动平衡剩余不平衡量计算
转子允许动不平衡量的计算

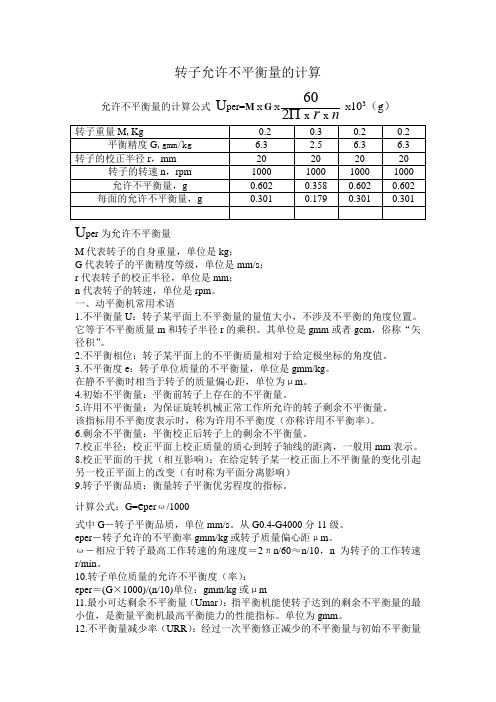
转子允许动不平衡量的计算允许不平衡量的计算公式 U per=M X G Xnr x x 260Π X 103(g )转子重量M,Kg0.2 0.3 0.2 0.2 平衡精度G ,gmm/kg6.3 2.5 6.3 6.3 转子的校正半径r ,mm20 20 20 20 转子的转速n ,rpm 1000 1000 1000 1000 允许不平衡量,g 0.602 0.358 0.602 0.602 每面的允许不平衡量,g 0.301 0.179 0.301 0.301U per 为允许不平衡量M 代表转子的自身重量,单位是kg ;G 代表转子的平衡精度等级,单位是mm/s ; r 代表转子的校正半径,单位是mm ; n 代表转子的转速,单位是rpm 。
一、动平衡机常用术语1.不平衡量U :转子某平面上不平衡量的量值大小,不涉及不平衡的角度位置。
它等于不平衡质量m 和转子半径r 的乘积。
其单位是gmm 或者gcm ,俗称“矢径积”。
2.不平衡相位:转子某平面上的不平衡质量相对于给定极坐标的角度值。
3.不平衡度e :转子单位质量的不平衡量,单位是gmm/kg 。
在静不平衡时相当于转子的质量偏心距,单位为µm 。
4.初始不平衡量:平衡前转子上存在的不平衡量。
5.许用不平衡量:为保证旋转机械正常工作所允许的转子剩余不平衡量。
该指标用不平衡度表示时,称为许用不平衡度(亦称许用不平衡率)。
6.剩余不平衡量:平衡校正后转子上的剩余不平衡量。
7.校正半径:校正平面上校正质量的质心到转子轴线的距离,一般用mm 表示。
8.校正平面的干扰(相互影响):在给定转子某一校正面上不平衡量的变化引起另一校正平面上的改变(有时称为平面分离影响)9.转子平衡品质:衡量转子平衡优劣程度的指标。
计算公式:G=e perω/1000式中G-转子平衡品质,单位mm/s。
从G0.4-G4000分11级。
eper-转子允许的不平衡率gmm/kg或转子质量偏心距µm。
转子允许不平衡量的计算

转子允许不平衡量的计算允许不平衡量的计算公式 U per=M X G Xnr x x 260X 103(g )U per 为允许不平衡量M 代表转子的自身重量,单位是kg ; G 代表转子的平衡精度等级,单位是mm/s ; r 代表转子的校正半径,单位是mm ; n 代表转子的转速,单位是rpm 。
一、动平衡机常用术语1.不平衡量U :转子某平面上不平衡量的量值大小,不涉及不平衡的角度位置。
它等于不平衡质量m 和转子半径r 的乘积。
其单位是gmm 或者gcm ,俗称“矢径积”。
2.不平衡相位:转子某平面上的不平衡质量相对于给定极坐标的角度值。
3.不平衡度e :转子单位质量的不平衡量,单位是gmm/kg 。
在静不平衡时相当于转子的质量偏心距,单位为μm 。
4.初始不平衡量:平衡前转子上存在的不平衡量。
5.许用不平衡量:为保证旋转机械正常工作所允许的转子剩余不平衡量。
该指标用不平衡度表示时,称为许用不平衡度(亦称许用不平衡率)。
6.剩余不平衡量:平衡校正后转子上的剩余不平衡量。
7.校正半径:校正平面上校正质量的质心到转子轴线的距离,一般用mm表示。
