第二章 刚体运动学与动力学(下)
《刚体动力学 》课件
牛顿第二定律
物体的加速度与作用在物 体上的力成正比,与物体 的质量成反比。
牛顿第三定律
对于任何两个相互作用的 物体,作用力和反作用力 总是大小相等,方向相反 ,作用在同一条直线上。
刚体的平动
刚体的平动是指刚体在空间中 的位置随时间的变化而变化, 而刚体的形状和大小保持不变
的运动。
刚体的平动具有三个自由度 ,即三个方向的平动。
05
刚体的动力学方程
刚体的动力学方程
牛顿第二定律
刚体的加速度与作用力成正比,与刚体质量 成反比。
刚体的转动定律
刚体的角加速度与作用力矩成正比,与刚体 对转动轴的转动惯量成反比。
刚体的动量方程
刚体的动量变化率等于作用力对时间的积分 。
刚体的自由度与约束
自由度
描述刚体运动的独立变量,如平动自由度和转动 自由度。
约束
限制刚体运动的条件,如固定约束、滑动约束等 。
约束方程
描述刚体运动受约束的数学表达式。
刚体的动力学方程的求解方法
解析法
通过代数运算求解动力学方程,适用于简单问 题。
数值法
通过迭代逼近求解动力学方程,适用于复杂问 题。
近似法
通过近似模型求解动力学方程,适用于实际问题。
06
刚体动力学中的问题与实例 分析
人工智能和机器学习的发展将为刚体 动力学的研究提供新的思路和方法, 有助于解决复杂动力学问题。
感谢您的观看
THANKS
船舶工程
在船舶工程中,刚体动力学 用于研究船舶的航行稳定性 、推进效率以及船舶结构的 安全性等。
兵器科学与技术
在兵器科学与技术领域,刚 体动力学用于研究弹药的发 射动力学、火炮的射击精度 和稳定性等。
刚体的运动学与动力学问题练习

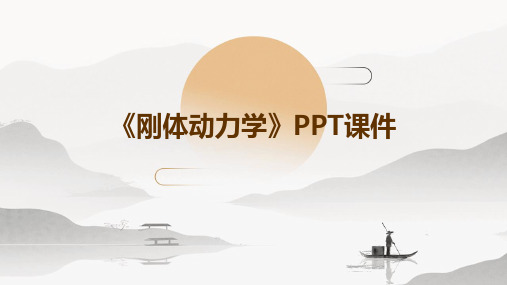
刚体的运动学与动力学问题练习刚体的运动学与动力学问题练习1.如图14—14所示,一个圆盘半径为R ,各处厚度一样,在每个象限里,各处的密度也是均匀的,但不同象限里的密度则不同,它们的密度之比为1ρ:2ρ:3ρ:4ρ=1:2:3:4,求这圆盘的质心位置.2.如图14—15所示,质量为m 的均匀圆柱体,截面半径为R ,长为2R .试求圆柱体绕通过质心及两底面边缘的转轴(如图中的1Z 、2Z )的转动惯量J .3.如图14—16所示,匀质立方体的边长为a ,质量为m .试求该立方体绕对角线轴PQ 的转动惯量J .4.椭圆细环的半长轴为A ,半短轴为B ,质量为m (未必匀质),已知该环绕长轴的转动惯量为A J ,试求该环绕短轴的转动惯量B J .5.如图14—17所示矩形均匀薄片ABCD 绕固定轴AB 摆动,AB 轴与竖直方向成30α=°角,薄片宽度AD d =,试求薄片做微小振动时的周期.6.一个均匀的薄方板,质量为M ,边长为a ,固定它的一个角点,使板竖直悬挂,板在自身的重力作用下,在所在的竖直平面内摆动.在穿过板的固定点的对角线上的什么位置(除去转动轴处),贴上一个质量为m 的质点,板的运动不会发生变化?已知对穿过板中心而垂直于板的轴,方板的转动惯量为216J Ma =. 7.如图14—18所示,两根等质量的细杆BC 及AC ,在C 点用铰链连接,质量不计,放在光滑水平面上,设两杆由图示位置无初速地开始运动,求铰链C 着地时的速度.8.如图14—19所示,圆柱体A 的质量为m ,在其中部绕以细绳,绳的一端B 固定不动,圆柱体初速为零地下落,当其轴心降低h 时,求圆柱体轴心的速度及绳上的张力.图14-14图14-15 图14-16 图14-17图14-18图14-199.如图14—20所示,实心圆柱体从高度为h 的斜坡上从静止纯滚动地到达水平地面上,继续纯滚动,与光滑竖直墙做完全弹性碰撞后返回,经足够长的水平距离后重新做纯滚动,并纯滚动地爬上斜坡,设地面与圆柱体之间的摩擦系数为μ,试求圆柱体爬坡所能达到的高度'h .10.在一个固定的、竖直的螺杆上的一个螺帽,螺距为s ,螺帽的转动惯量为J ,质量为m .假定螺帽与螺杆间的摩擦系数为零,螺帽以初速度0v 向下移动,螺帽竖直移动的速度与时间有什么关系?这是什么样的运动?