基于单片机的步进电机控制系统的设计
基于单片机的步进电机控制器设计
基于单片机的步进电机控制器设计步进电机是一种可实现精确控制和定位的电动机,广泛应用于机械和自动化领域。
为了更好地控制步进电机,可以设计一个基于单片机的步进电机控制器。
本文将从步进电机的基本原理、常见控制方式、单片机的选择、电路设计和程序编写等方面进行详细介绍,共计超过1200字。
第一部分:步进电机的基本原理步进电机主要由定子和转子组成,通过电磁原理可以实现精确控制和定位。
步进电机根据工作方式的不同分为全步进电机和半步进电机,全步进电机每次步进一个固定的角度,而半步进电机每次步进一个更小的角度。
第二部分:常见的步进电机控制方式步进电机的控制方式有多种,其中最常见的控制方式是脉冲方向控制和脉冲加减速控制。
脉冲方向控制方式通过给步进电机控制信号的脉冲数和方向来实现电机转动,脉冲加减速控制方式则通过改变脉冲的频率和加减速度来控制电机的转速和位置。
第三部分:单片机的选择在设计步进电机控制器时,需要选择适合的单片机来实现控制逻辑和信号的生成。
常见的单片机有51系列、AVR系列、ARM Cortex-M系列等。
选择单片机时需要考虑其运算速度、存储容量、IO口数量等因素,以满足步进电机控制的要求。
第四部分:电路设计步进电机控制器的电路设计包括电机驱动电路和控制电路。
其中电机驱动电路用于提供适当的电流和电压给步进电机,以实现其运转。
可以选择使用电流驱动器芯片或者使用MOSFET等器件设计电路。
控制电路主要包括单片机和其他外围电路,用于生成控制信号和接收输入信号。
第五部分:程序编写步进电机控制器的程序需要实现控制逻辑和信号的生成。
程序可以使用C语言或者汇编语言进行编写,通过单片机的GPIO口和定时器等模块来生成适当的脉冲信号和控制信号,驱动步进电机实现转动和定位。
综上所述,基于单片机的步进电机控制器设计涉及到步进电机的基本原理、常见的控制方式、单片机的选择、电路设计和程序编写等多个方面。
通过合理的设计和实现,可以实现对步进电机的精确控制和定位,为机械和自动化领域的应用提供便利。
基于单片机步进电机控制系统设计--毕业设计
西南科技大学毕业设计计算说明书题目:基于单片机的步进电动机控制系统设计专业:机械制造与自动化姓名:郭富仙指导教师:朱敏二零一二年十二月目录第一章绪论1.1 课题研究的目的和意义1.2 国内外研究概况1.3 论文的主要研究内容第二章步进电机与单片机简介2.1 步进电机介绍2.1.1 步进电机概述2.1.2 步进电机的工作原理2.1.3 步进电机的分类与选择2.2 步进电机驱动系统介绍2.2.1 步进电机驱动系统简介2.2.2 步进电机绕组的电气特性2.3 单片机原理2.3.1单片机原理概述2.3.2单片机的应用系统2.3.3 AT89C51简介第三章3.1 系统整图3.2 电源部分3.3 按键部分3.4 驱动部分3.5 状态指示部分3.6 时钟部分第4四章系统软件设计4.1 系统开发软硬件环境4.2 系统主程序4.3 查键部分4.4 前进部分4.5 后退部分4.6 加速部分4.7 减速部分第五章系统的调试与检测295.1程序编译时的错误与解决方法5.2 LM7812输出电压错误与解决方法5.3 步进电机转动错误及解决方法5.4 结论与展望参考文献30附录31附录1:源程序清单简介【摘要】:步进电动机由于用其组成的开环系统既简单、廉价,又非常可行,因此在打印机等办公自动化设备以及各种控制装置等众多领域有着极其广泛的应用。
本文介绍的是一种基于单片机的步进电机的系统设计,用汇编语言编写出电机的正转、反转、加速、减速、停止程序,通过单片机、电机的驱动芯片ULN2004以及相应的按键实现以上功能,并且步进电机的工作状态要用相应的发光二极管显示出来。
本文内容介绍了步进电机以及单片机原理、该系统的硬件电路、程序组成,同时对软、硬件进行了调试,同时介绍了调试过程中出现的问题以及解决问题的方法。
该设计具有思路明确、可靠性高、稳定性强等特点,通过调试实现了上述功能。
【关键词】:步进电机;脉宽调制;驱动机构;单片机;转动序言步进电机作为执行元件,是机电一体化的关键产品之一,广泛应用在各种自动化控制系统中。
基于单片机的步进电机控制系统设计方案

D10-基于单片机旳步进电机控制系统一、理解什么是步进电机以及其工作原理步进电机是数字控制电机,步进电机旳运转是由电脉冲信号控制旳,其角位移量或线位移量与脉冲数成正比,每个一种脉冲,步进电机就转动一种角度(不距角)或前进、倒退一步。