8.校正平面的干扰(相互影响):在给定转子某一校正面上不平衡量的变化引起另一校正平面上的改变(有时称为平面分离影响)9.转子平衡品质:衡量转子平衡优劣程度的指标。
计算公式:G=e perω/1000式中G-转子平衡品质,单位mm/s。
从G0.4-G4000分11级。
eper-转子允许的不平衡率gmm/kg或转子质量偏心距μm。
ω-相应于转子最高工作转速的角速度=2πn/60≈n/10,n为转子的工作转速r/min。
10.转子单位质量的允许不平衡度(率):eper=(G×1000)/(n/10)单位:gmm/kg或μm11.最小可达剩余不平衡量(Umar):指平衡机能使转子达到的剩余不平衡量的最小值,是衡量平衡机最高平衡能力的性能指标。
单位为gmm。
动平衡不平衡量计算公式
动平衡不平衡量计算公式
1.动态平衡的基本概念
动态平衡是指在自动控制系统中,利用外部输入(例如温度,湿度,压强,速度等)操纵内部参数(例如加热,冷却,调速等),保持系统运行于一个内部稳定状态,并具有良好的自动调节性能的过程或过程群。
当有恒定外部输入加以操纵时,动态平衡又称为自动平衡。
2.动态平衡的计算公式
动态平衡的计算公式是根据系统的输入-输出特性,利用状态反馈控制模型,利用拉普拉斯变换方法求解出系统的具体计算公式:若系统的输入与输出特性满足状态反馈形式:
y=G(s)x
其中,s为复变量,G(s)为传递函数,x为输入,y为输出,则应用Laplace变换,得到系统的动态平衡计算公式:
Y(s)=G(s)X(s)
其中,Y(s)为系统输出复变量,X(s)为系统输入复变量。
3.动态平衡的应用
动态平衡的应用非常广泛,可以用于控制计算机硬件装置、数据处理系统和各种机械系统的自动化控制。
动平衡计算公式

作转速
10 3)
克×毫米 许用不平衡量(g.mm) 1.181754 0.180544 19.82434005 0 0 0 0 0 0
克×毫米 工件质量kg 67.8 67.8 38 1038 1400 残余不平衡量g.mm 590.877 542.4 131.936 9912.170027 13300
许用不平衡度计算(许用质量偏心度) μ m 平衡等级 6.3 1.6 1.6 常数1 60 60 60 60 60 60 60 60 常数2 6.2831852 6.2831852 6.2831852 6.2831852 6.2831852 6.2831852 6.2831852 6.2831852 常数3 1000 1000 1000 1000 1000 1000 1000 1000
平衡量计算公式(N.m) 常数 1.5 1.5 许用动不平衡量(N/m) 1500 67.275
D辊直径 (N M ) 辊重量 V设计车速
造纸机资料介绍许用动不平衡量计算公式(N.m) 管辊的自重(N) 2500 138 管辊的直径(m) 300 156 设计车速(m/min) 1200 1200 动平衡品级 1.6 2.5
D辊直径 U 动平衡=1.5G平衡品质等级 G辊重量 (N M ) V设计车速
量偏心度) μ m 工作转速r/mm 3450 2200 800 许用不平衡度 17.43784624 6.94494309 19.0985935 #DIV/0! #DIV/0! #DIV/0! #DIV/0! #DIV/0!
