工程力学第3章 工程构件的静力平衡问题
工程力学(静力学与材料力学)-3-静力学平衡问题

z
O
y
∑ Fx = 0, ∑ Fy = 0, ∑ MO= 0
其中矩心O 其中矩心O为力系作用面内的任 意点. 意点. 通常将上述平衡方程中的第1 两式称为力的平衡方程; 通常将上述平衡方程中的第1,2两式称为力的平衡方程; 式称为力矩平衡方程. 第3式称为力矩平衡方程. 上述平衡方程表明,平面力系平衡的必要与充分条件是: 上述平衡方程表明,平面力系平衡的必要与充分条件是: 力系中所有的力在直角坐标系Oxy的各坐标轴上的投影的代 力系中所有的力在直角坐标系 Oxy的各坐标轴上的投影的代 数和以及所有的力对任意点之矩的代数和同时等于零. 数和以及所有的力对任意点之矩的代数和同时等于零.
平面力系的平衡条件与平衡方程
平面一般力系的平衡条件与平衡方程-例题 1 平面一般力系的平衡条件与平衡方程-
解: 1.分析受力 建立Oxy坐标系 建立Oxy坐标系. 坐标系. A处约束力分量为FAx和FAy ;钢 处约束力分量为F 索的拉力为F 索的拉力为FTB. 因为要求电动机处于任意位 置时的约束力, 所以假设力F 置时的约束力 , 所以假设力 FW 作 用在坐标为x 于是, 用在坐标为 x 处 . 于是 , 可以画出 吊车大梁AB的受力图 的受力图. 吊车大梁AB的受力图. 在吊车大梁AB 的受力图中 在吊车大梁 AB的受力图中 , 的受力图中, Fax , FAy 和 FTB 均为未知约束力与 已知的主动力F 已知的主动力FW和FQ组成平面力 因此,应用平面力系的3 系.因此,应用平面力系的3个平 衡方程可以求出全部3 衡方程可以求出全部3个未知约束 力.
平面力系的平衡条件与平衡方程
平面一般力系的平衡条件与平衡方程
例题1 例题1
悬臂式吊车结构中AB为吊车大梁 悬臂式吊车结构中AB为吊车大梁, 为吊车大梁, BC 为钢索 , A , 处为固定铰链支座 , BC为钢索 为钢索, 处为固定铰链支座, B 处为铰链约束 . 已知起重电动电动 处为铰链约束. 与重物的总重力为F 机 E 与重物的总重力为 FP( 因为两滑轮 之间的距离很小, 之间的距离很小 , FP 可视为集中力作 用在大梁上) 梁的重力为F 用在大梁上),梁的重力为FQ.已知角 30 度θ=30. 求:1. 电动机处于任意位置时, 电动机处于任意位置时, 钢索BC 所受的力和支座 处的约束力; 所受的力和支座A 钢索 BC所受的力和支座A处的约束力 ; 2. 分析电动机处于 什么位置时,钢索受力的最大, 什么位置时 , 钢索受力的最大 , 并确 定其数值. 定其数值.
第3章工程构件的静力学平衡问题
FAx、FAy和FTB均为未知约束力,与已知
的主动力P和W组成平面力系。因此,应
用平面力系的3个平衡方程可以求出全部
3个未知约束力。
14
3.1.1 例题3-1 悬臂式吊车
= 0 - × - × +T × sin=0
2
× + ×
2
= 0
= 0
=1
= 0
简写为
= 0
=1
= 0
= 0
=1
平面力系平衡的必要与充分条件是:力系中所有的力在直角坐标系Oxy的各
坐标轴上的投影的代数和以及所有的力对任意点之矩的代数和同时等于零。
大连大学
12
3.1.1 例题3-1 悬臂式吊车
3
大连大学
25
3.1 平面力系的平衡条件与平衡方程——
3.1.2 平面一般力系平衡方程的其他形式
大连大学
26
3.1.2 平面一般力系平衡方程的其他形式
可以将一个或两个力平衡方程用力矩平衡方程代替,这样就可以得到平面
力系平衡方程的其他形式。
一般形式
大连大学
二矩式
三矩式
= 0
= 0
关于平衡的重要概念:整体平衡,局部必然平衡
大连大学
4
第3章 工程构件的静力学平衡问题
关于平衡的重要概念:整体平衡,局部必然平衡
FR1 ´
FRAx
FRAy
大连大学
5
第3章 工程构件的静力学平衡问题
▪ 3.1 平面力系的平衡条件与平衡方程
▪ 3.2 简单的刚体系统平衡问题
第3章 工程构件的静力学平衡

3.4 结论与讨论
