串行控制系统原理图
基于串行通信的发射机控制系统设计

信 息 系 统 与 网 络
基 于 串行 通 信 的发 射 机 控 制 系统 设 计
杨 国斌 , 正 予 , 赵 陈 罡 , 时 雨
( 汉大 学 电子 信 息学 院 , 北 武 汉 4 07 ) 武 湖 3 0 9
摘 要 介绍 了 一 种应 用 于 电离 层 探 测 系 统 中 的 固态 发 射 机 。 为 了 实 现 对 该 发 射 机 的 远程 控 制 , 出 了在 w dw 环 境 提 i os n
in s h rc su dig sse o o p e o n n y tm i
0 引言
在一般 的电离 层 探 测 系统 中 ( 主要 分 为 垂 直探
测和斜 向探测 ) 发 射机 工 作在 高 频 段 , 射 功 率 一 , 发
1 系统 的硬 件 设 计
S X 3 M发 射 机具 有 良好 的 自动控 制模 块 , T 10 其
o tie b an d. Ke r s y wo d s ra c mmu iain;sra p r p ga e l o i nc to e l o i t r rmmig;ta s te r moe o to ;RS 一 2 2 o n r n mitr e t c nr l 3 /RS 一 4 2 o v rin n efc 2 c n eso itra e;
关键词 串行通 信 ; 串口编程 ; 发射机远程控制 ;S 3/ S一 2 R 一22 R 4 2转换接 口; 电离层探测系统
中图 分 类 号 T 9 73 N5 . 文 献 标 识 码 A
De i n o a s itr Co to y t m s d o sg fa Tr n m te n r lS se Ba e n t e I m o e S ra m m un c to h t e ilCo ia i n
新时达串行控制远程监控用户手册

电梯远程监控系统安装、操作手册上海新时达电气有限公司电梯远程监控系统安装、操作手册出版状态:标准产品版本: V2.0上海新时达电气有限公司版权所有,保留一切权利在没有得到本公司许可时,任何单位和个人不得擅自摘抄、复制本书(软件等)的一部分或全部,不得以任何形式(包括资料和出版物)进行传播。
版权所有,侵权必究。
内容如有改动,恕不另行通知。
Copyright© by Shanghai STEP Electric Co., Ltd.All rights reservedThe information in this document is subject to change withoutnotice . No part of this document may in any form or by anymeans(electronic,mechanical,micro-coping,photocopying,recordingor otherwise) be reproduced,stored in a retrival system ortransmitted without prior written permission from ShanghaiSTEP Electric Co., Ltd.主编:毛旭编委:沈辉忠董恩源蔡亮胡志涛马建雄毛旭审核:马建雄胡志涛出版说明内容提要首先,感谢您使用新时达电气有限公司的产品。
本操作、使用手册是利用上海新时达电气有限公司提供的监控软件对新时达电气SmartComII电梯进行监控时,具体安装、使用的说明。
本手册可作为系统安装、调试、维护的使用资料。
