多旋翼无人机系统组成3
多旋翼无人机的组成
多旋翼无人机的组成
多旋翼无人机是一种通过多个旋翼提供升力和稳定性的飞行器。
它由多个旋翼、机身、电池、控制器和传感器等部件组成。
下面将介绍多旋翼无人机的组成结构及各部件的功能。
1. 旋翼:多旋翼无人机通常由四个以上的旋翼组成,常见的有四旋翼、六旋翼、八旋翼等。
旋翼通过快速旋转产生升力,控制旋翼的转速可以实现飞行高度和方向的调节。
2. 机身:机身是连接各个部件的主体,通常由轻质材料如碳纤维或铝合金制成,具有足够的强度和稳定性以支撑整个无人机的飞行。
3. 电池:电池是提供动力的重要部件,多旋翼无人机通常使用锂电池作为能源,电池的容量和电压会直接影响无人机的续航时间和飞行性能。
4. 控制器:控制器是多旋翼无人机的大脑,负责接收和处理传感器反馈的数据,控制旋翼的转速和姿态,以确保无人机的稳定飞行和精准操控。
5. 传感器:传感器包括陀螺仪、加速度计、罗盘等,通过感知飞行器的姿态、速度和方向等信息,传输给控制器进行实时调节,以保持飞行器的平衡和稳定。
6. 遥控器:遥控器是操作无人机的设备,通过遥控器上的摇杆、按
钮等控制无人机的起飞、降落、飞行方向和高度等动作。
多旋翼无人机的组成包括旋翼、机身、电池、控制器、传感器和遥控器等部件,每个部件都发挥着重要的作用,协同工作才能实现无人机的稳定飞行和精准操控。
随着技术的不断发展,多旋翼无人机在农业、航拍、物流等领域有着广泛的应用前景,相信未来会有更多创新的无人机设计和应用出现。
无人机概论(第2版)课件:无人机系统组成
无人机系统组成 多旋翼无人机机体结构
2. 机架 (3)碳纤维机架
16
无人机系统组成 多旋翼无人机机体结构
2. 机架 (3)碳纤维机架
17
无人机系统组成 多旋翼无人机机体结构
2. 机架 机架的主要作用 (1)提供安装接口。 (2)提供整体的稳定和坚固的平台。 (3)起落架等缓冲设备。 (4)保证足够低的重量。 (5)提供相应的保护装置。
2.如果按机翼弦平面有无上反角来分,可分为上反翼、无上反翼与下反翼三种类型。
14
无人机系统组成 多旋翼无人机机体结构
1.组成 多旋翼无人机组成一般包括机架起落架、电机和电调、电池、螺旋桨、 飞控系统、遥控装置、GPS模块、任务设备和数据链路。 2. 机架 机架按材质一般可以分为以下几种类型: (1)塑胶机架 主要特点是具有一定的刚度、强度和可弯曲度。 (2)玻璃纤维机架 主要特点是强度比较高,重量轻。 (3)碳纤维机架 其特点是价格要贵一些,但重量要轻一些。
22
无人机系统组成 多旋翼无人机布局
多旋翼按形状分为:十型,X型,H型,Y型,上下布局等等。 1.十字型布局 特点:十型多旋翼是最早出现的一种气动布局,只需改变少量电机转速 就可实现。 2.X型布局 特点:X型多旋翼是目前最常见的,相比于十型多旋翼,前后左右动作时 加减速的电机较多,控制比较迅速和有力。 3.H型布局 特点:其特点在于比较易于设计成水平折叠结构,看起来比X型厚重,又 拥有与X型相当的特点,结构简单,方便控制。
32
无人机系统组成 燃气涡轮发动机
2.涡轮喷气发动机 “涡喷”发动机是利用核心机出口燃气的可用能量,在发动机尾喷管中转变 成燃气的动能,以很高速度从喷口排出而产生推动力的一种涡轮发动机。 涡喷发动机转速高、推力大、直径小,主要适用于超音速飞行,缺点是耗油 率大,特别是低转速时更大,故经济性差。此外,由于排气速度大,噪声也 大。
多旋翼无人机系统的组成
池负责供电,机架将所有的零件固定在一起。 下面以大疆筋斗云DJI S1000+为例进行介绍。
1.机身和起落架 图2.3 DJI S1000+飞行器
机身由中心板、机臂(包含电机、电调和螺旋桨)、智能起 落架等组成。
图2.4 DJI S1000+飞行器中心板
