由区域生长算法实现四边形网格划分
区域算法的分割方法
区域算法的分割方法
区域算法的分割方法是一种将图像分成若干个区域的图像分割技术。
这些区域通常具有相似的特征,例如颜色、纹理、亮度等,并且在图像内部具有连续性。
常见的基于区域的分割方法包括以下几种:
1. 区域生长法(Region Growing):从某个起始点开始,不断地向周围生长,直到达到一定条件为止,例如颜色、纹理或灰度值等。
这种方法需要手动选择起始点,并且计算复杂度较高。
2. 分裂与合并法(Split and Merge):将整张图像看作一个区域,将其分割成若干个子区域,然后对相邻的区域进行比较,并将相似的区域合并成更大的区域。
这种方法可以自动选择区域,并且可以产生较平滑的分割结果。
3. 基于能量函数的方法:通过定义一个能量函数来分割图像。
能量函数是一种用于衡量分割质量的函数,通常包括区域的特征和区域之间的相似度。
通过最小化能量函数来得到最佳的分割结果。
4. 基于图论的方法:将图像表示为一个图,其中每个像素表示一个节点,节点之间的边表示像素之间的相似度。
然后使用图分割算法来将图分割成若干个子图,每个子图对应一个区域。
这种方法可以自动选择区域,并且通常具有较高的分割质量。
这些基于区域的分割方法可以根据具体的应用场景和需求进行选择和应用。
复杂区域四边形网格生成的一种改进方法

年来,非结构化网格的生成方法取得了快速发展。
行波法(d nn r t n u 也称作推进 a i fn thie ( v cg e q ) A o c 波前 最初是由Ll 法, o] l 提出, 并用于平面区 域三角 形网 动生 后来, ei[ 将这种 格自 成。 Prr 1 ae等 2 方法进
(找 N 足件 满 条 礁 P 集 N 使 4 出 中 ) 的合2 ,
A
得P < , < , D与生成波上除A A 2 P n 且P n L B 2 L B外 的任一线段都不相交,本文取 n 1 ; 2. =5 ()若 N 不是空集,则选取其中相对于 A 5 2 B 的张角L P A B最大的点P作为新生成点, 构造单元 AB AP;若 丛 是空集, A C中不包含点集 凡 但AB
一步完善。 Prr等发展的技术中, 在 ei ae 区域中的内 部节点与单元是在剖分过程中同步生成的,并且通 过引入背景网格来控制内部节点的生成, 这一改进 便于将网格与离散误差联系起来,有利于寻求最优
网 随后, e i 及Lhe3 格。 Prr onr同时成功地把这种 ae 1 】
技术推广到任意形状三维区域的四面体网格生成。 与其它各种网格生成方法相比,行波法对复杂几何 形状与边界的二维区域( 或三维区域) 中的三角形( 或
2 三角形网格生成方法
一般来说,对一个给定的区域进行四边形网格 划分可以分两步:首先,在整个区域内生成三角形 网格;然后,在三角形网格的基础上划分四边形网 格。利用波前法生成三角形网格的技术己 经相对成
熟,这里只简要介绍一下其生成步骤( 见图1 ) 0
、 、
‘.‘ .沪 . 口.口 产 口
3 区域描述 . 1 通常直接对复杂区域生成网格比 较困难,较为 方便的作法是根据材料介质分区、网格密度分布、 边界条件等进行区域分解, 把复杂区域分解成若干 个较为简单的子域。 每个子域分别生成网 最后, 格, 将各个子域的网格连接在一起,就构成了区域的网
基于带约束前沿推进的四边形网格生成方法

基于带约束前沿推进的四边形网格生成方法汪攀;张见明;韩磊;鞠传明;池宝涛【摘要】In view of the limitation of the current various Q-Morph algorithms that can generate isolated triangles in the process of generating quadrilateral mesh,a new advancing front method with constraint was proposed.The method is a kind of Q-Morph algorithm based on advancing front.First,the two side edges and one top edge are generated according to the current front.Then the triangles in the quadrangle are eliminated from the triangular domain.Finally a quadrilateral mesh is generated.Moreover,some constraining conditions are imposed on the advancing procedure to avoid generating isolated triangles,which can improve algorithm efficiency and meshquality.Numerical experiments are presented to demonstrate that the new method could generate high-quality quadrilateral meshes for complex surface automatically.%针对当前各种Q-Morph算法在生成四边形网格的过程中容易产生残余三角形这一缺陷,提出了一种带约束的前沿推进算法.