读者对象用户电梯控制设计人员工程维护人员用户技术支援人员目录名称名称页码第一章系统简介 (6)第二章系统要求 (7)第三章软件安装 (8)第四章参数设定 (12)第五章主界面的使用 (19)第六章监控连线 (27)附录1 新时达调制解调器一览 (28)附录2 通讯控件的安装 (29)附录3 媒体播放器的设置 (31)附录4 调制解调器的检验 (33)第一章 系统简介电梯运行监控系统的作用为:通过远程监控中心,使用电话网并通过通信控制器(调制解调器),建立监控中心与电梯控制器间的双向通讯,从而实现了:1.可对电梯控制器的运行参数进行查询2.可在电梯故障状态下通过控制中心对电梯进行故障诊断3.可远端命令控制使用本软件,不但可以减少现场维护的工作量,同时降低了产品维护的成本,对提高企业的经济效益大有帮助。
BL2000串行控制系统参数设置PPT课件

2021/3/9
6
1. 总楼层数设定
Total Floor 64
总楼层数
2. 待梯层设定
无外召和内选时电梯延时(返基站时间)返回的楼层, 设置方法同上。
Homing Floor 1
待梯楼层
2021/3/9
7
3. 消防疏散层设定
收到消防开关信号后,电梯消除内选、外召后直接到达消 防疏散层。
Fire Floor 01
BL2000系统简介
• BL2000电梯控制系统是蓝光 2002年研发完成并推出市场的串行 电梯控制系统,到目前为止已经经 历了6年的现场应用。根据现场对各 种不同功能要求以及应用问题的反
馈,我们不断对其功能以及性能进
行改进,使该系统成为目前国内技
术最成熟、功能最完善、使用最广 泛的电梯控制产品。
2021/3/9
P1,b1,P2 增大
b1 P1
P2
P1,b1,P2 减小
P3,b2,P4 增大
P3,b2,P4
P3
减小
b2
P4
◇ 增大参数值,曲线相应部分变急;减小参数值,曲线相应部
分变缓;适当调整以上六个曲线参
数可获得很好的舒适感,并满足电梯标准的有关条款要求。
2021/3/9
27
平层调整
1.平层调整
当电梯对每一楼层上、下行停梯均不在同一位置时,调整 该参数(上高、下低时减小,反之增大)。调整量为平 层差值的一半(缺省值为50mm)。
Output Type Y01: Off
断开有效
2021/3/9
▲注意: 输出继 电器Y12 在使用 富士变 频器时 做为使 能信号 应设为 ON。
10
3. 输入功能选择
甲乙两机串口通信双向控制系统软件设计与系统仿真课案
case 0: transfer('D');
led1=1; led2=1;
break;
case 1: transfer('A');
led1=0; led2=1;
break;
case 2: transfer('B');
led1=1; led2=0;
break;
case 3: transfer('C');
1.
题目设计要求:
甲乙两机串口双向通信设计
要求:利用51单片机,RS232芯片,LED灯,数码管进行双机通信设计。甲机可按键控制乙机的LED显示;乙机可按键控制甲机的数码管显示。完成以下设计环节:
1)使用Altium Desinger开发工具,设计电路原理图。
2)使用Uvision2开发平台,采用C语言或汇编语言设计软件程序。
TMOD=0x20;//定时器T1工作在方式2
PCON=0x00;
TH1=(256-253)/32;
TL1=(256-253)%32;
RI=0;
TI=0;
TR1=1;
IE=0x90;//串行口中断打开
while(1)
{
if(key==0)
{
while(key==0);
num=(num+1)%4;
}
switch(num)
图2.1总体框图
双机通信系统通过甲乙单片机的串行口来实现数据的收发。
甲单片机通过开关电路来启动发送程序,甲机当开关按下时向乙机发送一个数据,乙机上蜂咛器发出声音提示有数据发送过来,乙机通过接收中断来接收和开关判断是否接收甲机发送过来的数据,并通过编写好的数据代码在8个发光二极管上显示主机发送过来的数据。
基于Matlab串口通信的数据采集系统
