高斯-牛顿法
梯度下降 高斯牛顿
梯度下降和高斯牛顿是机器学习和优化领域常用的两种优化方法。
梯度下降是一种常用的一阶优化算法,可以用于求解目标函数的最小值。
它通过计算目标函数在当前参数下的梯度(即指向最大增长方向的向量)并沿着梯度的反方向迭代更新参数,直到收敛达到最小值。
高斯牛顿法是一种基于牛顿法的优化算法,利用目标函数的一阶和二阶导数信息来更快地寻找最小值。
它通过计算目标函数在当前参数下的梯度和海森矩阵(即二阶导数)来更新参数,直到收敛达到最小值。
相比于梯度下降,高斯牛顿法通常更快地收敛,但要求目标函数的二阶导数可计算和海森矩阵可逆。
在实际应用中,梯度下降通常适用于目标函数的梯度容易计算的场合,而高斯牛顿法则适用于目标函数参数较少、目标函数相对平滑、并且具有较快的收敛速度的场合。
高斯牛顿法

高斯牛顿法编程及实践报告班级:地物11101成员:王云鹤吴迪杨寒张林涛一.小组简介本组成员:王云鹤,吴迪,杨寒,张林涛杨寒,张林涛负责讨论方法原理及编程思路王云鹤负责编程吴迪负责整理并编写报告二.方法原理曲线拟合的目标函数自动反演的主要方法是曲线拟合,即寻找一个模型的理论曲线,使其与实测曲线现在均方差极小意义下重合得最好。
在大地电磁测深资料一维解释中,研究的对象时水平层状地电模型。
设有k 层,就有n=2k-1个参数,即各层的电阻率和厚度,记为列向量形式: λ⃑ =[λ1,λ2,…λn ]T 实际观测数为m 个,是对应不同周期的视电阻率值,也记为列向量形式:ρa ⃑⃑⃑⃑ =[ρa1,ρa2,…ρam ]T一般情况下m>n 。
各周期的理论视电阻率值是模型参数的 λ⃑ 函数,记为:ρc ⃑⃑⃑ =[ρc1(λ⃑ ),ρc2(λ⃑ ),…ρcm (λ⃑ )]T 层状模型理论值与观测值之间拟合的判断依据一般是取目标函数:F( λ⃑ )= ∑(ρai −ρci )2m i=1=∑f i z ( λ⃑ )=‖ f ( λ⃑ )‖2=极小m i=1 (3-1)设 λ0⃑⃑⃑ 为初始参数列向量,f i ( λ⃑ )= f i (λ0⃑⃑⃑ )+[∇f i (λ0⃑⃑⃑ )]ς·Δλ⃑⃑⃑⃑ ,其中:Δλ⃑⃑⃑⃑ = λ⃑ −λ0⃑⃑⃑ ; ∇f i (λ0⃑⃑⃑ )=[∂f 1( λ⃑ )∂λ1,…,∂f i ( λ⃑ )∂λi ]λ⃑ =λ0⃑⃑⃑⃑ T , i=1,2,…,m将上式写成矩阵形式为f ( λ⃑ )=f 0⃑⃑ −A 0△λ⃑ (3-2) 式中 f 0⃑⃑ =f (λ0⃑⃑⃑ )=ρ0⃑⃑⃑⃑ −ρ⃑ (λ0⃑⃑⃑ )=∆ρ0⃑⃑⃑⃑A0=[a ij]=[−∂f i( λ⃑)∂λi]λ⃑=λ0⃑⃑⃑⃑=[−∂ρi( λ⃑)∂λi]λ⃑=λ0⃑⃑⃑⃑i = 1,2,…,m; j=1,2,…,n这样,利用式(3-2)将式(3-1)化为:‖∆ρ0⃑⃑⃑⃑ −A0Δλ⃑⃑⃑⃑ ‖2=极小 (3-3)根据函数的极值条件,可得如下方程组:A0T A0Δλ⃑⃑⃑⃑ −A0T∆ρ0⃑⃑⃑⃑ =0 (3-4)如果矩阵A0T A0满秩,则方程组(3-4)有唯一解Δλ⃑⃑⃑⃑ =(A0T A0)−1A0T∆ρ0⃑⃑⃑⃑ 令λ1⃑⃑⃑ =λ0⃑⃑⃑ +Δλ⃑⃑⃑⃑ ,λ1⃑⃑⃑ 便是解的首次近似,然后重复迭代,知道符合要求为止。
gp方案是什么意思

GP方案是什么意思简介在计算机科学和数学领域中,GP方案是指高斯-牛顿迭代模型,是一种非线性优化算法。
它结合了高斯牛顿方法和Levenberg-Marquardt算法的优点,用于解决非线性最小二乘问题。
GP方案通常用于拟合数据,建立模型和参数估计等领域。
GP方案详解高斯牛顿方法高斯牛顿方法是一种迭代算法,用于解决非线性最小二乘问题。
它基于线性化模型和最小二乘拟合原理,通过迭代优化来找到最优解。
高斯牛顿方法使用局部线性逼近来近似非线性函数,从而转化为线性最小二乘问题。