步进电机旋转旳角度由输入旳电脉冲数确定,因此,也有人称步进电机为数字/角度转换器。
步进电机旳各相绕组按合适旳时序通电,就能使步进电机转动。
当某一相绕组通电时,对应旳磁极产生磁场,并与转子形成磁路,这时,假如定子和转子旳小齿没有对齐,在磁场旳作用下,由于磁通具有力图走磁阻最小途径旳特点,则转子将转动一定旳角度,使转子与定子旳齿互相对齐,由此可见,错齿是促使电机旋转旳原因。
二、步进电机旳特点(1)步进电机旳角位移与输入脉冲数严格成正比,因此当它转一转后,没有合计误差,具有良好旳跟随性。
(2)由步进电机与驱动电路构成旳开环数控系统,既非常以便、廉价,也非常可靠。
同步,它也可以有角度反馈环节构成高性能旳闭环数控系统。
(3)步进电机旳动态响应快,易于启停、正反转及变速。
(4)速度可在相称宽旳范围内平滑调整,低速下仍能保证获得很大旳转矩,因此一般可以不用减速器而直接驱动负载。
(5)步进电机只能通过脉冲电源供电才能运行,它不能直接用交流电源或直流电源。
(6)步进电机自身旳噪声和振动比较大,带惯性负载旳能力强。
三、步进电机旳控制步进电机旳控制重要包括换相次序旳控制、速度控制、速度控制、加减速控制等,控制系统就是运用单片机旳功能实现以上控制旳系统,即本次设计旳目旳。
四、示意图五、硬件设计计划本设计旳硬件电路只要包括控制电路、最小系统、驱动电路、显示电路四大部分。
最小系统只要是为了使单片机正常工作。
控制电路只要由开关和按键构成,由操作者根据对应旳工作需要进行操作。
显示电路重要是为了显示电机旳工作状态和转速。
驱动电路重要是对单片机输出旳脉冲进行功率放大,从而驱动电机转动。
(1)控制电路根据步进电机旳工作原理可以懂得,步进电机转速旳控制重要是通过控制通入电机旳脉冲频率,从而控制电机旳转速。
基于单片机的步进电机控制电路设计

基于单片机的步进电机控制电路设计
步进电机是一种应用广泛的电机,它的控制方式是通过逐步改变电流来驱动电机转动。
基于单片机的步进电机控制电路设计可以使步进电机的控制更加精确、方便和自动化。
下面将介绍一下如何设计一台基于单片机的步进电机控制电路。
首先,我们需要选择合适的单片机。
对于步进电机控制,需要一个I/O口数目足够的单片机,并且要求计算速度快、性能稳定。
常用的单片机有AT89C51、AVR、PIC、STM32等,其
中STM32拥有强大的计算能力和外设支持,非常适合用于步
进电机控制电路的设计。
接下来,我们需要考虑步进电机的驱动方式。
步进电机可以采用全步进或半步进两种方式驱动。
全步进控制方式会让电机一步步转动,步距为180度,转速慢但精确度高,而半步进控制方式可以让电机先半步,再进入全步进控制,提高了转速同时又保持了较高的精度。
最后,我们需要设计电路连接和代码编写。
在电路连接方面,需要将单片机输出引脚和驱动芯片的控制引脚相连,同时将驱动芯片输出端和电机的相应引脚相连。
在代码编写方面,需要根据所选单片机的指令集来编写步进电机控制引脚输出的程序,实现步进电机转速和方向的控制。
综上所述,基于单片机的步进电机控制电路设计需要选取合适的单片机,选择合适的步进电机驱动方式,并根据电路连接和
代码编写来实现电机的精确控制。
这样设计出的步进电机控制电路可以应用于各种机械设备控制,使之更加智能化和自动化。
基于单片机的步进电机控制系统实用设计
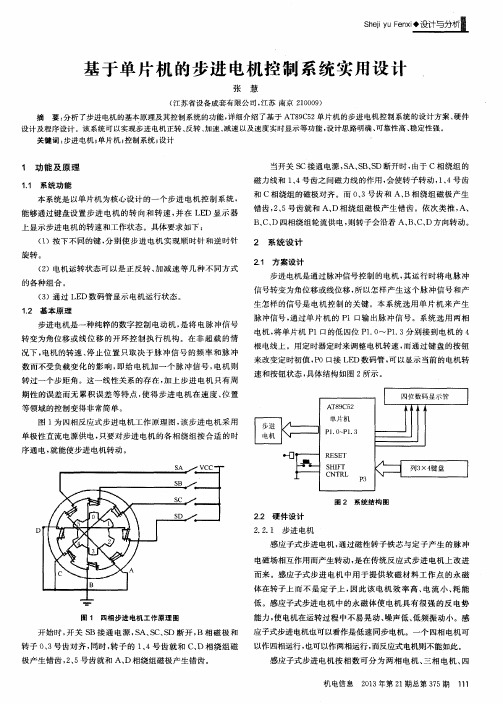
数 而不受负载变 化的影 响 , 即给 电机 加一个 脉 冲信号 , 电机 则
转 过 一 个 步 距 角 。这 一 线 性 关 系 的 存 在 , 加 上 步 进 电 机 只有 周
来改变定 时初值 , P O口接 L E D数码管 , 可 以显示 当前的电机转 速和按钮状态 , 具体 结构 如图 2 所示 。
当开 关 S C接 通 电 源 , S A、 S B 、 S D断开时 , 由于 C相 绕 组 的 磁力线和 1 、 4号 齿 之 间 磁力 线 的作 用 , 会使转子转动 , 1 、 4 号 齿 和 C相 绕 组 的磁 极 对 齐 。 而 0 、 3号齿 和 A、 B相 绕 组 磁 极 产 生
l 1 0 B Y G 和 国 内标 准 的 7 0 B YG、 9 0 B Y G、 1 3 O B YG等 。