重力加速度为g .11.在水平地面上有两个完全相同的均匀实心球,其一做纯滚动,质心速度v ,另一静止不动,两球做完全弹性碰撞,因碰撞时间很短,碰撞过程中摩擦力的影响可以不计.试求:(1)碰后两球达到纯滚动时的质心速度; (2)全部过程中损失的机械髓的百分数. 12.如图14—21所示,光滑水平地面上静止地放着质量为M 、长为l 的均匀细杆.质量为m 的质点以垂直于杆的水平初速度0v 与杆一端做完全非弹性碰撞.求(1)碰后系统的速度及绕质心的角速度,(2)实际的转轴(即静止点)位于何处?13.如图14—22所示,实心匀质小球静止在圆柱面顶点,受到微扰而自由滚下,为了令小球在θ≤45°范围内做纯滚动,求柱面与球间摩擦因数μ至少多大?14.如图14—23所示,半径为R 的乒乓球,绕质心轴的转动惯量223J mR =,m 为乒乓球的质量,以一定的初始条件在粗糙的水平面上运动,开始时球的质心速度为0C v ,初角速度为0?,两者的方向如图.已知乒乓球与地面间的摩擦因数为μ.试求乒乓球开始做纯滚动所需的时间及纯滚动时的质心速度.15.如图14—24所示,一个刚性的固体正六角棱柱,形状就像通常的铅笔,棱柱的质量为M ,密度均匀.横截面六边形的边长为a .六角棱柱相对于它的中心轴的转动惯量2512J Ma =.相对于棱边的转动惯量是'2512J Ma =.现令棱柱开始不均匀地滚下斜面.假设摩擦力足以阻止任何滑动,并且一直接触斜面.某一棱刚碰上斜面之前的角速度为i ?,碰后瞬间角速度为f ?,在碰撞前后瞬间的动能记为ki E 和kf E .试证明f i s ??=,kf ki E rE =,并求出系数s 和r 的值.图14-20图14-21图14-23 图14-22 图14-24参考答案1.先确定一半径为R 的1/4圆的匀质薄板的质心,如图答14—1所示,在xOy 坐标中,若质心坐标为(x c ,y c ),由对称性知x c =yc ,则根据质心的等效意义,有231lim cos()cos()sin()lim[sin 3()sin()]42222822nc x x i R x RiR iR iR iinnnnnnnππππππππ→∞→∞===+∑,于是有313sin()sin ()1432222lim [sin 3()sin()]lim[3222234sin() 4c x x n n R R n n x i i n n n nnπππππππ→∞→∞+=+=??1sin ()sin ()442222]43sin()4n n R n n nnππππππ++=.针对本题中圆盘各象限密度不同有下列方程22123412344()()443c R R R x ππρρρρρρρρπ+++=--+, 22123412344()()443c R R R y ππρρρρρρρρπ+++=--+,解以上方程得0c x =,815c y R π=-.故质心坐标为(0,815R π-).2.如图答14—2所示,对图中所示的1Z 、2Z 、Z 坐标系与3Z 、4Z 、Z 坐标系运用正交轴定理,有1234J J J J J J ++=++,其中2312JmR =,24712J mR =,由对称等效可知 2121324J J mR ==. 3.如图答14—3所示,将立方体等分为边长为2a的八个小立方体,每个小立方体体对角线到大立方体体对角线距离d ==,依照本专题例3用量纲分析法求解有22222()()6()()(82828m a m a m kma k k ??=++,所以有 16k =,21 6J ma =.图答14-11Z R2ZZ4Z3Z图答14-2图答14-34.由正交轴定理22()A B i iiJ J m x y +=+∑及椭圆方程22221y x A B+=,得22222222()(1)A B i i i A A A J J m A y y mA J B B +=-+=+-∑,所以222B A A J mA J B=-.5.