RADARSAT-2雷达卫星数据D-InSAR处理报告
RADARSAT-2雷达卫星影像产品及其应用

RADARSAT-2卫星地面站(Ground Station)
全球共计24个RADARSAT-2地面接收站,覆盖全球大部分区 域,可快速接收卫星数据,并及时提供给用户
38
德清卫星地面接收站建设
拟接收半径2000km 将覆盖中国渤海、东 海、南海等重要海域及 中东部经济发达区域 同时兼顾海洋常规业 务监测及沉降农业应用 监测需求
36
RADARSAT-2雷达卫星的优势及改进
特 点 优 点 高分辨率模式 (最高为1米) 四极化模式 (HH+HV+VV+VH) 新增宽模式 左右视功能 近实时编程服务 (4-12小时) 近实时交付能力 (2-4小时) 对于小面积,更精细的目标检测、识别,可以获 取最大信息量。 改进地物识别、变化监测及分类的能力,在农作 物监测、林业等方面应用更为有效。 新增五种宽模式影像模式,单次成像面积增大, 对于大面积的监测更为有效。 提高了对目标区域的重访频率,提高了监测效率。 在应急响应事件中,尽可能快速的提供影像获取, 以满足处理紧急情况的需要。 数据接收后2-4小时可以交付产品,对于灾害监测 等突发事态处理有较好的帮助。
•
The arrows indicate the location of the river channels. The river channel in Area 1 is about 20 m wide, and the river channel in Area 2 is about 17 m wide.
35
RADARSAT-2雷达卫星相关
RADARSAT-1 1995年发射,于2013年4月进入安全模式。 在海洋、国土等领域持续发挥着重要作用。
RADARSAT-2 2007年发射,凭借其精准的轨道定位、优质的图 像质量及多种成像模式,在国土、农业、林业、海 洋、地质及水文等领域得到较为广泛的应用。 RADARSAT卫星星座 在RADARSAR-1和RADARSAT-2发展基础上开展 由三颗卫星组成,提供昼夜覆盖,大大缩短了重 访周期 ,极大地提高监测频率。
Radarsat卫星简介-新

Radarsat-2雷达卫星数据介绍一、卫星背景及情况简介Radarsat-2于2007年12月14日,在哈萨克斯坦的拜科努尔太空基地成功发射,是R-1的后续卫星,它除延续了R-1的拍摄能力外,在新的图像获取能力及性能方面,又有了长足的进展。
同时,它具备成熟的商业运作模式和实力雄厚的技术支撑团队,因此可以可靠地、保密地、及时地向商业用户提供高质量的SAR图像。
R-2作为世界上最先进的商业卫星,设计寿命是7年而预计可达12年。
相比R-1的设计,R-2更加灵活,可根据指令在左视和右视之间切换,这不仅缩短了重访周期,而且增加了获取立体成像的能力;而实施这种切换只是通过简单的滚动操作,约需10分钟就可以完成。
另外,对所有波束模式,都可以左视或右视。
除了重访间隔缩短,数据接收更有保证和图像处理更加快速外,R-2可以提供11种波束模式,包括2种高分辨率模式;三种极化模式、增宽的扫幅以及大容量的固态记录仪等。
这些都使R-2的运行更加灵活和便捷。
二、R-2卫星轨道参数及其性能特点1.基本轨道参数2.RADARSAT-2 卫星主要特点表2.1除了正常偏移外,RADARSAT-2 与RADARSAT-1 以相同的轨道飞行。
