劳作已经不能满足现有的需要。
随着计算机图像处理技术和各种智能控制理论的发展,使采用机器人采摘果蔬成为可能。
果蔬采摘机器人是一类针对水果和蔬菜, 可以通过编程来完成采摘等相关作业任务的具有感知能力的自动化机械收获系统, 是集机械、电子、信息、智能技术、计算机科学、农业和生物等学科于一体的交叉边缘性科学, 需要涉及机械结构、视觉图像处理、机器人运动学动力学、传感器技术、控制技术以及计算信息处理等多方面学科领域知识。
采摘机器人将在解决劳动力不足、降低工人劳动强度、提高工人劳动舒适性、减轻农业化肥和农药对人体的危害、提高采摘果蔬的质量、降低采摘成本、提高劳动生产率、保证果蔬的适时采收、提高产品的国际竞争力等方面具有很大潜力。
国际上, 一些以日本和美国为代表的发达国家,已经从20世纪80年代开始研究采摘机器人,并取得了一些成果。
而我国在该领域中的研究还处于起步阶段,因此我们必须加快对采摘机器人的研究脚步以早日赶超国际水平,使其为我国农业的生产和发展做出重大贡献。
全套图纸,加1538937061.2研究现状果蔬采摘机器人的研究开始于20 世纪60 年代的美国( 1968 年),采用的收获方式主要是机械震摇式和气动震摇式。
其缺点是果实易损、效率不高,特别是无法进行选择性的收获,在采摘柔软、新鲜的果蔬方面还存在很大的局限性。
但在此后,随着电子技术和计算机技术的发展,特别是工业机器人技术、计算机图像处理技术和人工智能技术的日益成熟,采摘机器人的研究和开发技术得到了快速的发展。
1.2.1国外研究现状在日本、美国等发达国家,农业人口较少。
随着农业生产向规模化、多样化、精确化的方向迈进,劳动力不足的现象越来越明显。
多足行走自动摘果机器人的设计
多足行走自动摘果机器人的设计摘要:鉴于菠萝的生长特性和地形环境,以及考虑到人工采摘的安全性与效率,设计了一个可控制其行走和采摘的多足机器人,该机构操作简单,安全性高,采摘效率快。
工作时,采摘员控制机器人对菠萝柄进行剪断,从而顺利采摘菠萝。
所以要对该多足行走自动摘果机器人进行总体设计,运用软件对机械臂及其他机械结构进行了虚拟建模,并对关键部件进行了校核,验证了关键零部件的结构设计的合理性。
此设计能够有效地解决大部分果农采摘菠萝时的难题,促进了菠萝产业的发展。
关键词:菠萝;采摘;机器人;多足;机械臂0 引言菠萝,又称凤梨,为著名热带水果,为多年生水果,乃我国四大名果之一。
菠萝果实品质优良,营养丰富,含有大量的果糖,葡萄糖,维生素B、C,磷,柠檬酸和蛋白酶等物质,能分解蛋白质、帮助消化,有一定的利尿作用,对肾炎和高血压者有益,对支气管炎也有辅助疗效。
菠萝有极好的经济价值,菠萝叶中含有一种优质的叶脉纤维―――菠萝麻,是优质的纺织原料,具有很高的经济价值。
1 菠萝采摘的现状分析菠萝植株的叶片呈螺旋形排列,簇生于莲上,菠萝成熟时,叶片变为革质,呈剑状,有些菠萝品种的叶片边缘还会长出剌来,易扎伤人的手。
目前,绝大多数菠萝的采摘是人工进行的,每到菠萝的成熟期,采摘菠萝的劳动强度大大加大,这是菠萝产业发展的重大难题。
随着科学技术的快速发展,,机械化产业的发展日新月异,所以实现水果产业的机械化迫不及待且有着重大的意义。
水果的收获是水果生产的重要部分,但是每到采摘时期,艰辛的采摘工作,过低的采摘效率,造成果实由于过于成熟而无法适时收获,这让果农们吃尽了苦头。
菠萝的?收就是一个很典型的实例。
为促进水果的发展,对水果采摘机械化自动化的研宄显得格外重要。
2 总体结构及工作流程设计2.1 多足行走自动摘果机器人总体结构设计该摘果机器人由多足行走装置、机械臂、齿轮摘果剪刀、wifi视频远程遥控装置及中央控制计算机组成。
2.2 系统工作流程1)手机打开wifi连接该机器人发出的wifi信号,打开软件获取机器人摘果机械臂上的摄像头传送来的视频和遥控按钮页面。
果园采摘机器人课程设计

果园采摘机器人课程设计一、课程目标知识目标:1. 学生能理解果园采摘机器人基本的结构和工作原理;2. 学生能够掌握机器人编程中的基础命令和操作流程;3. 学生能够描述果园采摘机器人在现代农业中的应用及其优势。
技能目标:1. 学生能够通过小组合作,设计并实施一个简单的采摘机器人程序;2. 学生能够运用所学的编程知识对采摘机器人进行基本的控制;3. 学生能够通过实际操作,分析并解决采摘过程中遇到的问题。
情感态度价值观目标:1. 培养学生对现代农业科技的兴趣,激发他们学习科学技术的热情;2. 培养学生团队协作精神,增强沟通与表达能力;3. 培养学生关注农业发展,认识到科技对提高农业生产力的作用,增强社会责任感。