坐标系和力矩中心的选择 关于受力分析的重要性 求解刚体系统平衡问题时注意的几个方面 摩擦角与自锁的概念 空间力系平衡条件与平衡方程简述 1、力对轴之矩 2、空间力系的平衡方程
2011-9-19
28
3.4.1关于坐标系和力矩中心的选择
平面力系:力矩中心尽量选在两个或多个未 知力的交点上,可暂时不解这些未知量; 坐标系中坐标轴的取向应尽量与多数未知 力相垂直。可使其在坐标轴上的投影为零, 可减少平衡方程中未知力的数目。 平衡方程有三种形式,独立的平衡方程只有 三个。所以,平面力系平衡方程的三种形式 是等价的。可以用其中的平衡方程可以对所 得结果的正确性进行验证。
例3-3:图示之刚架,由立柱AB和横梁BC 组成,B处为刚性节点。刚架在A处为固定铰 链支座;C处为辊轴支座;受力如图所示。若 图中FP和l 均为已知,求A、C两处的约束力。
l B C
FP
l
A
2011-9-19 9
3.1 平面力系的平衡条件与平衡方程-例3
例3-4:图示的简单结构中,半 径为r的四分之一圆弧杆AB 与折杆 BDC在B处用铰链连接,A、C两处 均为固定铰链支座,折杆BDC上承 受力偶矩为M的力偶作用,力偶的 作用面与结构平面重合。图中l=2r。 若 r、M均为已知。试求:A、C两 处的约束力。
2011-9-19 23
3.3 考虑摩擦时的平衡问题
摩擦:滑动摩擦和滚动摩擦 滑动摩擦定律: 静摩擦力: 最大静摩擦力:与正压力成正 比,其方向与相对滑动摩擦 趋势的方向相反,与接触面 积的大小无关。即
Fmax = f s FN
f s 称为静摩擦因数.
2011-9-19 24
3.3.2 考虑摩擦时的平衡问题
《工程力学(工程静力学与材料力学)(第3版)》习题解答:第3章 力系的平衡
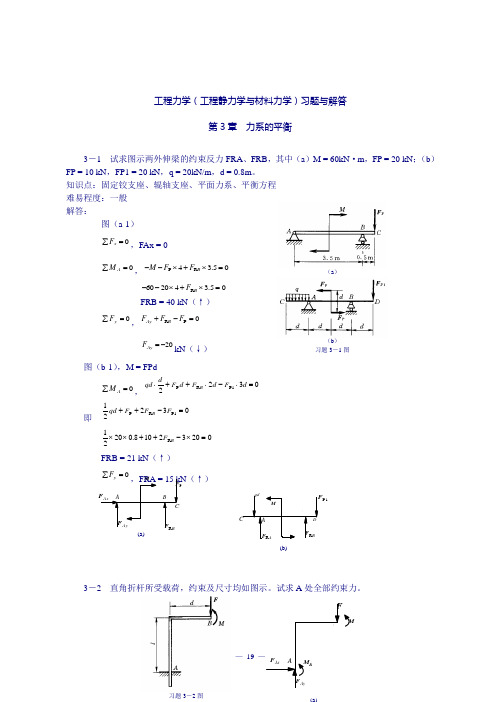
工程力学(工程静力学与材料力学)习题与解答第3章 力系的平衡3-1 试求图示两外伸梁的约束反力FRA 、FRB ,其中(a )M = 60kN ·m ,FP = 20 kN ;(b )FP = 10 kN ,FP1 = 20 kN ,q = 20kN/m ,d = 0.8m 。
知识点:固定铰支座、辊轴支座、平面力系、平衡方程 难易程度:一般 解答:图(a-1) 0=∑x F ,FAx = 00=∑A M ,05.34R P =⨯+⨯--B F F M 05.342060R =⨯+⨯--B F FRB = 40 kN (↑)=∑y F ,0P R =-+F F F B Ay20-=Ay F kN (↓)图(b-1),M = FPd 0=∑A M ,03221P R P =⋅-⋅++⋅d F d F d F dqd B即 032211P R P =-++F F F qd B 02032108.02021R =⨯-++⨯⨯B FFRB = 21 kN (↑)=∑y F ,FRA = 15 kN (↑)3-2 直角折杆所受载荷,约束及尺寸均如图示。
试求A 处全部约束力。
A MB Ay F B R F CAx F PF(a) M A B B R F A R F P 1F C qdBD(b)(a )(b ) 习题3-1图FMB习题3-3图sF W A F ABF BF AN F(a)知识点:固定端约束、平面力系、平衡方程 难易程度:一般 解答: 图(a ): 0=∑x F ,0=Ax F=∑y F ,=Ay F (↑)0=∑A M ,0=-+Fd M M AM Fd M A -=3-3 图示拖车重W = 20kN ,汽车对它的牵引力FS = 10 kN 。
试求拖车匀速直线行驶时,车轮A 、B 对地面的正压力。
知识点:固定端约束、平面力系、平衡方程 难易程度:一般解答: 图(a ):0)(=∑F A M 08.214.1NB S =⨯+⨯-⨯-F F W6.13NB =F kN=∑y F ,4.6NA =F kN3-4 图示起重机ABC 具有铅垂转动轴AB ,起重机重W = 3.5kN ,重心在D 。
第3章工程构件静力学平衡问题优秀课件

为 和 ,活塞气体总压力为P。求压板受到滚轮
的压力有多大?