辽宁工业大学开放性实验题目基于Matlab串口通信的数据采集系统院(系):电气工程学院学生姓名:指导教师:(签字)起止时间:摘要数据采集是获取信息的基本手段,数据采集技术作为信息科学的一个重要分支,它研究信息数据的采集、存储、处理及控制等作业,具有很强的实用性,与传感器、信号测量与处理、微型计算机等技术为基础而形成的一门综合应用技术。
结合单片机和Matlab两者的优点,基于事件驱动的中断通信机制,提出一种MATLAB 环境下PC 机与单片机实时串行通信及数据处理的方法;完成单片机数据采集系统与PC 机的 RS-232/RS-485 串行通信及其通信数据的分析处理及图形显示;简化系统开发流程,提高开发效率。
通过RS232将数据采集部分和计算机相连,利用Matlab自带的通讯类可开发出通讯与数据采集类软件,通过人机界面完成对数据采集系统的通讯与控制,可设计出性能优良的通讯系统。
本设计是基于MATLAB串口通信技术,通过使用Matlab6.5以及与单片机开发板的结合制作成数据采集系统关键词:Matlab语言;数据采集;串行通信目录第1章绪论 (1)第2章课程设计方案 (2)2.1概述 (2)2.2系统组成总体结构 (2)第3章硬件设计 (4)3.1单片机最小系统设计 (4)3.2单片机与PC机串行接口设计 (5)第4章软件设计 (7)4.1 MATLAB程序设计 (7)4.2 单片机程序设计 (8)第5章系统测试与分析 (10)第6章课程设计总结 (12)参考文献 (13)第1章绪论随着科学技术的发展,数据采集系统得到了越来越广泛得应用,同时人们对数据采集系统的各项技术指标,如:采样率、线性度、精度、输入范围、控制方法以及抗干扰能力等提出了越来越高的要求,特别是精度和采样率更是使用者和设计者所共同关注的重要问题,于是,高速及超高速数据采集系统应运而生并且得到了快速发展。
本文介绍MATLAB环境下上位机与下位机通过RS232接口进行串行通信的实现方法;详细叙述了在MATLAB环境下使用其自带的控制工具箱中的串口事件回调函数,实时接收下位机输出串行信号的实现过程。
f50说明书

4.2 液晶操作器的外观及说明
17
4.3 监控菜单的介绍与操作方法
18
4.4 呼梯控制菜单的介绍与操作方法
20
4.5 故障记录菜单的介绍与操作方法
20
■故障查看
21
■故障清除
21
■故障代码表
22
■故障复位方法
23
4.6 【参数修改】菜单的介绍与操作
24
4.6.1 【参数修改】菜单的流程图
24
4.6.2 【参数修改】菜单的具体定义与说明
12
3.8.1 与主控制器、轿内显示的通讯接口端子说明
12
3.8.2 轿厢通讯板的开关门端子说明
12
3.8.3 轻载、超载、满载等开关的接口端子说明
13
3.9 轿厢通讯板 SWD-F51 说明
13
3.10 轿内显示的设置
13
外呼通讯及显示板 SWD-F52
14
3.11 外呼通讯及显示板 SWD-F52 的外观及布局图
全串行电梯控制系统 SWD-F50 系列
使 用 说 明 书
沈阳维多自控技术有限公司 中德合资沈阳迪森电子有限公司
SWD-F50 电梯控制系统
用户手册 版本:E1-090001
沈阳维多自控技术有限公司为客户提供全方位的技术支持,客户可 直接与公司联系。
版权所有,侵权必究。
沈阳维多自控技术有限公司 地址:沈阳市皇姑区宁山中路 66-3 号 邮编:110031 公司网址: 联系电话:024-86274079 E-mail: sy_wdzk@
学习才真正成功完成。
(1)当电梯运行至最远端楼层停车时,清除
2
防捣乱
停车撤销 内选
所有的内选登记;
IIC总线的串行扩展
(1)控制字节 在起始条件之后,必须是器件的控制字节,其中,高四位
为器件类型识别符(不同的芯片类型有不同的定义,如E2PROM 为1010),接着三位为片选,最低位为读写控制位,为“1”时 为读操作,为“0”时为写操作。如下图所示。
