距离矢量协议和链路状态协议的区别(参考模板)
距离矢量和链路状态区别

距离矢量和链路状态区别距离矢量(DV)是“传说的路由”,A发路由信息给B,B加上自己的度量值又发给C,路由表里的条目是听来的,虽说“兼听则明,偏信则暗”,但是选出最优路径的同时会引发环路问题,当然,DV协议也使用水平分割,毒性逆转,触发更新等特性来避免,无奈的是,这种问题对于竞争对手LS而言是天生免疫的。
链路状态(LS)是“传信的路由”,A将信息放在一封信里发给B,B对其不做任何改变,拷贝下来,并将自己的信息放在另一封信里,两封信一起给C,这样,信息没有任何改变和丢失,最后所有路由器都收到相同的一堆信,这一堆信就是LSDB。
然后,每个路由器运用相同的SPF算法,以自己为根,计算出SPF Tree(即到达目的地的各个方案),选出最佳路径,放入转发数据库中(即路由表)。
链路状态协议有三样看家本领:LSDB,SPF算法,SPF Tree。
还有三张表:邻居表,拓扑表,路由表,但这三张表并不是DV和LS的根本区别,EIGRP作为高级的距离矢量路由协议同样有这三张表,关键点在于表的内容和传递信息的过程。
DV的拓扑表事实上是邻居通告的路由条目的集合,依据算法从中选出最佳的放进路由表,它并不完全了解网络拓扑;而LS的拓扑表是真正意义上的网络拓扑,路由器对网络信息完全了解,所以可以独立的做出决策,确定最佳路由。
举例来说,如果我是DV的思维,我从华师去火车东站,通过询问知道,我可以在走到师大暨大车站坐515路车,也可以走到坐177路车,这样问下来有几种方案,我再选一个最优的,以这样的方式我就知道广州市内的一些地方该怎么去;而如果我是LS的思维,我会先去四下打听,搜集信息然后汇总成一张广州市区的地图,然后依据这张地图自己决定如何去火车东站以及其它地方。
路由过滤器对DV和LS的影响也是不同的。
运行DV的路由器基于自身的路由表来通告路由信息,其结果是路由过滤器将会对通告产生影响。
运行LS的路由器是基于自身的链路状态数据库来计算出自己的路由,路由过滤器对两路状态的通告和链路状态数据库没有影响,所以只会影响本路由器的路由表的安装,正是因为这种特性,路由过滤器主要被用在进入链路状态域的重新分配点上,即在ASBR执行重发布时,控制那些要进入或离开的路由.-------------------------------------------------------------------所以我们总结一下链路状态选择协议的优缺点如下:链路状态路由选择的优点:1.收敛速度快:触发更新在每个路由器上进行2.没有路由环路:才用SPF算法3.分等级设计网络和路由,更合理的利用网络资源4.和距离矢量路由协议相比,链路状态路由协议的故障排除更为复杂链路状态路由选择的缺点:1.占用系统和网络资源:a.对处理器和内存的要求高b.第一次链路状态信息交换使用泛洪方式2.设计复杂:需要遵循严谨的区域划分原则3.配置可能比较复杂:设计多区域链路状态路由选择时,配置有时可能比较复杂。
路由的内外部分类

路由的内外部分类一、内部路由内部路由是指在一个自治系统(Autonomous System,简称AS)内部进行的路由。
自治系统是指由同一管理机构负责的一组IP地址。
内部路由协议是用于在自治系统内部进行路由选择的协议。
1.距离矢量路由协议距离矢量路由协议是一种基于距离和方向的路由选择协议,常见的距离矢量路由协议有RIP(Routing Information Protocol)和IGRP(Interior Gateway Routing Protocol)。
这些协议通过周期性地交换路由信息,计算出到达目的网络的最短路径,并将路由表信息更新到路由器的路由表中。
2.链路状态路由协议链路状态路由协议是一种基于路由器之间链路状态信息交换的路由选择协议,常见的链路状态路由协议有OSPF(Open Shortest Path First)和IS-IS(Intermediate System to Intermediate System)。
这些协议通过交换链路状态信息,计算出到达目的网络的最短路径,并将路由表信息更新到路由器的路由表中。
3.路径矢量路由协议路径矢量路由协议是一种基于路径矢量信息交换的路由选择协议,常见的路径矢量路由协议有BGP(Border Gateway Protocol)和EIGRP(Enhanced Interior Gateway Routing Protocol)。