如图答14—4所示,设板质量为M ,则对AB 轴的转动惯量2211lim ()3nn i M d J i Md n n →∞===∑,对应于与竖直成α角的转轴,等效的重力是与轴垂直的分量sin Mg α,则24T =. 6.薄板上未贴m 时对悬点的转动惯量22023J J Md Ma =+=, 贴m后22123J Ma mx =+.振动周期相同,应有01'()J J Mgl M m gl =+,贴上m 后,质心相对悬点'mx Mll M m+=+,l =,解得x =.7.初始时,系统具有的重力势能P E mgh =,m 为一根杆的质量,铰链C 刚着地时,速度C v 竖直向下,各杆的瞬时转轴为()A B ,转动惯量2/3J ml =,l 表示每段杆长:由于铰链C 质量不计,则系统总动能22221112()233C k Cv E J ml mv l ?===,下落中机械能守恒,有 213Cmgh mv =,mgh:得C v =. 8.如图答14—5所示,圆柱体关于几何轴的转动惯量212J mR =,对过与绳相切点P 的平行轴的转动惯量232P J m R =;设轴心降低h 时速度为v ,由机械能守恒定律 2213()24v mgh J mv R ==,所以v 又由质心运动定律mg T m R β-=,由转动定律2mgR mR β=.则13T mg =.9.纯滚动时,无机械能损失,于是满足方程2222113()2224mR v mgh mv mv R =+?=,圆柱体与光滑墙碰撞,开始做非纯滚动,经时间t 达到纯滚动,质心速度由'C C v v →,角速度从'C C v v R R →,运用动量定理及动量矩定理'()C C ft m v v =-,'2()2C C v v mR fRt R R =-,解得'3C C v v =,此后机械能守恒,联系第一式可得''234mgh mv =,得'9h h =10.由机械能守恒定律,得22220011()()22t t mgs J m v v ??=-+-,又因2v sπ=,可得图答14-4图答14-522'022224t m v v gs g s J m s π-==+,即螺帽匀加速直线下降'0t v v g t =+,'224m g g Jm sπ=+. 11.(1)如图答14—6所示,两球225mv J =,刚完成弹性碰撞时,两球交换质心速度,角速度未变;设两球各经1t 、2t 达到纯滚动状态,质心速度为1v 、2v ,对球1有11ft mv =,2112()5v mR v fRt R R =-,所以127v v =;对球2有22()ft m v v =-,22225v mR fRt R =,257v v =.(2)系统原机械能222211127()22510k mR v E mv mv R =+?=;达到纯滚动后2222221125122529()()()()277257770k v v mR v v E m mv =++?+=,则2041%49η=≈. 12.(1)碰后系统质心位置从杆中点右移为2m lx m M ?=+.由质心的动量守恒0()C mv M m v =+,求得质心速度0C mv v M m=+. (2)由角动量守恒202122l Ml lmv m x ??=+,x 为瞬时轴距杆右端的距离,考虑质心速度与角速度关系022()2()C v mv Ml m M x Ml x M m ?==+--+,在23x l =处,有06(4)mv M m l ?=+. 13.圆柱半径与小球半径分别以R 、r 表示,小球滚到如图14—7位置时,质心速度设为C v ,角加速度β,转动惯量225J mr =,受到重力mg 、圆柱面支持力N 、静摩擦力f ,由质心运动定律,有 2cos Cmv mg N R rθ-=+,①sin mg f m r θβ-=,②自转动定律有 225fr mr β=,③ 又因小球做纯滚动,摩擦力为静摩擦力不做功,球的机械能守恒 22221127()(1cos )()22510C C Cv mr mg R r mv mv r θ+-=+?