通过逐步迭代,每次迭代都近似求解线性模型的参数,最终达到收敛到最优解的目标。
Levenberg-Marquardt算法Levenberg-Marquardt算法是一种改良的高斯牛顿方法,用于解决非线性最小二乘问题。
与传统的高斯牛顿方法不同,Levenberg-Marquardt算法在迭代的过程中引入了一个衰减因子,用于权衡步长和准确性。
这个衰减因子可以有效地控制迭代的速度和稳定性,使得算法更加鲁棒。
GP方案的应用GP方案在很多领域都有广泛的应用,包括但不限于以下几个方面:1.拟合数据:GP方案通过拟合数据来建立数学模型,使得模型与实际数据尽可能地相符。
这对于数据分析、曲线拟合等应用非常重要。
2.建立模型:GP方案可以通过建立数学模型来描述和解释现象。
例如,在物理学中,GP方案可以用于建立物体运动、电磁场、流体力学等模型。
3.参数估计:GP方案通过最小化目标函数,求解模型参数的最优解。
这对于统计分析、机器学习等领域非常有用。
GP方案的优缺点GP方案作为一种非线性优化算法,具有以下优点:•高效性:GP方案采用迭代的方式,可以通过局部线性逼近快速收敛到最优解。
•鲁棒性:Levenberg-Marquardt算法的引入使得GP方案在有噪声数据、初始解不准确等情况下仍然能够稳定运行。
•广泛适应性:GP方案适用于各种类型的非线性最小二乘问题,可以应用于多个领域。
高斯—牛顿迭代法
高斯—牛顿迭代法高斯-牛顿迭代法是一种重要的数值解方法,它为解决复杂的非线性方程提供了一种有效的途径。
它结合了高斯原理和牛顿法的优势,利用高斯消元方法解出方程的一个精确解,从而有效地解决复杂的非线性方程组。
首先,我们来看看高斯-牛顿迭代法的基本思想。
很显然,这种迭代法是基于高斯原理以及牛顿法的思想。
根据高斯原理,可以得到每一个未知数的一个精确解。
而牛顿法则通过更新未知数的近似值,使得这个近似解更接近真实的解。
在这种思路的指导下,我们引入了高斯-牛顿迭代法,它具有非常高的效率和准确率。
其次,我们来看看高斯-牛顿迭代法的步骤以及具体实现过程。
高斯-牛顿迭代法的步骤主要有四步:首先,通过高斯消元算法求解出精确解;接着,通过求解线性方程组的近似解来更新未知数的初值;第三步,对更新的初值求解线性方程组,同时也计算出该近似解的梯度;最后,运用牛顿法更新未知数的近似值,并重复上述的求解步骤,直到收敛。
另外,在实际使用高斯-牛顿迭代法时,我们还需要考虑一些实际问题,例如对于牛顿迭代中未知数的初值选取,以及求解过程中收敛度控制等等。
不同的初值会影响最终求解过程的收敛速度和收敛精度,而牛顿法的收敛率又受到梯度的影响,因此,在实际应用中,需要考虑如何选择初值以及如何控制收敛度,这些问题都是高斯-牛顿迭代法内容中非常重要的一部分。
最后,我们来看看高斯-牛顿迭代法在实际应用中的一些典型案例。
在压力容器复合结构分析中,需要求解压力容器复合结构的有限元方程组,这其中含有大量非线性方程,而高斯牛顿迭代法可以有效地求解这样的问题;此外,高斯-牛顿迭代法也可以应用于组合优化的求解中,这类优化问题包括多目标优化、非线性约束优化等;另外,高斯牛顿迭代也可以用于求解动力系统中牛顿欧拉方程,如轨道飞行器动力学模型中的牛顿欧拉方程等。
总之,高斯-牛顿迭代法是一种有效的数值解方法,它结合了高斯原理和牛顿法的优势,可以有效地解决复杂的非线性方程组,而且具有收敛性好、效率高、准确率高的特点。
非线性最小二乘数据拟合高斯-牛顿法ppt课件.ppt

程序及做法:
function y=xzz(x); y(1)=x(1)+2 * x(2)+x(3); y(2)=2 * x(1)+2 * x(2)+3 * x(3)-3; y(3)=-x(1)-3 * x(2)-2; y=[y(1) y(2) y(3)]; x0=[1 1 1]; [x,fva1,exitflag,output]=fsolve(′xzz′,x0)