用轨道特征赤道48 °以北70°以北500公里幅宽模式重访周期太阳同步升交点周期倾角高度每2-3天每1-2天每天24天每天14个轨道18时(±15分)100.7分钟98.6度798公里三、RADARSAT-2 波束模式特征注:1、极化模式如下S=single,单极化HHSS=Select Single 可选单极化HH,VV,HV或者VHDual(双极化) HH&HV 或者VV&VHQuad(四极化) HH&HV&VV&VH2、上表中所列分辨率及扫幅宽都是标称值(实际上他们是随着入射角的变化而变化的)在下图中,列明了各种波束模式的成像示意图. R-2在20- 49°之间的侧视范围内,可以沿卫星飞行方向通过左视或者右视来获取图像,如图所示:四、RADARSAT-2卫星编程服务及其图像产品简介1、编程服务2、产品简介SLC含有幅度以及相位信息;数据作经过标定,坐标是斜距。
ds-insar技术原理 -回复
ds-insar技术原理-回复DSinsar技术原理DSinsar(Differential Synthetic Aperture Radar Interferometry)技术是一种利用合成孔径雷达干涉测量地表形变的技术。
它通过对空间两个或多个时刻的雷达影像进行差分处理,可以获取地表物体在两个时刻之间的形变情况。
DSinsar技术是精确、高效且不受受污染等因素影响的形变监测手段之一。
1. 合成孔径雷达(Synthetic Aperture Radar,SAR)技术简介合成孔径雷达是一种利用微波波段进行成像的无源遥感技术。
它通过发射连续波照射地表,接收地表反射回来的雷达信号,并通过波传动时间和波传动路径的变化来探测地表特征。
相比于光学遥感技术,SAR技术具有天气无关、可以在白天和夜晚进行观测等优势。
2. 干涉合成孔径雷达(Interferometric Synthetic Aperture Radar,InSAR)技术原理干涉合成孔径雷达技术是一种通过对两个或多个重复观测的雷达影像进行相位差分处理,获取地表形变信息的技术。
该技术利用雷达波传播过程中被地表物体散射的功用实现形变的测量,即通过监测两个或多个时刻地表的相位变化来获取地表的形变信息。
3. DSinsar技术原理DSinsar技术基于InSAR技术,通过对两个或多个时刻的雷达影像进行差分处理,可精确测量地表形变。
其核心思想是对多期SAR影像进行叠加和相位差分,得到相位差值。
这种差分处理的优势在于可以消除大部分卫星轨道和大气等方面的误差,从而获得较高的形变精度。
4. DSinsar技术步骤(1)数据获取:首先需要获取多期的SAR影像数据,通常需要考虑不同季节、不同天气等多个时刻的数据,以便对地表形变进行更全面的监测。
(2)数据预处理:对获取的SAR影像进行预处理,包括几何校正、辐射校正和滤波等步骤,以确保后续处理的准确性和可靠性。
(3)相位解缠:由于地表形变通常引起相位延迟,因此需要对相位进行解缠,以获取准确的相位差值。
国外相关星载SAR及InSAR卫星的系统参数
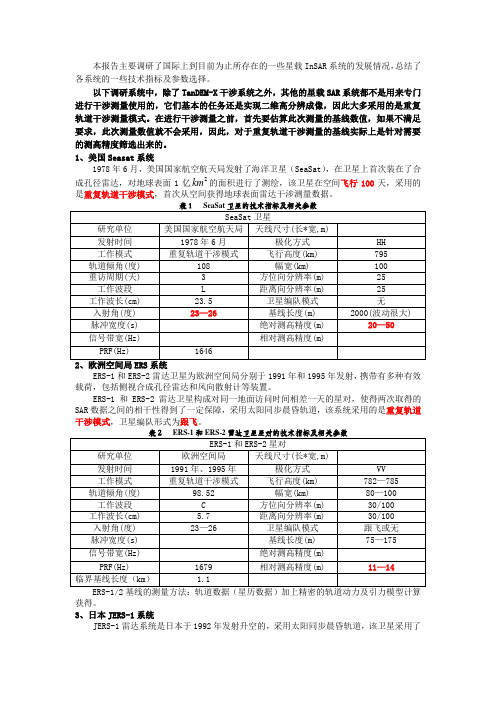
本报告主要调研了国际上到目前为止所存在的一些星载InSAR系统的发展情况,总结了各系统的一些技术指标及参数选择。
以下调研系统中,除了TanDEM-X干涉系统之外,其他的星载SAR系统都不是用来专门进行干涉测量使用的,它们基本的任务还是实现二维高分辨成像,因此大多采用的是重复轨道干涉测量模式。
在进行干涉测量之前,首先要估算此次测量的基线数值,如果不满足要求,此次测量数值就不会采用,因此,对于重复轨道干涉测量的基线实际上是针对需要的测高精度筛选出来的。
1、美国Seasat系统1978年6月,美国国家航空航天局发射了海洋卫星(SeaSat),在卫星上首次装在了合km的面积进行了测绘,该卫星在空间飞行100天,采用的成孔径雷达,对地球表面1亿2是重复轨道干涉模式,首次从空间获得地球表面雷达干涉测量数据。
ERS-1和ERS-2雷达卫星为欧洲空间局分别于1991年和1995年发射,携带有多种有效载荷,包括侧视合成孔径雷达和风向散射计等装置。
ERS-1和ERS-2雷达卫星构成对同一地面访问时间相差一天的星对,使得两次取得的SAR数据之间的相干性得到了一定保障,采用太阳同步晨昏轨道,该系统采用的是重复轨道干涉模式,卫星编队形式为跟飞。