=,④ 将③式代入②式得5sin 2f mg f mr mr θ-=,于是2sin 7f mg θ=;将④式代人①式得10()(1cos )cos 7()mg R r mg N R r θθ+--=+,所以1710(cos )77N mg θ=-.图答14-6图答14-7C因做滚动,必定f ≤N μ,即μ≥2sin 17cos 10θθ-,在θ≤45°范围内μ≈0.7.14.乒乓球与地接触点O 既滚又滑且达到纯滚时,由角动量守恒,得 00C C mRv J mRv J ??-=+,即002()3C C v v R ??-=+.达到纯滚动时C v R ?=,由此可得纯滚动质心的速度002233C C v v R ?=-;其中,002233C v R ?>,纯滚后球向右顺时针纯滚,若002233C v R ?<,则纯滚后球向左逆时针纯滚.质心匀加速滚动,达到纯滚时间设为t ,由0C C v v gt μ=-,可得002()5C v R t gμ+=. 15.设以某棱为轴转动历时t ?,角速度i f ??→,时间短,忽略重力冲量及冲量矩,矢量关系如图答14—8所示,对质心由动量定理 ()sin 6i f N t Ma π=+,()cos6f i f t Ma π-?=-.对刚体动量矩定理25cossin()6612f i f ta N ta Ma ππ-?=-.解得1117f i ??=,1117s =,2121 289r s ==.图答14-8。
第4章刚体的运动学和动力学

P
II
M
d d 2 2 f " (t ) ቤተ መጻሕፍቲ ባይዱt dt
当 β c
0 t 1 2 ( ) t t 0 2 2 2 0 2 ( 0 )
z ω,
与质点的匀加速直线运动公式相象
二. 定轴转动刚体上各点的速度和加速度
端,试计算飞轮的角加速 解 (1) Fr J
(2) mg T ma
rO
T
Fr 98 0.2 39.2 rad/s 2 J 0.5
mgr J mr 2
两者区别
F
mg
Tr J a r
98 0.2 2 21 . 8 rad/s 0.5 10 0.22
例如 T' T
x dx
x
• 在定轴转动中,力矩可用代数值进行计算
T' T
M i TR T' R
M i TR T' r
二. 刚体对定轴的转动定律
实验证明 当 M 为零时,则刚体保持静止或匀速转动 当存在 M 时, 与 M 成正比,而与J 成反比
M J
刚体的转动定律
M kJ
例 一根长为 l ,质量为 m 的均匀细直棒,可绕轴 O 在竖直平 面内转动,初始时它在水平位置 m l x O 求 它由此下摆 角时的 解 取一质元
M xdm g g xdm
C
mg
dm
M mgxC
1 M mgl cos 2
xdm mxC
重力对整个棒的合力矩等于重力全部 集中于质心所产生的力矩
L x
J
1 x dx ML2 3
刚体的一般运动的运动学和与动力学动力学

加速度
刚体在一段时间内速度的 变化率,表示刚体速度变 化的快慢。
刚体的平动
平动
刚体在运动过程中,其上任意两 点都沿着同一直线作等距离的移 动。
平动特点
刚体上各点的速度和加速度都相 等,与参考系的选择无关。
刚体的转动
转动
刚体绕某一定点做圆周运动。
转动特点
刚体上各点的速度和加速度大小相等,方向不同。
阻尼振动
阻尼振动是指由于阻力作用而使振动系统受到损 耗的振动。
受迫振动
受迫振动是指在外力作用下产生的振动。
刚体的稳定性和平衡性
静态平衡
刚体在静止状态下,如果受到微小扰 动后能恢复到原来的平衡位置,则称 该平衡为静态平衡。
动态平衡
刚体在运动状态下,如果受到微小扰 动后能保持原来的运动状态不变,则 称该平衡为动态平衡。
感谢观看
THANKS
刚体的平衡
总结词
刚体的平衡是指刚体在运动或静止时,其上各点的加速度均为零的状态。
详细描述
刚体的平衡可以通过力的合成和分解来分析。当刚体处于平衡状态时,其上各点的加速度均为零,即合外力为零。 根据力的平移定理,可以将力的作用点平移至刚体的质心,从而将刚体平衡问题转化为质点平衡问题。同时,根 据力矩平衡条件,可以得出刚体平衡的条件为合外力矩为零。
力矩和角速度
总结词