篮球比赛是根据运动队在规定的比赛 时间里 得分多 少来决 定胜负 的,因 此,篮 球比赛 的计时 计分系 统是一 种得分 类型的 系统Fra bibliotek2 解线性方程组
• MATLAB用函数linsolve求解线性方程组 Ax=b,要求A的列数等于b的行数;也可用 矩阵除等方法求解。linsolve的语法格式为
• x=linsolve(A,b)
篮球比赛是根据运动队在规定的比赛 时间里 得分多 少来决 定胜负 的,因 此,篮 球比赛 的计时 计分系 统是一 种得分 类型的 系统
[1/2/a * (-g+(g ^ 2-4 * 2 * c) ^ (1/2))]
[1/2/a * (-g+(g ^ 2+4 * 2 * c) ^ (1/2))] 类似地,solve (′2 * x ^ 2+6 * x+4′)
得 ans=[-2][-1]
g=a * x
篮球比赛是根据运动队在规定的比赛 时间里 得分多 少来决 定胜负 的,因 此,篮 球比赛 的计时 计分系 统是一 种得分 类型的 系统
补充知识 :解方程或方程组
用solve 符号解代数方程 solve (′eq1′,′eq2′, ′eqn′, ′var1,var2,…,varn′) eqn为符与方程,varn为符号变量。
高斯法和牛顿法
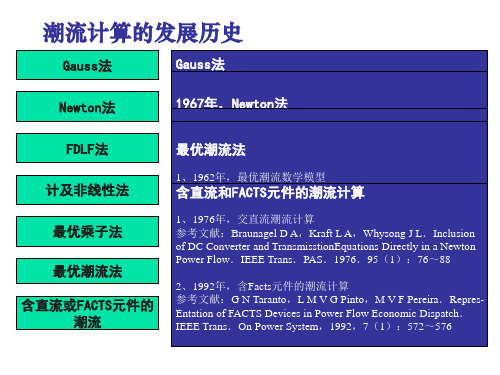
缺点: 本算法的主要缺点是收敛速度很慢。 病态条件系统,计算往往会发生收敛困难 节点间相位角差很大的重负荷系统; 包含有负电抗支路(如某些三绕组变压器或线路串联电 容等)的系统; 具有较长的辐射形线路的系统; 长线路与短线路接在同一节点上,而且长短线路的长 度比值又很大的系统。
此外,平衡节点所在位置的不同选择,也会影响到收敛性能。 目前高斯一塞德尔法已很少使用
牛顿一拉夫逊法
牛顿一拉夫逊法(简称牛顿法)在数学上是求解非线性代数 方程式的有效方法。其要点是把非线性方程式的求解过程变 成反复地对相应的线性方程式进行求解的过程,即通常所称 的逐次线性化过程。
y
y f (x)
第k+1步 迭代
下一步 迭代
y(k)
x(k )
o
x x (k 2) (k 1)
x(k)
x
PV节点 PQ节点
P1 H11
Q1
J11
QP22 Hn1
N 11 L11 N 21 L21 N p1
N n1
H12 J12 H 22 J 22 H p2
of Power Flow Pr-oblems.AIEE Trans,1956,75,III:398~404
该2参IP特参NN1参TP1R11最 1参E含tAA、、5erc、99eeoar法考点考考考8otwSSav优 直77na116nt--isit1411特文:文文文9~9o89vno9o66潮 流9年 年m23inmn6点献收献献献n123:(7’iges7年5年qP流 和, 和8t,::敛::9h13MuNo年o,9,~)ewodeP原性BTSIJ.F法F11wn.tA最e基ti:r0CA,D9honolr理好BaiSoICawL8tnnmA优于E8tdu-reeT保nF1简、85pEB.lpoyal潮阻6S9法 年eHEpt.r,单内onW:~i元留IaTtE流tE抗rySiSAr,、存,a18eaE.Fo,t件非数nrl矩46uE,sc.es内占49最Iast.T学aoE阵9Tc的线HaClan存用~E.rFnOm优a模ao的PEdrrn潮需量性Pn1.ou.ts型otwS4的r乘TCraw求大6FoyiEer的流bar0算ensaYEl子un较大rtAese.P.ttFs快计c法pim.o.l少增oDp法oPAwsnawe速算Po,r1、 加ecaaFAw潮9SrtoauM6lo算 (潮SuAe’ssl2re.p流utapa.