红外光学镜头设计方案
大相对孔径制冷型红外相机镜头的光学设计

大相对孔径制冷型红外相机镜头的光学设计张华卫;张金旺;刘秀军;刘波【摘要】A low F number lens for infrared camera is introduced. Re-imaging method is used to ensure 100% cold shield efficiency in this lens for cooled IR camera. The lens is designed with F number 1.5 and full field angle 18.6° in 8-10mm waveband. Its imaging quality is nearly up to diffraction limitation and can be guaranteed with general manufacture and assembly technics.%介绍了一种大相对孔径红外成像镜头的设计。
该镜头针对制冷型红外探测器,采用二次成像设计,保证100%冷光阑效率。
在8~10mm波段,实现相对孔径(F数)为1.5、视场角2w为18.6°的设计,其成像质量优良,传函接近衍射极限,在常规加工装调公差下易于保证应用质量。
【期刊名称】《红外技术》【年(卷),期】2015(000)002【总页数】6页(P124-129)【关键词】大相对孔径;光学镜头;制冷型红外相机;二次成像【作者】张华卫;张金旺;刘秀军;刘波【作者单位】四川长虹电子科技有限公司,四川绵阳 621000;四川长虹电子科技有限公司,四川绵阳 621000;四川长虹电子科技有限公司,四川绵阳 621000;四川长虹电子科技有限公司,四川绵阳 621000【正文语种】中文【中图分类】TN21;V445.8红外成像探测相比无线电探测的最大优点是不主动发射电磁波,因此具有极强抗干扰能力和隐蔽性,在军事领域得到广泛应用。
多点触控 多点触摸 光学式 红外光 设计方案
关于多点触控1 前言多点触控(又称多重触控、多点感应、多重感应)是采用人机交互技术与硬件设备共同实现的技术,能在没有传统输入设备(如:鼠标、键盘等。
)下进行计算机的人机交互操作。
在人机交互的发展过程中,鼠标和键盘一直是最基本的输入设备,而屏幕一直是计算机信息的最主要输出设备。
现在,一种全新的交互方式正在向我们走来——自然用户界面,也就是俗称的触摸界面,在这种操作模式下,屏幕不仅作为输出设备,同时被作为输入设备,在屏幕上直接操作,从而操控计算机。
多点触控是一样全新的人机互动方式,通过我们的十根手指代替鼠标键盘等输入设备,采用全新的用户体验方式,手势识别,新奇的体验感觉,高清直观的显示方式,为用户提供简便直观的人机互动方式和高效震撼的操作体验。
随着iPhone等触控手机和平板电脑的日益火爆,人机互动领域成为新时尚热点,多点触控必将引领一次新的人机交互变革。
实体键盘鼠标等输入外设早晚有一天会被取代,现代的人们追求的是高效便捷的信息服务,不可能走到哪里都要带着鼠标键盘,便捷高效的多点触控技术正是我们所需要的下一代人机交互方式。
简单的来说就是解放我们的十个指头,能让我们离开办公室的椅子,在任何地方,通过任何媒介进行人和机器装置高质量高效的沟通。
2 国内外现状目前,手机等数码产品大多数采用电容屏或电阻屏,不管是电容屏还是电阻屏都共同存在一个缺点,就是尺寸的限制,一般不能超过20寸,这也是制约多点触控技术发展的一个重要原因。
在大尺寸多点触控技术方面,国外有一个组织,名字叫自然用户界面小组(Natural User Interttace Group),创建于2007年,他们以互动媒体探索以及开源机器遥感技术为中心,开发受益于艺术、商业、教育等相关应用。
希望能够为在搭建低成本、高分辨率、开源式的多点触摸设备感兴趣的人提供一个多点触摸技术的信息资源中心。
随着全国多点触控爱好者加入到这个项目的研究中,这个平台不断发展壮大,多点触摸技术带来了许多惊人的开创,国内外几乎所有多点触控公司的技术都是来源于这个开源平台。
红外双焦无热化空间相机光学镜头设计
第 2 5卷 第 1 O期 2 0 1 3年 1 0月
强 激 光 与 粒 子 束
HI GH POW ER LASER AND PARTI CLE BEAM S
Vo 1 . 2 5 ,NO . 1 0
oc t .,2 0 13
文章编 号 : I O O I 一 4 3 2 2 ( 2 0 1 3 ) 1 0 — 2 5 1 1 一 O 6
1 变 焦 系 统 理 论
双 焦光 学 系统 的设计 原理 是 利用 系统 中两 组 透镜组 移 动来 改 变 系统 组合 焦 距 , 同 时满 足 变 焦时 长 短 焦距 像 面位 置保 持不 变 , 且保 证长 焦距 和短 焦距 都具 有 良好 的成像 质量 。在双焦 光学 系统 的像 差平 衡方 面 , 需 要 同 时 能够 校正 变焦 光学 系统 两个 焦距 位 置 的像差 , 通 过匹 配两个 位置 的初 级像 差 与高级 像差 、 轴上 点像 差和 轴外 点 像差 , 前 固定 组 、 变 焦组 和 补偿 组 限制 了倾斜 宽光 束 的下光 线 , 后 固定 组 限制 了上光 线 , 因此在 优化 过程 中要
人 。 设 计 了一种 用 于 3 2 4 ×2 5 6中波 制 冷红外 探 测器 的双 焦 1 O倍 光学 系统 , 系统 焦距 2 4  ̄2 4 0 mm, 相对 孔径
红外光学镜头设计方案
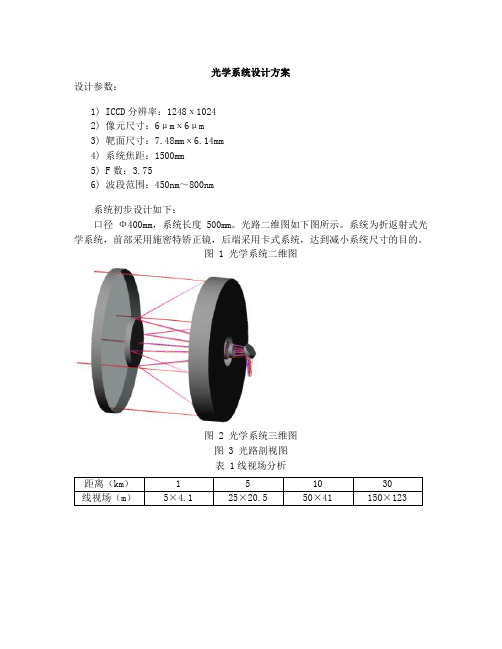
光学系统设计方案设计参数:1) ICCD分辨率:1248х10242) 像元尺寸:6μmх6μm3) 靶面尺寸:7.48mmх6.14mm4) 系统焦距:1500mm5) F数:3.756) 波段范围:450nm~800nm系统初步设计如下:口径Ф400mm,系统长度500mm。
光路二维图如下图所示。
系统为折返射式光学系统,前部采用施密特矫正镜,后端采用卡式系统,达到减小系统尺寸的目的。
图 1 光学系统二维图图 2 光学系统三维图图 3 光路剖视图表 1线视场分析距离(km) 1 5 10 30线视场(m)5×4.125×20.550×41150×123图 4系统球差及场曲曲线系统传递函数曲线如下图所示,根据探测器像元尺寸,MTF截频计算至83lp/mm处,从下图可以看出,系统MTF在100lp/mm处,水平最大视场及垂直最大视场均高于0.5,对角线视场MTF高于0.5。
图 5 系统MTF曲线系统弥散圆的大小如下图所示,弥散圆表示点源物体经过系统后的发散情况,其半径越小、能量越集中,说明成像质量越好。
通常接近衍射极限的系统弥散圆直径小于接收器的单个像素值。
本系统采用的探测器像元尺寸为6μm,系统的弥散圆直径最大值为3.8μm,说明系统的成像质量接近衍射极限。
图 6畸变网格及畸变曲线系统的畸变网格和畸变曲线如下图所示,畸变的大小能直接反映出系统图像的变形情况,从下图中可以看出,系统的最大畸变小于0.01%,图像变形肉眼无法分辨。
图 7畸变网格及畸变曲线系统成像的二维仿真效果如下图所示,左图为目标图像,右图为经系统后所成图像,从图中可以看出,系统成清晰倒像。
图 8二维成像仿真公差分析镜头最终的成像质量受到材料、加工、装配等各方面的影响,为保证系统最终获得良好的成像质量,设计时应充分考虑系统各部分的公差分配,使材料、加工及装配的误差均在可接受的范围内,避免某类误差过大使最终的成像质量下降过多。
一种红外成像镜头结构设计及分析

科学技术创新2020.15红外成像是通过透镜组汇聚被探测的光信号到探测器上,再由探测器及其后道进行光信号到电信号的转换[1]。
红外镜头的设计,需要根据探测器的像元和尺寸、具体运用的场合,还有性价比等因素来综合考虑进行设计[2]。
一个好的镜头设计,需要综合考虑光机配合的效果,缺一不可[3]。
随着国内红外光学技术蓬勃发展,其对与之匹配的镜头机械结构的设计、装调要求越来越高,可以说,机械设计非常重要[4],但红外光学精密镜头结构设计有它独有的特点和规律,因此在设计时需综合考虑其设计原则、公差匹配等,以满足高品质成像要求[5]。
本文通过分析红外成像镜头结构设计特点,对其基本组件如镜片安装座、压圈、螺纹要素等关键参数分别进行设计分析。
同时总结各结构尺寸参数设计原则,为红外成像镜头结构工程师提供切实可行的设计参考依据。
1红外光学镜片的安装座设计红外光学镜片安装座结构设计见图1。
图1镜片安装方案设计设计时一般遵循如下基本原则:(1)红外镜片安装孔孔径D 比镜片外径d大0.4mm,以便在0.4mm间隙中间涂覆硅胶保护镜片安全。
(2)红外镜片安装孔孔径D尺寸公差按H8给出。
公差H8表明孔的重要性,装配时利于调节光轴。
(3)镜片安装孔轴向尺寸T1≥2/3镜片外径宽T2。
(4)镜片第一面顶点与镜筒端面A一般要有2~3mm距离,保护镜片安全,这点对第一透镜就显得特别重要。
(5)固定镜片的结构件内径必须小于光学设计透光孔径,即不能挡光。
(6)透光孔径公差按H10给出。
(7)镜片安装孔同轴度和端面跳动公差按尺寸段按7级查表给出。
(8)固定镜片的结构件内径必须小于光学设计透光孔径,即不能挡光。
(9)镜片安装孔同轴度和端面跳动公差按尺寸段按7级查表给出。
(10)轴向光学镜片结构件间隔尺寸H公差一般取光学间隔公差的1/3~1/2,公差值大的取1/3,公差值小的取1/2,总之,既要保证光学间隔公差,又要使设计的构件(包括工装)能经济地做出来。
红外成像系统中的透镜设计与Zemax模拟方法的应用

红外成像系统中的透镜设计与Zemax模拟方法的应用简介红外成像系统在许多领域中都有广泛的应用,如安防监控、无人机导航和医学诊断等。
在红外成像系统中,透镜是其中关键的组成部分之一。
透镜的设计和模拟是确保系统性能优化的重要步骤。
本文将探讨红外成像系统中透镜的设计原理以及使用Zemax软件进行模拟的方法。
红外透镜的设计原理红外透镜的设计与可见光透镜类似,但受到其工作波长范围和材料特性的限制。
在设计过程中,需要考虑以下因素:1. 波长范围:红外透镜通常需要在波长范围内具有良好的透过率和成像能力。
不同的应用领域可能有不同的波长要求。
2. 焦距和视场角:透镜的焦距和视场角直接影响成像系统的成像质量和视野范围。
设计师需要根据具体应用的需求进行权衡和优化。
3. 材料选择:红外透镜通常采用透明度较高的特殊材料,如硒化锌、镉镓砷等。
材料的选择需考虑其在红外波段的透过率和成本等因素。
4. 光学畸变:透镜的设计还要考虑到光学畸变的修正,以保证成像系统的精度。
Zemax软件的应用Zemax是一种常用的光学设计和仿真软件,被广泛应用于透镜设计和成像系统模拟。
通过Zemax软件,可以进行以下模拟和分析:1. 光学系统布局:通过Zemax的图形界面,可以方便地创建和调整光学系统的布局,包括透镜的位置、距离和角度等参数。
2. 透镜表面设计:Zemax提供了丰富的透镜表面设计功能,如球面、非球面和自由曲面等。
可以根据设计要求,进行透镜表面的优化和调整。
3. 成像仿真:通过设置合适的光源和探测器,可以在Zemax中进行红外成像系统的仿真。
可以评估成像质量,比如分辨力、畸变和成像亮度等参数。
4. 光学系统分析:Zemax还提供了对光学系统进行优化和分析的功能。
通过调整透镜参数,可以优化成像系统的性能并满足设计要求。
结论红外成像系统中透镜的设计和模拟是确保系统性能优化的关键步骤。
透过Zemax软件的应用,设计师可以方便地进行透镜设计、光学系统布局和成像仿真等工作。
大相对孔径制冷型红外相机镜头的光学设计
光 学 系统来 说 ,在焦 距 一定 的条件 下 口径越 大 ( 即 F 数越 小 )则接 收 的能量 越 多 ,对 于弱 小 目标 的探
c a n b e g u a r a n t e e d wi t h g e n e r a l ma nu f a c t u r e a n d a s s e mb l y t e c h n i c s .
Ke y wo r d s :l o w F — n m b u e r ,l e n s ,c o o l e d I R c a me r a ,r e — i ma g i n g
( 四川 长 虹 电子 科 技 有 限公 司 , 四川 绵 阳 6 2 1 0 0 0 )
摘要:介绍 了一种大相对孔径红外成像镜头的设计。该镜头针对制冷型红外探测器 ,采用二次成像 设计,保证 1 0 0 %冷光阑效率。在 8 ~1 0 “ m波段,实现相对孔径 ( F数 ) 为1 . 5 、视场角 2 c o 5  ̄1 8 . 6 。
的核心 部件 是红外 探 测器 ,根据 其光 敏面 的工 作温 度 ,分 为制 冷型 和非 制冷 型两 种 。通 常 制冷 型红 外
探 测器 工作 在 7 7 K 的低温环 境 中…,相 比于 非制冷 型 红外探 测 器 ,制 冷 型探测 器 的信 噪 比要 比非 制冷 型 探测 器高 出 1 ~2个数量 级[ 2 1 , 能够分 辨更 细微 的 温 度差 别 ,探测 距 离较远 ,主 要应 用于 高端 军事 用
的设计 ,其成像质量优 良,传 函接近衍射极 限,在常规加工装调公差下易于保证应用质量。 关键词:大相对孔径;光学镜 头;制冷型红外相机;二次成像 中图分 类号 :T N 2 1 ,V4 4 5 . 8 文 献标 识码 :A 文 章编 号 :1 0 0 1 . 8 8 9 1 ( 2 0 1 5 ) 0 2 . 0 1 2 4 . 0 6
长波红外辅助驾驶系统镜头设计
长波红外辅助驾驶系统镜头设计针对规格为384×288型像元尺寸为25?滋m的非制冷微测辐射热计,设计了一款工作波段为8~12?滋m、焦距f’=15mm、F#=1、工作温度为-37℃~49℃的辅助驾驶红外镜头。
通过合理的选择镜片材料,利用ZEMAX对系统进行优化设计。
设计结果表明,该系统结构简单,在空间频率20lp/mm处调制传递函数MTF大于0.5,弥散斑半径较小,具有良好的成像质量。
标签:光学设计;辅助驾驶系统;长波红外引言红外辅助驾驶系统是一种应用于黑夜、大雾天气、大雪天气等恶劣气候条件下的热成像仪,可以在很大程度上保障驾乘人员的人身安全。
随着红外技术的日渐成熟,很多红外产品得到广泛的应用,得到了用户的好评与青睐。
从最初的军工领域逐渐向民用领域延伸,由于红外辅助驾驶系统和我们的日常生活有着密切的联系,所以它作为一种典型的应用得到很多的关注。
通过使用红外辅助驾驶系统,驾驶员可以轻松地掌握道路周边的实时动态,提前预知可能出现的危险情况并及时的做出调整避免发生交通事故,提高驾驶的安全性。
据研究发现将系统的相对孔径设置在F#=1左右,可以在很大程度上提高对温差的灵敏度[1]。
像差是影响光学系统成像质量的主要因素且并不能完全消除,所以为了得到更为良好的成像质量我们只能采取一些手段来尽可能的减少像差对于系统的影响,经研究发现衍射元件可以很好的校正色差及像差。
通过改变面型相互比较发现,单一使用球面镜面的系统,结构复杂、质量较重、像质差,加入非球面和衍射面能较好地校正像差,改善成像质量[2]。
因此文章混合使用非球面与衍射面设计了一款长波红外辅助驾驶系统。
1 结构选取在对系统进行设计时需要着重考虑以下几点:(1)系统结构选取。
相对孔径又称为光圈,是光学系统(或镜头)入瞳直径与焦距的比值,其倒数称为F数。
对于一个光学系统来说,能够接受到较为多的能量是拥有良好像质的关键,同时因为辅助驾驶系统的特殊性我们也需要系统对微弱目标的探测能力更为敏感,这就要求系统选择较大口径[3]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
光学系统设计方案
设计参数:
1)ICCD分辨率:1248х1024
2)像元尺寸:6μmх6μm
3)靶面尺寸:7.48mmх6.14mm
4)系统焦距:1500mm
5)F数:3.75
6)波段范围:450nm~800nm
系统初步设计如下:
口径Ф400mm,系统长度500mm。
光路二维图如下图所示。
系
统为折返射式光学系统,前部采用施密特矫正镜,后端采用卡式系统,
21:13:08
达到减小系统尺寸的目的。
图 1 光学系统二维图
图 2光学系统三维图
21:17:16
86.21 MM New lens from CVMACRO:cvnewlens.seq Scale:0.29 22-Nov-14
图 3 光路剖视图
表 1线视场分析
距离(km) 1 5 10 30
线视场(m)5×4.1 25×20.5 50×41 150×123
图 4系统球差及场曲曲线
系统传递函数曲线如下图所示,根据探测器像元尺寸,MTF截频计算至83lp/mm处,从下图可以看出,系统MTF在100lp/mm处,水平最大视场及垂直最大视场均高于0.5,对角线视场MTF高于0.5。
21:14:01
图 5 系统MTF曲线
系统弥散圆的大小如下图所示,弥散圆表示点源物体经过系统后的发散情况,其半径越小、能量越集中,说明成像质量越好。
通常接近衍射极限的系统弥散圆直径小于接收器的单个像素值。
本系统采用的探测器像元尺寸为6μm,系统的弥散圆直径最大值为3.8μm,说明系统的成像质量接近衍射极限。
21:21:35
图 6畸变网格及畸变曲线
系统的畸变网格和畸变曲线如下图所示,畸变的大小能直接反映出系统图像的变形情况,从下图中可以看出,系统的最大畸变小于0.01%,图像变形肉眼无法分辨。
图 7畸变网格及畸变曲线
系统成像的二维仿真效果如下图所示,左图为目标图像,右图为经系统后所成图像,从图中可以看出,系统成清晰倒像。
图 8二维成像仿真
公差分析
镜头最终的成像质量受到材料、加工、装配等各方面的影响,为保证系统最终获得良好的成像质量,设计时应充分考虑系统各部分的公差分配,使材料、加工及装配的误差均在可接受的范围内,避免某
类误差过大使最终的成像质量下降过多。
下图给出了系统在100lp/mm处MTF的概率分布曲线,系统对各部分的公差要求如下表
所示,从图中可以看出,在考虑各部分的公差后,系统MTF90%概率处于0.37以上,能够保证最终系统有良好的成像质量。
目前的装配
21:28:54
及加工水平均可以保证表中要求的公差。
图 9 MTF概率分布曲线
探测能力分析
决定探测距离的因素通常有以下几个方面。
1、镜头焦距
决定探测距离的一个重要因素就是镜头焦距。
镜头焦距直接决定了目标所成的像的大小,也就是在焦平面上占几个像素,焦距越大,目标像所占用的像素点越多,根据约翰逊准则可知,其探测距离更远。
2、探测器性能
镜头焦距是从理论上决定了相机的探测距离,在实际应用中起着重要作用的另一因素是探测器性能。
镜头焦距只是决定了所成像的大小,占用像素点的数量,探测器性能则决定图像质量,如模糊程度,信噪比等。
探测器性能可从像元尺寸、灵敏度、信号处理等方面来分析。
像元尺寸越小,则空间分辨率越小,其探测距离越大。
探测器的灵敏度和信号处理决定了图像的清晰度。
如果探测器的灵敏度和信号处理能力不好的话,则所成的像只是一个模糊的像,也就无法识
别。
因此,一些探测器的灵敏度不高的话,则采取加大镜头口径的方法来提高图像效果,这增加了成本。
3、大气环境
虽然热辐射对大气的穿透能力比可见光强,但大气吸收、散射等对热像仪成像还是有一定的影响,特别是大雾和大雨的天气环境,从而影响到探测距离。
综上所述,在能见度一定的情况下,光电系统的探测能力主要由两部分组成,一是目标在靶面上成像所占的像元数,二是目标被系统接收成像后的信噪比。
此部分内容需要和探测器的探测灵敏度,转换效率等因素一并进行分析考虑。