本课程针对学生年级特点,结合课本内容,注重实践操作和团队合作,旨在提高学生对现代农业科技的认识,培养创新意识和实际操作能力。
通过具体的学习成果分解,使学生能够在实践中掌握知识,提高技能,培养正确的情感态度价值观。
二、教学内容本章节教学内容主要包括果园采摘机器人的基础知识、编程操作以及实际应用。
1. 基础知识:- 机器人的定义、分类及其在农业领域的应用;- 果园采摘机器人的结构组成、工作原理;- 机器人传感器及其作用。
2. 编程操作:- 编程软件的安装与使用;- 基础编程命令和语法;- 机器人控制程序的设计与调试。
3. 实际应用:- 果园采摘机器人的操作方法;- 采摘过程中的问题分析与解决;- 机器人采摘与人工采摘的对比分析。
教学内容依据课本章节进行安排,结合课程目标,确保教学内容科学性和系统性。
在教学过程中,教师将引导学生学习基础知识,通过实例分析掌握编程操作,并在实践中体验果园采摘机器人的实际应用。
教学内容将分阶段进行,逐步提高学生理解和运用知识的能力。
三、教学方法本章节将采用以下多样化的教学方法,以激发学生的学习兴趣和主动性,提高教学效果:1. 讲授法:- 教师通过生动的语言和形象的表达,讲解果园采摘机器人的基础知识,使学生系统了解课程内容;- 结合课本内容,通过多媒体课件展示果园采摘机器人的结构、原理和应用,增强学生的直观感受。
水果采摘器结构设计-毕业论文

毕业设计(论文)题目:水果采摘器结构设计摘要本论文主要对一种水果采摘器进行了初步的设计。
这个装置主要有以下几部分组成。
包括机械手装置、升降装置、控制系统、以及驱动系统等部分,在搜集整合了大量资料后,确定以添加了保护装置的机械手装置以及实现整个水果采摘器自动化为创新亮点的水果采摘器,首先对各主要零件进行结构和参数设计、工作原理的分析、力学和运动学的分析以及误差的分析等,然后把设计好的机械手部分与已经选择好的升降装置、控制系统和驱动装置以及连接装置的三维零件图完成装配,所完成的装配图就是水果采摘器的基本模型,最后利用力学软件对水果采摘器装置进行力学分析和通过市场调查完成经济性分析,经过分析得出本次设计合理有效。
关键词:水果采摘器,机械手,自动化AbstractThis paper mainly designs a fruit picker. This device mainly consists of the following parts. It includes manipulator device, lifting device, control system and driving system. After collecting and integrating a large amount of data, it is determined that the fruit picker with added protective device and automation of the whole fruit picker are the innovation highlights. Firstly, the main parts are divided into structure and parameter design, working principle analysis, mechanics and kinematics. Analysis and error analysis, and then the designed part of the manipulator is assembled with the three-dimensional part drawings of the selected lifting device, control system, drive device and connection device. The completed assembly drawings are the basic model of fruit harvester. Finally, the mechanical analysis of fruit harvester device is carried out by mechanical software and the economic analysis is completed by market investigation. After analysis, the design is