残余不平衡量计算 克×毫米 常数 0.5 0.5 0.5 0.5 0.5 许用偏心距μ m 17.43 16 6.944 19.0985935 19 常数 0 0 0 0 0
动平衡报告

动平衡报告1. 动平衡测试基础1.1关于动平衡的“精度”目前国内基本上都采用“最小检测量”这一指标来表征动平衡机的“精度”即。
按部颁标准定义“最小检测量”的定义是:“对某一重量的校验转子,实验样机能够检测的最小偏心距,以表示,单位:微米()”。
(通常平衡行业将称为平衡精度,单位也有用“”表示的,换算方法即:)。
不平衡量计算公式式中e——平衡精度();m’——剩余不平衡量;r——矫正半径(mm);m——工件质量(kg)。
在选用动平衡机时,首先必须明确所需校验的转子的许用不平衡量e()多少。
也就是说,所用的动平衡机最小检测量即必须小于转子的许用不平衡量<e否则所选用的动平衡机的检测能力无法保证工件校验动平衡的要求。
转子的许用不平衡量e是设计者规定的。
如果有些工件在图样上未标明许用不平衡量的要求,选用动平衡机时,可参照国际标准ISO-1940推荐值确定。
1.2平衡工艺的设计原则在工艺图样上应该标明,转子应在什么情况下平衡(例如在套上滚珠轴承时)。
如果不能随意选择的话,那么校正半径和支撑面应该标会并注明尺寸,校正半径也应如此。
此外,有关校正方式、所采用的工具、校正存在的限制(例如最大许用孔深)以及每平面上的许用剩余不平衡均要扼要说明。
下列要素应当在规定有平衡公差要求的图样、技术规格卡或其他文件上加以说明:1) 每个校正平面上最大允许的剩余不平衡量;2) 校正平面的位置;3) 考虑所需要的转子强度和其他条件,说明在校正位置处能够可靠加或去除的最大质量及方法;4) 轴承的类型和他们在平衡机上的位置;5) 驱动方案;6) 平衡转速;1.3典型刚性转子的平衡精度等级平衡试验能改善旋转体质量分布,使转子在轴承旋转时没有不平衡离心力,当然这目的仅能达到一定的程度,经平衡后,转子将还会有剩余不平衡量,只不过是达到允许的范围罢了。
不平衡量必须减少到什么程度,如何协调经济上的合理性和技术上的可能性,在某些情况下,只能通过实验及大量的现场测试来确定。
转子允许不平衡量的计算
转子允许不平衡量的计算允许不平衡量的计算公式 U per=M X G Xnr x x 260X 103(g )U per 为允许不平衡量M 代表转子的自身重量,单位是kg ;G 代表转子的平衡精度等级,单位是mm/s ; r 代表转子的校正半径,单位是mm ; n 代表转子的转速,单位是rpm 。
一、动平衡机常用术语1.不平衡量U :转子某平面上不平衡量的量值大小,不涉及不平衡的角度位置。
它等于不平衡质量m 和转子半径r 的乘积。
其单位是gmm 或者gcm ,俗称“矢径积”。
2.不平衡相位:转子某平面上的不平衡质量相对于给定极坐标的角度值。
3.不平衡度e :转子单位质量的不平衡量,单位是gmm/kg 。
在静不平衡时相当于转子的质量偏心距,单位为μm 。
4.初始不平衡量:平衡前转子上存在的不平衡量。
5.许用不平衡量:为保证旋转机械正常工作所允许的转子剩余不平衡量。
该指标用不平衡度表示时,称为许用不平衡度(亦称许用不平衡率)。
