数字信号处理第三版(高西全丁玉美)信号处理章总结
数字信号处理 第三版 (高西全 丁玉美)信号处理5章

在通带和阻带内均为等
波纹幅频特性
第5章 无限长单位脉冲响应(IIR)数字滤波器的设计方法
典型滤波器的幅度平方函数都有自己的表达式,可以直接 引用,而设计的最终目的是确定系统函数Ha(s) 。 5.3.1 幅度平方函数确定系统函数
模拟滤波器幅度响应常用幅度平方函数|Ha(jΩ)|2表示
* | Ha ( j) |2 Ha ( j)Ha ( j)
以右图低通为例, 频率响应包括
通带、过渡带与阻带
1(2) 为通 ( 阻 ) 带的容限 ,
p(s)
为通(阻)带截止频率
p
s
第5章 无限长单位脉冲响应(IIR)数字滤波器的设计方法
通带允许的最大衰减(波纹)Ap和阻带应达到的最小衰减As
| H (e j 0 ) | j p Ap 20 lg 20 lg | H ( e ) | 20 lg(1 1 ) j p | H (e ) | 式中 |H(ej0)|=1 | H (e j 0 ) | (归一化) j s As 20 lg 20 lg | H ( e ) | 20 lg 2 | H (e js ) |
•
根据阶数N,查表得到归一化系统函数HaN(s)
•
根据Ωc将HaN(s)去归一化,得到实际要求的系统函数Ha(s)
Ha (s) HaN s c
第5章 无限长单位脉冲响应(IIR)数字滤波器的设计方法
•
低通巴特沃思滤波器设计步骤总结 step1: 已知Ωp, Ap,Ωs和As,计算滤波器阶数N和截止频率Ωc
k b z k
H ( z)
1 ak z k
k 1
k 0 N
第5章 无限长单位脉冲响应(IIR)数字滤波器的设计方法
数字信号处理(第三版)高西全丁玉美课后答案.

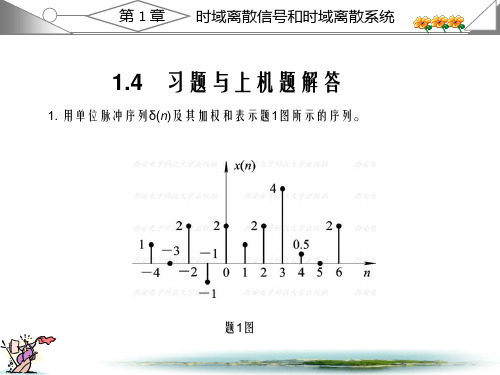
西安电子(高西全丁美玉第三版)数字信号处理课后答案1.2 教材第一章习题解答1. 用单位脉冲序列()n δ及其加权和表示题1图所示的序列。
解:()(4)2(2)(1)2()(1)2(2)4(3)0.5(4)2(6)x n n n n n n n n n n δδδδδδδδδ=+++-+++-+-+-+-+-2. 给定信号:25,41()6,040,n n x n n +-≤≤-⎧⎪=≤≤⎨⎪⎩其它(1)画出()x n 序列的波形,标上各序列的值; (2)试用延迟单位脉冲序列及其加权和表示()x n 序列; (3)令1()2(2)x n x n =-,试画出1()x n 波形; (4)令2()2(2)x n x n =+,试画出2()x n 波形; (5)令3()2(2)x n x n =-,试画出3()x n 波形。
解:(1)x(n)的波形如题2解图(一)所示。
(2)()3(4)(3)(2)3(1)6()6(1)6(2)6(3)6(4)x n n n n n n n n n n δδδδδδδδδ=-+-+++++++-+-+-+-(3)1()x n 的波形是x(n)的波形右移2位,在乘以2,画出图形如题2解图(二)所示。
(4)2()x n 的波形是x(n)的波形左移2位,在乘以2,画出图形如题2解图(三)所示。
(5)画3()x n 时,先画x(-n)的波形,然后再右移2位,3()x n 波形如题2解图(四)所示。
3. 判断下面的序列是否是周期的,若是周期的,确定其周期。
(1)3()cos()78x n A n ππ=-,A 是常数;(2)1()8()j n x n eπ-=。
解:(1)3214,73w w ππ==,这是有理数,因此是周期序列,周期是T=14; (2)12,168w wππ==,这是无理数,因此是非周期序列。
5. 设系统分别用下面的差分方程描述,()x n 与()y n 分别表示系统输入和输出,判断系统是否是线性非时变的。
