伺服电机与步进电机的工作原理和六大区别
伺服电机与步进电机的工作原理和六大区别
伺服电机与步进电机的工作原理和六大区别一、伺服电机的工作原理伺服电机是一种能够实现精确控制的电机,其工作原理主要通过反馈系统和控制算法来实现。
伺服电机内置编码器或传感器,可以实时监测电机的转速和位置,并将这些信息反馈给控制器。
控制器根据反馈信号调整电机的输出,使得电机能够按照设定的路径和速度运动。
这样,伺服电机可以在不同负载和速度条件下实现精确的位置控制。
二、步进电机的工作原理步进电机是一种数字控制电机,其工作原理是通过逐步地施加脉冲信号来驱动电机旋转。
每个脉冲信号会使步进电机按照固定的步距旋转一定角度。
步进电机不需要反馈系统,通过控制脉冲信号的频率和顺序,可以准确控制步进电机的转角和速度。
三、伺服电机与步进电机的区别1. 工作原理•伺服电机:通过反馈系统和控制算法实现精确位置控制。
•步进电机:通过逐步施加脉冲信号来驱动电机旋转。
2. 控制精度•伺服电机:具有更精确的位置控制能力,适合需要高精度控制的应用。
•步进电机:控制精度一般,适合一些简单的定位控制。
3. 反馈系统•伺服电机:需要配备反馈系统,可以实时监测电机位置和速度。
•步进电机:不需要反馈系统,控制简单。
4. 动态响应•伺服电机:具有较快的动态响应能力,适合高速运动和快速变速的应用。
•步进电机:动态响应速度较慢,不适合高速运动。
5. 成本•伺服电机:成本相对较高,适用于对精度和性能要求高的场合。
•步进电机:成本较低,适用于一些对控制要求不高的应用。
6. 使用场景•伺服电机:适用于需要高精度、高速度和高性能的自动化设备。
•步进电机:适用于一些简单的定位控制、打印机、CNC机床等领域。
综上所述,伺服电机和步进电机在工作原理、控制精度、反馈系统、动态响应、成本和使用场景等方面存在明显的区别,应根据具体需求来选择合适的电机类型。
伺服电机与步进电机的区别
伺服电机与步进电机的区别在自动控制系统中,使用电机作为驱动源十分普遍。
伺服电机(Servo Motor)和步进电机(Stepper Motor)常被使用于工业控制和机器人控制等领域。
虽然两种电机都可以用于控制机械的运动,但它们之间存在显著的差异。
本文将介绍伺服电机和步进电机的区别,以及它们的不同优劣势。
一、工作原理伺服电机和步进电机的工作原理不同。
伺服电机通过反馈控制来实现闭环控制。
伺服电机驱动器根据反馈传感器返回的信息(通常是位置、速度或加速度),根据与期望值的差异进行调整,从而更好地控制电机输出。
伺服电机的反馈控制可以使其在各种负载下快速响应,具有更高的精度。
步进电机基于开环控制,通过输入一个脉冲序列来控制旋转角度。
步进电机的转速和位置取决于控制器发出的脉冲数,一个脉冲会使电机转动一个特定的角度,电机的最大位置精度也取决于控制器脉冲的数量和频率。
二、工作范围伺服电机和步进电机的适用范围也不同。
伺服电机通常适用于精确的位置控制。
它们可以控制机械系统的位置和速度,并准确达到既定的目标。
伺服电机通常安装在需要更小运动误差的场合,如传送带、医疗设备和机器人等。
由于它们通常具有更快的响应速度和更精确的反馈系统,因此它们的性能比步进电机更好。
步进电机可以对转动进行高度精确的控制,因此它们适用于需要较简单位置控制的场合,如打印机、数码相机、自动门、自动售货机等。
步进电机的响应时间较长,因此它们不适用于需要高速响应的应用。
三、控制方式伺服电机和步进电机需要不同的控制方式。
伺服电机一般需要PWM的方式来进行速度和位置控制,需要反馈环来进行控制保证。
使用PWM的控制方式可以调节输入的电流和电压,以实现更好的控制。
相对而言,步进电机的控制比较简单,在控制时只需要向其输入脉冲即可。
四、使用场合伺服电机和步进电机一般应用于不同的场合。
伺服电机一般应用于精密度要求比较高的机械和自动化设备中,如医疗设备、印刷机、自动化生产线、数控机床等。
步进电机与伺服电机区别

步进电机与伺服电机区别步进电机和伺服电机是现代工业中常见的两种电动执行元件,它们在自动化控制系统中起着重要作用。
虽然它们都是电动机,但在工作原理、应用领域和性能特点上有着明显的区别。
本文将从几个方面对步进电机和伺服电机进行比较,以帮助读者更好地理解它们之间的差异。
1. 工作原理步进电机:步进电机是一种将电脉冲转变为机械位移的电机,它通过将电流施加到定位磁极上来产生转矩,并通过轴向的步进角来控制位置。
步进电机在不需要传感器反馈的情况下可以实现精确的位置控制。
伺服电机:伺服电机是一种通过与位置或速度传感器配合的反馈系统来控制输出位置、速度或转矩的电机。
伺服电机通常能够更及时地响应控制系统的指令,并且具有更高的精度和性能。
2. 应用领域步进电机:步进电机适用于需要简单位置控制的场合,如打印机、数控机床、3D 打印机等。
由于步进电机没有速度和位置反馈控制,因此在需要更高精度和速度的应用中往往表现不佳。
伺服电机:伺服电机适用于对位置、速度和转矩要求较高的自动化系统中,如飞机控制系统、机器人、医疗设备等。
伺服电机能够根据传感器反馈的信号实现更高精度的闭环控制。
3. 性能特点步进电机:- 简单控制,易于编程。
- 低成本,可靠性高,需使用专用驱动器。
- 无需外部传感器反馈,但容易失步。
- 通常适用于低速、低精度的应用。
伺服电机: - 高性能,精度高。
- 价格较高,需要专用控制器与反馈系统。
-高速响应,稳定性好,适用于高精度、高速度的控制系统。
- 需要传感器反馈,实现闭环控制,准确度更高。
4. 总结综上所述,步进电机和伺服电机在工作原理、应用领域和性能特点上存在明显的区别。
选择合适的电机取决于具体的应用需求,如果需要简单的位置控制且成本较低,步进电机是一个不错的选择;而如果需要更高的精度、速度和稳定性,伺服电机则更为适合。
在实际工程中,我们应根据实际需求来选择适合的电机类型,以确保系统的稳定运行和高效性能。
伺服电机和步进电机的区别

伺服电机和步进电机的区别伺服电机和步进电机是两种常见的电动机类型,它们在工业和自动化领域中都有着广泛的应用。
虽然它们在操作原理和性能上有所不同,但都是用来将电能转化为机械能以实现精确的运动控制。
本文将从几个方面来详细阐述伺服电机和步进电机的区别。
1. 工作原理:伺服电机是通过将电机转子的位置反馈与控制器中的设定位置进行比较,然后对电机进行调整以保持位置的准确性。
它通常由电机、编码器和控制器组成,控制器通过不断调整电机的输入信号,使其保持在设定的位置。
步进电机则是通过控制电机的脉冲信号来驱动电机转动。
每个脉冲信号将使电机转子移动一个固定的步距,而且步进电机的运动是离散的,它没有位置反馈环路,因此无法实现精确定位和速度控制。
2. 控制方式:伺服电机通常使用闭环控制系统,它能够感知运动过程中的任何位置偏差,并通过调整输入信号来纠正这些偏差。
因此,伺服电机能够实现非常精确的位置和速度控制。
而步进电机通常使用开环控制系统,只需提供恰当的脉冲信号即可使电机转动。
但由于没有位置反馈,当负载变化或步进电机负载过重时,步进电机容易丢步,导致运动位置的误差。
3. 动态响应:伺服电机的动态响应性能优于步进电机。
由于伺服电机有位置反馈环路,并通过控制器实时调整输入信号,所以能够更精确地控制和调节运动位置、速度和加速度。
步进电机的动态响应受限于脉冲信号的频率和步距角。
虽然通过增加脉冲频率可以提高步进电机的转速,但在高速或高负载情况下,步进电机的动态响应性能会下降,容易产生失步现象。
4. 负载承受能力:伺服电机能够以较高的力矩输出进行运动控制,适用于大负载和高精度的应用。
因为其具有位置反馈和动态调整功能,能够根据负载的变化实时调整控制信号,保持较高的运动精度。
相比之下,步进电机的力矩输出相对较低,通常适用于较小的负载和低精度的应用。
步进电机常用于一些相对简单的工作,如印刷、包装和纺织等行业中。
5. 适用领域:由于伺服电机的高精度、高速度和高负载承受能力,它广泛应用于需要精确控制位置、速度或加速度的领域,例如机床、机器人、自动化生产线等。
步进电机与伺服电机的综合比较

步进电机与伺服电机的综合比较步进电机和伺服电机是自动化工业生产中常用的执行电机,其应用领域十分相似,但事实上两者之间是存在一定差异的,本文通过说明两者之间的特点和工作原理,进一步分析了两者之间的区别,给实际生产运用提供了参考。
一、步进电机和伺服电机的主要特点(一)步进电机的主要特点1.步进电机没有积累误差。
一般来说,步进电机的精度大约是其实际步距角的3~5%,且不会累积。
2.步进电机在工作时,电脉冲信号会按一定顺序(例如A-B-C-A-B-C等)轮流加到各相绕组上。
3.步进电机与其它电机不同,其实际工作电压和电流可以超过额定大小,但选择时不应偏离额定值太多。
4.步進电机外表允许的最高温度可以达到80-90° C。
5.步进电机的力矩会随着其频率(或速度)的增大而降低。
6.混合式步进电机驱动器的供电电源电压一般是一个较宽的范围。
7.可以通过将电机与驱动器接线的A+和A-(或者B+和B-)对调即可改变其旋转方向。
(二)伺服电机的主要特点1.起动转矩比较大,当一旦给定子提供控制电压,转子就会立即转动,所以伺服电机具有起动快、灵敏度高的特点。
2.运行范围比较广。
3.不会产生自转现象,正常运转的伺服电机一旦失去控制电压,电机立即停止运转。
二、步进电机和伺服电机的工作原理(一)步进电机的工作原理步进电机可以将电脉冲信号转换为机械信号,步进电机每发送一个电脉冲,就可以使其旋转一个固定的角度,称为步距角。
步距角的大小由其转子齿数Zr 和拍数N所决定。
当连续给电机发送多个电脉冲信号时,就可以使其进行连续运行。
此外,可以通过改变发送的电脉冲信号的频率来控制电机转动的速度,从而实现精确定位和调速的目的。
(二)伺服电机的工作原理伺服电机内部也同样由定子和转子组成,其转子是永磁铁,驱动器控制的三相电首先在定子绕组中形成电磁场,而转子在这种电磁场的作用下发生旋转,与此同时伺服电机通过编码器将转动信号反馈给驱动器,通过闭环调节在驱动器内调整转子转动的角度,从而实现精确的定位控制。
伺服电机与步进电机工作原理一样吗
伺服电机与步进电机工作原理一样吗伺服电机和步进电机在现代工业领域中被广泛应用,它们分别具有独特的特点和适用场景。
虽然它们都是用来控制运动的电机,但它们的工作原理却有着显著的区别。
伺服电机的工作原理伺服电机是一种能够控制位置、速度和加速度等参数的电机。
它通过与传感器和控制器配合工作,可以实现精确的控制和闭环反馈。
伺服电机通过不断地读取传感器反馈的位置信息,并与目标位置进行比较,通过控制器来调节电机的输出功率,以实现精确的位置控制。
步进电机的工作原理步进电机是一种将输入脉冲信号转化为离散的步进运动的电机。
它通过控制输入的脉冲信号的频率和方向来控制电机的旋转角度。
步进电机不需要外部的传感器和反馈系统,它的位置信息仅依赖于输入的脉冲信号的数量和方向。
两者工作原理的区别伺服电机和步进电机的工作原理有着明显的区别。
伺服电机通过不断地读取传感器反馈的位置信息,并与目标位置进行比较来实现精确的位置控制;而步进电机则是通过控制输入的脉冲信号的数量和方向来控制电机的旋转角度。
可以说,伺服电机是基于闭环控制的,而步进电机是基于开环控制的。
另外,伺服电机通常具有更好的动态响应能力和稳定性,适用于需要高精度、高速度控制的场景;而步进电机主要用于对位置要求不是很高,但需要简单、稳定控制的场景。
在实际应用中,根据需要选择合适的电机类型是非常重要的。
伺服电机适用于对精度和响应速度要求高的场合,而步进电机适用于对成本和控制简易性要求较高的场合。
综上所述,尽管伺服电机和步进电机都是用来控制运动的电机,但它们的工作原理存在着明显的差异,针对不同的应用场景可以选择不同类型的电机来实现最优的控制效果。
伺服电机和步进电机的区别(一)
伺服电机和步进电机的区别(一)伺服电机和步进电机是目前工业中应用比较广泛的两种电动机,它们在驱动精度、反应速度、能耗等方面有比较明显的差异。
接下来将从以下四个方面对它们进行比较。
1. 基本工作原理伺服电机的基本工作原理是在控制器的作用下,将反馈的位置和速度信号与预设的目标位置、速度进行比较后,通过调节电机的电流大小和方向,实现精确的控制。
而步进电机的工作原理是在控制器的驱动下,按照预设的步进角度以及方向进行转动,具有固定的步进角度,能够比较稳定地输出转矩。
2. 驱动精度伺服电机在驱动精度方面表现更为优异,可以实现更高的控制精度,不仅可以达到较高的转速,还可以精确地控制位置、速度等参数。
而步进电机虽然在精准定位方面有一定的优势,但是在运动过程中容易发生失步,导致驱动精度有时候不能够得到很好的保证。
3. 反应速度伺服电机具有更快的反应速度,可以更快地响应控制信号进行控制,应用范围更广,适用于速度要求较高的场合。
而步进电机由于在控制信号响应速度以及电磁转矩上存在一定的局限性,反应速度相对较慢,适用于速度要求较低的场合。
4. 能耗与实际应用伺服电机在能耗上比步进电机高出不少,而且在实际应用中,伺服电机具有更广泛的适用性,更加稳定,控制也更为直观,可以应用在许多不同场所,比如机床、自动化设备、飞机、船舶等。
而步进电机则主要应用于定位、打印等精细控制领域,其性价比表现更好。
总的来说,伺服电机和步进电机是应用比较广泛的两种电动机,在驱动精度、反应速度、能耗等方面有明显的差异,它们在不同的场合具有不同的应用价值。
因此,在采用电动机的时候,需要根据实际应用的情况进行选择,以达到最好的驱动效果。
伺服电机与步进电机的区别
1.1步进电机原理步进电机作为控制用的特种电机,是将电脉冲转化为角位移的执行机构。
当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的步进角度一步一步运行的。
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的,改变绕组的通电顺序,电机就会反转。
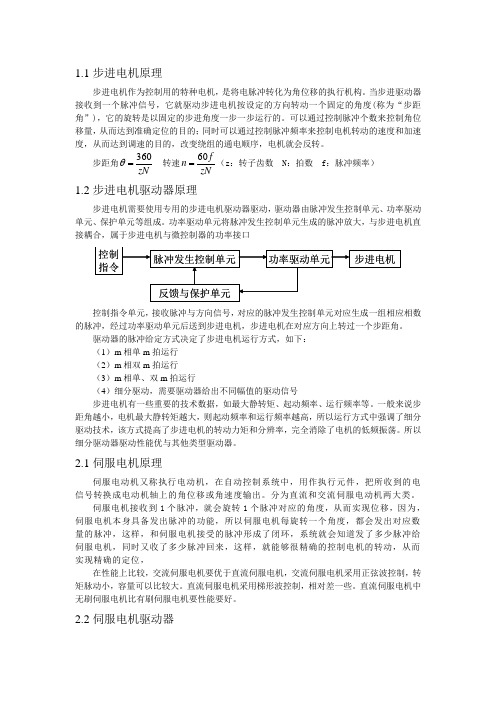
步距角zN 360=θ 转速zNf n 60=(z :转子齿数 N :拍数 f :脉冲频率) 1.2步进电机驱动器原理步进电机需要使用专用的步进电机驱动器驱动,驱动器由脉冲发生控制单元、功率驱动单元、保护单元等组成。
功率驱动单元将脉冲发生控制单元生成的脉冲放大,与步进电机直接耦合,属于步进电机与微控制器的功率接口控制指令单元,接收脉冲与方向信号,对应的脉冲发生控制单元对应生成一组相应相数的脉冲,经过功率驱动单元后送到步进电机,步进电机在对应方向上转过一个步距角。
驱动器的脉冲给定方式决定了步进电机运行方式,如下:(1)m 相单m 拍运行(2)m 相双m 拍运行(3)m 相单、双m 拍运行(4)细分驱动,需要驱动器给出不同幅值的驱动信号步进电机有一些重要的技术数据,如最大静转矩、起动频率、运行频率等。
一般来说步距角越小,电机最大静转矩越大,则起动频率和运行频率越高,所以运行方式中强调了细分驱动技术,该方式提高了步进电机的转动力矩和分辨率,完全消除了电机的低频振荡。
所以细分驱动器驱动性能优与其他类型驱动器。
2.1伺服电机原理伺服电动机又称执行电动机,在自动控制系统中,用作执行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输出。
分为直流和交流伺服电动机两大类。
伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移,因为,伺服电机本身具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,这样,和伺服电机接受的脉冲形成了闭环,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,这样,就能够很精确的控制电机的转动,从而实现精确的定位,在性能上比较,交流伺服电机要优于直流伺服电机,交流伺服电机采用正弦波控制,转矩脉动小,容量可以比较大。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
伺服电机与步进电机的工作原理和六大区别
要想区分,先得搞懂两种之间的区别。
先说工作原理:
步进电机是一种将电脉冲转化为角位移的执行机构。
当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频
率来控制电机转动的速度和加速度,从而达到调速的目的。
伺服电机内部的转子是永磁铁,驱动器控制的U/V/W 三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱
动器根据反馈值与目标值进行比较,调整转子转动的角度。
伺服电机的精度
决定于编码器的精度(线数)。
区别1:控制的方式不同
步进电机是通过控制脉冲的个数控制转动角度的,一个脉冲对应一个步距。