6.剩余不平衡量:平衡校正后转子上的剩余不平衡量。
7.校正半径:校正平面上校正质量的质心到转子轴线的距离,一般用mm 表示。
8.校正平面的干扰(相互影响):在给定转子某一校正面上不平衡量的变化引起另一校正平面上的改变(有时称为平面分离影响) 9.转子平衡品质:衡量转子平衡优劣程度的指标。
计算公式:G=e per ω/1000式中G -转子平衡品质,单位mm/s 。
从G0.4-G4000分11级。
eper -转子允许的不平衡率gmm/kg 或转子质量偏心距μm 。
ω-相应于转子最高工作转速的角速度=2πn/60≈n/10,n 为转子的工作转速r/min 。
10.转子单位质量的允许不平衡度(率): eper =(G ×1000)/(n/10)单位:gmm/kg 或μm 11.最小可达剩余不平衡量(Umar ):指平衡机能使转子达到的剩余不平衡量的最小值,是衡量平衡机最高平衡能力的性能指标。
动平衡相关计算

不平衡量的简化计算公式 m=9549MG/rxn
M-转子质量 单位(Kg) G-精度等级选用 r-校正半径 单位(mm) n-工件的工作转速 单位(rpm) m-不平衡合格量 单位(g)
单侧重量:
备注:m为总不平衡量。
具体数据
M G r n m
N
S
S = 27.3 x 1/N
S - 跑偏(Run out) N - 工件的工作转速 单位(rpm) V1 - 适用等级的速度(mm/s) Run out N≤450 rpm, If (N≤450 rpm).S≤0.43 计算结果 输入数值 注意事项
计算结果 输入数值 注意事项
g/side
2585 2.5 170 579 626.947196
g/side = m/2
313.473598
跑偏(Run out)计算公式
BALANCING (动平衡等级及速度) 1.Q(等级)= 1.0 2.Q(等级) = 1.4 3.Q(等级)= 1.6 4.Q(等级)= 2.5 5.Q(等级)= 4.0 6.Q(等级) = 6.3 V1=2.8mm/second V1=2.8mm/second V1=2.8mm/second V1=4.5mm/second V1=7.1mm/second V1=11.2mm/second Smax.=0.17 Smax.=0.17 Smax.=0.17 Smax.=0.27 Smax.=0.43 Smax.=0.68 800 800 800 800 0.09555 0.1535625 0.2422875 0.3822
转子动平衡原理及计算
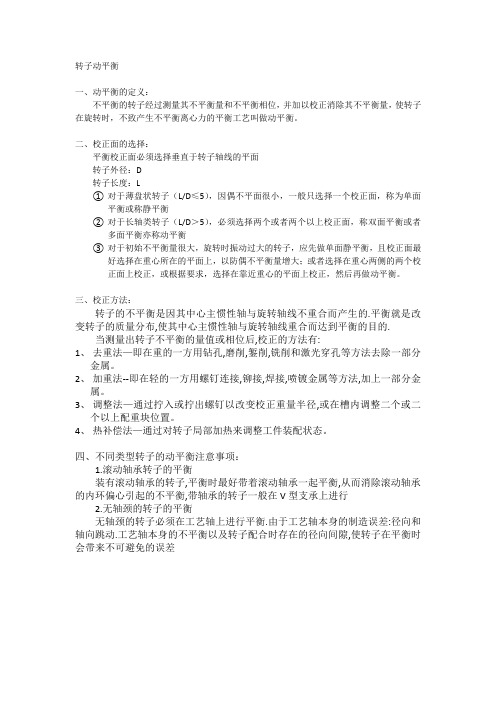
转子动平衡一、动平衡的定义:不平衡的转子经过测量其不平衡量和不平衡相位,并加以校正消除其不平衡量,使转子在旋转时,不致产生不平衡离心力的平衡工艺叫做动平衡。
二、校正面的选择:平衡校正面必须选择垂直于转子轴线的平面转子外径:D转子长度:L①对于薄盘状转子(L/D≤5),因偶不平面很小,一般只选择一个校正面,称为单面平衡或称静平衡②对于长轴类转子(L/D>5),必须选择两个或者两个以上校正面,称双面平衡或者多面平衡亦称动平衡③对于初始不平衡量很大,旋转时振动过大的转子,应先做单面静平衡,且校正面最好选择在重心所在的平面上,以防偶不平衡量增大;或者选择在重心两侧的两个校正面上校正,或根据要求,选择在靠近重心的平面上校正,然后再做动平衡。