高西全-丁玉美-数字信号处理课件(第三版)

出版信息
出版社:清华大学出版社 出版时间:2019年 作者:王志强、李志刚、张志强 内容简介:本书主要介绍数字信号处理的基本概念、原理和方法,以及其在通信、雷达、 图像处理等领域的应用。
主要内容
数字信号处理的 基本概念和原理
数字信号处理的 应用领域
数字信号处理的 算法和实现
数字信号处理的 发展趋势和挑战
感谢观看
汇报人:PPT
信号处理在音频处理中的应用
添加标题
添加标题
信号处理在图像处理中的应用
添加标题
添加标题
信号处理在雷达系统中的应用
04
学习资源
习题答案
教材配套习题 答案
教师提供的习 题答案
网络资源: 如CSDN、 GitHub等
同学之间的互 助解答
教学PPT
课件形式:图文并茂,动 画演示,互动问答等
课件内容:数字信号处理 基础知识、应用案例、实 验操作等
课件特点:简洁明了,逻 辑清晰,易于理解
课件下载:提供课件下载 链接,方便学生课后复习
和预习
学习笔记
教材:数字信号处理课件(第三 版)
学习资料:教材、课件、实验指 导书、习题集等
添加标题
添加标题
添加标题
添加标题
课程内容:数字信号处理基础知 识、数字信号处理算法、数字信 号处理应用等
学习工具:MATLAB、Python 等编程工具,数字信号处理软件 等
实验指导书
实验目的:掌握数字信号处理的基本概念和原理 实验内容:包括信号的采样、量化、编码、传输、解码等 实验步骤:详细描述每个实验的步骤和注意事项 实验结果:对实验结果进行分析和讨论,提出改进意见
05
使用指南
数字信号处理西安电子高西全丁美玉第三版课后习题答案全1-7章
(4) 令x1(n)=xe(n)+xo(n), 将x1(n)与x(n)进行比较, 你能得
第 1 章 时域离散信号和时域离散系统
解:(1) x(-n)的波形如题4 (2) 将x(n)与x(-n)的波形对应相加, 再除以2, 得到xe(n)。 毫无疑问, 这是 一个偶对称序列。 xe(n)的波形如题4解图(二)所示。 (3) 画出xo(n)的波形如题4解图(三)所示。
第 1 章 时域离散信号和时域离散系统
题4解图(一)
第 1 章 时域离散信号和时域离散系统
题4解图(二)
第 1 章 时域离散信号和时域离散系统
题4解图(三)
第 1 章 时域离散信号和时域离散系统
(4) 很容易证明: x(n)=x1(n)=xe(n)+xo(n)
上面等式说明实序列可以分解成偶对称序列和奇对称序列。 偶对称序列可 以用题中(2)的公式计算, 奇对称序列可以用题中(3)的公式计算。
0≤m≤3 -4≤m≤n
非零区间如下:
第 1 章 时域离散信号和时域离散系统
根据非零区间, 将n分成四种情况求解: ① n<0时, y(n)=0
② 0≤n≤3时, y(n)= ③ 4≤n≤7时, y(n)= ④ n>7时, y(n)=0
1=n+1
n
1=8-m n0
3
m n4
第 1 章 时域离散信号和时域离散系统
因此系统是非时变系统。
第 1 章 时域离散信号和时域离散系统
(5) y(n)=x2(n)
令输入为
输出为
x(n-n0)
y′(n)=x2(n-n0) y(n-n0)=x2(n-n0)=y′(n) 故系统是非时变系统。 由于
西安电子(高西全丁美玉第三版)数字信号处理部分课后答案Word版 - 副本

第一章习题解答2. 给定信号:25,41()6,040,n n x n n +-≤≤-⎧⎪=≤≤⎨⎪⎩其它(1)画出()x n 序列的波形,标上各序列的值; (2)试用延迟单位脉冲序列及其加权和表示()x n 序列; (3)令1()2(2)x n x n =-,试画出1()x n 波形; (4)令2()2(2)x n x n =+,试画出2()x n 波形; (5)令3()2(2)x n x n =-,试画出3()x n 波形。
解: (1)x(n)的波形如题2解图(一)所示。