获得。
3、日本JERS-1系统JERS-1雷达系统是日本于1992年发射升空的,采用太阳同步晨昏轨道,该卫星采用了重复轨道干涉模式,但其轨道控制方式不太理想,在交轨方向的基线分量不如日本之后发射的ALOS卫星。
表3中的基线长度是对JERS-1持续观测四年(1993年—1994年)期间的基线变化范围。
雷达卫星Radarsat除了有一个地面卫星数据接收站外,卫星上还载有磁带记录器,可覆盖全球。
该卫星除陆地及海洋应用外,其还肩负两个方面的重要任务:一是对南极大陆提供第一个完全的高分辨率卫星覆盖,二是对全球产生多次卫星覆盖。
Radarsat雷达卫星由加拿大于1995年11月4日发射,具有7种模式、25种波束及不同入射角,因而具有多种分辨率、不同幅宽和多种信息特征,使用于全球环境、土地利用和自然资源监测等。
RADARSAT-2 卫星雷达数据

一、卫星概要:RADARSAT-2是一颗搭载C波段传感器的高分辨率商用雷达卫星,由加拿大太空署与MDA公司合作,于2007年12月14日在哈萨克斯坦拜科努尔基地发射升空。
卫星设计寿命7年而预计使用寿命可达12年。
RADARSAT-2具有多种分辨率成像能力(最高分辨率可达1米),多种极化方式使用户选择更为灵活,根据指令进行左右视切换获取图像缩短了卫星的重访周期,增加了立体数据的获取能力。
另外,卫星具有强大的数据存储功能和高精度姿态测量及控制能力。
二、RADARSAT-2卫星特点1、多分辨率(最高分辨率可达1米)、多极化方式供客户选择。
2、高幅宽高性价比:在同等高分辨率模式下,RADARSAT-2覆盖的面积为商业SAR卫星中最大。
3、重访次数增加(左右视):对于需要较高重访频率去访问感兴趣区域( AOI)的运行性用户,提高了监测效率。
4、快速获取数据能力:提供客户编程、紧急编程多种选择,可实现近实时处理,数据接收后不到30分钟可处理完成。
5、星上存储能力增强:可以获取世界任何地方的数据后,到北京地面站进行回放下传。
三、基本参数RADARSAT-2卫星基本参数RADARSAT-2波速模式特征四、RADARSAT-2 雷达数据样片Radarsat-2雷达数据样片一Radarsat-2 雷达数据样片二Radarsat-2分辨率3米超精细模式极化方式HH Radarsat-2 雷达数据样片三Radarsat-2-1Radarsat-2 雷达数据样片四Radarsat-2-2我们是一家集遥感数据获取、深度加工、遥感信息提取及解译、行业应用、软件服务、解决方案为一体的股份制高新技术企业。
依托东盟和北部湾经济发展优势,服务辐射全国和越南、泰国、缅甸、印度尼西亚等东南亚国家。
在不断的发展过程中,企业始终专注于遥感技术的标准化、专业化、民用化服务,用遥感开阔眼界,让数据服务世界。
RADARSAT-2卫星影像数据介绍及 RADARSAT-2卫星影像价格

精细(Fine) 宽幅精细(Wide Fine)
标准(Standard) 宽(Wide)
分辨率 (m)
1 3 5 5
5
8 8 8 30 30
幅宽
(km*km )
18*8
20*20
50*50
50*50
价格(元)
58000 18000 37500 16500
90*50
单视复型产品(SLC,Single Look Complex),采用单视处理,保留了 SAR 相应信息,以 32 bit 复数形式记录图像数据。只有单波束模式 (除窄幅扫描和宽幅扫描外的其他成像模式,下同)的数据可以生成 SLC 产品。
SAR 地理参考精细分辨率产品(SGF,SAR Georeferenced Fine Resolution)。只有单波束模式的数据可以生成 SGF 产品。标准模式、 宽模式、超低和超高模式的产品输出像元大小为 12.5 米,精细模式的 产品输出像元大小为 6.25 米。图像数据为 16 bit 无符号整型。
SSG