三、校正方法:转子的不平衡是因其中心主惯性轴与旋转轴线不重合而产生的.平衡就是改变转子的质量分布,使其中心主惯性轴与旋转轴线重合而达到平衡的目的.当测量出转子不平衡的量值或相位后,校正的方法有:1、去重法—即在重的一方用钻孔,磨削,錾削,铣削和激光穿孔等方法去除一部分金属。
2、加重法--即在轻的一方用螺钉连接,铆接,焊接,喷镀金属等方法,加上一部分金属。
3、调整法—通过拧入或拧出螺钉以改变校正重量半径,或在槽内调整二个或二个以上配重块位置。
4、热补偿法—通过对转子局部加热来调整工件装配状态。
四、不同类型转子的动平衡注意事项:1.滚动轴承转子的平衡装有滚动轴承的转子,平衡时最好带着滚动轴承一起平衡,从而消除滚动轴承的内环偏心引起的不平衡,带轴承的转子一般在V型支承上进行2.无轴颈的转子的平衡无轴颈的转子必须在工艺轴上进行平衡.由于工艺轴本身的制造误差:径向和轴向跳动.工艺轴本身的不平衡以及转子配合时存在的径向间隙,使转子在平衡时会带来不可避免的误差五、转子不平衡量的计算方法:1、计算转子的允许不平衡度(率)Eper=(G*1000)/(n/10)式中:Eper——允许不平衡度单位μmG——不平衡精度等级一般取6.3n——工作转速单位r/min例如:某工件工作转速1400r/min平衡精度等级取6.3,则Eper=(GX1000)/(n/10)= (6.3X1000)/(1400/10)=45μm2、计算允许残余不平衡量m=(Eper*M)/(r*2)式中:m——允许残余不平衡度单位gM——工件旋转质量单位kgr——工件半径单位mm例如:工件质量20kg,半径60mm双面平衡,故计算每个平衡面的允许的剩余不平衡量为m=(Eper*M)/(r*2)=(45x20)/(60x2)=7.5g3、转子平衡品质——衡量转子平衡优劣程度的指标G=Eper*ω/1000式中:G——转子平衡品质mm/s 从G0.4-G4000分11级;Eper——转子允许的不平衡度g.mm/k 或mm/s或转子质量偏心距μmω——相应于转子最高工作转速的角速度ω=2πn/60≈n/104、最小可达剩余不平衡量(umar)——单位g.m,平衡机能使转子达到的剩余不平衡量的最小值,是衡量平衡机最高平衡能力的性能指标,当该指标用不平衡度表示时,称为最小可达或剩余不平衡度(单位g.mm/kg)5、不平衡量减少率(URR)——经过一次平衡校正所减少的不平衡量与初始不平衡量之比值,他是衡量平衡机效率的性能指标,以百分数表示:URR(%)=(U1-U2)/U1*100式中:U1为初始不平衡量;U2为一次平衡校正后的剩余不平衡量6、校验转子——为校验平衡机性能而设计的刚性转子,其质量、大小、尺寸均为有规定,分立式和卧式两种,立式转子质量为1.1、3.5、11、35、110kg,卧式转子质量为0.5、1.6、5、16、50、160、500kg7、不平衡国偶干扰比——单面平衡机抑制不平衡力偶影响的性能指标。