法 限ttlFLyn流upieo1dl/doad8o收 制Jn9reaSu8w算La7bdyn(敛 解dty8osueSuFt.aI法es1性 题oml1dmDo0al99puwsFn)i差 规77es,tdldi(4poMo:模a1a,Swnnt59eycc.)b)6teshhyt3iMeoIn:,EmdgaEtsr,Eix 2参A1参T9参112参S3参参oP2参EiMf、、、、0095noohn、n考考考考考考考(187lwDrteRuaoE1111(17teCtth1ue文文文文文文文59999.~xiiroocog9)68799aCFtdnnh献献献献献献献)118462ca8lost:年年年年05nfooa.2no:::::::F:08gwfvM年r1,,,,(1auFI.eRSIDSBGs39ilEAilwrat最最交含274aunlart,oErI-LCeNsa64)anioEcmmECsrum优优直F~1oTooEDPTn包am:~aoainTSonzEnaad潮潮流c1oSdterIagrdtAD319ora,il括sFaTtdetN流流潮278ni元TnieHlSolriMo631soeanavtrnD,.二on的计流86tawgn件aiW,ac,en~TetslATeePds简算计.Mn.的e,阶essmAaL,1dcPt.mei化的算aPh7Or潮SiTonMtaslA项Kn4uh.iI.wps,梯牛nPi3E流roStrtqVaeiniaodE1I的.ouRmr度顿efmw计Y9nEetGIyaSa6n1.Eep.Lo快法算ly算T8Wcr9rPqsPAol.Kr7IFAuitu法aEvone速6,FladnoSemwt8E.Lt.oisdiw7nE. Wooes,P潮(g9.ranNOrET5hdaPsFMSep1rc(流kyAIlewDaFtE0oasicnSVln)omsw1Etioos算or.aon)Ee.wnaFn,:mgbcld’1y:T法tsPCPiJPlN91OcryAeNLoaL8a87arrDlwoSin2ee6.dn6cnas.iw.i6uede~rs.darr~Ilaaptano1.T8FFNatJPcn91i8tell.Aloecoo7R8runwhmww1S7se.i.6t.psoornnes-
牛顿法和高斯牛顿法的差别
牛顿法和高斯牛顿法的差别牛顿法和高斯牛顿法都是解决优化问题或方程组求解的方法。
二者的目标都是找到某个使得目标函数最小或最大的值的参数集合,而这个目标函数通常是由一些数据得到的。
不过,牛顿法和高斯牛顿法在实现上还是存在一些差别的。
在以下文章中,我们将就牛顿法和高斯牛顿法的差别做文章。
我们将首先介绍牛顿法,并简述它如何工作。
接着我们将谈到高斯牛顿法,并分析这两种方法之间的异同点。
最后,我们还会介绍如何在处理大规模数据方面更加适合使用高斯牛顿法。
牛顿法牛顿法是求解未知数的方程的一种迭代方法。
在优化中,牛顿法通常用于寻找最小二乘解。
最小二乘解是一种最小化误差的解决方案,即使存在测量误差也能找到一个最优的参数集合。
对于这样的方程,牛顿法它基于以下的迭代式来更新变量。
$x_{n+1} = x_n - \frac{f(x_n)}{f'(x_n)}$其中 $f(x_n)$ 和 $f'(x_n)$ 分别是函数 $f$ 在点 $x_n$ 处的值和导数。
这个迭代式是逐步优化 $x_n$ 的值,以使 $f(x)$ 的值接近于零。
牛顿法虽然在一些问题中表现得很好,但在其他领域却可能会遭遇困难。
一个常见的问题是,$f'(x)$ 可能无法计算或很难计算。
在这种情况下,我们可以考虑使用高斯牛顿法。
高斯牛顿法是解决最小二乘问题的一种方法,它通过迭代来计算最优参数集合。
与牛顿法不同的是,它不能直接计算出 $f'(x)$ ,因为目标函数是由多个变量组成的,而不是一个单独的变量。