能够通过键盘设置步 进 电机 的转 向和转 速 , 并在 L E D显 示器 上显示步进 电机的转速和工作状态。具体要求 如下 :
( 1 )按 下 不 同 的键 , 分 别 使 步 进 电机 实 现 顺 时针 和 逆 时 针 旋转 。
错齿 , 2 、 5 号齿就和 A、 D相绕组磁极 产生错齿 。依次类 推 , A、 B 、 C、 D 四相绕组 轮流供 电, 则转子会沿着 A、 B、 C、 D方向转动 。
转子 O 、 3号齿 对齐 , 同时 , 转 子的 1 、 4号齿 就和 C、 D相绕组磁
极产生错齿 , 2 、 5 号 齿 就 和 A、 D相绕组磁极产生错齿。
以作 四相运行 , 也可以作两相运行 , 而反应式电机则不能如此 。 感应子式步进 电机 按相数 可分为 两相 电机、 三相 电机 、 四
设计 及程 序设计 。该 系统 可 以实现 步进 电机 正转 、 反转 、 加速 、 减 速 以及 速度 实时 显示 等功 能 , 设计 思路 明确 、 可靠性 高 、 稳 定性 强 。 关键 词 : 步进 电机 ; 单片机; 控 制 系统 ; 设 计
基于51单片机的步进电机控制系统设计

基于51单片机的步进电机控制系统设计步进电机是一种特殊的直流电动机,具有定角度、定位置、高精度等特点,在许多领域得到广泛应用,如机械装置、仪器设备、医疗设备等。
本文将基于51单片机设计一个步进电机控制系统,主要包括硬件设计和软件设计两部分。
一、硬件设计步进电机控制系统的硬件设计主要包括51单片机、外部电源、步进电机驱动模块、以及其他辅助电路。
1.51单片机选择由于步进电机控制需要执行复杂的算法和时序控制,所以需要一个性能较高的单片机。
本设计选择51单片机作为主控芯片,因为51单片机具有丰富的外设接口、强大的计算能力和丰富的资源。
2.外部电源步进电机需要较高的电流供给,因此外部电源选择稳定的直流电源,能够提供足够的电流供电。
电源电压和电流的大小需要根据具体的步进电机来确定。
3.步进电机驱动模块步进电机驱动模块是连接步进电机和51单片机的关键部分,它负责将51单片机输出的脉冲信号转化为对步进电机的驱动信号,控制步进电机准确转动。
常用的步进电机驱动芯片有L297、ULN2003等。
4.其他辅助电路为了保证步进电机控制系统的稳定运行,还需要一些辅助电路,如限流电路、电源滤波电路、保护电路等。
这些电路的设计需要根据具体的应用来确定。
二、软件设计1.系统初始化系统初始化主要包括对51单片机进行外部中断、定时器、串口和IO 口等初始化设置。
根据实际需求还可以进行其他模块的初始化设置。
2.步进电机驱动程序步进电机的驱动程序主要通过脉冲信号来控制电机的转动。
脉冲信号的频率和脉冲宽度决定了电机的转速和运行方向。
脉冲信号可以通过定时器产生,也可以通过外部中断产生。
3.运动控制算法步进电机的运动控制可以采用开环控制或闭环控制。
开环控制简单,但无法保证运动的准确性和稳定性;闭环控制通过对电机转动的反馈信号进行处理来调整脉冲信号的生成,从而实现精确的运动控制。
4.其他功能设计根据具体的应用需求,可以加入其他功能设计,如速度控制、位置控制、加速度控制等。
基于51单片机的步进电机控制系统设计与实现

步进电机工作原理
步进电机是一种基于磁场的控制系统,工作原理是当电流通过定子绕组时,会 产生一个磁场,该磁场会吸引转子铁芯到相应的位置,从而产生一定的角位移。 步进电机的角位移量与输入的脉冲数量成正比,因此,通过控制输入的脉冲数 量和频率,可以实现精确的角位移和速度控制。同时,步进电机具有较高的分 辨率和灵敏度,可以满足各种高精度应用场景的需求。
二、系统设计
1、硬件设计
本系统主要包括51单片机、步进电机、驱动器、按键和LED显示等部分。其中, 51单片机负责接收按键输入并控制步进电机的运动;步进电机用于驱动负载运 动;驱动器负责将51单片机的输出信号放大,以驱动步进电机。LED显示用于 显示当前步进电机的状态。
2、软件设计
软件部分主要包括按键处理、步进电机控制和LED显示等模块。按键处理模块 负责接收用户输入,并根据输入控制步进电机的运动;步进电机控制模块根据 按键输入和当前步进电机的状态,计算出步进电机下一步的运动状态;LED显 示模块则负责实时更新LED显示。
三、系统实现
1、按键输入的实现
为了实现按键输入,我们需要在主程序中定义按键处理函数。当按键被按下时, 函数将读取按键的值,并将其存储在全局变量中。这样,主程序可以根据按键 的值来控制步进电机的转动。