该方法是一种基于前沿推进思想的Q-Morph算法,由当前前沿生成两条侧边和一条顶边,并删除其内部的三角形,从而将三角形网格合并生成一个四边形网格,并在前沿推进的过程中加入了约束条件,从而可以有效地避免残余三角形的产生,提高了算法的效率和最终生成网格的质量.数值实验表明,该算法能够全自动生成质量较好的四边形网格.【期刊名称】《湖南大学学报(自然科学版)》【年(卷),期】2017(044)008【总页数】6页(P29-34)【关键词】网格生成;四边形网格;Q-Morph;前沿推进【作者】汪攀;张见明;韩磊;鞠传明;池宝涛【作者单位】湖南大学汽车车身先进设计制造国家重点实验室,湖南长沙 410082;湖南大学汽车车身先进设计制造国家重点实验室,湖南长沙 410082;湖南大学汽车车身先进设计制造国家重点实验室,湖南长沙 410082;湖南大学汽车车身先进设计制造国家重点实验室,湖南长沙 410082;湖南大学汽车车身先进设计制造国家重点实验室,湖南长沙 410082【正文语种】中文【中图分类】TP391在求解各类工程和科学计算问题上,有限元法或边界元法[1-2]已成为最有效的数值分析方法之一,网格划分是数值分析前处理的重要部分,已成为当前有限元或边界研究的重要领域.四边形网格既可以直接用于壳分析,也可用于六面体网格的输入,而且四边形网格在计算精度、计算效率等方面均优于三角形网格,因此研究四边形网格生成算法很有必要.四边形网格生成算法分为间接法和直接法.其中直接法包括映射法、子域映射法[3-4]和铺砖法[5-6]等,这些算法往往比较复杂或自适应性较差.为了减少四边形网格生成的难度,通常采用间接法[7-8].Lee等提出的Q-Morph算法[9]是典型的间接法,间接法即先生成三角形网格,再将三角形网格转化为四边形网格,常见的转化技巧有2种:分解法,将1个三角形分解为3个四边形;合并法,将两个相邻的三角形合并生成1个四边形[10].合并法在合并操作时会考虑生成四边形网格的质量,因此其生成的初始网格要优于分解算法.合并算法最大的难题在于最后会留下很多残余三角形,阻碍了全四边形网格的生成,此时常见的解决办法是用分解算法,将残余三角形分解为3个四边形,再通过拉普拉斯优化进行局部光顺处理,但是处理过多的残余三角形,不仅耗时较多,算法效率较低,也会影响最终生成网格的质量.为了减少残余三角形的数量,Lo[11]尝试设置一些探索性规则来确定三角形网格的合并顺序;胡向红等[10]在三角形合并的过程中加入了约束条件,从而避免了残余三角形的产生,但是该算法生成的网格质量较差.基于前沿推进的思想,Owen等提出了改进的Q-Morph算法[12-13],该算法改进Lee等提出算法中存在较多不规则点的缺陷,目前这一算法得到广泛的使用,并已集成到大型的商用有限元软件中.该方法可以生成质量较好的四边形网格,但是在合并的过程中也容易产生残余三角形.针对上述算法的不足,本文提出了一种基于带约束前沿推进的四边形网格生成方法,该方法以Owen提出的Q-Morph算法为基础,以保证在前沿推进的过程中,生成的四边形质量较好,并且在合并操作的过程中加入了约束条件,以保证前沿推进的过程中不会产生残余三角形,该算法能够自动高效地生成质量较好的四边形网格. 本文提出的算法是一种间接的四边形网格生成方法.先利用推动波前法生成三角形网格,然后基于Q-Morph算法以及前沿推进的思想,将三角形的外边界作为初始前沿,从外向里推进,将三角形网格合并生成四边形网格,其主要步骤如下,流程图如图1所示.1)用推动波前法生成初始三角形网格;2)取三角形网格的外边界,将其加入前沿链表,作为初始前沿;3)从链表中选取一条前沿作为当前前沿,将其作为当前四边形的底边;4)在底边的两个端点处生成两条侧边,侧边可以是已经存在的边,也可以是通过对角交换获取的边;5)通过交换对角线操作获取顶边;6)将底边、侧边、顶边生成一个四边形,并删除里面包含的三角形;7)通过局部优化改善四边形网格的质量和周围三角形网格的质量;8)更新前沿.基于前沿推进的Q-Morph算法主要包括:生成侧边、生成顶边、删除四边形内的三角形和局部光顺等几个主要的步骤(如图2所示).2.1 侧边的生成下面介绍以AB为前沿边,生成侧边AD和BC,步骤如下:1)确定当前前沿和相邻前沿的角平分线,如图3(a)所示的虚线;2)计算与前沿结点相连的边与角平分的夹角,如图3(a)所示的α1,α2,并取其中的最小值α=min(α1,α2);3)根据α确定侧边的生成方式,如果α≤ε(本文中ε取π/6)则直接以α对应的边作为侧边,如图3(b)所示的BC.否则,采取交换对角线的方式获取侧边,如图3(d)所示的AD.从侧边的生成过程可以看出,该方式生成的网格质量相比传统的直接删除一条公共边生成的四边形网格质量要好.当α较小时,直接取该边做侧边,当α较大时,则必然存在分居角平分线两侧的边,此时通过交换对角线得到的新边,则必然与角平分线的夹角较小,即适合做侧边,因此,此方法总能找到一条合适的侧边.2.2 顶边的生成在以AB为前沿边,生成侧边AD和BC以后,连接CD,CD即为顶边,但是很可能CD并不是三角形中已经存在的边,此时需要通过交换对角线,恢复边CD.对于任意的三角网,理论可以证明,可以通过有限次对角线交换恢复给定的任意一条边,具体步骤如下:1)连接CD,得到所有与CD相交的三角形.如图4所示的T0,T1,T2,T3;2)由C点开始,依次交换T0,T1,T2,T3的对角线,交换对角线时,如果相邻两个三角形构成的四边形是凹四边形,则将对角线交换的过程延后至下一次循环中进行;3)当出现CD边时,循环终止,即得到了顶边CD,否则进入步骤2).