这些协议通过交换路径矢量信息,计算出到达目的网络的最短路径,并将路由表信息更新到路由器的路由表中。
二、外部路由外部路由是指在不同自治系统之间进行的路由。
不同自治系统之间的路由选择是通过外部路由协议进行的。
1.BGPBGP是一种边界网关协议,用于在不同自治系统之间进行路由选择。
BGP通过交换路由信息,使得不同自治系统之间能够找到到达目的网络的最佳路径。
BGP的特点是具有非常高的可扩展性和稳定性,被广泛应用于互联网中。
2.EGPEGP是一种早期的外部网关协议,用于在不同自治系统之间进行路由选择。
距离矢量路由协议和链路状态路由协议

距离矢量路由协议和链路状态路由协议距离矢量路由协议和链路状态路由协议是计算机网络中常见的两种路由协议。
它们分别通过不同的方式来确定网络中数据包的最佳传输路径。
本文将对这两种路由协议进行深入探讨,从协议原理、工作方式、优缺点等几个方面进行比较分析,以便读者更好地理解两种路由协议的异同之处。
一、距离矢量路由协议距离矢量路由协议(Distance Vector Routing Protocol)是一种基于距离度量的路由选择协议,它根据每条路径的距离(即跳数或者成本)来确定最佳路径。
常见的距离矢量路由协议有RIP(Routing Information Protocol)和IGRP(Interior Gateway Routing Protocol)等。
1.1原理距离矢量路由协议的原理比较简单,每个路由器会周期性地向它的邻居路由器发送路由更新信息,包括自己所知道的所有网络地址及到达这些地址的距离。
邻居路由器收到这些更新信息后,会根据这些信息更新自己的路由表。
如果某个路由器的路由表发生变化,它就会通知它的邻居路由器。
通过这种方式,路由表信息会在整个网络中传播,直到所有路由器的路由表都收敛到最优状态。
1.2工作方式距离矢量路由协议的工作方式是分散式的,每个路由器只知道它直接相连的邻居路由器的路由信息,并且根据这些信息来计算到达其他网络的最佳路径。
因此,距离矢量路由协议的路由表只包含了直接相连的邻居路由器的信息,而不包含整个网络的拓扑结构信息。
1.3优缺点距离矢量路由协议的优点是实现比较简单,对网络带宽和处理器资源的需求较低。
但是它也存在很多缺点,比如收敛速度慢、不适合大型网络、易受环路影响等。
二、链路状态路由协议链路状态路由协议(Link State Routing Protocol)是另一种常见的路由选择协议,它根据网络中每个路由器的链路状态信息来计算最佳路径。
常见的链路状态路由协议有OSPF(Open Shortest PathFirst)和IS-IS(Intermediate System to Intermediate System)等。
链路状态路由协议
链路状态路由协议百科名片链路状态路由选择协议又称为最短路径优先协议,它基于Edsger Dijkstra的最短路径优先(SPF)算法。
它比距离矢量路由协议复杂得多,但基本功能和配置却很简单,甚至算法也容易理解。
路由器的链路状态的信息称为链路状态,包括:接口的IP地址和子网掩码、网络类型(如以太网链路或串行点对点链路)、该链路的开销、该链路上的所有的相邻路由器。
链路状态路由协议链路状态路由协议是层次式的,网络中的路由器并不向邻居传递“路由项”,而是通告给邻居一些链路状态。
与距离矢量路由协议相比,链路状态协议对路由的计算方法有本质的差别。
距离矢量协议是平面式的,所有的路由学习完全依靠邻居,交换的是路由项。
链路状态协议只是通告给邻居一些链路状态。
运行该路由协议的路由器不是简单地从相邻的路由器学习路由,而是把路由器分成区域,收集区域的所有的路由器的链路状态信息,根据状态信息生成网络拓扑结构,每一个路由器再根据拓扑结构计算出路由。
编辑本段链路状态的工作过程1、了解直连网络每台路由器了解其自身的链路(即与其直连的网络)。
这通过检测哪些接口处于工作状态(包括第3层地址)来完成。
对于链路状态路由协议来说,直连链路就是路由器上的一个接口,与距离矢量协议和静态路由一样,链路状态路由协议也需要下列条件才能了解直连链路:正确配置了接口IP地址和子网掩码并激活接口,并将接口包括在一条network 语句中。