因此,高斯牛顿法通过利用一些统计技术来逐步优化参数集合。
具体来说,高斯牛顿法的迭代形式是:其中,$J_n$ 是目标函数的雅可比矩阵,$J_n^T$ 是雅可比矩阵的转置矩阵,$f_n$ 是目标函数的向量,$(J_n^TJ_n)^{-1}$ 表示逆矩阵。
高斯牛顿法逐步缩小误差而不是逐步与实际函数相符合。
这个方法对于大规模数据处理比较适用,但它通常需要先确定一个初始值,然后通过迭代逐步优化。
GaussNewton

李智迅
1
1.1 牛顿迭代法
预备知识
牛顿法是一种求解方程f (x) = 0的方法。 多数方程不存在求根公式,从而求精确根非常困难,甚 至不可能,从而寻找方程的近似根就显得特别重要。 迭代法是用某个固定公式反复地计算,用以校正 方程所得根的近似值,使之逐步精确化,最后得到的精度要求的结果。 牛顿迭代法是用切线来逼近零点的,收敛的速度很快,但要求的条件也高。 首先要有一个区间, 在这个区间的端点函数值反向,其次第一次迭代点不能随意取,否则第一次迭代后的点可能跑出原先 的区间,收敛性就不一定能保证了(即有的情况也能有收敛性,有的情况就没有收敛性了,全看函数 的性能) 。 比如:设r是f (x) = 0的根,选取x0 作为r初始近似值,过点(x0 , f (x0 ))做曲线y = f (x)的切线L, L的方程为y = f (x0 ) + f ′ (x0 )(x − x0 ),求出L与x轴交点的横坐标x1 = x0 − f (x0 )/f ′ (x0 ), 称x1 为r的一次 近似值,过点(x1 , f (x1 ))做曲线y = f (x)的切线,并求该切线与x轴的横坐标x2 = x1 − f (x1 )/f ′ (x1 )称x2 为r的二次近似值,重复以上过程,得r 的近似值序列Xn ,其中Xn+1 =Xn −f (Xn )/f ′ (Xn ),称为r的n+1次 近似值。上式称为牛顿迭代公式。以f (x) = 2x3 − 4x2 + 3x − 6为例: #include<stdio.h> #include <math.h> //包含这个头文件,后面使用fabs void main() { double x=1.5,y,y1; do { y=2*x*x*x-4*x*x+3*x-6; y1=6*x*x-8*x+3; x=x-y/y1; } while(fabs(y/y1)>1e-6);// 是y/y1,不是y printf("%f",x); }
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
c=Fk-1/Fk+1 d=Fk/Fk+1
Fibonacci(1170-1250)
达.芬奇与黄金分割
黄金分割法:
给出[0, 1]: X=0.382 Y=0.618
新区间: [0, 0.618] or [0.382, 1]
一个 n 维问题 转化为 n 个 一维问题
共轭梯度法的实现
著名的β选取:
Hestenes (1906-1991)
Stiefel (1909-1978)
新的共轭梯度法
Dai-Yuan(1999) More methods by Hager-Zhang, etc..
牛顿法巧 -- 复杂问题简单化
黄金分割法
黄金分割法
华罗庚(1910-1985)
华罗庚在农村推广优选法
华罗庚在大庆油田讲优选法
华罗庚在矿山推广优选法
华罗庚在工厂、车间
Max f(x)
[a, b] 上的连续函数 f(x) 是单峰的(只有 一个最大值点), 求解 max f(x)
任取 a<c<d<b, 如果 f( c ) < f(d) , 则 我们只需在 [c, b] 上求 max f(x)
瞎子爬山 vs 优化方法
瞎子和计算机谁快? 瞎子和计算机谁聪明? 瞎子会如何“看” “瞎子爬山法”呢?