3.1 汇交力系的平衡条件和方程 -例题
解:作用在活塞上的压力通过销钉A推动杆AB,AD, 使滚轮B,D压紧压板,故可首以销钉A为研究对象,再取 取B或D为研究对象。
3.1 汇交力系的平衡条件和方程 -例题
Xi 0 , F B C F Ac B3 o 0 s T 1 c4 o 5 s 0 (1)
Yi 0 , F As B 3 i n 0 T 1 s4 i n 5 T 2 0 (2)
T1 T2 G
(3)
由式(1)(2)(3)解得:
3.1 汇交力系的平衡条件和方程 -例题
FABG (1sis3 ni4 n 05 )5.1k 2N
解得:
FNAFNB62N5
3.2 力偶系的平衡条件和平衡方程 -例题
例题 3-4 已知: 结构受力如图所示, 图中M, r均为已知,且 l = 2r. 求: 画出AB和BDC杆的受
力图;并求A, C处的约束力. 解:
1. 取AB杆为研究对象;
AB杆为二力杆,受 力如图。
2. 取BDC杆,
B 处受力的方位可
例3-3 如图所示的减速箱的输入轴 Ⅰ上受到一主动力偶的作用,力偶 矩的大小为 M112N5m,输出轴 Ⅱ上受到一阻力偶作用,力偶 矩的大小为 M250N 0m;轴Ⅰ和 轴Ⅱ互相平行,减速箱的重 量不计,并于A,B处用螺栓和 支承面固联。求A,B处所受 铅直约束力。(设螺栓无 预紧力)
3.2 力偶系的平衡条件和平衡方程 -例题
F B C F Ac B3 o 0 s G c4 o 5 s 5 .4 k9 N
由于FAB和FBC均为正值,说明受力途中假定的各力 的指向正确,即AB杆受拉,BC杆受压。
工程力学第三章静力平衡问题

平面一般力系平衡方程还可表达为下列二种形式:
M
Fx A(F )
0
0
M B (F ) 0
M M
A B
(F (F
) )
0 0
MC (F ) 0
二力矩式
三力矩式
(AB不垂直于x轴) (A、B、C三点不共线)
注意:平衡方程中,投影轴和矩心可任意选取,可 写出无数个平衡方程。但只要满足了其中一组,其 余方程均应自动满足,故独立平衡方程只有三个。
矩心取在二未知力交点A 解处:,1力)矩画方整程体中受只力有图一。个未 知量F注C,意可B直C为接二求力解杆。。 2)取坐标,列平衡方程。
Fx=FAx-FCcos30=0
Fy=FAy+FCsin30-F-Fq=0
MA(F)=FCL/2-1.5F-FqL/2=0
FC
y
C
Fq=2q=1 kN
FAy
x
FAx 30
26
讨论:判断下述分析的正误。
FACy FAy
FACx
2a
M
3a
P
F
aA
MA
FAyFAx
FAx
B
B FABy
FABx
C
CP
A
FAx FAy
P
A
FFABAyy
A
FFAABxxFFAACyy
FACxx
FAx =F ; FAy =P ;
MA = M ?