2、向邻居发送Hello数据包每台路由器负责“问候”直连网络中的相邻路由器。
与EIGRP路由器相似,链路状态路由器通过直连网络中的其他链路状态路由器互换Hello数据包来达到此目的。
路由器使用Hello协议来发现其链路上的所有邻居,形成一种邻接关系,这里的邻居是指启用了相同的链路状态路由协议的其他任何路由器。
这些小型Hello数据包持续在两个邻接的邻居之间互换,以此实现“保持激活”功能来监控邻居的状态。
如果路由器不再收到某邻居的Hello数据包,则认为该邻居已无法到达,该邻接关系破裂。
距离矢量路由协议和链路状态路由协议区别,ospf建立邻接关系过程
缺点
收敛速度慢。使用定期更新可能会导致收敛速度 减慢。即使使用触发更新,总体收敛速度仍然比 链路状态路由协议慢。 可扩展性有限。收敛速度慢会对网络的规模产生 限制,因为大型网络需要较长时间来传播路由信 息。 路由环路。在发生了改变的拓扑中,收敛速度缓 慢会导致不一致的路由表无法及时得到更新,从 而可能造成路由环路
链路状态路由协议
• 又称为 最短路径优先协议。
• 路由器之间传递链路状态信息,成了数据库,通过 SPF(最短路径 优先)算法,计算出路由条目。
• 最典型的2种链路状态路由协议
– OSPF(开放最短路径优先) – IS-IS(中间系统到中间系统)
链路状态路由协议
链路状态路由协议的优点:
• • • • 每台路由器自行创建网络拓扑图以确定最短路径。 立即泛洪,实现快速收敛。 仅当拓扑变化时才发送链路状态数据包,而且仅包含变化的信息。 多区域环境中采取了层次式设计。
选举原则:DR/BDR的选举根据路由器优先级,高者为DR, 次高者为BDR。除DR/BDR的路由器之外称为DRother。如 果Priority值相同,Router-ID值大者成为DR。
注:1、DR/BDR一旦选定,即使OSPF区域内新增优先级更高的路由器,DR 和BDR也不重新选举,只有当DR和BDR都失效后,才参与选举。 2、OSPF的DR/BDR的选举是基于接口的,而不是基于路由器的。一台路 由器可能是一个网段的DR,是另一个网段的BDR,还可能是DRother。
Hello(neighbor=“ ”) Hello(neighbor=“ ”) Hello(neighbor=“RB”) Hello(neighbor=“RA”) Down Init 2-way ExStart
TCP-IP距离矢量 And 链路状态 路由选择协议

TCP/IP路由卷一系列:(6)距离矢量And链路状态路由选择协议于目前存在的路由选择协议可以按照距离矢量和链路状态进行分类,可以说距离矢量和链路状态两种采用的是不同的算法,也有着不同的特性和区别,所以,在学习路由选择协议之前,了解它们怎么的特性和区别是非常有必要的。
距离矢量路由选择协议距离矢量的路由更新就好比我们生活中的路标,去往某某地方,按照路标指示的方向进行,而自身并不知道它是否是正确的。
而距离矢量一样,都依赖于邻居路由器,邻居路由器传递了什么路由信息给自己,自己又传递给另外的邻接路由器,所以,我们有时候又称为听信传闻的路由协议,它们并不能确认这路由信息是否是最好或者有效的。
目前存在的距离矢量协议有RIP和EIGRP,主要应用于现网的,当然RIP已经越来越不被采用了一、距离矢量通用的属性1、定期更新:不同的路由协议比如RIP和IGRP都会周期性的发送路由更新给邻居路由器,但是为了避免冲突,在更新周期加了一个15%的随机数,也就是说更新周期后根据这15%进行波动。
比如RIP周期性为30s,实际上是25.5~302、邻居:邻居之间会互相发送路由更新,并且传递给其他邻居,而邻居的概念在某些协议中并不存在,比如RIP,它没有邻居的概念,所有的路由都存放在database中。
3、广播更新:一种把路由信息告诉邻居的方式,通过255.255.255.255向激活了某个路由协议的接口发送出去。
4、全路由表更新:当到达定期更新后期后,就会把全部路由表的信息发送给邻居。
5、大部分距离矢量协议采用的是Bellman-Ford算法,但是,EIGRP是个例外,它采用的是DUAL算法。
这些通用属性明显的说明了早起距离矢量协议的特点,但是,对于后期的协议来说已经改进了许多工作方式,这样才能适应当前的网络。
二、依照传闻进行路由选择分析这是卷一给出的一个经典的案例,很好的说明了,距离矢量路由协议在更新时候的过程。