直至恢复了顶边CD.2.3 删除内部三角形生成四边形ABCD以后,需删除四边形内部的三角形,本文删除内部三角形的方法也是基于前沿推进的思想提出来的,具体步骤如下(如图5所示):1)将四边形内部的三角形加入前沿链表中;2)以当前前沿为基础,搜索与其相邻的三角形,删除该三角形,并判断该三角形另外两条边,若该边为前沿边,则将其从前沿链表中删除,否则将其加入前沿链表;3)当前沿链表为空时,该过程结束,否则进入步骤2),直至前沿链表为空.2.4 约束条件Owen提出的Q-Morph算法[13]是以前沿推进的方式生成四边形,但是在前沿推进的过程中,无法保证待合并的三角形区域是一个单连通域,也就是说三角形区域可能被前沿分割成几个相互独立的区域,这就大大增加了产生残余三角形的概率.为了解决此问题,可以在前沿推进的过程中加入约束条件,以确保待合并的三角形始终是单连通域,从而避免了残余三角形的产生.首先引入几个定义.前沿边:位于四边形区域与三角形区域分界线上的边.前沿结点:位于前沿边上的结点.在以当前前沿(如图6所示的AB)生成四边形单元的过程中,可能出现的所有情况如图6所示.从图6中可以看出,在(a),(d),(f),(i)和(j)所示的情形下,三角形区域在前沿AB生成四边形以后仍然是一个单连通区域,此时可以以AB为前沿生成四边形ABCD,除此之外,在生成四边形ABCD后,前沿会将三角形区域分割成多个块,从而可能会导致残余三角形的形成,此时不能以AB为前沿生成四边形ABCD.用nFrontNode表示ABCD中前沿结点的个数,nFrontEdge表示ABCD中前沿边的个数,则前沿推进的约束条件可以归纳如下:1)nFrontNode=2;2)nFrontNode=3,nFrontEdge=2;3)nFrontNode=4,nFrontEdge>2.因此,只有满足这三个条件之一,才可以生成四边形.此外,除了上述10种情况以外,还有一种特殊情况,如图7所示.在常规的前沿推进的过程中,若出现如图8(a)所示的情形时(粗线段为前沿),以AB为前沿,在形成侧边时(如图8(b)所示),若α1满足要求,则BD是一条侧边,生成的如图8(b)所示的四边形ABDE,更新前沿后会产生如图8(c)所示的残余三角形BCD.若在前沿推进的过程中,加入上述约束条件,则可以避免残余三角形的产生,因为生成图8(b)所示的四边形ABDE时,nFrontNode=4,nFrontEdge=2,不满足约束条件,此时不能生成四边形,然后循环前沿链表中的下一前沿BC,对于可能生成的四边形BCDE(如图9(a)所示),nFrontNode=4,nFrontEdge=3,满足约束条件,则可生成四边形单元,更新前沿后如图9(c)所示,同理,再以EF为前沿时生成四边形EFAB,更新前沿后如图9(d)所示,显而易见,经过了带约束的前沿推进操作,生成了四边形ABCD和EFAB后,三角形区域仍是一个单连通域,没有残余三角形的产生.从图9可以看出,带约束条件的前沿推进不会产生残余三角形,从而避免了处理残余三角形这一复杂程序带来的时间消耗,以保证生产高质量的全四边形网格,提高了算法效率和网格质量.本文采用几何准则对生成的网格质量进行评价.如图10所示的四边形ABCD,连接其对角线AC,BD,得到ABC,ABD,CDB,CDA等4个三角形,先计算这4个三角形的质量因子,然后根据这4个三角形的质量因子,得到四边形ABCD的质量因子.其中三角形的质量因子α[9]定义如下:α的意义就是三角形的面积与边长的平方和之比,0<α≤1,α越大表示质量越好.令4个三角形△ABC,△ABD,△CDB,△CDA的α因子依次为α1,α2,α3,α4,假设α1≥α2≥α3≥α4,则四边形ABCD的质量因子β[14]定义如下:其中0<β≤1,β越大表示网格质量越好.为了说明本文提出算法的优越性,下面给出一个带小孔的平板的算例(因为对称性,在分析时取其1/4即可).并和Owen的算法[13]以及胡向红等人的算法[10]进行对比,如图11所示.从图11和表1中可以看出:Owen的算法[13]生成的四边形网格质量较好,但是有残余三角形的存在.胡向红等人的算法[10]生成的网格没有残余三角形,但是网格质量较差.本文提出的算法可以有效地解决上述两种算法的不足,生成高质量的全四边形网格.下面给出一个复杂多连通域实体的表面网格划分(如图12所示).从图12中可以看出,对于复杂的多连通域,本文的算法也可以生成高质量的四边形网格,从而进一步说明该算法的可行性.本文提出的算法是一种间接的四边形网格生成方法,该方法基于前沿推进的思想,在单个前沿推进的过程中,取合适侧边和顶边,控制当前前沿生成的网格质量,并在推进的过程中加入约束条件,避免了残余三角形的产生,数值算例表明该算法能够生成质量较好的四边形网格.相对于常规的前沿推进算法,本文方法可以有效避免残余三角形的产生,提高了算法的效率和网格生成的质量.相对于胡向红的区域生长算法[10],本文方法可以有效控制当前四边形的质量,从而使最终生成的网格质量有显著的提高.†通讯联系人,E-mail:***************.cn【相关文献】[1] ZHANG Jianming,QIN Xianyun,HAN Xu.A boundary face method for potential problems in three dimensions[J].International Journal for Numerical Method inEngineering,2009,80(3):320-337.