51单片机MOVX指令详细执行过程
51单片机指令使用方法

51单片机指令使用方法51单片机是一种常用的嵌入式微控制器,广泛应用于各种电子设备中。
它具有强大的控制能力和灵活的指令集,为我们开发各种应用提供了便利。
在使用51单片机时,我们需要熟悉其指令的使用方法,下面我们来介绍一些常用的指令及其应用。
首先,我们来讲解一些与数据传输和处理相关的指令。
MOV指令是最常用的指令之一,用于将一个数据从一个寄存器或内存单元传输到另一个寄存器或内存单元。
通过MOV指令,我们可以在单片机中实现数据的复制、传递和处理等操作。
除了MOV指令,还有一些其他常用的数据传输和处理指令,比如ADD指令用于进行加法运算,AND指令用于进行逻辑与操作,OR指令用于进行逻辑或操作等。
这些指令可以实现各种数据处理、逻辑运算和位操作等功能,为我们的程序提供灵活性和多样性。
接下来,我们介绍一些与控制流程相关的指令。
循环结构是程序中常用的一种控制结构,而JMP指令和CJNE指令可以实现跳转和循环控制。
JMP指令用于无条件跳转到指定的地址,而CJNE指令则根据比较结果决定是否跳转到指定的地址。
通过这些指令,我们可以实现程序的分支、循环和条件控制等功能。
此外,还有一些与中断处理相关的指令需要我们熟悉。
中断是单片机中常用的一种事件触发机制,通过中断处理,我们可以实现对外部事件的及时响应。
EA指令用于使能全局中断,而EN和DIS指令用于使能和禁止外部中断。
通过这些指令,我们可以合理利用中断机制,提高程序的响应速度和实时性。
最后,我们来介绍一些与IO口操作相关的指令。
单片机的IO口是与外部设备进行通信的接口,而P1、P2等寄存器则是与IO口对应的数据寄存器。
通过MOV指令和SETB/C指令,我们可以实现对IO口数据的读写操作和控制。
通过这些指令,我们可以与外部设备进行数据交互,实现各种输入输出功能。
总结起来,51单片机的指令使用是嵌入式开发中的基础知识,熟练掌握各种指令的使用方法能够提高我们的开发效率和程序的性能。
由MOVX指令深入分析51单片机总线时序及扩展
1 MC S 5 1单 片 机 系 统 的 四要 素
1 . 1 5 1单 片 机 系 统 的 启 动
MC S 5 1单 片 机 上 电 正 常 工 作 , 需具 备 以下 四点 : ( 1 ) 电 源 。A T 8 9 S 5 1系 列单 片机 的 第 4 0引 脚 为 V 外
加电压 5 V工 作 电 压 ,另 外 ,单 片 机 的 第 2 0 引 脚 是
中 图 分 类 号 :T P 3 1 3 文 献 标 识 码 :A 文 章 编 号 :1 6 7 4 — 7 7 2 0 ( 2 0 1 3 ) 2 0 — 0 0 0 4 — 0 4
De e p l y a n a l y z i n g b u s s e q u e n c e a n d e x p a n s i o n o f 5 1 MUC b y c o mma n d M OVX
So f t wa r e Te ch n o l o g y
由 MO V X指令 深入分析 5 1 单片机总线 时序及扩展
周 姝 颖 ,林 凡 强 ,何 凌 霄 ,富 饶 ( 成都 理 工 大 学 信 息 科 学 与 技 术 学 院 , 四川 成 都 6 1 0 0 5 9 )
摘 要 :分 析 了 MC S 5 1单 片 机 访 问 外 部 存 储 器 指 令 MO V X 的 执 行 过 程 ,介 绍 了 5 1系 列 单 片 机 使
ቤተ መጻሕፍቲ ባይዱ
Ke y wor d s:MC U;b u s ;s e q u e n c e i n t i me ;s p a c e o f me mo  ̄ ;d e c o d i n g
A T 8 9 C 5 l单 片 机 是 A T ME L 公 司 设 计 生 产 的 与 MC S 5 1内 核 兼 容 的 5 1系 列 单 片 机 之 一 ,该 系 列 单 片 机 以 其 优 越 的 性 能 和 成 熟 的 技 术 在 控 制 和 自动 化 应 用 领 域 占有着 较 大的 市场 ; 除此 以外 , 5 1单 片 机 有 着 计 算 机 系统 中经 典 的总线结 构 , 即: 数据 总线 、 地 址 总 线 和 控 制 总线 。 在 实 际 应 用 中 ,单 片 机 的 4个 端 口 中 , P O 口通 常 是
常见51单片机指令及详解

常见51单片机指令及详解1. 简介单片机是一种集成电路,具备处理和控制功能。
51单片机是指Intel公司推出的一系列8位单片机,常用于嵌入式系统和物联网设备。
本文将介绍一些常见的51单片机指令,并对其进行详解。
2. 数据传送指令2.1 MOV指令MOV指令用于将数据从一个寄存器或内存位置传送到另一个寄存器或内存位置。
例如:MOV A, #10 ;将立即数10传送给累加器AMOV R0, R1 ;将寄存器R1的值传送给R02.2 XCH指令XCH指令用于交换两个寄存器或内存位置中的数据。
例如:XCH A, B ;交换累加器A和B的值3. 算术运算指令3.1 ADD指令ADD指令用于将两个操作数相加,并将结果保存在累加器中。
例如:ADD A, B ;将累加器A和寄存器B的值相加,结果存储在A中3.2 SUBB指令SUBB指令用于将第二个操作数的补码与累加器的值相减,并将结果存储在累加器中。
例如:SUBB A, B ;将B的补码与累加器A的值相减,结果存储在A中4. 逻辑运算指令4.1 ANL指令ANL指令用于对两个操作数进行按位与运算,并将结果存储在目的操作数中。
例如:ANL A, B ;将累加器A和寄存器B的值按位与,结果存储在A 中4.2 ORL指令ORL指令用于对两个操作数进行按位或运算,并将结果存储在目的操作数中。
例如:ORL A, B ;将累加器A和寄存器B的值按位或,结果存储在A 中5. 跳转指令5.1 JMP指令JMP指令用于无条件跳转至指定的目标地址。
例如:JMP 2000H ;跳转至内存地址2000H处执行指令5.2 JZ指令JZ指令用于在累加器为零时跳转至指定的目标地址。
例如:JZ 3000H ;当累加器为零时,跳转至内存地址3000H处执行指令6. 输入输出指令6.1 IN指令IN指令用于将外部设备的数据输入到累加器或指定的寄存器中。
例如:IN A, P1 ;将P1端口的数据输入到累加器A中6.2 OUT指令OUT指令用于将累加器或指定的寄存器中的数据输出到外部设备。
MCS--51单片机指令
MCS--51单片机指令一、数据传送类指令1、内部数据存储器间数据传送指令MOV A,#dataMOV A,directMOV A,RnMOV A,@RiMOV Rn,#dataMOV Rn,directMOV Rn,AMOV direct,#dataMOV direct,AMOV direct,RnMOV direct,@RiMOV direct,directMOV @Ri,#dataMOV @Ri,AMOV @Ri,direct2、以DPTR为目的的MOV DPRT,#data 163、访问片外RAMMOVX A,@DPTRMOVX A,@RiMOVX @DPTR,AMOVX @Ri,A4、访问片外ROMMOVC A,@A+DPTR ;(A) ←((A)+(DPTR))MOVC A,@A+PC ;(PC) ←(PC)+1,(A) ←((A)+(PC))5、数据交换指令XCH A,direct ;(A) ↔(direct)XCH A,@Ri ;(A) ↔((Ri))XCH A,Rn ;(A) ↔(Rn)XCHD A,@Ri ;(A3~0)↔ ((Rn)3~0)SWAP A ;(A7~4)↔ (A3~0)6、堆栈操作类指令PUSH direct ;(SP)←(SP)+1,(SP)←(direct)POP direct ;(direct)←(SP),(SP)←(SP)-1二、算术运算类指令1、加法指令ADD A,#dataADD A,directADD A,@RiADD A,Rn2、带进位加法指令ADDC A,#data ;(A)←(A)+(CY)+#dataADDC A,directADDC A,@RiADDC A,Rn3、带借位减法SUBB A,#data ;(A)←(A)-(CY)-#dataSUBB A,directSUBB A,@RiSUBB A,Rn4、加1、减1指令INC AINC directINC @RiINC RnINC DPRTDEC ADEC directDEC @RiDEC Rn5、乘、除法指令乘法指令MUL AB ;(B)←((A)×(B))15~8,(A)←((A)×(B))7~0(CY)←0除法指令DIV AB ;(A)←(A)÷(B)之商,(B)←(A)÷(B)之余数(CY)←0,(OV)←06、十进制调整指令DA A ;若(A)3~0>9或(AC)=1,则(A)3~0←(A)3~0+06H;若(A)7~4>9或(CY)=1,则(A)7~4←(A)7~4+06H三、逻辑运算及移位类指令1、逻辑“与”运算指令ANL direct,AANL direct,#dataANL A,#dataANL A,directANL A,@RiANL A,Rn2、逻辑“或”运算指令ONL direct,AONL direct,#dataONL A,#dataONL A,directONL A,@RiONL A,Rn3、逻辑“异或”运算指令XNL direct,AXNL direct,#dataXNL A,#dataXNL A,directXNL A,@RiXNL A,Rn4、累加器A清零与取反指令CLR A ;(A)←00HCPL A ;(A)←(Ᾱ)5、移位指令RL A ;(A n+1)←(A n),(A0)←(A7)RLC A ;(A n+1)←(A n),(CY)←(A7),(A0)←(CY)RR A ;(A n)←(A n+1),(A7)←(A0)RRC A ;(A n)←(A n+1),(CY)←(A0),(A7)←(CY)四、控制转移类指令1、无条件转移指令LJMP addr16AJMP addr11SJMP relJMP @A+DPTR2、条件转移指令1)累加器判零转移指令JZ rel ;若(A)=0,则跳转JNZ rel ;若(A)≠0,则跳转2)比较转移指令CJNE A,#data,relCJNE A,direct,relCJNE @Ri,#data,relCJNE Rn,#data,rel若目的操作数=源操作数,则执行下一条指令若目的操作数>源操作数,则跳转,CY=0若目的操作数<源操作数,则跳转,CY=13)减1条件转移指令DJNZ direct,rel ;(direct)←(direct)-1若(direct)=0,则执行下一条指令否则,跳转DJNZ Rn,rel ;(Rn)←(Rn)-1若(Rn)=0,则执行下一条指令否则,跳转3、子程序调用及返回指令LCALL addr16ACALL addr11RETRETI4、空操作指令NOP五、位操作类指令1、位传送指令MOV C,bitMOV bit,C2、位置位指令CLR bit ;(bit)←0CLR C ;(CY)←0SETB bit ;(bit)←1SETB C ;(CY)←13、位逻辑指令ANL C,bitANL C,/bitORL C,bitORL C,/bitCPL bitCPL C4、位条件转移指令1)、以CY内容为条件的双字节双周期转换指令JC rel;若(CY)=1,则转移否则,顺序执行JNC rel;若(CY)=0,则转移否则,顺序执行2)、以位地址内容为条件的三字节双周期转移指令JB bit,rel;若(bit)=1,则转移否则,顺序执行JNB bit,rel;若(bit)=0,则转移否则,顺序执行JBC bit,rel;若(bit)=1,则转移,(bit)←0否则,顺序执行。
MCS-51单片机的指令
MCS-51单⽚机的指令MCS-51单⽚机的指令⼀.数据传送类指令(29条).1 通⽤传送指令(16条)格式:MOV ⽬的操作数,源操作数功能:把第⼆操作数指定的字节内容传送到第⼀操作数指定的单元中。
不影响源操作数内容,不影响别的寄存器和标志。
根据⽬的操作数的不同,通⽤传送指令⼜分为以下⼏种类型:1.1 以累加器A为⽬的操作数的传送类指令(4条)指令助记符及功能说明如下:⽬的操作数源操作数功能说明源操作数寻址⽅式MO V A, direct ;(A)←(direct)直接寻址MO V A, @Ri ;(A)←((Ri))寄存器间接寻址MO V A, Rn ;(A)←(Rn)寄存器寻址MO A, #data ;(A)←data ⽴即寻址V这类指令的功能是将源操作数送到⽬的操作数A中。
指令执⾏后的结果:除了奇偶标志P始终跟踪A中数据的奇偶性外,不影响PSW中的其他标志位。
1.2 以Rn为⽬的操作数的传送类指令(3条)指令助记符及功能说明如下:⽬的操作数源操作数功能说明源操作数寻址⽅式MOVRn, A ;(Rn)←(A) 寄存器寻址MO V Rn, direct ;(Rn)←(direct)其中,Rn是R0,…,R7中的任意⼀个。
例1 若(A)=20H,则执⾏指令MOV R3, A后,(R3)=20H。
注意:Rn寄存器之间不能直接传送数据。
如指令“MOV R1, R7”是错误的。
该类指令执⾏后,不影响PSW中的标志位。
1.3. 以直接地址directX为⽬的操作数的传送类指令(5条)指令助记符及功能说明如下:⽬的操作数源操作数功能说明源操作数寻址⽅式M OV directX, A ;(directX)←(A)寄存器寻址M directX, Rn ;(directX)←寄存器寻址OV (Rn)M OV directX, directY ;(directX)←(directY)直接寻址M OV directX, @Ri ;(directX)←((Ri))寄存器间接寻址M OV directX, #data ;(directX)←data⽴即寻址这类指令的功能是把源操作数的内容送到直接地址directX中去。
51系列单片机指令系统
MOV DPTR,#1000H MOVX A,@DPTR INC DPTR, MOVX @DPTR,A 7、程序存储器向累加器A传送指令 MOVC A,@A+DPTR MOV DPTR,#100H MOV A,R0 MOVC A,@A+DPTR ORG 0100H. DB 0,1,4,9,16,25 8、堆栈操作指令 PUSH direct POP direct 第一条指令称之为入栈指令,就是将direct中的内容 送入堆栈中,第二条指令称之为弹出指令,就是将堆栈 中的内容送回到direct中。
位寻址时,操作数是二进制数的某一位,其位地 址出现在指令中,例如指令 • SETB bit ;(bit) ← l • 51系列单片机可用于位寻址的空间是内部RAM的可 位寻址区和SFR区中的字节地址可以被8整除(即地址以 “0”或“8”结尾)的寄存器所占空间,寻址方式如表 2-2所示。
表2-2 寻址方式一览表
寻 址 方 式
寻 址 范 围
R0-R7 ,DPTR ACC,B,C(CY位)
内部RAM 00H-7FH 特殊功能寄存器 80H-FFH 内部RAM位寻址区 (20H-2FH): 位地址00H-7FH 可寻址的特殊功能寄存器: 位地址 80H-F7H 以数据指针表示操作数 内部RAM 00H-7FH 外部RAM或I/O端口 00H-FFH / 0000H-FFFFH
图2-3 寄存器间接寻址
图2-4 立即寻址
4、立即寻址
•
立即寻址时,指令中直接给出操作数。例如指令 MOV A,#76H ;数据76H送累加器 A。 • 立即数寻址过程如图2-4所示。
5、变址寻址
•
变址寻址时,指定的变址寄存器的内容与指令中 给出的偏移量相加,所得的结果作为操作数的地址。 例如指令MOVC A, @A+DPTR ;((A)+(DPTR))送 A。变址寻址过程如图2-5所示。 不论用DPTR或PC作为基址指针,变址寻址方式都 只适用于51系列单片机的程序存储器,通常用于读取 数据表也就是将程序存储器中的数送入A中。因此也称 为查表指令,常用此指令来查一个已做好在程序存储 器中的表格,这条指令采用变址寻址。
mcs51单片机位操作指令及编程举例

mcs51单片机位操作指令及编程举例MCS-51 单片机的硬件结构中,有一个位处理器(又称布尔处理器),它有一套位变量处理的指令集。
在进行位处理时,CY(就是我们前面讲的进位位)称位累加器。
有自已的位RAM,也就是我们刚讲的内部RAM 的20H-2FH 这16 个字节单元即128 个位单元,还有自已的位I/O 空间(即P0.0..P0.7,P1.0.P1.7,P2.0..P2.7,P3.0..P3.7)。
当然在物理实体上它们与原来的以字节寻址用的RAM,及端口是完全相同的,或者说这些RAM 及端口都能有两种使用办法。
(1)位传送指令MOV C,BITMOV BIT,C 这组指令的功能是实现位累加器(CY)和其它位地址之间的数据传递。
例:MOV P1.0,CY ;将CY中的状态送到P1.0 管脚上去(如果是做算术运算,我们就能通过观察知道现在CY 是多少啦)。
MOV P1.0,CY ;将P1.0 的状态送给CY。
(2)位修正指令位清0 指令CLR C ;使CY=0CLR bit ;使指令的位地址等于0。
例:CLR P1.0 ;即使P1.0 变为0 位置1 指令SETB C ;使CY=1SETB bit ;使指定的位地址等于1。
例:SETB P1.0 ;使P.0 变为1 位取反指令CPL C ;使CY 等于原来的相反的值,由1 变为0,由0 变为1。
CPL bit ;使指定的位的值等于原来相反的值,由0 变为1,由1 变为0。
例:CPL P1.0 以我们做过的实验为例,如果原来灯是亮的,则执行本指令后灯灭,反之原来灯是灭的,执行本指令后灯亮。
(3)位逻辑运算指令位与指令ANL C,bit ;CY 与指定的位地址的值相与,结果送回CYANL C,/bit ;先将指定的位地址中的值取出后取反,再和CY 相与,结果送回CY,但注意,指定的位地址中的值本身并不发生变化。
例:ANL C,/P1.0 设执行本指令前,CY=1,P1.0 等于1(灯灭),则执行完本指令后CY=0,而P1.0 也是等于1。
51单片机执行指令的过程
51单片机执行指令的过程单片机是一种集成度高的微控制器。
它由中央处理器单元(CPU)、存储器和外设接口电路等功能模块组成,能够实现数据的输入与输出、控制系统中各种设备的工作。
其执行指令的过程可以简单地分为指令存储、指令译码和指令执行三个阶段。
首先,在指令存储阶段,将程序存储到单片机的存储器中。
单片机通过地址线从存储器中读取指令,并通过数据线将指令传送到指令译码器中。
存储器中的指令由二进制代码表示,每条指令的位数和格式由单片机的体系结构决定。
接下来,在指令译码阶段,译码器根据指令的操作码(OpCode)来判断指令的类型,并将指令传送给相应的功能块进行执行。
根据不同的指令类型,所需的操作包括运算、逻辑判断、数值传输等等。
译码器还负责解析指令的操作数及寻址方式。
最后,在指令执行阶段,指令被单片机的CPU执行。
根据译码器解析出来的指令类型和操作数,CPU通过执行相应的操作完成指令的功能。
执行过程中,各个功能模块之间的数据传递通过数据总线进行。
CPU还会根据指令的结果和条件码更新标志寄存器,以便用于后续指令的判断和跳转。
在指令的执行过程中,单片机的工作频率决定了指令的执行速度。
频率越高,单片机能够处理的指令越多,执行的速度越快。
同时,单片机还可以根据需要选择不同的时钟选项,以满足不同应用场景对执行速度和功耗的要求。
除了基本的指令执行过程,单片机还提供了各种中断机制,用于及时响应外部事件。
当发生中断事件时,CPU会根据优先级去中断向量表中查找相应的中断服务程序,并执行相关操作,以处理中断请求。
中断机制的存在大大提高了单片机的实时性和可用性。
总结起来,单片机执行指令的过程包括指令存储、指令译码和指令执行三个阶段。
指令存储阶段将程序存储到存储器中,指令译码阶段根据指令的操作码进行译码,指令执行阶段根据译码结果执行相应的操作。
通过这一过程,单片机能够实现各种应用场景下的控制和数据处理。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
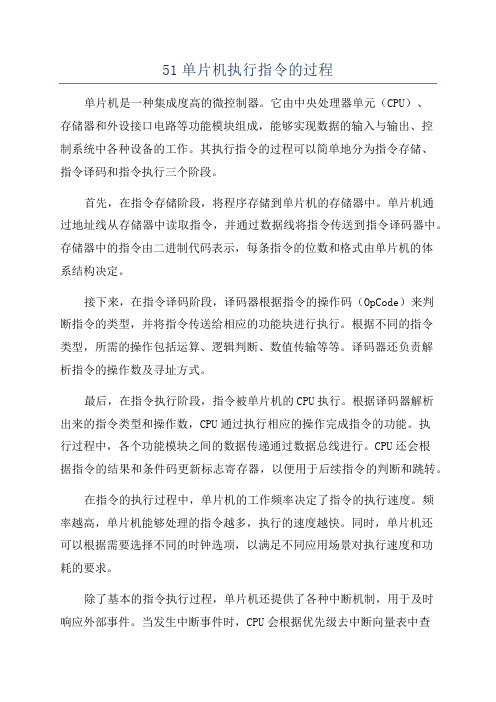
外部数据存储器读周期
访问外部存储器指令MOVX
执行访问外部存储器指令MOVX时,首先从程序存储器中取出指令,然后从外部数据存储器中取出数据,因此该指令执行时序图与前三类指令不同。
由于MOVX是单字节双周期指令,所以在取指令阶段(即第一个机器周期的S1P1到S4P2)是读1丢1,而在执行指令读数据阶段(即第一个机器周期的S5到第二个机器周期的S3)所完成的操作如下:
(1)先将外部数据存储单元的地址ADDR由DPTR从P0与P2口输出,即时序图中的S5P1到S6P2阶段。
并在S4P2到S5P2阶段,发ALE信号将地址锁存。
(2)在第二个机器周期S1P2到S2P2内取消ALE与程序选通信号PSEN (即取消取指操作),使P0口专门用于传送数据。
同时发读信号,通过P0口将外部数据存储单元中的数据传送到累加器A中。
即:时序图的S6P2到S4P1阶段。
(3)由于锁存的地址为外部数据存储单元的地址,所以在第二个机器周期S4取消取指令的操作,即:不再发程序选通信号PSEN 。