• 专业多旋翼航拍飞行器的机身和起落架多 用强度高而重量轻的碳纤维复合材料制作。
• 无刷电机的一个重要参数是KV值,它是指电机 输入电压每提高1伏特,电机空载转速提高的 量。例如大疆的DJI 4114电机的KV值是 400prm/V,即说明电机空载情况下加1伏特电 压转速为每分钟400转,2伏特电压每分钟800 转,依此类推。同型号电机(比如都是4114)低 KV值比高KV值提供的扭力大,类似于汽车一挡 的速度虽然慢,但是爬坡更容易。但是低KV值 需要配大螺旋桨,如果搭配不合适会造成严重 的反扭现象。另外,像电机重量、最大拉力、 最大起飞重量等也是无刷电机重要参数。
• 外转子无刷电机的命名原则,各个厂家有所不同,有以电机定子的直 径和高度来命名,也有以电机的直径和高度来命名。多旋翼无人机所 用的电机大多都是以电机定子的直径与高度来命名。例如大疆的DJI 4114电机,指的是该电机定子直径41MM,定子高度14MM。
图2.7 DJI 4114电机和桨夹
图2.8 无刷电机定子和转子
图2.10 桨叶的剖面和飞机机翼的升 力原理
图2.11 两叶浆和三叶浆
• 螺旋桨有2、3或4个桨叶,一般桨叶数目越多吸收功率越大。多 旋翼飞行器的螺旋桨一般使用两叶浆,同电机类似,螺旋桨也 有如8045, 9047等4位数字标示,前面2位代表螺旋桨的直径,也 就是长度,单位是英寸。但是要注意,9047是直径9英寸螺旋浆, 而1045是直径10英寸螺旋浆。后面两位数是指几何螺距,螺距 原指螺纹上相邻两牙对应点之间的轴向距离,可以理解为螺丝 转动一圈前进的距离。而螺旋桨的螺距是螺旋桨在固体介质内 无摩擦旋转一周所前进的距离。简单来说可以理解为螺旋桨桨 叶的“倾斜度”,螺距标称越大倾斜度越大。螺旋桨长度和螺 距越大,所需要的电机或发动机级别就越大。螺旋桨的长度越 大,某种程度上能够保证飞机俯仰稳定性越高,螺距越大飞行 速度越快。四轴飞行器为了抵消螺旋桨的自旋,相邻的螺旋桨 旋转旋转的叫正桨(CW)、逆时针旋转的是反桨(CCW)。 安装的时候一定记得无论正反桨有字的一面是向上的。
多旋翼无人机基础知识二
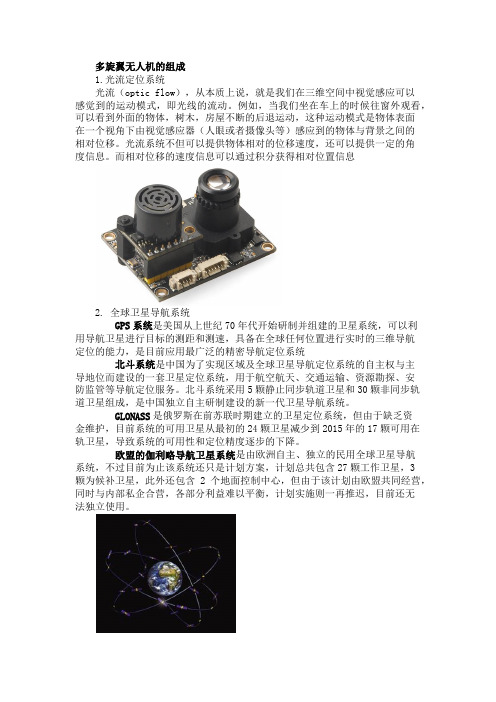
多旋翼无人机的组成1.光流定位系统光流(optic flow),从本质上说,就是我们在三维空间中视觉感应可以感觉到的运动模式,即光线的流动。
例如,当我们坐在车上的时候往窗外观看,可以看到外面的物体,树木,房屋不断的后退运动,这种运动模式是物体表面在一个视角下由视觉感应器(人眼或者摄像头等)感应到的物体与背景之间的相对位移。
光流系统不但可以提供物体相对的位移速度,还可以提供一定的角度信息。
而相对位移的速度信息可以通过积分获得相对位置信息2. 全球卫星导航系统GPS系统是美国从上世纪70年代开始研制并组建的卫星系统,可以利用导航卫星进行目标的测距和测速,具备在全球任何位置进行实时的三维导航定位的能力,是目前应用最广泛的精密导航定位系统北斗系统是中国为了实现区域及全球卫星导航定位系统的自主权与主导地位而建设的一套卫星定位系统,用于航空航天、交通运输、资源勘探、安防监管等导航定位服务。
北斗系统采用5颗静止同步轨道卫星和30颗非同步轨道卫星组成,是中国独立自主研制建设的新一代卫星导航系统。
GLONASS是俄罗斯在前苏联时期建立的卫星定位系统,但由于缺乏资金维护,目前系统的可用卫星从最初的24颗卫星减少到2015年的17颗可用在轨卫星,导致系统的可用性和定位精度逐步的下降。
欧盟的伽利略导航卫星系统是由欧洲自主、独立的民用全球卫星导航系统,不过目前为止该系统还只是计划方案,计划总共包含27颗工作卫星,3颗为候补卫星,此外还包含2个地面控制中心,但由于该计划由欧盟共同经营,同时与内部私企合营,各部分利益难以平衡,计划实施则一再推迟,目前还无法独立使用。