reasonable and effective.Key words:Fruit picker, manipulator, automation第4 页目录前言 (1)1、绪论 (2)1.1研究的目的和意义 (2)1.1.1研究目的 (2)1.1.2研究意义 (2)1.2国内外研究状况 (2)1.2.1国外研究状况 (2)1.2.2 国内研究状况 (2) (3)2、水果采摘器的方案设计 (4)2.1水果采摘器关键技术问题以及解决方案 (4)2.1.1关键技术问题 (4)2.1.2解决方案 (4)2.2水果采摘器方案设计 (4)2.2.1两种方案的比较 (4)2.2.2总体设计方案的选取和水果采摘器组成部分 (6)3、水果采摘器主要结构零部件设计 (8)3.1仿生机械手的原理分析 (8)3.1.1采摘方式的选择: (8)3.1.2分离方式的选择 (10)3.2仿生机械手的总体设计 (11)图3.4机械手结构图 (11)3.3仿生机械手手指的设计 (11)3.3.1手指材料的选择 (11)3.3.2手指的结构设计 (12)3.4升降系统的设计 (14)3.4.1升降台设计背景 (14)3.4.2升降平台整体方案与布局 (14)3.4.3升降平台结构设计 (15)3.5控制系统、驱动系统、连接装置的选择 (16)3.5.1控制系统的选择 (16)3.5.2视觉识别系统部分 (17)3.5.3传感系统部分 (18)3.5.4控制中心部分 (19)3.6水果采摘机器行走系统的确定 (20)3.6.1驱动方式的选择 (20)3.6.2行走方式的选择 (20)4、水果采摘器的受力分析和经济分析 (20)4.1水果采摘器受力分析 (20)4.1.1手指的工作原理、受力分析相关计算 (20)4.2水果采摘器的经济性分析 (26)4.2.1关于水果采摘器市场现状的分析 (26)4.2.2市场调查及分析 (26)5、水果采摘器建模 (27)5.1重要零件的虚拟设计装配 (27)5.1.1建模的一般步骤 (27)5.1.2水果采摘器主要手指零件的建模 (27)结论 (29)致谢 (30)参考文献 (31)第4 页前言中国农村中有非常多的小规模的果园,这些果园中的大多数采用的采摘方式为人工采摘,这样不仅效率低下而且比较危险,因此设计一种优良的水果采摘器具有重大意义。
采摘机器人运动控制系统的设计与实现
采摘机器人运动控制系统的设计与实现关键词:采摘机器人;电机驱动;避障1 引言随着电子技术和计算机技术的发展,智能机器人已在许多领域得到日益广泛的应用。
在农业生产中,由于作业对象的复杂、多样,以及当前我国正面临人口老年化的趋势[1],使得新型农业机械——农业机器人的开发具有巨大经济效益和广阔的市场前景,符合社会发展的需求[2]。
采摘机器人是针对水果和蔬菜,可以通过编程来完成这些作物的采摘、转运、打包等相关作业任务的具有感知能力的自动化机械收获系统,是集机械、电子、信息、智能技术、计算机科学、农业和生物等学科于一体的交叉边缘性科学[3]。
采摘机器人是基于人工采摘果实作业中耗时、费力等因素而应运而生的智能农业装备[4]。
运动控制系统作为采摘机器人控制系统中不可或缺的部分为机器人实现连续、稳定的采摘工作提供了必要的保证。
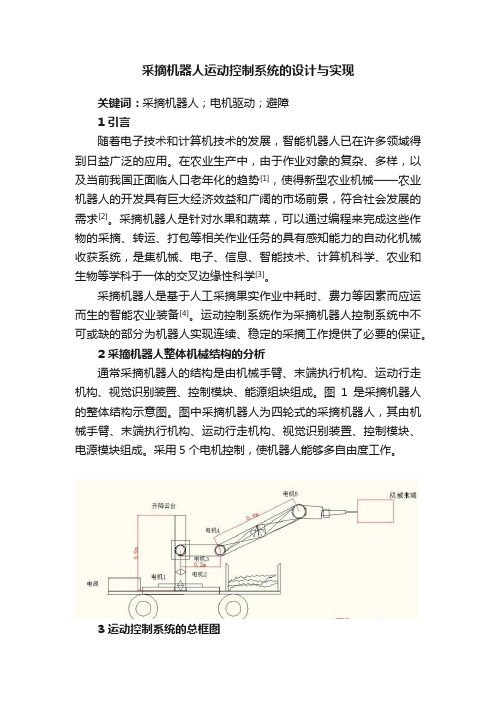
2 采摘机器人整体机械结构的分析通常采摘机器人的结构是由机械手臂、末端执行机构、运动行走机构、视觉识别装置、控制模块、能源组块组成。
图1是采摘机器人的整体结构示意图。
图中采摘机器人为四轮式的采摘机器人,其由机械手臂、末端执行机构、运动行走机构、视觉识别装置、控制模块、电源模块组成。
采用5个电机控制,使机器人能够多自由度工作。
3 运动控制系统的总框图鉴于采摘机器人的本职工作是顺利完成采摘工作,运动控制系统处于辅助的地位而并不需要像抢险救灾机器人等机器人精于路况处理的智能机器人那样处理复杂的实时环境问题。
同时为了提高运动系统的稳定性能,避免设备的不必要的效率消耗以及降低投入成本和达到灵活的避险要求。
设计的运动控制系统的总框图如图2所示。
4 运动控制系统硬件设计4.1 主控器模块设计根据设计要求,控制器主要用于各种信号的处理、控制算法实现、底盘电动机的控制和声光报警等,控制器选择ATMEL公司生产的AT89C52单片机作为系统控制器。
4.2 电机控制模块电路设计本设计中电机的控制方式是PWM波控制方式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