(2)()3(4)(3)(2)3(1)6()6(1)6(2)6(3)6(4)x n n n n n n n n n n δδδδδδδδδ=-+-+++++++-+-+-+-(3)1()x n 的波形是x(n)的波形右移2位,在乘以2,画出图形如题2解图(二)所示。
(4)2()x n 的波形是x(n)的波形左移2位,在乘以2,画出图形如题2解图(三)所示。
(5)画3()x n 时,先画x(-n)的波形,然后再右移2位,3()x n 波形如题2解图(四)所示。
5. 设系统分别用下面的差分方程描述,()x n 与()y n 分别表示系统输入和输出,判断系统是否是线性非时变的。
(5)2()()y n x n =; (6)y (n )=x (n 2)解:(5) 2()()y n x n = 令:输入为0()x n n -,输出为'20()()y n x n n =-,因为2'00()()()y n n x n n y n -=-=故系统是时不变系统。
又因为21212122212[()()](()()) [()][()] ()()T ax n bx n ax n bx n aT x n bT x n ax n bx n +=+≠+=+因此系统是非线性系统。
(6) y (n )=x (n 2) 令输入为x (n -n 0) 输出为y ′(n )=x ((n -n 0)2)y (n -n 0)=x ((n -n 0)2)=y ′(n)故系统是非时变系统。
数字信号处理【高西全 丁玉美编著】第一章总结

-------------------数字信号处理--------------------通信1103班--------------------Chapter 1 第一章温馨提示:亲爱的小伙伴们,在这个总结中我只是把我自己认为重要的总结了下来,仅供参考哦~~~ 1.1 引言信号分为三类:1)模拟信号:自变量和函数值都是连续的。
2)时域离散信号:自变量离散,函数值连续。
它来源于对数字信号的采样。
3)数字信号:自变量和函数值都是离散的。
它是幅度化的时域离散信号。
1.2 时域离散信号知识点1:模拟信号(时域连续,-------)经过“采样”变成时域离散信号,公式是:x(n)=x a (nT),-∞<n <∞可能会考:已知x a (t)表达式,和采样频率fs (或采样周期T=fs1),求时域离散信 号x(n)。
解答:用nT(即fsn1)替换t ,整理就可。
知识点2:常用典型序列(时域离散信号): 1))(n δ和)(n u 不赘述;2) 矩形序列)(n R N =u )(n -u )(N n -:(N 是矩形序列的长度)实指数序列:a n x =)(n )(n u ,a 为实数。
3) 正弦序列:)sin()(n n x ω=,ω是“数字域频率”,单位是弧度(rad )。
如果正弦序列是由模拟信号)sin()(t t x a Ω=采样得到,则)sin()(nT n x ω=,对比 两个)(n x 的表达式,可得ss s F f F fF T ππω22==Ω=Ω=(ω表示数字域频率,Ω和f 表示模拟角频率和模拟频率,s F 是采样频率)由此公式得到以下结论:(进一步理解)①上式表示数字域频率是模拟角频率对采样频率的归一化频率。
②数字域频率无绝对意义,因其与采样频率有关,采样频率变大时,数字域频率变小。
③因为采样频率s F ≥2倍的模拟频率f ,所以数字域ω不会超过π。
4)复指数序列不赘述,但要注意其周期性(2π)。
数字信号处理课后答案+第2章(高西全丁美玉第三版)
X (e j ) 1 cos 2
当π≤ω≤2π时, X(ejω)=0, 故
1 cos 2 X (e ) 0
j
0≤ω≤π π≤ω≤2π
第2章
时域离散信号和系统的频域分析
因此
Re[X(ejω)]=X(ejω) Im[X(ejω)]=0 [例2.4.3] 已知 0≤n≤N N+1≤n≤2N n<0, 2N<n