力矩是力和力臂的乘积,它描述了力对刚体转动的效应;角速度是描述刚体转动快慢的 物理量。
详细描述
力矩是力和力臂的乘积,其方向垂直于力和力臂所在的平面。力矩可以改变刚体的转动 状态,包括转动方向和角速度大小。角速度是描述刚体绕固定点转动的快慢的物理量, 其方向与转动方向相同。公式表示为M=FL,其中M表示力矩,F表示力,L表示力臂。
刚体动力学2
J = ∑ mi ri 2
转动惯量
转动定律
M = Jβ
刚体是特殊质点系,转动定律和质心运 动定律非常相似:
G G M = Jβ
G G F = mac
4
§3.3 转动惯量
一、转动惯量的物理意义 转动惯量特点
J = ∑ mi ri = ∑ J i
2
第 第三 三章 章
转动惯量是转 动惯性的量度
质量是平动 惯性的量度
桌面支持力对轴不产生力矩,摩 擦力矩使圆盘转动停止。 设转动方向为正,转动定律
o
ω0
R
dω −M f = J β = J dt
14
第三 三章 章 设圆盘的体密度 ρ ,厚度 l,在圆盘上 第 半径r处,取宽为dr的细圆环为质元。 质量dm=ρdV=2πrlρdr ,摩擦力df=μN=μgdm G G G 2 d M = 2 πμρ glr dr 力矩 dM f = r × df 大小 f
转 动 定 律
第 第三 三章 章
o x 1 2 M = Fy = J β = ml β 3 y F = F = ma x方向上的质心运动定理 ∑ x cx c
【解】只有F的力矩引起转动,转动定律
线量和角量关系,细杆的质心在l/2处
F y
l acx = ac = β 2
解得
2 y= l 3
17
【例】 如图所示,两物体的质量
J = ∑ mi ri
2
2
J = ∫r dm
质量体分布 dm ρ= dV J = ∫V r 2 ρ d V
6
一些常见刚体的转动惯量 一些常见刚体的转动惯量
第 第三 三章 章
细杆
1 2 J = ml 12
刚体运动学解析
将矢量OA和OB按平行四边形法则合成矢量OC
• 两个转动在C点产生速度的大小分别为:
v1 r11 v1 2SOCA
v2 r22
v2 2SOCB
r2 r1
v1 v2 S□OBCA
• 两个转动在C点产生速度的方向分别为: ω1 v1 垂直平面向外 ω2 v2 垂直平面向里
v1 和 v2 抵消 C 点不动
OC 即,OC轴长等于ω大小
两步证明 角速度的合成服从平行四边形法则
§3
刚体定轴转动
定轴转动的动力学 与质点动力学相对应
角动量和角速度的关系
v ωr
把刚体看成质点组
J mi ri vi mi ri ω ri
i
i
A B C A C B A BC
mi ri ri ω ri ωri
i
i
令 miri2 I 叫做刚体绕定轴的转动惯量
i
• I 反映刚体质量相对于转轴的分布情况 • 同样质量的刚体,由于形状不同,其转动惯量因而不同
J// = Iω
p = mv
I 对应于m,二者都是惯性大小的量度
如何计算转动惯量?
对于质量连续分布的物体
m d m
若密度为ρ
I r2 d m r2 dV
v1 =ω1×(P到OA的垂直距离) = 2SΔPOA v2 =ω2×(P到OB的垂直距离) = 2SΔPOB
方向:v1 与 v2 反向
v v1 v2 2SPOA 2SPOB 2SPOC
= OC×(P到OC的垂直距离)
比较 v=ω×(P到OC的垂直距离)
v =OC×(P到OC的垂直距离)
矢量不仅有大小和方 向,还需服从平行四 边形合成法则
刚体动力学运动学问题专题讲解
Ml s lS mM
lS
ml S mM
例2质心运动定律来讨论以下问题
一长为l、密度均匀的柔软链条,其单位长度 的质量为λ.将其卷成一堆放在地面.若手提 链条的一端,以匀速v 将其上提.当一端被提 离地面高度为 y 时,求手的提力.
y y yC o
F
c
解:建立图示坐标系
i 竖直方向作用于链条的合外力为
例3
设有一质量为2m的弹丸,从地面斜抛出去,它飞行在
最高点处爆炸成质量相等的两个碎片,其中一个竖直自由下落,另 一个水平抛出,它们同时落地.问第二个碎片落地点在何处?