6
(2)写操作 写操作分为字节写和页面写两种操作,对于页面写,根据
1
3. I2C总线协议 I2C总线在传送数据过程中共有三种类型信号:开始信号、
停止信号和应答信号。
开始信号:SCL保持高电平的状态下,SDA出现下降沿。出现 开始信号以后,总线被认为“忙”。
停止信号:SCL保持高电平的状态下,SDA出现上升沿。停止 信号过后,总线被认为“空闲”。
应答信号:接收数据的器件在接收到8位数据后,向发送数据的 器件发出特定的低电平脉冲,表示已收到数据。
总线空闲:SCL和SDA都保持高电平。
总线忙:在数据传送开始以后,SCL为高电平的时候,SDA的 数据必须保持稳定,只有当SCL为低电平的时候才允许SDA上 的数据改变。
2
4. I2C总线的传送格式
I2C总线的传送格式为主从式,对系统中的某一器件来说有 四种工作方式:主发送方式、从发送方式、主接收方式、从接 收方式。 (1)主发送从接收
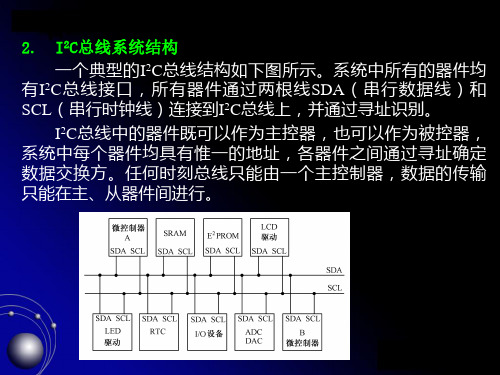
2. I2C总线系统结构 一个典型的I2C总线结构如下图所示。系统中所有的器件均
有I2C总线接口,所有器件通过两根线SDA(串行数据线)和 SCL(串行时钟线)连接到I2C总线上,并通过寻址识别。
I2C总线中的器件既可以作为主控器,也可以作为被控器, 系统中每个器件均具有惟一的地址,各器件之间通过寻址确定 数据交换方。任何时刻总线只能由一个主控制器,数据的传输 只能在主、从器件间进行。
4.串行外设总线SPI
基于DSP和RS-485串行通信的控制系统设计
基于DSP和RS-485串行通信的控制系统设计焦佳伟;石云波;邹坤【摘要】在设计加速度传感器批量标定测试设备时,需要上位机对设备进行实时监测、获取系统信息以及下发数据指令进行控制,因此设计了基于DSP和RS-485串行通信的接口电路,实现了DSP与PC的通信,并成功应用于加速度传感器批量标定测试设备中.该系统硬件电路简单,软件编写容易,拓展性和移植性较好,数据通信稳定可靠.【期刊名称】《自动化与仪表》【年(卷),期】2015(030)010【总页数】4页(P70-72,76)【关键词】DSP;控制系统;RS-485;串行通信【作者】焦佳伟;石云波;邹坤【作者单位】苏州中盛纳米科技有限公司,苏州215123;中北大学电子测试技术国家重点实验室,太原030051;苏州中盛纳米科技有限公司,苏州215123;苏州中盛纳米科技有限公司,苏州215123;中北大学电子测试技术国家重点实验室,太原030051【正文语种】中文【中图分类】TP274加速度传感器在研制后及使用前均需要进行参数性能的测试和标定,用到加速度传感器批量标定测试设备,该设备在运行过程中,需要下发数据指令进行控制,也需要向上位机反馈运行数据,实时对工作过程中的位置信号以及工作状况进行监测和在线分析,达到实时监测的目的,因此需要系统和上位机进行通信。
通常的微处理器都集成有1路或多路硬件UART通道,可以非常方便地实现和上位机进行串行通讯[1]。
在工业控制、智能仪表等领域中,也常常使用简便易用的串行通讯方式作为数据交换的手段。
但在工业控制等环境中,常会有电气噪声干扰传输线路,使用RS-232通讯时经常因外界的电气干扰而导致信号传输错误;另外,RS-232通讯的最大传输距离在不增加缓冲器的情况下只可以达到15 m[2]。
本文基于此设计了一种基于DSP和RS-485串行通信的控制系统,该系统选用SP3485芯片进行串行通信,该芯片采用了平衡差分接收的RS-485通信协议标准,其抗共模干扰能力强,接收灵敏度高,通常被用作为一种相对经济、具有相当高噪声抑制、相对高的传输速率、传输距离远、宽共模范围的通信平台。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
L3
T
KM1(输入接触器)
5 6