MA = M+Fa-2Pa
固定铰的约束力作用于销钉上。 多杆用同一销钉连接,讨论某杆时, 须考虑各杆与销钉间作用的不同。
5
平面力系的平衡条件
平面一般力系处于平衡,充分和必要条件为力系
《工程力学》工程构件的静力学平衡问题

3.2 简单的刚体系统平衡问题
➢刚体系统静定与静不定的概念 ➢刚体系统的平衡问题的特点与解法
18/62
3.2 简单的刚体系统平衡问题
----刚体系统静定与静不定的概念
作用在刚体上未知力的个数正好等于独立的平衡方程个数, 应用平衡方程,可以解出全部未知量,这类问题称为静定问题。 相应的结构称为静定结构。
l
M=0
M
=
A
5 2
ql
2
11/62
3.1 平面力系的平衡条件与平衡方程
平衡方程的其他形式——二矩式
Fx=0或 Fy=0 M A(F)=0 M B (F)=0
非平衡力系
F
A
B
x
注意:A、B两点连线不能垂直于x(或y)轴
12/62
3.1 平面力系的平衡条件与平衡方程
平衡方程的其他形式——三矩式
2/62
关于平衡的重要概念:整体平衡,局部必然平衡
整体
整体
对于刚体----由二个或二 对于变形体----单个物体,或者由二
个以上刚体组成的系统。 个以及二个以上物体组成的系统。
3/62
局部 对于刚体----组成系统 的单个刚体或几个刚体
组成的子系统。
局部 对于变形体组成物体
的任意一部分。
FR1 ´ FR1 ´
一力偶M的作用。已知F=ql,M=ql2;l为梁的长度。
试求固定端处的约束力。
10/62
3.1 平面力系的平衡条件与平衡方程
解:1.研究对象、受力图
2.均布载荷简化为集中力
3.建立平衡方程
ql
Fx=0 RAx=0
Fy=0 RAy ql F=0 RAy=2ql
工程力学中的静力平衡和动力平衡
工程力学中的静力平衡和动力平衡工程力学是应用力学原理解决工程实际问题的学科,其中静力平衡和动力平衡是基本概念。
静力平衡是指物体在静止状态下所处的力的平衡,而动力平衡则是指物体在运动状态下所处的力的平衡。
本文将就工程力学中的静力平衡和动力平衡进行探讨。
一、静力平衡静力平衡是工程力学中的一个重要概念,它是指物体处于静止状态下所受力的平衡。
在静力平衡的条件下,物体不会发生运动或旋转。
静力平衡的核心原理是力的平衡,即合力为零。
根据牛顿第一定律,当物体处于静止状态时,合外力为零。
这意味着物体所受的外力与其受到的内力相平衡。
为了满足静力平衡,必须满足以下两个条件:1. 合力为零:物体受到的所有外力的合力必须为零。
这意味着物体所受的各个力在空间中的向量和必须为零。
2. 转矩为零:物体受到的所有力对于物体某一点的合力矩必须为零。
这意味着物体所受的各个力在空间中的转矩和必须为零。
满足这两个条件,物体才能实现静力平衡。
在实际工程中,静力平衡的原理被广泛应用于桥梁、建筑物、机械设备等的设计和施工中。
二、动力平衡与静力平衡不同,动力平衡是指物体在运动状态下所受力的平衡。
在动力平衡的条件下,物体可能发生运动或旋转,但其没有加速度。
动力平衡的核心原理是力矩的平衡,即合外力矩为零。
根据牛顿第二定律,当物体处于动态平衡时,合外力矩为零。
这意味着物体所受的合外力矩与其惯性力矩相平衡。
为了满足动力平衡,必须满足以下两个条件:1. 合外力矩为零:物体受到的所有外力矩的合力必须为零。
这意味着物体所受的各个力矩在空间中的矢量和必须为零。
2. 合外力为零:物体受到的所有外力的合力必须为零。
这意味着物体所受的各个力在空间中的矢量和必须为零。
满足这两个条件,物体才能实现动力平衡。
在工程实践中,动力平衡的原理被广泛应用于机械设备、交通工具、飞行器等的设计和运行中。
三、静力平衡与动力平衡的区别1. 状态不同:静力平衡是指物体处于静止状态下的力平衡,而动力平衡是指物体处于运动状态下且没有加速度的力平衡。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
TSINGHUA UNIVERSITY
解: 1. 选择平衡对象 以解除约束后的ABC梁作为平 衡对象。
FAx FAy FB
2. 根据约束性质分析约束力 A处为固定铰链,有一个方向不 确定的约束力,这个约束力可以分 解为铅垂方向与水平方向的梁个分 力FAy和FAx ;B处为辊轴支座,有一 个铅垂方向的约束力,指向是未知 的,可以假设为向上的FB 。 3. 应用平衡方程确定未知力
第2类习题 简单刚体系统的平衡问题(1)
试求图示静定梁在A、B、C三处的全部约束力。已知d、q和M。 注意比较和讨论图a、b、c三梁的约束力。
TSINGHUA UNIVERSITY
思考问题
本例能不能先以系统整体 为平衡对象,然后再以AB 或BC为平衡对象?
2d
2d
怎样检验本例所得结果的 正确性?
第2类习题 简单刚体系统的平衡问题(1)
第1类习题 单个刚体的平衡问题
试求图示两外伸梁的约束反力FRA、FRB,其中(a)M = 60 kN· m,FP = 20 kN;(b)FP = 10 kN,FP1 = 20 kN,q = 20 kN/m,d = 0.8 m。
TSINGHUA UNIVERSITY
解: 3. 应用平衡方程确定未知力
第2类习题 简单刚体系统的平衡问题(1)
试求图示静定梁在A、B、C三处的全部约束力。已知d、q和M。 注意比较和讨论图a、b、c三梁的约束力。
TSINGHUA UNIVERSITY
解:讨论
d d d d
拆开之前能不能将均布载荷简化为作用在B点的集中 力?
2qd
第2类习题 简单刚体系统的平衡问题(2)
Fx 0 ,
M
FAx FAy FB
A
F Ax 0
0
M FP 4 FB 3 . 5 0
60 20 4 FB 3 . 5 0
FB = 40 kN(↑)
Fy 0
F A y F B FP 0
F Ay 20 kN
TSINGHUA UNIVERSITY
第1类习题 单个刚体的平衡问题
试求图示两外伸梁的约束反力FRA、FRB,其中(a)M = 60 kN· m,FP = 20 kN;(b)FP = 10 kN,FP1 = 20 kN,q = 20 kN/m,d = 0.8 m。
TSINGHUA UNIVERSITY
TSINGHUA UNIVERSITY
2d
q
2d
F Bx
B
F Ax A
MA
C
B
F By
F By
FRC
解: 1. 将系统从B处拆开,分别以AB和BC梁为平衡对象; 2. 根据约束的性质,确定AB和BC梁所受的约束力: A处为固定端约束,约束力和约束力偶分别为FAx、FAy和MA , 确定AB和BC梁所受的约束力; C处为辊轴支座,其约束力沿铅垂方向,假设向上FRC; B处为中间铰,有一个方向未知的约束力,可以分解为铅垂与 水平方向的两个分力,先假设BC上B处约束力FBx、FBy的方向;
TSINGHUA UNIVERSITY
解:图中所示的各梁,都是由 两个刚体组成的刚体系统。只考 虑整体平衡,无法确定全部未知 约束力,因而必须将系统拆开, 选择合适的平衡对象,才能确定 全部未知约束力。
第2类习题 简单刚体系统的平衡问题(1)
试求图示静定梁在A、B、C三处的全部约束力。已知d、q和M。 注意比较和讨论图a、b、c三梁的约束力。
第2类习题 简单刚体系统的平衡问题(1)
试求图示静定梁在A、B、C三处的全部约束力。已知d、q和M。 注意比较和讨论图a、b、c三梁的约束力。
TSINGHUA UNIVERSITY
q
F Bx
MA
A
B
F Bx
C
F By
F´Bx
' F By F By
F Ay
´
FRC
解:考察右边梁的平衡: ΣFx = 0,FBx = 0 ΣMB = 0, ΣFy = 0,
图示上部为小腿的骨架。通过附着在髋部A和膝盖骨B上的四头肌B C,使小腿抬起。膝盖骨 可在膝关节的软骨上自由滑动。四头肌进一步延伸,并与胫骨C相附着。小腿的力学模型示于 题图的下部。试求四头肌的拉力FT和股骨(铰)D受到的合力大小。小腿质量为3.2kg,质心为 G1,脚的质量为1.6kg,质心为G2。
试求图示静定梁在A、B、C三处的全部约束力。已知d、q和M。 注意比较和讨论图a、b、c三梁的约束力。
TSINGHUA UNIVERSITY
d
q
d
F Bx
d
d
F Bx
M
A
A
B
C
F By
F Ay
F By
'
FRC
1. 将系统从B处拆开,分别以AB和BC梁为平衡对象;
2. 根据约束的性质,确定AB和BC梁所受的约束力:
TSINGHUA UNIVERSITY
四头肌
解: 1. 以膝关节以下部分骨骼为平 衡对象 2. 分析受力 膝关节可以简化为铰链约束,因 而有一个方向未知的约束力,将其 分解为铅垂与水平方向的两个分力。
FT
θ
D
四头肌可以简化为类似于绳索的 柔性约束,其约束力为拉力FT。 G1、 G1 分别为小腿和脚的重量 属于主动力。
FB = 21 kN(↑) FAx FAy FB
M
B
0
5d 2 FP d FR A 2 d FP 1 d 0
qd
FA y= 15 kN(↑)
Fx 0
FAx 0
第1类习题 单个刚体的平衡问题
试求图示两外伸梁的约束反力FRA、FRB,其中(a)M = 60 kN· m,FP = 20 kN;(b)FP = 10 kN,FP1 = 20 kN,q = 20 kN/m,d = 0.8 m。
第1类习题 单个刚体的平衡问题
试求图示两外伸梁的约束反力FRA、FRB,其中(a)M = 60 kN· m,FP = 20 kN;(b)FP = 10 kN,FP1 = 20 kN,q = 20 kN/m,d = 0.8 m。
TSINGHUA UNIVERSITY
计算结果的校核
FAy
FB
M = M F
qd d 2 FRC 2d 0
FRC
qd 4
FBy
3 4
qd
考察左边梁的平衡: ΣFx = 0,FBy
7
qd
MA
4 3d FBy 2d qd 0 2
MA = 3qd 2。
G1 G 2
FT = 1006N
第2类习题 简单刚体系统的平衡问题(2)
图示上部为小腿的骨架。通过附着在髋部A和膝盖骨B上的四头肌B C,使小腿抬起。膝盖骨 可在膝关节的软骨上自由滑动。四头肌进一步延伸,并与胫骨C相附着。小腿的力学模型示于 题图的下部。试求四头肌的拉力FT和股骨(铰)D受到的合力大小。小腿质量为3.2kg,质心为 G1,脚的质量为1.6kg,质心为G2。
范钦珊教育与教学工作室
工程力学解题指南 (3)
2002年4月24日
返回总目录
工程静力学
第3章
TSINGHUA UNIVERSITY
工程构件的 静力学平衡问题
第1类习题 单个刚体的平衡问题
试求图示两外伸梁的约束反力FRA、FRB,其中(a)M = 60 kN· m,FP = 20 kN;(b)FP = 10 kN,FP1 = 20 kN,q = 20 kN/m,d = 0.8 m。
第2类习题 简单刚体系统的平衡问题(1)
试求图示静定梁在A、B、C三处的全部约束力。已知d、q和M。 注意比较和讨论图a、b、c三梁的约束力。
TSINGHUA UNIVERSITY
2d
q
2d
解: F
F´By
B
Ax
A
MA
F Bx
B
C
F´Bx
F By
F By
FRC
3. 应用作用与反作用定律,确定AB梁B处的约束力: 考察左边梁的平衡: 考察右边梁的平衡: ΣFx = 0,FAx = 0 ΣFx = 0,FBx = 0 ΣFy = 0,FAy = 2qd ΣMB = 0,FRC = 0 ΣMA = 0, ΣFy = 0,FBy = 0 M A 2qd d 0 MA = 2qd 2;
第1类习题 单个刚体的平衡问题
试求图示两外伸梁的约束反力FRA、FRB,其中(a)M = 60 kN· m,FP = 20 kN;(b)FP = 10 kN,FP1 = 20 kN,q = 20 kN/m,d = 0.8 m。
TSINGHUA UNIVERSITY
解:
qd
M
A
0
d 2
FP d F B 2 d FP1 3 d 0
B
P
0.5 FA 3.5 60 20 0.5 20 3.5 0
第1类习题 单个刚体的平衡问题
试求图示两外伸梁的约束反力FRA、FRB,其中(a)M = 60 kN· m,FP = 20 kN;(b)FP = 10 kN,FP1 = 20 kN,q = 20 kN/m,d = 0.8 m。
解: 1. 选择平衡对象 以解除约束后的ABC梁作为平 衡对象。
FAx FAy FB
2. 根据约束性质分析约束力 A处为固定铰链,有一个方向不 确定的约束力,这个约束力可以分 解为铅垂方向与水平方向的梁个分 力FAy和FAx ;B处为辊轴支座,有一 个铅垂方向的约束力,指向是未知 的,可以假设为向上的FB 。 3. 应用平衡方程确定未知力
A处为固定端约束,约束力和约束力偶分别为FAx、FAy和MA ,确定 AB和BC梁所受的约束力;