0≤|a|<1, 0≤|b|<1
第2章
时域离散信号和系统的频域分析
在z域进行分析问题会感到既灵活又方便。 离散傅里叶
变换是离散化的傅里叶变换, 因此用计算机分析和处理信
号时, 全用离散傅里叶变换进行。 离散傅里叶变换具有快 速算法FFT, 使离散傅里叶变换在应用中更加方便与广泛。
但是离散傅里叶变换不同于傅里叶变换和Z变换, 它将信号
(1) FT的逆变换为
1 x(n) 2π
π
-π
X (e j )e jn d
用留数定理求其逆变换, 或者将z=ejω代入X(ejω)中, 得到X(z)函数, 再用求逆Z变换的方法求原序列。 注意收 敛域要取能包含单位圆的收敛域, 或者说封闭曲线c可取
单位圆。
第2章
时域离散信号和系统的频域分析
1 xe (n) [ x(n) x (n)] 2
1 xo (n) [ x(n) x (n)] 2
第2章
时域离散信号和系统的频域分析
式中, xe(n)和xo(n)是序列x(n)的共轭对称序列和共轭反对称序
列, 常用以求序列的xe(n)和xo(n)。 (7)
X ( z)
n
这两式是周期序列的离散傅里叶级数变换对, 可用以 表现周期序列的频谱特性。
数字信号处理第三版(高西全丁玉美)信号处理章

第4章 数字滤波器的基本结构 2. 离散时间系统结构的信号流图表示法
第4章 数字滤波器的基本结构 2. 离散时间系统结构的信号流图表示法 例 二阶数字滤波器系统的信号流图可表示为
信号流图与方框图完全等效,但是画起来要更简单些
1 直接型 (Ⅰ型)
N阶的IIR滤波器的差分方程表示如下
M
N
y(n) bi x(n i) ai y(n i)
i0
i 1
令M=N时,方程对应的信号流图可表示成
第4章 数字滤波器的基本结构
M
N
y(n) bi x(n i) ai y(n i)
i0
i 1
直接I型结构
M
H (z)
Y (z) X (z)
第4章 数字滤波器的基本结构 直接型(II型 )---结构特点
➢ 两个网络级联,第一个有反馈的N节延时网络实现极点,第二 个横向结构M节延时网络实现零点。
➢ 实现N阶滤波器(N>=M),只需N级延时单元。所需延时单元 最少,故称典范型。
➢ 具有直接型实现的一般缺点。
第4章 数字滤波器的基本结构
系统函数为
bk z k
k 0
N
ak zk
k 0
第4章 数字滤波器的基本结构 直接型(I型 )---结构特点
➢ 两个网络级联,第一个横向结构M节延时网络实现零点,第二 个有反馈的N节延时网络实现极点。
➢ 共需(N+M)级延时单元。 ➢ 系数ai,bi不是直接决定单个零极点,因而不能很好地进行滤波
器性能控制。 ➢ 极点对系数的变化过于灵敏,从而使系统频率响应对系数变化
M
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
每个二阶节系数单独控制一对零点或一对极点,有利于控制频率响应。
分子分母中二阶因子配合成基本二阶节的方式,以及各二阶节的排列次序不
同。级联后面的网络输出不会再流到前面,运算误差的积累相对直接型也小。
第4章 数字滤波器的基本结构 【例5.3.2】 设系统函数H(z)如下式:
8 4 z 1 11z 2 2 z 3 H ( z) 1 1.25z 1 0.75z 2 0.125z 3
解 将H(z)的分子、分母进行因式分解,得到:
(2 0.379z 1 )(4 1.24z 1 5.264z 2 ) H ( z) (1 0.25z 1 )(1 z 1 0.5z 2 )
为减少单位延迟的数目,将一阶的分子、分母多项式组成一个一阶 网络,二阶的分子、分母多项式组成一个二阶网络。
将IIR滤波器的系统函数H(z) 的分子和分母进行因式分解
H ( z)
bi z
i 0 N i 1
M
i
1 ai z i
A
1 (1 C z ) r 1 (1 d z r ) r 1 r 1 N
M
H(z)的系数ai,bi都是实数,所以零、极点Cr.dr只有两种情况:
第4章 数字滤波器的基本结构 3 级联型
H ( z) A
(1 Cr z )
1 1 (1 d z r ) r 1 r 1 N
M
=A
1 * 1 (1 g z ) (1 h z )(1 h r r r z ) 1 1 1 * 1 (1 p z ) (1 q z )(1 q r r r z ) r 1 r 1 r 1 N1 r 1 N2
第4章 数字滤波器的基本结构
2. 直接型(II型 )---正准型结构 y (n) bi x(n 1) ai y (n i )
i 0 i 1
N
N
直接I型结构
H(z)=H1(z)· Hz(z)
直接型结构简单直观
对于高阶系统, 存在调整零、 极点困难, 对系数量化效应敏感度高等缺点
B=[b0, b1, b2, …, bM]
第4章 数字滤波器的基本结构
例题:
已知IIR DF系统函数,画出直接I型,直接II型的结构流图。
8 z 4 z 11z 2 H ( z) 1 2 1 ( z )( z z ) 4 2
3 2
第4章 数字滤波器的基本结构 3 级联型
器的响应特性
第4章 数 它的每一个基本节只关系到滤波器的某一对极点和一对零点。 调整
1i , 2i 只单独调整滤波器第i对零点,而不影响其他零点。
1i , 2i 只单独调整滤波器第i对极点,不影响其他极点。
同样调整
结构特点:
×10 1 10 0
5 ×105
2 2 00 00 0 0
4 4 00 00 0 0 ( 信号淹没在啸叫噪声中 (a a) )
6 6 00 00 0 0
t t 8 00 0 8 00 0
5 5 0 00 0
5 ×10 5 ×10 2 2
1 1 00 00 0 0
2 2 00 00 0 0 ( 信号与噪声的功率谱 (b b) )
实根,或共轭复根
H ( z) A
(1 C z
r 1 N r r 1
M
1
) =A
(1 g z ) (1 h z
1 r 1 N1 r r 1 N2 r r 1 r 1
M1
M2
1
)(1 hr * z 1 )
1 (1 d z r )
1 1 * 1 (1 p z ) (1 q z )(1 q r r r z )
型(I型、II型)、级联型与并联型
1 直接型 (Ⅰ型)
N阶的IIR滤波器的差分方程表示如下
y(n) bi x(n i) ai y(n i)
i 0 i 1
M
N
令M=N时,方程对应的信号流图可表示成
第4章 数字滤波器的基本结构
y(n) bi x(n i) ai y(n i)
第4章 数字滤波器的基本结构
直接型(II型 )---结构特点
两个网络级联,第一个有反馈的 N节延时网络实现极点,第二
个横向结构M节延时网络实现零点。
实现N阶滤波器(N>=M),只需N级延时单元。所需延时单元 最少,故称典范型。 具有直接型实现的一般缺点。
第4章 数字滤波器的基本结构
系统函数为
第4章 数字滤波器的基本结构
4.1 数字滤波器的结构特点与表示方法
受噪声污染信号消除噪声的过程
选择数字滤波器(LP, HP, BP, BE) 设计数字滤波器:H(z)(第五章IIR,第六章FIR) 实现数字滤波器(第四章)
第4章 数字滤波器的基本结构
2 2 00 00 0 0 - -2 2 00 00 0 0
• 数字滤波器的分类:
从功能上分:低通、带通、高通、带阻。 从实现方法上分:FIR,IIR。 从设计方法上分:Chebyshev(切比雪夫), Butterworth(巴特沃斯)。 从处理信号分:经典滤波器、现代滤波器等。
第4章 数字滤波器的基本结构
4.1 数字滤波器的结构特点与表示方法
M
H ( z)
1 ai z i
i 1
i 0 N
0 j 1 j z 1 2 j z 2 H j ( z) 1 2 1 z z j 1 j 1 1j 2j
K
把H(z)表示成多个实系数的二阶数字网络Hj(z)的连乘积形式
每个Hj(z)均采用直接Ⅱ型结构,则可以得到H(z)的级联型结构
H ( z)
i b z i i a z i i 0 i 0 N
M
MATLAB 信号处理工具箱函数filter就是按照直接型结构实现滤波器。
yn=filter(B, A.xn)
计算系统对输入信号向量xn的零状态响应输出信号向量yn,yn与xn
A=[a0, a1, a2, …, aN],
(只为各二阶节网络的零点,并非整个系统函
数的零点)。且滤波器阶数较高时, 部分分式展 开比较麻烦。
在运算误差上, 则比前面几种结构要小一些。
3 3 00 00 0 0
4 4 00 00 0 0
f f
1 1 0 00 0 2 2 00 00 0 0 - -2 2 00 00 0 0 2 2 00 00 0 0 4 4 00 00 0 0 6 6 00 00 0 0 8 8 00 00 0 0 t t
f 2 fs 4
2 2 00 00
第4章 数字滤波器的基本结构
4 并联型 把H(z)展开成部分分式和的形式,即得到滤波器的并联型结构
F Ai 0i 1i z 1 H ( z ) A0 1 1 2 1 p z 1 z z i 1 i 1 i 1i 2i E
在零点调整上 , 并联型结构不如级联型方便,
结构的不同将会影响系统的精度、误差、稳定性、经济性以
及运算速度等性能
数字滤波器(DF)的结构实现借助于方框图和信号流图表示
第4章 数字滤波器的基本结构 1. 离散时间系统结构的方框图表示法 数字滤波器可以用系统函数表示为
由H(z)可以得到表示系统输入与输出关系的差分方程为
基本运算包括:信号相加、信号与常数相乘以及时移
i 0 i 1
M
N
直接I型结构
H ( z)
Y ( z) X ( z)
k b z k k a z k k 0 k 0 N
M
第4章 数字滤波器的基本结构
直接型(I型 )---结构特点
两个网络级联,第一个横向结构 M节延时网络实现零点,第二
个有反馈的N节延时网络实现极点。
共需(N+M)级延时单元。 系数 ai,bi不是直接决定单个零极点,因而不能很好地进行滤波 器性能控制。 极点对系数的变化过于灵敏,从而使系统频率响应对系数变化 过于灵敏,也就是对有限精度(有限字长)运算过于灵敏,容 易出现不稳定或产生较大误差。
第4章 数字滤波器的基本结构
级联型结构
0 j 1 j z 1 2 j z 2 H ( z) 1 2 1 z z j 1 1j 2j
K
如果以不同方式将分母和分子的二阶因式组合,理论上可以得到多种等
效的系统结构
级联型结构的特点是对滤波器零、极点的调整比较方便,便于调整滤波
•“无限长单位脉冲响应(IIR)DF”:
系统的h(n)延伸到无穷长
•“有限长单位脉冲响应(FIR)DF”:系统的h(n)为有限长序列
FIR DF的差分方程与系统函数表示式(非递归型结构)
y (n) bk x(n k )
k 0
M
H ( z ) bk z k
k 0
k b z k k a z k k 0 k 0 N M
4 4 00 00 ( (c c) )
2500 2 8000
6 6 00 00
8 8 00 00
2 f T
1 1 00 00 0 0
f f
第4章 数字滤波器的基本结构
设计数字滤波器(DF)即是求系统函数H(z)
同一个系统函数H(z)实现方法有多种。软件,硬件,IIR, FIR
• 现代滤波器:
从含有噪声的数据记录(时间序列)中估计出信号的 某些特征及信号本身。一旦信号被估计出,估计出的 信号将比原信号会有高的信噪比。 将信号和噪声视为随机信号,利用他们的统计特性( 自相关函数,功率谱等)导出一套最佳估计算法,然 后用硬件或软件实现。 现代滤波器源于维纳20世纪40年代及以后的工作,这 类滤波器的代表为:维纳滤波器,卡尔曼滤波器,线 性预测器,自适应滤波器。