T TA2
1 2
J7-1 J7-2
Y10 Y11 Y12 COM4 X11 GND2 X19 VB VS 10
KA6
22 21
1 2 8 11 19 20 25 16 13 17
A30
J7-3 J7-7 J2-2 J3-7 J2-10 J7-8 J7-9 J7-10
13
A30
J7-3 J7-7 J2-2 J3-7 J2-10 J7-8 J7-9 J7-10
13
13
KA2
14
3 4 5 6 7 8 9 10
PG-X2
5 6 7 8 9 B1
PG
TA1
RU1(制动电阻)
B2
22KW以上外接制动单元
YC
PE
PE
标记 处数 设 计 审 核 工 艺
主回路(QMA-700-IP)
库马变频器
S (QMA-700) 1 T
1 2
W +15V GND A B +12V OV A B
W
A30
J8-1 J8-2 J8-5 J8-6
L3
T
KM1(输入接触器)
5 6
J7-1 J7-2
Y10 Y11 Y12 COM4 X11 GND2 X19 VB VS 10
KA6
22 21
FWD REV EF CM EB EC Y1 MFI FIV OV
KM2(输出接触器)
N
PE L1
KA5(相序)
A B C KM1(输入接触器)
1 2
U
1
2
U
Q
R
富士变频器
R
KM2(输出接触器) V
3 4
V
M 1
(VG5N)
W W +12V GND A B J8-1 J8-2 J8-5 J8-6
L2
S
KM1(输入接触器)
3 4
S
PGP PGM PA PB
L3
T
KM1(输入接触器)
PE L1
KA5(相序)
A B C KM1(输入接触器)
1 2
KM2(输出接触器) U
1 2 11
U
Q
R
KM2(输出接触器) KFX R V
3 4 12 22
V
M 1(电机)
L2
S
KM1(输入接触器)
3 4
CT-ES变频器
S
KFX W
21
W
(ES)
3
SLOT2
27 28 31 22
15-WAYD-TYPE
U
1
2
U
安川变频器
(G7A)
R W S TA1 1 2 1 TA2 3 2 4 1 2 TA1 3 5 4 6 P OV V
KM2(输出接触器)
3 4
Q
R
V
M 1(电机)
W +15V GND A B J8-1 J8-2 J8-5 J8-6
L2
S
KM1(输入接触器)
3 4
L3
T
KM1(输入接触器)
5 6
W
A30
J8-1 J8-2 J8-5 J8-6
L3
T
KM1(输入接触器)
5 6
3 T PG-X2
1 2
2 4 6 3 2 4
J7-1 J7-2
Y10 Y11 Y12 COM4 X11 GND2 X19 VB VS 10
KA6
22 21
FWD REV EF CM EB EC Y1 MFI FIV OV
TA1
PG
B1
TA3
RU1(制动电阻)
B2
主回路(L7B)
标记 处数 设 计 审 核 工 艺 分 区 更改文件号 签 名 年、月、日 标准化 阶 段 标 记 重 量 比 例 1:1 批 准 共 16 张 第 1 张
KM2(输出接触器)
N
PE L1
KA5(相序)
A B C KM1(输入接触器)
1 2
14
3 4 5 6 7 8 9 10
PG
PE
RU1(制动电阻)
PB
22KW以上外接制动单元
10
21
PE
PE
标记 处数 设 计 审 核 工 艺
主回路(TD3100)
分 区 更改文件号 签 名 年、月、日 标准化 阶 段 标 记 重 量 比 例 1:1 批 准 共 16 张 第 1 张
N
PE L1
KA5(相序)
控制柜随机接线图纸 适用范围 主控板 DT-3000
内容:控制柜接线图 电缆接线、布置图 外围接线图
KM2(输出接触器)
N
PE L1
KA5(相序)
A B C KM1(输入接触器)
1 2
U
1
2
U