解:选弹丸为一系统,爆炸前、 后质心运动轨迹不变.建立 图示坐标系.
2m O
m
m1 m2 m x1 0
xC为弹丸碎片落地时质心 离原点的距离. xC
xC
C
xC
m x
x2
m1 x1 m2 x2 m1 m2
x2 2 xC
7
/12
2. 质心运动定理 dri mi miv i drc d t • 质心的速度 vc dt m m
P mvc —— 质点系的总动量
Pi m
•
质心的加速度和动力学规律
v R
4m gh 2m M R
例题3 一质量为m、半径为R的均质圆柱,在水 平外力作用下,在粗糙的水平面上作纯滚动,力 的作用线与圆柱中心轴线的垂直距离为l,如图所 示。求质心的加速度和圆柱所受的静摩擦力。 解:设静摩擦力 f 的方向如 图所示,则由质心运动方程
l ac
F
圆柱对质心的转动定律:
二、质心
1. 质心
质心运动定理
刚体力学概要
0 , 0 2
〔5〕一般运动
刚体运动时不受任何约束,可以在空间任意运动,可分解为质心的平 动与绕通过质心的某直线的定点转动。其自由度为6.
平动可用C点的坐标 x0, y0, z0
描述,定点转动用欧拉角 ,, 描述。
4.1.2 刚体的角速度
刚体转动特性可用角位移和角速度来描述。
〔1〕角位移
设刚体在 t 时间内绕某轴线转过角度
刚体的运动有以下几种形式
〔1〕平动 刚体运动中刚体上任意始终线始终彼此平行时称为平动,刚体平动
时刚体上全部点的速度、加速度一样,刚体上任意一点的运动都可以代 表整个刚体的运动,其自由度为3,如图4.1所示。
(2)定轴转动
刚体运动时,其中有两个点始终不动,则刚体绕这两点决定的直线 转动,称为定轴转动(自由度多少?)
这时〔3〕和〔4〕式变为
cg t(03 2R0)
(7)
3 gt
(8)
2R
即cω从0R逐时渐,增乒大乓,球c 作从纯(滚动0 ,所32经R历的0时)逐间渐t由减(小7。)当与(c 减8)小式至联立
确定:
2 3g tg t(03 2R 0)
t 52g(03 2R0)
0mcgo sF N
IcRF
xc R
由以上四式,可得法向约束反力 F N 和切向约束反力 F :
FNmcgos
F
1m gsin
3
因切向约束反力为静摩擦力:F FN
1msgi nmcgos
3
1 tg
3
争论:
① 若保持斜面倾角α不变,则斜面的粗糙程度达到 1 tg
时,圆柱体在斜面上只滚不滑;
第4章 刚体力学
内容: ·刚体运动学
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(e) 外力的主矩为M O 。动量矩定理:
dLO (e) MO dt (e) 与定轴转动不同, LO,M O 与自转轴Oz 不重合。
通常陀螺的进动角速度 ωe 较小, ωe,可以认为 ωa ω 且ωa 沿自转轴Oz , 于是有: LO J zω 上述简化,可得出陀螺 的近似与J pp的平方根成反比 R k J pp k为任意选定的常数
点P的坐标( x, y, z )为 x Rl,y Rm,z Rn 改变p轴的方位,J pp 及R随之改变,点 P在空间中的轨迹形成一 封闭曲面。该曲面方程 为: J xx x 2 J yy y 2 J zz z 2 2 J xy xy 2 J xz xz 2 J yz yz k 2 显然,是一以 O为中心的椭球面方程。 称为惯量椭球 。
(3)球对称刚体过球心的任意轴均为惯量主轴。 (4)刚体上中心惯量主轴上各点的惯量主轴必与中心惯量 主轴平行。
4. 惯量椭球
固连坐标系Oxyz 惯量张量J的矩阵为: J xx J J xy J xz J xx (l , m, n) J xy J xz J xy J yy J yz J xy J yy J yz J xz J yz J zz
4. 刚体的动能