3.高度计由于全球定位系统GNSS的缺陷,它的高度信息极为不准确,通常偏差达几十米甚至更大,无人机系统的高度测量需要额外的设备来辅助测量。
常用的高度传感器主要包含超声波传感器和气压高度传感器,此外还有激光高度计和微波雷达高度计等。
气压高度计的原理是地球上测量的大气压力在一定方位内是与相对海拔高度呈现对应关系的。
多旋翼无人机的结构组成
多旋翼无人机的结构组成多旋翼无人机的结构组成多旋翼无人机是一种新型的无人机设备,由于其灵活多变的飞行方式,已经在军事、民用、科研等领域得到广泛的应用。
在这里,我们将从多旋翼无人机的结构组成方面进行介绍,以帮助大家更加了解这一设备。
一、框架结构框架结构是多旋翼无人机的骨架,其主要组成部分是底盘、支腿和中央马达支架等。
底盘是用于支撑无人机航空设备的主体部分,是多旋翼无人机的重要组成部分。
支腿主要用于支撑无人机的重量,使无人机能够稳定地静止在空中。
中央马达支架是用来安装电机的部件,电机负责驱动桨叶运转。
二、无人机外壳无人机外壳是多旋翼无人机的保护罩,其主要功能是保护无人机的内部部件,同时减少无人机在飞行过程中的阻力,提高空气动力学性能。
外壳的选材和加工工艺对多旋翼无人机的精度和稳定性有很大的影响。
目前,一般采用碳纤维、玻璃钢等材料来制造外壳。
三、主控制板主控制板是多旋翼无人机电路的核心,承载着多旋翼无人机的系统稳定性和性能。
它能够控制飞行器在空中的姿态、高度、飞行方向等。
通过与调速器、电机和遥控器等设备的配合工作,可以实现多旋翼无人机的安全起飞、飞行、降落等功能。
四、电机与电调电机与电调是多旋翼无人机的动力设备,负责产生推力、驱使桨叶旋转,从而实现多旋翼无人机在空中飞行的目的。
电调根据遥控器的指令调整电机的速度,以控制多旋翼无人机的飞行高度和方向。
不同类型的无人机需要不同数量和规格的电机和电调来完成权衡稳定性和飞行性能的设计。
五、传感器和控制器传感器和控制器是多旋翼无人机的智能设备。
传感器负责收集无人机周围的地面、空气、气压等信息,并将这些信息发送到控制器进行处理。
控制器根据这些信息来计算控制多旋翼无人机的姿态、高度、速度等参数,然后通过电机和电调来控制飞行器的方向和速度。
六、摄像头和图传设备摄像头和图传设备是多旋翼无人机的智能设备,可以对周围环境进行拍摄和图像传输。
典型的用途包括空中摄像和实时监控等。
无人机结构—无人机的基本结构

二、无人机的基本结构
3.多旋翼无人机的基本结构
2.动力装置 1)电池 主要为无人机提供能量,无人机多采用锂聚合物电池。 2)电调 (Electronic Speed Controller,ESC),全称电子调速器。它的主要功能是将飞控 板的控制信号进行功率放大,并向各开关管送去能使其饱和导通和可靠关断的驱动信号,以控制电动 机的转速;将电源电压转换为5V,为飞控板、遥控接收机供电;将直流电源转换为三相电源,为无 刷电机供电。 3)电机 带动浆叶旋转使多旋翼无人机产生升力,通过对各电机转速的控制,可使多旋翼无人 机完成飞行活动。 4)螺旋桨 旋转产生拉力或推力使无人机完成飞行活动。
二、无人机的基本结构
2)机架布局 常见的机架布局有X型、I型、 V型、Y型和IY型等
3.多旋翼无人机的基本结构
二、无人机的基本结构
3)机架轴距 轴距是机架最重要的数据指标,它 是指对角线两个电机或者桨叶中心的距 离,单位为毫米(mm) 四轴250:表示对角线电机中心的 距离为250毫米
3.多旋翼无人机的基本结构 四轴250
1.固定翼无人机的基本结构
4.起落装置 ♦功能:支撑无人机在地面上的活动, 包括起飞和着陆滑跑、滑行、停放。 ♦组成 支柱:起支撑作用并作为机轮的安装 基础。 减震器:吸收着陆和滑跑冲击能量 机轮:与地面接触支持无人机的重量, 减少无人机地面运动的阻力,可以吸收一 部分撞击动能有一定的减震作用 收放机构:用于收放起落架以及固定 支柱,飞行时可减少阻力
1.固定翼无人机的基本结构
1-接头;2-加强肋;3-翼梁;4-前墙; 5-蒙皮;6-后墙;7-翼肋;8-桁条
二、无人机的基本结构
2.机身 ♦功能 装载、安装基础。 ♦组成 蒙皮:与机翼蒙皮作用相似; 桁条:与机翼桁条作用相似; 桁梁:作用与翼梁相似; 隔框:作用与翼肋相似。
多旋翼无人机知识手册

[键入文字]V1.1版翎航智能科技工作室培训教材 多旋翼无人机知识手册前言随着多旋翼无人机的应用日趋广泛,多旋翼无人机的入门门槛越来越低,“到手飞”、个人航拍机等对操作人员的要求几乎是零,对毫无基本常识和经验的人来说也可以操作。
但这些都为人身和财产安全埋下了巨大的隐患,出于以上考虑,本教材阐述了多旋翼无人机的基本原理、总结了飞行过程中的注意事项、操作方法、以及如何规避风险。
这是一本适合飞行初学者的教材,旨在普及航空知识、和飞行常识等基本理论,根据经验提出在飞行中应该注意的问题和如何规避风险、应急处置等。
本教材的材料有些基于无人机方面的书籍,有些则基于航模飞行的经验,很多都是十分难得的第一手资料,因此可以作为飞行初学者的基础教程,也可以作为以拓宽知识面、开拓思路为主要目的的广大无人机爱好者的学习资料。
由于水平有限,时间仓促,书中疏漏之处在所难免,敬请读者朋友批评指正,以使我们在再版时修订。
作者目录前言................................................................................................... - 2 - 目录................................................................................................... - 3 - 第一章绪论 ....................................................................................... - 4 - 第二章系统组成及原理.................................................................... - 7 - 第三章飞行器 ................................................................................. - 18 - 第四章操作方法实例...................................................................... - 26 - 第五章其他细节 ............................................................................. - 45 - 第六章多旋翼无人机的作用与意义 .............................................. - 53 - 第七章与多旋翼无人机有关的航空法规及航空气象 ................... - 54 - 总结................................................................................................... - 66 - 参考文献 ........................................................................................... - 66 -第一章绪论关于无人机系统的发展历史在任何一本讲无人机的书里都有介绍,在这里不再重复。