1、在t0时刻,也就是在每个设备的直连信息都正确配置的情况下,每个路由器都只有各自的直连信息。
软考中级网络工程师题库第6章 网络互连与互联网练习3与参考答案
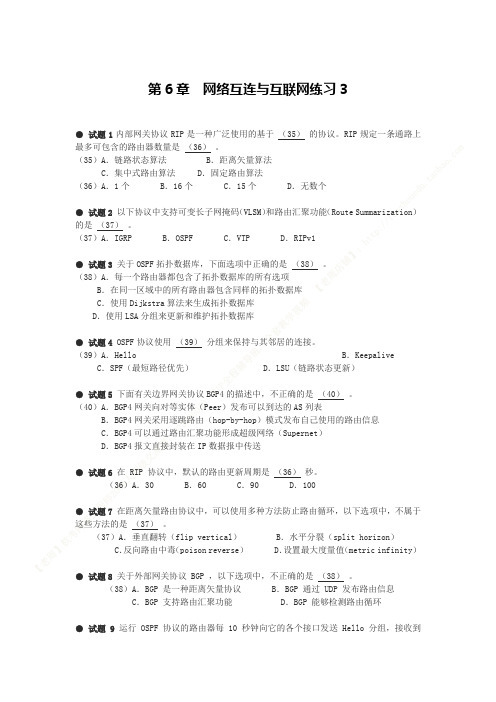
第6章网络互连与互联网练习3●试题1内部网关协议RIP是一种广泛使用的基于(35)的协议。
RIP规定一条通路上最多可包含的路由器数量是(36)。
(35)A.链路状态算法 B.距离矢量算法C.集中式路由算法 D.固定路由算法(36)A.1个 B.16个 C.15个 D.无数个●试题2以下协议中支持可变长子网掩码(VLSM)和路由汇聚功能(Route Summarization)的是(37)。
(37)A.IGRP B.OSPF C.VTP D.RIPv1●试题3关于OSPF拓扑数据库,下面选项中正确的是(38)。
(38)A.每一个路由器都包含了拓扑数据库的所有选项B.在同一区域中的所有路由器包含同样的拓扑数据库C.使用Dijkstra算法来生成拓扑数据库D.使用LSA分组来更新和维护拓扑数据库●试题4 OSPF协议使用(39)分组来保持与其邻居的连接。
(39)A.Hello B.Keepalive C.SPF(最短路径优先)D.LSU(链路状态更新)●试题5下面有关边界网关协议BGP4的描述中,不正确的是(40)。
(40)A.BGP4网关向对等实体(Peer)发布可以到达的AS列表B.BGP4网关采用逐跳路由(hop-by-hop)模式发布自己使用的路由信息C.BGP4可以通过路由汇聚功能形成超级网络(Supernet)D.BGP4报文直接封装在IP数据报中传送●试题6 在 RIP 协议中,默认的路由更新周期是(36)秒。
(36)A.30 B.60 C.90 D.100●试题7在距离矢量路由协议中,可以使用多种方法防止路由循环,以下选项中,不属于这些方法的是(37)。
(37)A.垂直翻转(flip vertical) B.水平分裂(split horizon)C.反向路由中毒(poison reverse) D.设置最大度量值(metric infinity)●试题8关于外部网关协议 BGP ,以下选项中,不正确的是(38)。
距离矢量协议和链路状态协议的区别

距离矢量协议和链路状态协议的区别一.什么是距离向量路由协议以及什么是链接状态路由协议?(1.)这类协议使用贝尔曼-福特算法(Bellma n-Ford)计算路径。
在距离-矢量路由协议中,每个路由器并不了解整个网络的拓扑信息。
它们只是向其它路由器通告自己的距离、也从其它路由器那里收到类似的通告。
(如果在90秒内没有收到相邻站点发送的路由选择表更新,它才认为相邻站点不可达。
每隔30秒,距离向量路由协议就要向相邻站点发送整个路由选择表,使相邻站点的路由选择表得到更新。
这样,它就能从别的站点(直接相连的或其他方式连接的)收集一个网络的列表,以便进行路由选择。
距离向量路由协议使用跳数作为度量值,来计算到达目的地要经过的路由器数。
)每个路由器都通过这种路由通告来传播它的路由表。
在之后的通告周期中,各路由器仅通告其路由表的变更。
该过程持续至所有路由器的路由表都收敛至一稳定状态为止。
这类协议具有收敛缓慢的缺点,然而,它们通常容易处理且非常适合小型网络。
距离-矢量路由协议的一些例子包括:路由信息协议(RIP)内部网关路由协议(IGRP)(2.)链接状态路由协议更适合大型网络,但由于它的复杂性,使得路由器需要更多的C P U资源。
在链路状态路由协议中,每个节点都知晓整个网络的拓扑信息。
各节点使用自己了解的网络拓扑情况来各自独立地对网络中每个可能的目的地址计算出其最佳的转发地址(下一跳)。
所有最佳转发地址汇集到一起构成该节点的完整路由表。
与距离-矢量路由协议使用的那种每个节点与其相邻节点分享自己的路由表的工作方式不同,链路状态路由协议的工作方式是节点间仅传播用于构造网络连通图所需的信息。
最初创建这类协议就是为了解决距离-矢量路由协议收敛缓慢的缺点,然而,为此链路状态路由协议会消耗大量的内存与处理器能力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
距离矢量协议和链路状态协议的区别
一.什么是距离向量路由协议以及什么是链接状态路由协议?
(1.)这类协议使用贝尔曼-福特算法(Bellman-Ford)计算路径。
在距离-矢量路由协议中,每个路由器并不了解整个网络的拓扑信息。
它们只是向其它路由器通告自己的距离、也从其它路由器那里收到类似的通告。
(如果在90秒内没有收到相邻站点发送的路由选择表更新,它才认为相邻站点不可达。
每隔30秒,距离向量路由协议就要向相邻站点发送整个路由选择表,使相邻站点的路由选择表得到更新。
这样,它就能从别的站点(直接相连的或其他方式连接的)收集一个网络的列表,以便进行路由选择。
距离向量路由协议使用跳数作为度量值,来计算到达目的地要经过的路由器数。
)
每个路由器都通过这种路由通告来传播它的路由表。
在之后的通告周期中,各路由器仅通告其路由表的变更。
该过程持续至所有路由器的路由表都收敛至一稳定状态为止。
这类协议具有收敛缓慢的缺点,然而,它们通常容易处理且非常适合小型网络。
距离-矢量路由协议的一些例子包括:路由信息协议(RIP)内部网关路由协议(IGRP)
(2.)链接状态路由协议更适合大型网络,但由于它的复杂性,使得路由器需要更多的C P U资源。
在链路状态路由协议中,每个节点都知晓整个网络的拓扑信息。
各节点使用自己了解的网络拓扑情况来各自独立地对网络中每个可能的目的地址计算出其最佳的转发地址(下一跳)。
所有最佳转发地址汇集到一起构成该节点的完整路由表。
与距离-矢量路由协议使用的那种每个节点与其相邻节点分享自己的路由表的工作方式不同,链路状态路由协议的工作方式是节点间仅传播用于构造网络连通图所需的信息。
最初创建这类协议就是为了解决距离-矢量路由协议收敛缓慢的缺点,然而,为此链路状态路由协议会消耗大量的内存与处理器能力。
(它能够在更短的时间内发现已经断了的链路或新连接的路由器,使得协议的会聚时间比距离向量路由协议更短。
通常,在1 0秒钟之内没有收到邻站的H E L LO报文,它就认为邻站已不可达。
一个链接状态路由器向它的邻站发送更新报文,通知它所知道的所有链路。
它确定最优路径的度量值是一个数值代价,这个代价的值一般由链路的带宽决定。
具有最小代价的链路被认为是最优的。
在最短路径优先算法中,最大可能代价的值几乎可以是无限的。
)
如果网络没有发生任何变化,路由器只要周期性地将没有更新的路由选择表进行刷新就可以了(周期的长短可以从3 0分钟到2个小时)。
链路状态路由协议的例子有:开放式最短路径优先协议(OSPF),中间系统到中间系统路由交换协议(IS-IS)
二.具体理解链路状态和距离矢量路由协议
距离矢量(DV)是“传说的路由”,A发路由信息给B,B加上自己的度量值又发给C,路由表里的条目是听来的,虽说“兼听则明,偏信则暗”,但是选出最优路径的同时会引发环路问题,当然,DV协议也使用水平分割,毒性逆转,触发更新等特性来避免,无奈的是,
这种问题对于竞争对手LS而言是天生免疫的。
链路状态(LS)是“传信的路由”,A将信息放在一封信里发给B,B对其不做任何改变,拷贝下来,并将自己的信息放在另一封信里,两封信一起给C,这样,信息没有任何改变和丢失,最后所有路由器都收到相同的一堆信,这一堆信就是LSDB。
然后,每个路由器运用相同的SPF算法,以自己为根,计算出SPF Tree(即到达目的地的各个方案),选出最佳路径,放入转发数据库中(即路由表)。
链路状态协议有三样看家本领:LSDB,SPF算法,SPF Tree。
还有三张表:邻居表,拓扑表,路由表,但这三张表并不是DV和LS的根本区别,EIGRP作为高级的距离矢量路由协议同样有这三张表,关键点在于表的内容和传递信息的过程。
DV的拓扑表事实上是邻居通告的路由条目的集合,依据算法从中选出最佳的放进路由表,它并不完全了解网络拓扑;而LS的拓扑表是真正意义上的网络拓扑,路由器对网络信息完全了解,所以可以独立的做出决策,确定最佳路由。