学校代码:11059学号:**********Hefei University毕业设计(论文)BACH ELOR DISSERTATI ON论文题目:番茄采摘机器人运动控制系统的设计与实现学位类别:工学学士年级专业(班级):作者姓名:导师姓名:完成时间:番茄采摘机器人运动控制系统的设计与实现中文摘要本文从机器人机械结构入手,对番茄采摘机器入的运动控制系统进行了研究。
首先,参照国内外的采摘机器人的研究现状,分析了番茄采摘机器人机械结构并完成运动控制系统的机械结构设计。
其次,对运动控制系统进行了分析和设计。
运动控制系统的分析与设计部分立足于采摘机器人的工作环境,并结合采摘机器人自身运动方面的需求和其它机械部分的需求来设计。
主要包括:电源模块、电机控制模块、电机驱动模块、显示模块等。
第三,对采摘机器人的传感器部分进行了分析并对运动控制系统的避障部分进行了设计。
采摘机器人的传感器选择依据的是番茄采摘机器人的工作环境以及目前市场上所具有的几种常见传感器的性能、价格和能完成的功能进行比较选择,最终设计出避障系统。
最后,通过仿真验证了运动控制系统设计的准确性,实现了避障功能。
关键词:机械结构;避障;传感器;运动控制Tomato Harvesting Robot Motion Control System DesignAnd ImplementationABSTRACTThis paper starts from the mechanical structure of robot to analyse and design the motion control system of Tomato Picking Robot .Firstly, with reference to the new research of the domestic and foreign picking robot, it analyses the tomato picking robot mechanical structure and design mechanical structure of the motion control system .Secondly, analysis and designs the motion control system. It is also based on the picking robot working environment, and combined the damand of picking robot self motion and the coordination of other mechanical to design. Mainly it comprises a power supply module, motor control module and display module and so on.Thirdly, The sensor of the picking robot is analyzed and designing the obstacle avoidance of the motion control system , mainly including: the selection of sensor, obstacle avoidance module, alarm module designing. Picking robot sensor selection is based on the tomato picking robot working environment as well as the current market, which has several common sensor performance, price and can complete the function chosen for comparison. At last, it designs the obstacle avoidance system.Finally, the accuracy of the motion control system in this design is verified correctly by simulation. The obstacle avoidance function can realizing in the simulation .KEY WORD: mechanical structure; obstacle