在 SGF 产品的基础上进行了地图投影校正。只有单波束模式的数据可
以生成 SSG 产品。SSG 产品的图象数据为 16 bit 或 8 bit 无符号整型。
地理编码级
SAR 地理编码精校正产品(SPG,SAR Precision Geocoded),与 SSG
SPG
产品相仿,不同之处在于采用地面控制点对几何校正模型进行修正,
16500 16500 16500 16500 18000 35000 18000 35000
北京揽宇方圆信息技术有限公司
25
精细四极化(Fine Quad-Pol)
空间大地测量(sar和insar)
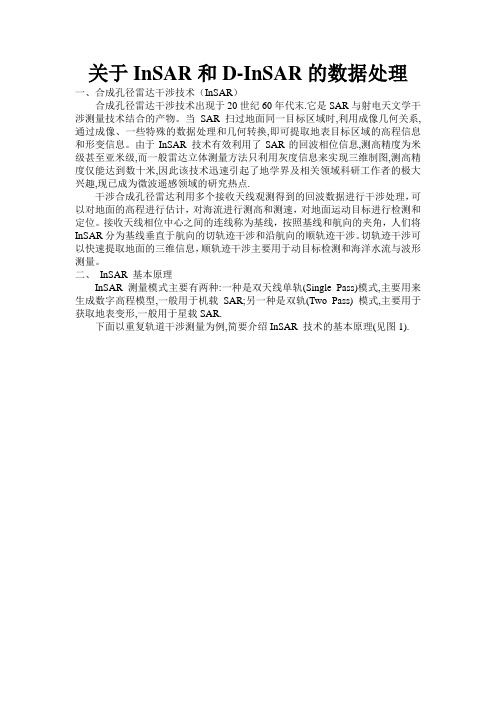
关于InSAR和D-InSAR的数据处理一、合成孔径雷达干涉技术(InSAR)合成孔径雷达干涉技术出现于20世纪60年代末.它是SAR与射电天文学干涉测量技术结合的产物。
当SAR扫过地面同一目标区域时,利用成像几何关系,通过成像、一些特殊的数据处理和几何转换,即可提取地表目标区域的高程信息和形变信息。
由于InSAR 技术有效利用了SAR的回波相位信息,测高精度为米级甚至亚米级,而一般雷达立体测量方法只利用灰度信息来实现三维制图,测高精度仅能达到数十米,因此该技术迅速引起了地学界及相关领域科研工作者的极大兴趣,现已成为微波遥感领域的研究热点.干涉合成孔径雷达利用多个接收天线观测得到的回波数据进行干涉处理,可以对地面的高程进行估计,对海流进行测高和测速,对地面运动目标进行检测和定位。
接收天线相位中心之间的连线称为基线,按照基线和航向的夹角,人们将InSAR分为基线垂直于航向的切轨迹干涉和沿航向的顺轨迹干涉。
切轨迹干涉可以快速提取地面的三维信息,顺轨迹干涉主要用于动目标检测和海洋水流与波形测量。
二、InSAR 基本原理InSAR 测量模式主要有两种:一种是双天线单轨(Single Pass)模式,主要用来生成数字高程模型,一般用于机载SAR;另一种是双轨(Two Pass) 模式,主要用于获取地表变形,一般用于星载SAR.下面以重复轨道干涉测量为例,简要介绍InSAR 技术的基本原理(见图1).假设卫星以一定的时间间隔和轨道偏离(通常为几十米到1km 左右)重复对某一区域成像,并在两次飞行过程中处于不同的空间位置1S 和2S ,则空间干涉基线向量为B,长度为B;基线向量B 与水平方向的夹角为基线倾角α。
1S 和2S 至地面点P 的斜距分别为R 和R+△R;将基线沿视线方向分解,得到平行于和垂直于视线向的分量||B 、'B ;H 为1S 到参考面的高度;从1S 发射波长为λ的信号经目标点P 反射后被1S 接收,得到测量相位1ϕ,114arg{}R u πϕλ=+(1)同样,另一空间位置2S 上测量到相位2ϕ,224()arg{}R R u πϕλ=+∆+(2)式中,arg{1u }和arg{2u }表示不同散射特性造成的随机相位.假设两幅图中随机相位的贡献相同,则1S 和2S 关于目标P 点的相位差124R πφϕϕλ=-=-∆(3) 也称为干涉相位,可由经过配准的两幅SAR SLC 图共扼相乘得到.根据图1中的几何关系并利用余弦定理可得: 222()sin()2R B R R RBθα+-+∆-=(4) cos h H R θ=-(5)由于R R ∆且R B ,则||sin()R B B θα∆≈-=(6) (4)、(5) 两式即为In SAR 确定高程的原理性公式.三、合成孔径雷达差分干涉测量(D-InSAR)D-InSAR 技术是在主动式微波合成孔径雷达 SAR 相干成像基础上发展起来的,它以合成孔径雷达复数据提供的相位信息为信息源,可从包含目标区域地形和形变等信息的一幅或多幅干涉纹图中提取地面目标的微小形变信息。
SAR数据介绍
Zondy SAR数据介绍本文对当前主要的SAR卫星和对应的数据做了一定的介绍,并且对当前平台上有的数据进行了一定的整理,不足之处希望修改。