2、显示输出的实现
为了实现显示输出,我们需要使用单片机的输出口来控制显示模块的输入。在 中断服务程序中,我们根据设定的值来更新显示模块的输出,以反映步进电机 的实时转动状态。
基于单片机的步进电机控制系统需要硬件部分主要包括单片机、步进电机、驱 动器、按键和显示模块等。其中,单片机作为系统的核心,负责处理按键输入、 控制步进电机转动以及显示输出等功能。步进电机选用四相八拍步进电机,驱 动器选择适合该电机的驱动器,按键用于输入设定值,显示模块用于显示当前 步进电机的转动状态。
基于单片机AT89C52的步进电机的控制器设计

基于单片机AT89C52的步进电机的控制器设计步进电机是一种非常常见的电机类型,由于其具有精准定位、适应高速运动以及控制简单等特点,被广泛应用于各种自动化设备中。
本文将从步进电机的工作原理、控制方式以及基于单片机AT89C52的步进电机控制器设计等方面展开阐述。
首先,我们来了解步进电机的工作原理。
步进电机是一种特殊的同步电动机,它具有内置的磁化轭,在没有外部励磁的情况下也能自动旋转。
步进电机的旋转是由控制电流方向和大小来实现的。
通常情况下,步进电机每转动一定角度,称为“步距角”,它可以是1.8度、0.9度、0.45度等,不同的步距角决定了电机的分辨率。
步进电机的控制方式主要有全步进和半步进两种。
全步进是指每次控制信号脉冲后,电机转动一个步距角。
而半步进则是在全步进基础上,在脉冲信号中引入一半步距角的微调。
控制信号脉冲可以是脉冲序列或者方波信号。
基于单片机AT89C52的步进电机控制器设计主要包括控制信号发生器的设计和步进电机驱动电路的设计。
控制信号发生器负责产生相应的控制信号脉冲,而步进电机驱动电路将这些脉冲信号转化为电流信号驱动步进电机。
控制信号发生器的设计可以采用定时器/计数器模块来实现。
AT89C52芯片具有可编程的定时器/计数器,可以用来产生控制信号的脉冲。
通过设置定时器的工作方式和计数值,可以实现不同频率、占空比的控制脉冲。
步进电机驱动电路的设计主要包括功率级驱动电路和电流控制电路。
功率级驱动电路负责将控制信号转化为足够大的电流驱动步进电机,通常采用功率放大器来实现。
电流控制电路则用来控制驱动电流的大小,使步进电机能够顺畅工作。
电流控制电路通常采用可调电阻、电流检测电阻和比较器等元件组成。
在步进电机控制器设计中,还需要考虑到步进电机的特性和应用需求。
例如,步进电机的电源电压、额定电流、阻抗、扭矩等参数需要与驱动电路匹配。
此外,还需要考虑到步进电机的机械结构、位置传感器、防重叠措施等因素。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
本科毕业设计基于单片机的步进电机控制系统的设计摘要随着自动控制系统的发展和对高精度控制的要求,步进电机在自动化控制中扮演着越来越重要的角色,区别于普通的直流电机和交流电机,步进电机可以对旋转角度和转动速度进行高精度控制。
步进电机作为控制执行元件,是机电一体化的关键组成之一,广泛应用在各种自动化控制系统和精密机械等领域。
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
本系统介绍了一种基于单片机的步进电机控制系统的设计,包括了硬件设计和软件设计两部分。
其中,硬件设计包括单片机最小系统、键盘控制模块、LCD显示模块、步进电机驱动模块、位置检测模块共5个功能模块的设计。
系统软件设计采用C语言编写,包括主程序、数字键处理程序、功能键处理程序、电机驱动处理程序、显示模块、位置采集模块。
本设计采用STC89C52单片机作为主控制器,4*4矩阵键盘作为输入,LCD1602液晶作为显示,ULN2003A芯片驱动步进电机。
系统具有良好的操作界面,键盘输入步进电机的运行距离;步进电机能以不同的速度运行,可以在不超过最大转速内准确运行到任意设定的位置,可调性较强;显示设定的运行距离和实际运行距离;方便操作者使用。