T
1 2 1 v d m ( ω r ) ( ω r ) dm 2 2 1 [(z y y z )i ( x z z x ) j ( y x x y )k ]2 dm 2 1 [(z y y z ) 2 ( x z z x ) 2 ( y x x y ) 2 ]dm 2 1 2 2 2 [ J xx x J J y y y z z z 2 yz z y 2 J xz z x 2 J y x x y ] 2 J xx 1 ( x , y , z ) J xy 2 J xz 1 T 1 ω Jω ω L 2 2 J xy J yy J yz J xz x J yz y J zz z
M
J yy ( x2 z 2 )dm ,
M
J zz ( y2 x2 )dm
M
惯性积: J xy xydm ,
M
J xz xz dm ,
M M
J zy z ydm LO ( J xx x J xy y J xz z )i ( J yy y J yz z J yx x ) j ( J zz z J zy y J xz x )k
dLO u dt 如图,u可以理解为LO矢端的“速度”。 根据动量矩定理:
(e) u MO
(5 17)
(e) u MO
(5 17)
上式称为赖柴定理:质 点系对定点的 动量矩矢端的速度,等 于外力对同一 点的主矩。
按陀螺近似理论,其动量矩矢与 对称轴重合,因此,外力矩也决定 了对称轴的运动。 1. 自由陀螺保持对称轴在惯性参考系中的方位不变 自由陀螺:外力主矩为零的陀螺。 此时 u=0, LO=恒量,即A不动,因此对称轴方位不变。
2. 定点运动刚体的欧拉动力学方程
dLO 动量矩定理: M O,选择主惯性轴, dt d y d x d z A i B j C k dt dt dt di dj dk A x B y C z MO dt dt dt di ω i y k z j dt dj ω j z i x k dt dk ω k x j y i dt
图示陀螺仪的例子,陀螺由固定 圆环中的两个可动圆环支持,以保 持其质心O不动。不计摩擦,外力对 其质心O的力矩为零。自由陀螺。 由于其自转轴方向不变,因此可 以用来导航。陀螺仪广泛应用于飞 机,火箭,导弹,鱼雷,坦克,照 相机等领域。
2. 陀螺受力矩作用,当力矩矢量与对称轴不重合时
M O ( P ) rC P,方向在水平面内 u M O ( P ),不改变章动角 , 对称轴Oz 绕固定轴Oz转动, 称为进动,形成一个圆 锥面。 重力不会使高速自转的 陀螺 倒下,而是沿圆锥面进 动。 设进动角速度ωe,
M M
[(x2 y2 z 2 )( x i y j z k ) ( x x y y z z )(xi yj z k )]dm dm}i { x [( y2 z 2 )]dm- y xydm- z xz
高等动力学
中国矿业大学力建学院力学系 李毅
2-1
目 录
第二章 刚体运动学与动力学(下)
§2-4 §2-5 §2-6 §2-7 陀螺仪近似理论 刚体定点运动的动力学 无力矩刚体的定点转动 刚体自由运动的动力学
2-2
§2-4 陀螺仪近似理论
当陀螺绕自身对称轴高速旋转时, 即使对称轴偏离了铅垂线,陀螺将绕 铅垂线晃动而不倒下。
称为转动惯量矩阵 , 对称矩阵,可以证明 J是张量。
3. 惯量主轴
J xx J J xy J xz
J xy J yy J yz
J xz J yz J zz
由线性代数可知,适当 选择固连坐标系 Oxyz ,可以使转动 惯量矩阵为对角型,此 时称三个坐标轴为 惯性主轴。这时 A 0 0 x A i B j C k LO Jω 0 B 0 x y z y 0 0 C z 一般三个主转动惯量不 相等,因此,动量矩与 角速度不 在一个方向,即 LO与ω一般不共线。但当 ω沿任何一个惯性 主轴时,LO与ω共线