Writer:Huang XiaodongDate:Jul-26-2010Email:**************目录ALOS (4)卫星介绍 (4)数据格式 (5)主要用途 (6)官方网址 (6)现有数据 (6)ERS1/2 (6)卫星介绍 (6)数据格式(CEOS) (7)主要用途 (7)官方网站 (7)现有数据 (7)Radarsat 1 (8)卫星介绍 (8)工作模式 (8)数据格式(CEOS) (9)主要用途 (9)官方网站 (9)现有数据 (9)Radarsat 2 (9)卫星介绍 (9)工作模式 (10)数据格式(*.tif) (10)主要用途 (10)官方网站 (10)现有数据 (10)Envisat-1 (11)卫星介绍 (11)ASAR工作模式 (11)ASAR产品介绍 (12)Level 0 产品 (12)Level 1B产品 (13)数据格式(*.N1) (13)主要用途 (14)官方网站 (15)现有数据 (15)TerraSAR-X and TanDEM-X (16)卫星介绍 (16)工作模式 (17)数据格式(SLC:*.cos;Other:*.tif) (17)主要用途 (18)官方网站 (18)现有数据 (18)COSMO-SkyMed (19)卫星介绍 (19)成像模式 (20)数据格式(*.HDF5) (20)主要用途 (20)官方网站 (20)现有数据 (21)JERS (21)卫星介绍 (21)数据格式(CEOS) (22)主要用途 (22)官方网站 (22)现有数据 (22)ALOS卫星介绍PALSAR(Phased Array type L-band Synthetic Aperture Radar) ,日本NASDA 机构于1993年开始了ALOS 卫星系统的概念性研究以及相应的遥感传感器制造和试验研究,直到2006 年1月24 日发射。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
相干系数 越大表示干涉图质量越高,条纹越清晰,相干系数接近于零时表示两期影像完
全失相干。
2.4 基线估计
平行基线和垂直基线分量的估计精度对平地相位的计算和地形相位的模拟至关重要, 地表微小形变的监测依赖于高精度的基线参数,而目前卫星系统提供的精密轨道信息精度 不高甚至没有提供精密轨道信息,导致基线的估计精度偏低,出现系统性误差;目前常用 的基线估计方法有轨道法、条纹频率法和基于地面控制点的基线精化估计等。
orb ,忽略atm 和 n 的影响,可以得到雷达视线方向上地面形变造成的相位。根据雷达视
线方向上地面形变造成的相位与地表沉降量 r 的关系,获取地表沉降量 r 。
def
-
4
r
前述分析表明,形变相位包含于干涉相位之中,要获取形变相位就必须从干涉相位中
除去平地相位、地形相位以及大气延迟和热噪声相位。
由前面原理可知,二轨法主要处理流程如图 3 所示,主要包括:主辅影像预处理、影 像配准及重采样、干涉图生成、滤波、地形相位差分、相位解缠、地理编码等。
2.1 主辅影像预处理
预处理包括主辅影像的读取、成像、轨道数据的读入及前置滤波等,前置滤波是指通 过带通滤波器将主辅影像的频谱非重叠部分滤除,在距离向和方位向分别进行,可以提高 后续配准精度。
号可用复数分别表示为:
S(R1) A(R1) exp(i (R1)) S(R2 ) A(R2 ) exp(i (R2 ))
(1-2)
其中,A(R1)、A(R2)为两回波的振幅,ψ(R1)、ψ(R2)
为回波相位。从式(1-2)可以看出,雷达回波的振幅与相位都是雷达天线到目标 P 的路
径的函数。雷达卫星以复数形式记录下回波信号并处理成影像,这种影像叫做 SAR 单视
息。
1.2 D-InSAR 基本原理