露天煤场运用多旋翼无人机盘煤系统的研究与应用
露天煤场运用多旋翼无人机盘煤系统的研究与应用随着工业化和城市化的不断推进,能源需求量不断增加。
煤炭作为重要的能源资源,其开采和储存的安全和效率成为了一个亟待解决的问题。
露天煤场作为煤炭开采的主要方式之一,其运用多旋翼无人机盘煤系统可以提高煤炭生产的效率和安全性,实现数字化、智能化的矿区管理,为现代煤炭工业的发展提供可靠支撑。
一、多旋翼无人机盘煤系统的原理多旋翼无人机盘煤系统是指在煤炭生产中使用多旋翼无人机进行盘煤,减少人工和设备成本,提高盘煤效率。
多旋翼无人机盘煤系统主要由三部分组成:载体、姿态控制系统和数据传输系统。
载体为多旋翼无人机平台,采用四旋翼结构,依靠车载电源提供能源。
姿态控制系统包括传感器和控制器,用于实现无人机的稳定飞行和精确定位。
数据传输系统包括图像传输和数据备份,用于将无人机采集的煤堆信息实时传输至地面并进行数据处理,提供决策支持。
多旋翼无人机盘煤系统主要应用在露天煤场中,在以下几个方面具有重要作用:1. 盘煤效率提升传统盘煤方式需要大量的人工和机械设备,效率低下且易出现危险。
而多旋翼无人机在盘煤中具有调度灵活、响应迅速、准确稳定的优势,可以使盘煤效率提升20%以上。
2. 安全性提升煤炭开采过程中,由于地质条件、人员操作等原因往往存在很多安全隐患,如火灾、煤尘爆炸等。
而多旋翼无人机盘煤系统可以实现自动化盘煤,并在盘煤过程中实时监测煤堆周围环境变化,提供及时预警,降低事故发生率。
3. 矿区管理智能化多旋翼无人机盘煤系统采集的数据可以通过数据分析和人工智能技术加以处理,实现煤炭储存管理的数字化和自动化,提高矿区管理的智能化程度,为煤炭产业的可持续发展提供良好的数据支撑。
三、未来发展趋势1. 多旋翼无人机盘煤系统应用范围扩大,将不仅仅局限于露天煤场,还可适用于其他开采领域,如金属、盐矿等。
2. 盘煤效率不断提升,将达到更高的精度和速度,使得生产成本得到大幅压减。
3. 多旋翼无人机的应用将向智能化和自主化方向发展,例如结合机器视觉和神经网络技术,实现无人机的自主盘煤等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3.电调
电调的全称是电子调速器,针对电机不同可分为有刷电子调速器和无刷电子调速器,它根据控制信号调节电动机的转速。
无刷电调输入是直流,可以接稳
压电源,
或者锂电池。
一般的供电都在2-6节锂电池左右。
输出是三相脉动直流,直接与电机的三相输入端相连。
如果上电后,电机反转,只需要把这三根线中间的任意两根对换位置即可。
无刷电调有一对信号线连出,用来与飞控系统连接,控制电机的运转。
多旋翼无人机需要使用专用电调,以适应多轴快速反应。
无刷电调的主要参数有输入电压范围、输出持续电流和最大允许瞬时电流、兼容信号频率等。
多旋翼航拍无人机通常为11.1V—22.2V(3-6节锂电池)直流电压,持续电流20A—40A,兼容信号频率30-450 Hz。
一些通用型电调还带有BEC(battey elimination circuit免电池电路)输出,例如5V/2A,可以为飞控和遥控接收器等设备供电。
但是如果这些设备需要的供电电流大于BEC所能提供的电流,就需要专门的供电设备来供电。
大疆的DJI S1000+使用的是4114专用电调,工作电流40A,工作电压6S LiPo(6节锂电池),兼容信号频率30Hz-450Hz。
图2.9 DJI 4114专用电调。