M M M
dm- z xydm} j { y [(x2 z 2 )]dm- x yz
M M M
dm- y xz dm}i { z [(x2 y2 )]dm- x yz
M M M
转动惯量(又称惯量矩): J xx ( y2 z 2 )dm ,
椭球的3个主轴对应于刚体的 3个惯量主轴。刚体相对 质心 的惯量椭球称为中心惯 量椭球。刚体质量轴对 称分布时,其惯 量椭球为旋转椭球。极 轴与赤道面内的任意轴 都是惯量主轴。 刚体质量球对称分布时 ,其惯量椭球为圆球, 所有过O的轴都是 惯量主轴。 惯量椭球与物体形状具 有某种相似性,如细长 的物体,其 惯量椭球也细长,球形 物体,其惯量椭球也像 球形。
当陀螺静立在地面上时,稍微有 点扰动,陀螺就会由于重力而倒下。
工程上把有一个固定点,并绕自 身对称轴高速旋转的刚体称为陀螺。 人们可以利用陀螺现象导航,定 向,稳定船舶。陀螺现象有时会是有 害的。船舶上的高速转轴,在船舶晃 动或转弯时会产生附加动压力,可能 造成破坏。
设陀螺以角速度 ω绕自身对称轴Oz 转动(自转),同时 Oz 以角速度 ωe 绕定轴Oz转动(进动)。 刚体则以绝对角速度 ωa 绕定点O运动。 ωa ωe ω
当固连坐标系取惯性主 轴时 A 0 0 x 1 T ( x , y , z ) 0 B 0 y 2 0 0 C z 1 2 2 2 T ( A x B C y z ) 2 当T为常数时,上式表明在 动能守恒条件下瞬时角 速度ω矢量的 端点轨迹为椭球,称为 动能椭球。
§2-5 刚体定点运动的动力学
1. 定点运动刚体的动量矩
LO r (dmv ) r (ω r )dm [(r r )ω (ω r )r ]dm
M M M
[(x2 y2 z 2 )ω ( x x y y z z )r ]dm
陀螺效应可能使机器轴承负荷增大而损坏。另一方面陀螺效 应也可被加以利用。航海陀螺稳定器就是利用陀螺效应的例子。
如图,转子绕AA轴以 ω高速转动。当海轮受风 浪干扰力矩M作用而绕船 的纵轴晃动时,自动调 节 系统令环座以角速度 ωe 绕 DD轴转动,以迫使自转 轴进动。由此产生陀螺 力 矩与风浪干扰力矩相反 , 使船体维持平衡。
2. 惯量矩阵与惯量张量
写成矩阵形式: J xx LO J xy J xz J xx J J xy J xz J xy J yy J yz J xy J yy J yz J xz x J yz y J zz z J xz J yz J zz LO Jω
三个惯性主轴构成的固连坐标系称为刚体的主轴坐标 系。当主轴坐标系的原点在质心时,称为中心主轴坐标系, 相应的主转动惯量称为中心主惯量。 刚体的惯量主轴有以下规律:
(1)若刚体有对称轴,则必为惯量主轴,称为极轴。过极 轴上任意点且与极轴垂直的任意轴也是惯量主轴,称为赤 道轴。 (2)若刚体有对称平面,则该平面的法线必为惯量主轴。
例5 海轮上的汽轮机转子 轴沿船的纵轴 x,转子转动惯量 为J x,转子角速度为 ,如图所示。如海轮绕 横轴y简谐摆动, 摆幅为 0,周期为T,已知两轴承间距为 l,求转子的陀螺力 矩和对轴承的压力。
例6 碾子A在水平面上作纯滚动。 杆OA以角速度e 绕铅 直轴转动。设碾子质量 为m,半径为R,OA长为l。求碾子滚 动时对水平面的附加压 力。
u ωe LO ωe J zω
(e) MO ωe J zω sin
(e) ωe J zω M O
ωe与ω成反比,当陀螺因摩擦 自转减慢时,进动会逐 渐增大。
3. 陀螺效应和陀螺力矩 陀螺效应是高速转动的机械,当转轴方位发生改变 时,产生附加力矩(陀螺力矩)的现象。
如图,陀螺绕z轴以ω高速转动, 当z轴被迫改变方向时,设 z轴 被迫绕y轴转动,角速度为 ωe, 此时: