伺服电机计算
伺服电机额定电流计算公式

伺服电机额定电流计算公式伺服电机额定电流计算公式概述在控制系统中,伺服电机是常用的一种驱动设备。
为了保证电机在正常工作状态下的稳定性和安全性,需要根据其特性和额定参数进行电流的计算。
本文将介绍伺服电机额定电流的计算公式以及相关解释。
伺服电机额定电流计算公式伺服电机额定电流的计算公式可以通过以下几个参数和公式进行计算:1.需要了解的参数:–电机额定功率(P),单位为瓦(W)–电机额定电压(V),单位为伏特(V)–电机额定效率(η),单位为百分比(%)–电机额定功率因数(PF),无单位2.计算公式:–伺服电机额定电流(I)= P / (V * η * PF)举例说明假设有一个额定功率为1000瓦特、额定电压为220伏特、额定效率为85%、额定功率因数为的伺服电机。
根据上述公式,可以计算出该电机的额定电流:伺服电机额定电流(I)= 1000 / (220 * * ) ≈ 安培(A)因此,该伺服电机的额定电流约为安培。
总结通过伺服电机额定电流的计算公式,我们可以根据电机的额定功率、额定电压、额定效率以及额定功率因数来计算出电机的额定电流。
这个数值对于电机的选用和工作状态的稳定性有着重要的影响。
在实际应用中,我们可以根据具体的参数来计算出电机的额定电流,并根据计算结果来进行合理的选择和安装。
伺服电机额定电流计算公式(续)电机额定功率(P)伺服电机的额定功率是指在正常工作状态下,电机能够输出的最大功率。
通常,在选购电机时,我们会根据设备的需求来选择合适的额定功率。
电机额定电压(V)伺服电机的额定电压是指电机正常工作时所需的电压。
根据实际情况,我们可以选择适合电机的电压等级,以确保电机的正常运行。
电机额定效率(η)伺服电机的额定效率是指电机在额定负载下输出功率与输入功率之比,通常以百分比表示。
较高的额定效率意味着电机能够更有效地将输入电能转化为有用的输出功率。
电机额定功率因数(PF)伺服电机的功率因数是指输入功率和视在功率之间的关系,通常没有单位。
伺服电机的选型计算办法

伺服电机的选型计算办法一、确定负载惯量:负载惯量是指伺服电机需要驱动的负载系统的惯性矩阵。
负载的形状、质量、分布和转动部件的位置等都会影响到负载的惯性矩阵。
1.如果负载是刚体,惯性矩阵可以通过测量负载的质量和尺寸,并进行计算得到。
2.如果负载是连续变形的物体,可以通过将其分为多个刚体部分,分别计算惯性矩阵,再进行合成得到整个负载的惯性矩阵。
二、计算定格转矩和定格转速:1.根据应用的工作周期,计算出所需的平均定格转矩。
定格转矩是指电机在长时间运行情况下,能够稳定输出的转矩。
2.根据应用的工作周期和速度要求,计算出所需的平均定格转速。
定格转速是指电机能够稳定运行的最大转速。
三、选择电机型号:1.根据定格转矩和定格转速的要求,查找电机制造商提供的电机规格表,找到满足要求的电机型号。
2.选择电机型号时还需要考虑其他因素,如电机的功率、最大转矩、过载能力、加速度能力等。
根据具体应用的需求进行综合考虑,选取合适的电机型号。
四、校核选型:1.根据选择的电机型号,计算电机的部分负载转矩和转矩脉冲响应时间。
与应用要求进行比较,确保选型的合理性。
2.根据负载惯量和转矩要求,计算伺服电机的加速时间。
与应用的加速要求进行比较,确保选型的合理性。
3.根据电机的定格转矩和转速,计算电机的输出功率。
与应用的功率需求进行比较,确保选型的合理性。
五、其他因素考虑:除了上述的基本选型计算办法外,还需考虑其他因素,例如电机的可靠性、寿命、环境适应性、维护和保养成本等。
总结:伺服电机的选型计算是一个综合考虑电机的转矩、转速、功率和其他性能指标的过程。