avoidance; sensors; motion control毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日目录中文摘要 (I)ABSTRACT ......................................................................................................................................................... I I 第一章前言 (1)1.1研究背景与意义 (1)1.2果实采摘机器人研究现状 (1)1.2.1果实采摘机器人国内外发展现状 (1)1.2.2果实采摘机器人关键技术及其发展现状 (3)1.3研究内容与结果 (4)第二章机械结构的分析与设计 (5)2.1果实采摘机器人整体机械结构的分析 (5)2.2运动控制系统机械结构的设计 (6)2.2.1运动控制系统的机械结构分析 (6)2.2.2运动控制系统机械结构的设计 (6)2.3运动控制系统车体载荷分析与执行器的选择 (7)2.3.1 执行器选择依据 (7)2.3.2 执行机构电机的介绍 (10)第三章运动控制系统硬件部分设计 (12)3.1总体方案设计思路 (12)3.1.1主控制器模块 (12)3.1.2电源模块 (12)3.1.3电机控制模块 (13)3.1.4电机驱动模块 (13)3.1.5显示模块 (14)3.1.6报警模块 (15)3.1.7传感器选择与避障系统设计 (15)3.2运动控制系统硬件设计 (17)3.2.1主控器模块设计 (17)3.2.2电机控制模块电路设计 (18)3.2.3 报警模块电路设计 (20)3.2.4显示模块电路设计 (20)3.2.5超声波模块电路设计 (21)第四章运动控制系统软件设计 (23)4.1运动控制系统总程序流程图 (23)4.2超声波测距模块 (24)4.3避障模块 (25)4.4电机控制模块 (26)4.5显示模块 (27)第五章系统仿真 (27)结束语 (30)参考文献 (31)致谢 (33)附件 (34)第一章前言1.1研究背景与意义随着电子技术和计算机技术的发展,智能机器人已在许多领域得到日益广泛的应用。
在农业生产中,由于作业对象的复杂、多样,以及当前我国正面临人口老年化的趋势[1],使得新型农业机械——农业机器人的开发具有巨大经济效益和广阔的市场前景,符合社会发展的需求。
番茄采摘机器人是基于人工采摘果实作业中耗时、费力等因素而应运而生的智能农业装备。
运动控制系统作为采摘机器人控制系统中不可或缺的部分为机器人实现连续、稳定的采摘工作提供了必要的保证。
国际上,日本、美国等发达国家,已经从20世纪80年代开始研究采摘机器人,并取得很多成果。
从1983年的第一台西红柿采摘机器人在美国诞生以来,采摘机器人的研究和发展已经经历了近30年[2],但我国在该领域中的研究还处于起步阶段,因此我们必须加快对采摘机器人的研究脚步以早日赶超国际水平,使其为我国农业的生产和发展做出重大。
1.2果实采摘机器人研究现状1.2.1果实采摘机器人国内外发展现状采摘机器人是针对水果和蔬菜,可以通过编程来完成这些作物的采摘、转运、打包等相关作业任务的具有感知能力的自动化机械收获系统,是集机械、电子、信息、智能技术、计算机科学、农业和生物等学科于一体的交叉边缘性科学[3]。
近30年来,采摘机器人的发展可谓是日新月异,日本和欧美等国家相继立项研究采摘苹果、柑桔、西红柿、西瓜和葡萄等智能机器人。
和国内相比国外一直处于技术前沿。
(1)经典的番茄采摘机器人是日本Kondo N等人研制的番茄采摘机器人。
其结构由机械手臂、末端执行机构、运动行走机构、视觉识别装置、控制模块、能源组块组成。
图1.1、图1.2是其发明的7自由度采摘机器人的机械结构和实物图。
采用具有冗余度的7自由度机械手是为了能够灵活避开障碍物。
此款机器人的采摘准确率为70%,速度为15s/个果实[4]。
(2)美国研究人员在美国航空航天局资助下研制成番茄采摘机器人能在草和叶子之间确定西红柿的位置,挑选出已成熟的西红柿并进行采摘,其采摘准确度可达到85%~95%[5]。
(3)日本一家机器人公司研制出草莓采摘机器人,如图1.1所示。
其内置有能够感应色彩的摄像头,可以准确分辨出草莓和绿叶,利用事先设定的色彩值,再配合独特的机械结构,它就可以判断出草莓的成熟度,并将符合要求的草莓采摘下来,速度达到10s/个[6]。