关键词:单片机步进电机液晶显示键盘驱动Design of the Stepping Motor Control System Based on SCMQiu Haizhao(College of Engineering, South China Agricultural University, Guangzhou 510642,China) Abstract:With the development of automatic control system and the requirements of high-precision control, stepping motor control in automation is playing an increasingly important role, different from the common DC and AC motor, stepper motor rotation angle and rotational speed can be high-precision controlled. Stepper motor as a control actuator is a key component of mechanical and electrical integration, widely used in a variety of automated control systems and precision machinery and other fields.Stepper motor is the open-loop control components changing electric pulse signals into angular displacement or linear displacement .In the case of non-overloaded, the motor speed, stop position depends only on the pulse frequency and pulse number, regardless of load changes, that is, to add a pulse motor, the motor is turned a step angle.This system introduces a design of stepper motor control system based on single chip microcomputer, including hardware design and software design in two parts. Among them, the hardware design, including single chip minimal system, keyboard control module, LCD display module, the stepper motor drive module, position detection module five functional modules. System software design using C language, including the main program, process number keys, the key of function processes, motor driver handler, the display module, position acquisition module.This design uses STC89C52 microcontroller as the main controller, 4 * 4 matrix keyboard as an input, LCD1602 LCD as a display, ULN2003A chip as stepper motor driver. System has a good user interface, keyboard input stepper motor running distance; Stepper motor can run at different speed, and run to any given position accurately in any speed without exceeding the maximum speed, with a strong adjustable ; Display the running distance and the actual running distance, which is more convenient for the operator to use.Key words: SCM stepper LCD keyboard driver目录1 前言...............................................................0籟丛妈羥为贍偾蛏练淨。