根据负载的惯性矩阵、应用的工作周期和速度要求,选择合适的电机型号,并进行校核以确保选型的合理性。
同时,还需要考虑其他因素,如电机的可靠性、寿命和维护成本等。
以上是伺服电机选型计算的一般步骤,具体要根据具体的应用需求来选择,需要结合实际情况进行综合决策。
伺服电机选型计算

伺服电机选型计算
1.负载惯量计算
负载惯量是指负载的转动惯量,计算方式为质量乘以质心距离平方。
负载惯性大会对电机的加速度和精度要求产生一定的影响。
伺服电机需要
具备足够的能力来加速和控制负载。
负载惯量的计算公式为:
J=m*r^2
其中,J表示负载的转动惯量,m表示负载的质量,r表示负载的质
心距离。
根据实际情况确定负载的质量和质心距离,可以估算负载的转动惯量。
2.加速度计算
加速度是指负载达到一定速度所需的时间。
加速度较大可以提高生产
效率,但可能会引起震动和噪音。
确定合适的加速度需要根据应用需要进
行权衡。
加速度的计算公式为:
a=(ωf-ωi)/t
其中,a表示加速度,ωf表示最终速度,ωi表示初始速度,t表示
加速时间。
3.扭矩计算
扭矩是伺服电机提供的力矩,其大小决定了电机的最大负载能力。
根据应用需求可以计算出负载所需的最大扭矩。
扭矩的计算公式为:
T=J*α
其中,T表示所需的最大扭矩,J表示负载的转动惯量,α表示加速度。
4.功率计算
功率是指电机输出的机械功率,也是伺服电机选型的一个重要参数。
根据应用需求可以计算出对应负载的最大功率。
功率的计算公式为:
P=M*ω
其中,P表示功率,M表示扭矩,ω表示角速度。
5.速度计算
速度是指电机的转速,根据应用需求可以计算出所需的最大速度。
速度的计算公式为:
V=ω*r
其中,V表示速度,ω表示角速度,r表示负载的质心距离。
伺服电机计算大全
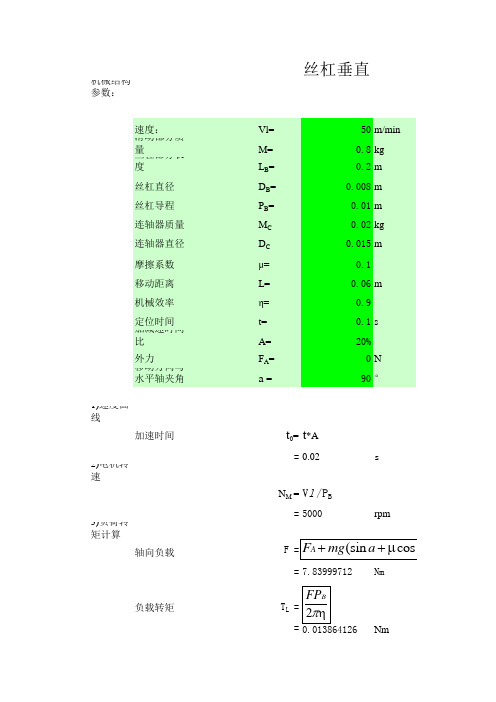
JB
=
32
LBDB 4
= 6.35357E-07 kgm2
JC=
1 mDC2 8
= 5.625E-07
kgm2
JL= JL+JB+JC
= 3.22427E-06 kgm2
2 Nm(Jm Jl)
TS=
60t1
= 0.105460145 Nm
TM= (TL+TS)*S
= 0.178986407 Nm
FPB TL = 2
= 0.013864126 Nm
4)克服惯 量的加速
直线运动平 台与负载惯
滚珠丝杠惯 量
连轴器惯量
总负荷惯量
启动转矩
5)必须转 矩
必须转矩
6)电机选
择
根据计算,
初步确定电
7)负荷与 电机惯量
8)负荷与 减当速负机荷惯与 电机惯量
JL = m( PB )2 2
= 2.02641E-06 kgm2
I1= 4.010287786
I2= 0.160411511
*
其他常数
*
G=
*
pi=
*
丝杠密度
ρ=
*
*
*
*
* * *
9.8 m/s 3.1416
7900 kg/m3
a cos a)
安全系数
S=
1.5
电机惯量
JM=
0.000000804 kgm2
减速机减速比
i=
5
机械结构 参数:
速滑度动:部分质 量丝杠部分长 度 丝杠直径 丝杠导程 连轴器质量 连轴器直径 摩擦系数 移动距离 机械效率 定加位减时速间时间 比 外力 移动方向与 水平轴夹角
伺服电机选型计算公式

伺服电机选型计算公式伺服电机选型计算公式是指通过一系列的计算公式来确定伺服电机的合适参数,以满足特定需求。
伺服电机选型的主要目标是确定伺服电机的额定转矩、额定电流、额定功率等参数,以及选择合适的伺服驱动器。
下面将介绍一些常用的伺服电机选型计算公式。
1.负载的转矩计算公式:负载的转矩是伺服电机选型的基础,通过计算负载的转矩,可以确定伺服电机的额定转矩。
负载的转矩可以通过以下公式计算:负载转矩=(负载力*负载半径)/(传动效率*减速比)2.伺服电机的额定转矩计算公式:伺服电机的额定转矩是指在额定转速下,电机能够提供的最大转矩。
额定转矩可以通过以下公式计算:额定转矩=(负载转矩+加速扭矩)/传动效率3.伺服电机的额定电流计算公式:伺服电机的额定电流是指在额定转矩下,电机所需的额定电流。
额定电流可以通过以下公式计算:额定电流=额定转矩*电流系数/额定转速4.伺服电机的额定功率计算公式:伺服电机的额定功率是指在额定转矩和额定转速下,电机所提供的对外功率。
额定功率可以通过以下公式计算:额定功率=额定转矩*额定转速/9.555.伺服驱动器的额定功率计算公式:伺服驱动器的额定功率是指驱动器所能提供的最大功率。
额定功率可以通过以下公式计算:额定功率=伺服电机的额定功率/驱动器的效率除了上述几个常用的伺服电机选型计算公式外,还需要考虑一些其他因素,例如:负载的加速时间、负载的惯性矩、伺服系统的控制精度等,这些因素都会对伺服电机的选型产生影响,需要综合考虑。
同时,还需要根据具体的应用环境和需求,选择合适的伺服电机和驱动器型号,以确保系统的性能和可靠性。
需要注意的是,伺服电机选型计算公式只是一个参考,实际选型过程中还需要考虑一系列的工程参数和实际情况,同时也需要借助一些专业的伺服电机选型软件,以更准确地确定伺服电机的参数。
伺服电机计算完整版
伺服电机计算完整版伺服电机是一种可以实现高精度运动控制的电机。
它采用了闭环控制系统,通过反馈信号不断调整输出,以实现对位置、速度和加速度的精确控制。
伺服电机在自动化控制、工业机械、机器人等领域有着广泛的应用。
伺服电机的运动控制可以通过数学模型来描述。
一般情况下,可以将伺服电机的运动控制建模为一个二阶系统。
在建立数学模型之前,需要了解一些关键参数,包括电机的转矩常数Kt、电机的动态阻尼比ζ、滤波器的角频率ωn以及PID控制器的增益参数Kp、Ki和Kd。
伺服电机的数学模型可以用以下差分方程来描述:Tm*(θm(k+1)-θm(k))/T=Kt*(Ti/R)*Vi(k)-Td*(θm(k)-θ(k))J*(θ(k+1)-2θm(k)+θ(k-1))/T^2=T*(θm(k+1)-θm(k))/T其中,Tm为电机的转矩,θm(k)为电机的角度,Vi(k)为控制输入,Ti和R分别为电机的转矩常数和电阻,Td为电机的动态阻尼比,J为负载的转动惯量,θ(k)为负载的角度,T为采样周期。
根据以上差分方程,可以推导得到伺服电机的传递函数:G(s)=(Kt*(Ti/R))/(J*s^2+(Td+J)*s+(Kt*(Ti/R)))可以根据传递函数来设计伺服电机的控制器。
一种常见的控制器设计方法是PID控制,它是通过对误差进行比例、积分和微分处理来调整输出。
PID控制器的输出可以表示为:U(s)=Kp*e(s)+Ki*1/s*e(s)+Kd*s*e(s)其中,U(s)为控制器的输出,Kp、Ki和Kd分别为比例、积分和微分增益参数,e(s)为误差信号,s为Laplace变换中的频率变量。
通过将传递函数和控制器的输出进行连接,可以得到整个系统的传递函数:T(s)=G(s)*U(s)=(Kt*(Ti/R))/(J*s^2+(Td+J)*s+(Kt*(Ti/R)))*(Kp*e(s)+Ki*1/s*e(s)+Kd*s*e(s))根据传递函数T(s),可以进行系统的频域和时域分析,以评估系统的稳定性和动态性能。
伺服电机极限转矩计算公式
伺服电机极限转矩计算公式引言。
伺服电机是一种能够精确控制位置、速度和加速度的电机,广泛应用于工业自动化、机器人、数控设备等领域。
在实际应用中,我们经常需要计算伺服电机的极限转矩,以确保电机能够正常工作并满足工作要求。
本文将介绍伺服电机极限转矩的计算公式及其相关知识。
伺服电机极限转矩的定义。
伺服电机的极限转矩是指电机在特定工作条件下所能提供的最大转矩。
在实际应用中,我们需要考虑伺服电机在运行过程中所受到的负载、惯性等因素,以确保电机能够正常工作并保证系统的稳定性和安全性。
伺服电机极限转矩的计算公式。
伺服电机的极限转矩可以通过以下公式进行计算:Tmax = J α + Tl。
其中,Tmax表示伺服电机的极限转矩,单位为N·m;J表示负载的惯性矩,单位为kg·m²;α表示负载的角加速度,单位为rad/s²;Tl表示负载的静摩擦力和动摩擦力之和,单位为N·m。
在实际应用中,我们需要根据具体的工作条件和负载特性来确定负载的惯性矩、角加速度和摩擦力,然后通过上述公式计算伺服电机的极限转矩,以确保电机能够满足工作要求。
负载的惯性矩的计算。
负载的惯性矩是指负载对于旋转运动的惯性特性,可以通过以下公式进行计算:J = m r²。
其中,J表示负载的惯性矩,单位为kg·m²;m表示负载的质量,单位为kg;r表示负载的旋转半径,单位为m。
负载的角加速度的计算。
负载的角加速度是指负载在单位时间内的角速度变化量,可以通过以下公式进行计算:α = (ωf ωi) / t。
其中,α表示负载的角加速度,单位为rad/s²;ωf表示负载的最终角速度,单位为rad/s;ωi表示负载的初始角速度,单位为rad/s;t表示负载的加速时间,单位为s。
负载的摩擦力的计算。
负载的摩擦力是指负载在运动过程中所受到的摩擦阻力,可以通过实验测量或仿真计算来确定。
伺服电机的最大加速度计算

伺服电机的最大加速度计算
要计算伺服电机的最大加速度,需要考虑以下几个因素:
1.电机参数:伺服电机的参数包括电机转矩常数、电机惯量等。
这些
参数直接影响电机的加速度能力。
2.电机驱动器的选择:驱动器的性能特点包括最大加速度、最大速度等。
这些特性也影响伺服系统的最大加速度。
3.载荷特性:载荷质量、摩擦力等也会影响伺服系统的加速度。
下面介绍一些常见的方法来计算伺服电机的最大加速度:
方法一:根据牛顿第二定律
根据牛顿第二定律,加速度等于力和质量的比值。
所以可以通过计算
电机产生的最大转矩和负载的质量,来得到伺服电机的最大加速度。
加速度=最大转矩/负载质量
其中,最大转矩可以通过电机的参数手册或者实际测试获得,负载质
量可以通过称重或者其他方式得到。
方法二:根据电机转矩常数和电机惯量
加速度=转矩常数/惯量
这种方法只需要知道转矩常数和惯量,可以直接从电机参数手册获得。
方法三:根据伺服驱动器的最大加速度
可以通过查找驱动器的规格书来获取其最大加速度的数值。
需要注意的是,以上方法只是一些常见的计算伺服电机最大加速度的
方法,具体的计算方法还需根据具体的电机和应用来确定。
在实际设计中,考虑到实际情况和稳定性等因素,也需要对计算结果进行适当的修正。
此外,在设计伺服系统时还需要考虑到系统的其他因素,如最大速度、控制精度等,以综合评估伺服系统的性能和控制要求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
已知:
1)上位机发出脉冲能力为200Kp/S,200×1000/s,200×1000×60/min;
2)电机额定转速为3000R/ min,3000/60s;
3)伺服电机编码器分辨率是131072;
4)丝杆螺距是10mm;
求:
1、电机额定转速运行时的电子齿轮比?
2、如果电子齿轮比是1,伺服电机的转速?
3、生产时,设定指令脉冲当量,确定电子齿轮比?
解:
1、当上位机满额发出脉冲时,伺服恰好额定速度运行:
1)电机额定转速为3000r/ min,3000r/60s=50r/s;
2) 伺服电机编码器分辨率是131072;
3)电机额定转速时编码器输出检测反馈脉冲频率是131072×50r/s;;
4)上位机发出脉冲能力时发出的脉冲频率=200×1000/s;
5)当上位机满额发出脉冲时,伺服恰好额定速度运行,这时的电子齿轮比:
电子齿轮比=反馈脉冲频率/上位机满额发出脉冲频率
=(131072×50r/s)/ 200×1000/s
=6553600/200000
=3.2768
2、如果电子齿轮比是1:
1)上位机发出的1个脉冲=编码器输出检测反馈的1个脉冲:
2)上位机发出脉冲能力时发出的脉冲频率=200×1000/s;
3)伺服电机的转速是=200×1000/s×60/131072= 91.55 r/min
3、如果丝杆螺距是10mm,
1)要求上位机每发一个指令脉冲,工件移动0.001mm,即指令脉冲当量为0.001mm,也可以说指令脉冲单位为0.001mm:
2)如果伺服转一周,丝杆转一周,减速比是1;
3)丝杆转一周,上位机应该发出的指令脉冲为10mm/0.001mm=10000(个);
4)伺服转一周,编码器检测反馈脉冲为131072(个);
5)电子齿轮比=编码器检测反馈脉冲/上位机发出的指令脉冲=131072/10000=13.7012;
1、从以上计算,现在我们知道:
1)当上位机满额发出脉冲时,伺服恰好额定速度运行,
电子齿轮比=反馈脉冲频率/上位机满额发出脉冲频率=3.2768
2)如果电子齿轮比是1:伺服电机的转速是==91.55 r/min
3)丝杆螺距是10mm,指令脉冲当量为0.001mm,电子齿轮比=编码器检测反馈脉冲/上位机发出的指令脉冲=13.7012;
2、现在我们还想知道,丝杆螺距是10mm,指令脉冲当量为0.001mm,加工时电机额定速度运行时的电子齿轮比?
3、丝杆螺距是10mm,指令脉冲当量为0.001mm,加工时电机额定速度运行时的电子齿轮比?
1)丝杆螺距是10mm,指令脉冲当量为0.001mm,电子齿轮比=编码器检测反馈脉冲/上位机发出的指令脉冲=13.7012;
2)当上位机满额发出脉冲时,伺服恰好额定速度运行,电子齿轮比=反馈脉冲频率/上位机满额发出脉冲频率=3.2768
3)只有1)、2)的电子齿轮比相等时,才可以保证当上位机满额发出脉冲时,伺服恰好额定速度运行,丝杆螺距是10mm,指令脉冲当量为0.001mm;
4)如果我们让上位机,不工作在额定状态,只工作在1/(13.7012/3.2768)额定频率上,而电机工作在额定转速下,这时的电子齿轮比是
电子齿轮比=反馈脉冲频率/【上位机满额发出脉冲频率×1/(13.7012/3.2768)】 =3.2768×(13.7012/3.2768)
=13.7012
5)这样,我们得出:
a、让上位机,不工作在额定状态,只工作在1/(13.7012/3.2768)额定频率上;
b、而电机工作在额定转速下;
c、丝杆螺距是10mm(减速比等于),指令脉冲当量为0.001mm;
d、电子齿轮比是=13.7012
4、如果电子齿轮比是1,伺服电机的转速是=200×1000/s×60/131072= 91.55 r/min,怎么能使电子齿轮比=1时,电机转快一点呢?
1)只要将编码器的刻线数降低,即编码器一周的反馈脉冲缩小(分频),电机的转速就会提高;
2)我们只要将编码器的解析度131072缩小到131072/(3000/91.55);3)伺服电机的转速=200×1000/s×60/【131072/(3000/91.55)】
=(200×1000/s×60/131072)×(3000/91.55)
=3000r/min;
4)我们只要将编码器的解析度131072缩小到131072/(3000/91.55):编码器的解析度= 131072/(3000/91.55)≈ 131072的32分频= 4096 ;5)电子齿轮比=1时,编码器的解析度是4096时,电机的转速为额定转速3000转/分!
5、我主楼计算的三种数字(a、电机额定转速运行时的电子齿轮比?b、如果电子齿轮比是1,伺服电机的转速?c、生产时,设定指令脉冲当量,确定电子齿轮比?)是有关电子齿轮比的三中应用:
1)“b、如果电子齿轮比是1,伺服电机的转速?”,指明要提高电机运行速度的方法,就是对编码器的解析度分频;
2)“a、电机额定转速运行时的电子齿轮比?”,要伺服以额定转速,按指令脉冲当量运行,指明了如何调整确定上位机的发出的指令脉冲频率及电子齿轮比;
3)“c、生产时,设定指令脉冲当量,确定电子齿轮比?”是所有计算的基础;。