优化方法的特征
基于极小 ( min f(x) )
基于KKT 条件 (
)
迭代
迭代 - 计算的基本
千里之行始于足下 ---老子
几个经典优化方法
黄金分割法 最速下降法 共轭梯度法 牛顿法与拟牛顿法 高斯牛顿法与信赖域方法 单纯形法与内点法 交替方向法
Levenberg-Marquardt 方法
当 A 坏条件时 高斯-牛顿步 很可能不好。 Levenberg (1944), Marquardt(1963) 提出:
L-M步的最优性
设 dk 是 Levenberg-Marquardt 步:
则它也是如下问题的解
信赖域方法
信赖域方法基本思想 1) 局部区域 2) 逼近模型 3) 调节模型和区域
牛顿法:切线代替曲线
Newton(1643-1727)
牛顿法求f(x)=0 的根
牛顿法性质
迭代公式:
优缺点: 1) 优点:速度快(二次收敛)
2) 缺点: 计算量大(需要计算二阶导数)
牛顿:
拟牛顿法
拟牛顿:
如何选取 B?
如何“拟”牛顿?
拟牛顿方程:
Davidon(1959), Fletcher and Powell (1963):
Fletcher(1939- ) Powell(1936- )
N. Trefethen: Who invented the great numerical algorithms?
依葫芦画瓢 – 都行吗?(∞的故事)
Question:
limx0+ 5/x = ?
8
because limx0+ 8/x = limx0+ 5 / x =
Leonardo da Vince (1452-1519)
Euclid (约325BC—265BC)
extreme and mean ratio
最速下降法
最速下降法
αk 使 f(x+αd ) 达到最小 (精确搜索)
A. Cauchy, Comptes Rendus de L’Acadmia des Sciences 25(1847) 536-538
BB方法的启示
最好方向 + 上一次最好步长 = 最好
推论:
班上最好的女生应该嫁给 高年级最好的男生!
共轭梯度法
共轭梯度法
αk 使 f(x+αd ) 达到最小 (精确搜索)
如何选取 dk?
共轭梯度法
前后两次的方向 d 相互共轭
共轭梯度法基本思想
考虑 f(x) = (1/2) xTAx – bTx 共轭方向 d1,d2,…,dn
孙悟空的信赖域
单纯形法与内点法
线性规划:单纯形法
Linear Programming (LP) Problem:
min cT x Ax=b x≥0
单纯形方法
逐步调整N 得到解 G. Dantzig(1914-2005)
引子:瞎子爬山
爬山与优化
爬山 --- 海拔“最”高 最优化 --- 求“最”好的
Operations Research -- Science of Better
瞎子与计算机
瞎子 --- 知道脚底下情况, 但看不见周围的东西
计算机 ---
给一个点x,可计算:
f(x), ∂f(x), … … 但对于x 附近的其他y, 不知道 f(y)
5
高斯牛顿法与信赖域法
非线性最小二乘问题
最小二乘问题
超定方程组求解
数值模拟,曲线拟合
反问题
高斯-牛顿法
xk+1 = xk + dk , 如何求 dk ?
A(x) 是 F(x) 的 JACOBI 阵
J. C. F. Gauss (1777-1855)
I. Newton (1642-1727)
如何 选取 c , d ?
最优的 c, d
1) max[b-c, d-a] 达到最小
c ≈ d = (a+b)/2 !
2) Repeat the procedure ? Once c=1/3 , d=2/3 Twice c=2/5, d=3/5?
菲波那契级数(兔子繁殖问题)
一般的 c, d
Cauchy(1789-1859)
最速下降法收敛速度
假定 f(x) 是二次凸函数
收敛速度:
最好 + 最好 = 最好 ???
方向 (最速下降) (best dk)
步长 (精确搜索) (best αk ) xk+1 = xk + αk dk 是否最好 ????
最速下降法应用于 f(x,y)=100x2+ y2
最速下降法的启示
最好方向 + 最好步长 ≠ 最好的方法 推论:
班上最好的女生不应该嫁给 班上最好的男生!
Barzilai & Borwein Method
方向 (最速下降 - 最好方向)
步长 (上一次的精确搜索步长)
最好的d + 上一步最好的α 最好
J.M. Borwein(1951-
BB 方法 应用于 f(x,y)=100x2+ y2