Q
R
安川变频器
R
KM2(输出接触器) V
3 4
V
M 1(主机)
(616G5)
W W +15V GND A B J8-1 J8-2 J8-5 J8-6
14
3(使能) 4(共线) 5(故障) 6(共线) 7(运行中) 8(称重) 9(主速度) 10(共线)
PG
PE
41 42 25 7 6 5 3
+DC
RU1(制动电阻)
BR
30 23
PE
PE
标记 处数 设 计 审 核 工 艺
主回路(同步ES模拟量)
分 区 更改文件号 签 名 年、月、日 标准化 阶 段 标 记 重 量 比 例 1:1 批 准 共 16 张 第 1 张
KA2
14
3 4 5 6 7 8 9 10
PG
TA3
RU1(制动电阻)
B
15KW以上外接制动单元
PE
PE
标记 处数 设 计 审 核 工 艺
主回路(G7A)
分 区 更改文件号 签 名 年、月、日 标准化 阶 段 标 记 重 量 比 例 1:1 批 准 共 16 张 第 1 张
N
PE L1
KA5(相序)
A B C KM1(输入接触器)
1 2
KM2(输出接触器) U
1 2 11
U KFX
12 22
Q
R
KM2(输出接触器) R V
3 4
V
M 1(电机)
L2
S
KM1(输入接触器)
3 4
库马变频器
S (QMA-700-IP) W +15V GND A B +5V OV A+ AB+ BZ+ Z-
21
KFX
Y10 Y11 Y12 COM4 X11 GND2 X19 VB 10 13 14 15 13
13
A30
3 2 4 5 6 7 8 9
+5V GND A+ AB+ BZ+ Z-
A30
KA2
J7-3 J7-7 J2-2 J3-7 J2-10 J7-8 J7-10 J7-4 J7-5 J7-6
14
3 4 5 6 7 9 10 13 14 15
5 6
T
1 2
J7-1 J7-2
Y10 Y11 Y12 COM4 X11 GND2 X19 VB VS
KA6
22
FWD REV X1 COM TB TA Y1 AI1 AI2 AI2GND CM1
OB PGP PGM A B ABP1 +
A30
J7-3 J7-7 J2-2 J3-7 J2-10 J7-8 J7-9 J7-10
5 6
T
1 2
J7-1 J7-2
Y10 Y11 Y12 13 COM4 X11 GND2 X19 VB VS 10
KA6
22 21 13
A30
+12V OV A B
FWD REV THR CM 30C 30B Y1 AII X5 M CME
A30
KA2
PGP PGM PA PB
J7-3 J7-7 J2-2 J3-7 J2-10 J7-8 J7-9 J7-10
T
1 2
J7-1 J7-2
Y10 Y11 Y12 COM4 X11 GND2 X19 VB VS 10
KA6
22 21
A30
+12V A B
S1 S2 S8 SC MB MC M1 A3 A1 AC M2
A30
J7-3 J7-7 J2-2 J3-7 J2-10 J7-8 J7-9 J7-10
13
13
N
PE L1
KA5(相序)
A B C KM1(输入接触器)
1 2
KM2(输出接触器) U
1 2 11
U KFX
12 22
Q
R
KM2(输出接触器) R V
3 4
V
M 1(电机)
L2
S
KM1(输入接触器)
3 4
安川变频器
S 676GL5-IP W
21
KFX
W
A30
1 J8-7 J8-8 J8-9 J8-10 +5V OV A+ AB+ BZ+ Z2 3 4 10 3 2 4
3 4 22
V
M 1(电机)
21
KFX
L2
S
KM1(输入接触器)
3 4
W S TA2 T
1 2
W
1 2 3 4
S1 S2 BB BB1 SC MB M2 MC M1 A1 AC S5 S6 S7