举例来说,如果我是DV的思维,我从华师去火车东站,通过询问知道,我可以在走到师大暨大车站坐515路车,也可以走到坐177路车,这样问下来有几种方案,我再选一个最优的,以这样的方式我就知道广州市内的一些地方该怎么去;而如果我是LS的思维,我会先去四下打听,搜集信息然后汇总成一张广州市区的地图,然后依据这张地图自己决定如何去火车东站以及其它地方。
路由过滤器对DV和LS的影响也是不同的。
运行DV的路由器基于自身的路由表来通告路由信息,其结果是路由过滤器将会对通告产生影响。
运行LS的路由器是基于自身的链路状态数据库来计算出自己的路由,路由过滤器对两路状态的通告和链路状态数据库没有影响,所以只会影响本路由器的路由表的安装,正是因为这种特性,路由过滤器主要被用在进入链路状态域的重新分配点上,即在ASBR执行重发布时,控制那些要进入或离开的路由.
-------------------------------------------------------------------
所以我们总结一下链路状态选择协议的优缺点如下:
链路状态路由选择的优点:
1.收敛速度快:触发更新在每个路由器上进行
2.没有路由环路:才用SPF算法
3.分等级设计网络和路由,更合理的利用网络资源
4.和距离矢量路由协议相比,链路状态路由协议的故障排除更为复杂
链路状态路由选择的缺点:
1.占用系统和网络资源:
a.对处理器和内存的要求高
b.第一次链路状态信息交换使用泛洪方式
2.设计复杂:需要遵循严谨的区域划分原则
3.配置可能比较复杂:设计多区域链路状态路由选择时,配置有时可能比较复杂
三.距离矢量和链路状态路由选择协议的比较
四.两者的区别
1. 距离矢量路由协议,更新的是“路由条目”!一条重要的链路如果发生变化,意味着需通告多条涉及到的路由条目!
链路状态路由协议,更新的是“拓扑”!每台路由器上都有完全相同的拓扑,他们各自分别进行SPF算法,计算出路由条目!一条重要链路的变化,不必再发送所有被波及的路由条目,只需发送一条链路通告,告知其它路由器本链路发生故障即可。
其它路由器会根据链路状态,改变自已的拓扑数据库,重新计算路由条目
2. 距离矢量路由协议发送周期性更新、完整路由表更新(periodic & full)
链路状态路由协议更新是非周期性的(nonperiodic),部分的(partial),有边界的
3.距离矢量路由协议由条数来决定最佳路径(RIP),IGRP,EIGRP使用符合度量值
链路状态路由协议使用复杂的带宽分析,综合决定最佳路径
4.距离矢量:运行距离矢量路由协议的路由器,会将所有它知道的路由信息与邻居共享,但是只与直连邻居共享!
链路状态:运行链路状态路由协议的路由器,只将它所直连的链路状态与邻居共享,这个邻居是指一个域内(domain),或一个区域内(area)的所有路由器!
5.所有距离矢量路由协议均使用Bellman-Ford(Ford-Fulkerson)算法,容易产生路由环路(loop)和计数到无穷大(counting to infinity)的问题。
因此它们必须结合一些防环机制:
split-horizon
route poisoning
poison reverse
hold-down timer
trigger updates
同时由于每台路由器都必须在将从邻居学到的路由转发给其它路由器之前,运行路由算法,所以网络的规模越大,其收敛速度越慢。
链路状态路由协议均使用了强健的SPF算法,如OSPF的dijkstra,不易产生路由环路,或是一些错误的路由信息。
路由器在转发链路状态包时(描述链路状态、拓扑变化的包),没必要首先进行路由运算,再给邻居进行发送,从而加快了网络的收敛速度。
(本资料素材和资料部分来自网络,仅供参考。
请预览后才下载,期待您的好评与关注!)。