合成孔径差分干涉测量(D-InSAR)技术是 InSAR 技术的拓展,是以合成孔径雷达复 数数据提取的相位信息为信息源获取地表变化信息的一项技术。D-InSAR 技术利用同一地 区的两幅干涉图像,其中一幅是形变前的干涉图像,另一幅是形变后获取的干涉图像,地 表形变能导致雷达视线(LOS)向的距离变化,雷达视线(LOS)向的距离变化被记录于 干涉相位中,分析干涉相位,通过差分处理(除去参考椭球相位贡献和地形起伏对干涉相 位的影响)来获取地表形变信息。
2.6 差分图滤波
差分图中除形变相位外还含有大量的噪声,如系统热噪声、斑点噪声、去相干噪声、 差分残余及数据处理引入的噪声等,又呈现为随机性、系统性等不同特性,使形变相位受 到不同程度的污染,严重时足以淹没掉形变相位;常用的滤波算法可以归结为空域、频域 和时域三类,在形成干涉图前对 SLC 影像的距离向和方位向进行多视处理以提升干涉图 的信噪比、生成差分图后进行均值、中值、自适应等空域滤波;频域滤波为将差分图进行 快速傅里叶变换(FFT)在频域内根据噪声和信号的不同频谱特性进行滤波,如 Goldstein 方法、spectral 方法等;也可根据噪声和信号在时域上表现出来的不同相关特性进行噪声 的滤除,如时间域高通、低通滤波等。
将式(1-2)代入式(1-3)可得,干涉相位即为两回波信号相位之差:
(1- (R1) (R2)
4)
此处只取了记录的干涉相位的主值。
考虑到雷达成像的几何关系还有地物本身具有的后向散射特性,回波信号相位可表示
如下:
( R1 )
2
2
R 1 a r g {U 1}
(R2)
2
(R1)
(R2
)
4
(R1
R2
)
由上式可以得出,干涉相位是雷达天线与目标点的两次斜距之差的函数。
另外,根据图 1 的三角关系可推出以下关系:
(1-6)
R
R2
R1
B
sin(
)
B2 2R1
根据图 1 的成像几何关系结合余弦定理可得:
(1-7)
sin (R1 R)2 R2 B2
B∥ B sin( ) B B cos( )
(1-1)
通过对同一目标的重复观测,SAR 卫星天线就可得到同一
目标的两次回波信号。回波信号主要由两种信息组成:一是回波信号的强度信息,用于
SAR 的成像处理,可得到地面目标区域的二维图像;二是回波信号的相位信息,用于构建
目标的高度信息,它是干涉测量技术赖以实现的关键信息。根据波动方程,两次的回波信
r
c
tБайду номын сангаас
a
n
{
I[S R[S
1 ( R1 1 ( R1
)
S
* 2
)
S
* 2
(R2 (R2
)] )]
}
(1-3)
式中:arg 表示辐角;*表示复数的共轭;I 表示复数的虚部;R 为实部。从式(1-3) 可知,干涉相位φ的取值区间为[-π,π],是不足整周数的相位值,也称为相位主值或缠绕 值。当干涉相位以影像形式表现出来就称干涉图或干涉相位图。
2R1B
(1-8)
利用式(1-6)—(1-8),根据图 1 的成像几何关系,可推出目标点 P 的高程 H 与干涉
相位φ的函数关系如下:
h
H
R1 cos
H
2
B
2
-(
4
)2
cos
+2 B sin( )
(1-9)
根据上式,再结合卫星的轨道参数信息和影像的相位信息即可反演出地面点的高程信
2.3 干涉图生成
配准后的主从影像进行复共轭相乘即得到干涉条纹图,干涉图各像元仍用复数表示, 复数的模表示强度,幅角表示干涉相位,如下式所示,只是[ , ) 之间的主值,需要做解
缠处理恢复真实相位;干涉图的质量可用相干系数衡量
E[u1
u
* 2
]
[0,1]
E[ u1 2 ]E[ u2 2 ]
2.2 影像配准及重采样
高精度的配准(优于 0.1 像元)通常采用从粗配到精配的逐级配准策略,首先是基于 轨道信息结合成像几何关系进行粗配准,配准精度为几个像元,然后在从影像上对应于主 影像上一个像元的区域内开窗逐一搜索与该像元相关系数最大的即为在从影像上的对应像 元,达到像元级的配准,之后将主从影像进行过采样重复上述配准即可达到亚像元级的配 准,最后将上述得到的配准关系对像元位置进行多项式拟合,利用拟合所得多项式将从影 像重采样到主影像空间即完成配准过程。
合成孔径雷达干涉相位图包含了 2 次成像时雷达天线到目标的传播路径长度差异信 息,传播路径的长度一般受到卫星测量位置、测量时间以及大气状况等改变的影响。因为 雷达两次成像期间,目标点发生了形变,再考虑进外界环境的变化,干涉图中的相位就会 包含有多个相位贡献。
图 2 差分干涉测量几何示意图
图 2 给出了差分干涉测量几何示意图,其中雷达视向与雷达轨道方向正交。在重复轨
2.7 相位解缠
原始干涉相位只是位于[ , ) 之间的主值,存在整周模糊问题,为了恢复真实的相位 值需要在此基础上加上 2 的整数倍,此过程称为相位解缠,原始观测相位与真实相位之 间存在如下关系
w W mod ,2
在理想情况下解缠过程可通过简单的积分运算实现,而由于噪声的存在、去相关现象 加之复杂地形导致的成像阴影与迭掩等的存在,使得相位解缠过程变得异常复杂;二维相 位解缠要兼顾两个方面:一致性和精确性。一致性是指解缠后任意两点之间的相位差与积 分路径无关,精确性是指解缠后的相位能真实的恢复绝对相位;目前常用的解缠算法可分 为两类:基于路径积分的解缠算法和基于最小二乘的相位解缠算法;另外相干图可以作为 解缠处理的引导,对相干性较低的区域进行掩模、避开大量残差点对整体解缠的精度会有 所提高。
2.8 形变结果转换与地理编码
将差分干涉结果利用公式 def
-
4
r 转成形变量,此时还是雷达坐标系系,还需要
进行地理编码。地理编码是 InSAR 处理流程的最后一步,是将前期处理得到的雷达坐标系
下的结果转化为地理坐标系的过程。进行地理编码主要出于以下目的:纠正由地形起伏造
成的 SAR 影像几何变形、与已有地理坐标系下的其他资料进行比较和融合。通常采用距
2
R 2 a r g {U 2 }
(1-5)
上式中右边第一项为雷达到地面目标点的斜距所产生的相位,第二项为地物本身后向 散射特性所产生的相位,它是一个随机变量。系数“2”表示收发双程,如果针对的是单天 线接收模式,则不需要乘 2;λ表示雷达波长;arg{U1} 和 arg{U2}为不同散射特性形成的 随机相位。如果在雷达两次观测时间内地物的散射特性没有发生变化,即不存在时间失相 关,则两次回波信号的散射相位相等。这时两回波信号的相位之差(干涉相位)可表示如 下:
目前,InSAR 地表形变监测技术方法有:常规差分干涉测量(D-InSAR)技术、时序 分析(PS-InSAR/SBAS-InSAR)技术方法等。
2 D-InSAR 沉降监测处理过程
目前,利用 D-InSAR 方法进行地面沉降监测,其数据处理技术发展较为成熟,其所 需的数据量较少(至少两景),要得到地表形变相位,需要去除椭球参考面、地形、噪声 等相位。根据地形相位的去除方法不同又可分为二轨法、三轨法、四轨法。二轨法是利用 已知的 DEM 来消除地形相位,从而获得地表形变相位,首先根据雷达成像参数及几何关 系把外部 DEM 模拟转换到 SAR 影像坐标系,将干涉处理得到的相位减去模拟的相位,这 样就得到去除地形相位后的形变相位,二轨法是目前 D-InSAR 常用处理方法。
合成孔径雷达干涉测量(InSAR)是利用对同一地区观测的两幅 SAR 复影像数据进行 相干处理,通过相位信息获取地表高程信息及形变信息的技术。根据成像时间分类, InSAR 可以分为单次轨道和重复轨道两种模式。单次轨道干涉是指在同一机载或星载平台 上装载两幅天线,其中一幅天线发射信号,两幅天线都接受地面回波信号,并利用获取的 数据进行干涉处理。重复轨道干涉是指同一传感器或相似传感器按照平行轨道两次对地成 像,分别发、收信号,利用得到的数据进行干涉处理。目前,常说的 InSAR 地表形变监测 通常为星载 SAR 重复轨道模式。