1.1 步进电机的发展 .................................................0預頌圣鉉儐歲龈讶骅籴。
1.2 设计要求 ........................................................0渗釤呛俨匀谔鱉调硯錦。
2 系统方案分析与选择论证 .........................................0铙誅卧泻噦圣骋贶頂廡。
2.1 步进电机的选择 .................................................0擁締凤袜备訊顎轮烂蔷。
2.2 步进电机驱动方案的选择 .......................................1贓熱俣阃歲匱阊邺镓騷。
2.3 显示方案的选择 .................................................2坛摶乡囂忏蒌鍥铃氈淚。
2.3 键盘方案的选择 .................................................2蜡變黲癟報伥铉锚鈰赘。
2.3 步进电机位置检测方案的选择...................................2買鲷鴯譖昙膚遙闫撷凄。
2.4 整体方案 ........................................................3綾镝鯛駕櫬鹕踪韦辚糴。
3 主要芯片介绍与硬件电路设计 ....................................3驅踬髏彦浃绥譎饴憂锦。
3.1 单片机最小系统模块 ............................................3猫虿驢绘燈鮒诛髅貺庑。
3.1.1 单片机介绍 ....................................................3锹籁饗迳琐筆襖鸥娅薔。
3.1.2 单片机最小系统 ...............................................4構氽頑黉碩饨荠龈话骛。
3.2 键盘电路设计 ...................................................5輒峄陽檉簖疖網儂號泶。
3.3 显示模块 ........................................................6尧侧閆繭絳闕绚勵蜆贅。
3.3.1 LCD1602介绍 .................................................6识饒鎂錕缢灩筧嚌俨淒。
3.3.2 LCD1602电路图...............................................7凍鈹鋨劳臘锴痫婦胫籴。
3.4 驱动模块 ........................................................8恥諤銪灭萦欢煬鞏鹜錦。
3.4.1 ULN2003A介绍 ...............................................8鯊腎鑰诎褳鉀沩懼統庫。
3.4.2 驱动电路图 ....................................................9硕癘鄴颃诌攆檸攜驤蔹。
3.5 位置检测模块 ...................................................9阌擻輳嬪諫迁择楨秘騖。
3.5.1 A3144E介绍...................................................9氬嚕躑竄贸恳彈瀘颔澩。
3.5.2 位置检测电路图 ..............................................11釷鹆資贏車贖孙滅獅赘。