[2] 张见明,李湘贺,陆陈俊,等.多域边界面法在稳态热传导问题中的应用[J].湖南大学学报:自然科学版,2014,41(5):58-64.ZHANG Jianming,LI Xianghe,LU Chenjun,et al.Application of multi-domain boundary face method in steady state heat conduction[J].Journal of Hunan University:Natural Sciences,2014,41(5):58-64.(In Chinese)[3] RUIZ-GIRONS E,SARRATE J.Generation of structured meshes in multiply connected surfaces using subsub-mapping[J].Advances in Engineering Software,2010,41(2):379-387.[4] MUKHERJEE N.An art gallery approach to submap meshing[J].Procedia Engineering,2014,82(82):313-324.[5] BLACKER T D,STEPHENSON M B.Paving:a new appro-ach to automated quadrilateral mesh generation[J].International Journal for Numerical Methods in Engineering,1991,32(4):811-847.[6] 梅中义,范玉青.一种用于自动生成二维全四边形有限元网格的改进的铺设算法[J].计算机辅助设计与图形学学报,2000,12(6):428-434.MEI Zhongyi,FAN Yuqing.A modified paving technique for quadrilateral mesh generation in planar regions[J].Journal of Computer-Aided Design & Computer Graphics,2000,12(6):428-434.(In Chinese)[7] PELLENARD B,ORBAY G,CHEN J,et al.QMCF:QMorph cross field-driven quad-dominant meshing algorithm[J].Procedia Engineering,2014,82:338-350.[8] MERHOF D,GROSS R,TREMEL U,et al.Anisotropic quadrilateral meshing generation:anindirect approach[J].Engineering Computational Technology,2007,38(11/12):860-867.[9] LEE C K,LO S H.A new scheme for the generation of a graded quadrilateralmesh[J].Computers & Structures,1994,52(5):847-857.[10]胡向红,陈康宁.由区域生长算法实现四边形网格划分[J].计算机辅助设计与图形学学报,2004,16(1):29-34.HU Xianghong,CHEN kangning.Generating quadrilateral meshes by using region growth algorithm[J].Journal of Computer Aided Design & Computer Graphics,2004,16(1):29-34.(In Chinese)[11]LO S H.Generating quadrilateral elements on plane and over curvedsurfaces[J].Computers & Structures,1989,31(3):421-426.[12]OWEN S J,STATEN M L,CANANN S A,et al.Q-Morph:an indirect approach to advancing front quad meshing[J].International Journal for Numerical Methods in Engineering,1999,44(9):1317-1340.[13]OWEN S J,STATEN M L,CANANN S A.Advancing front quadrilateral meshing usingtriangle transformations[C]//Proceedings of the 9th International Meshing Roundtable.New Orleans,2000:409-428.[14]PARK C,NOH J S,JANG I S,et al.A new automated scheme of quadrilateral mesh generation for randomly distributed line constraints[J].Computer-Aided Design,2007,39(4):258-267.。
基于区域分解技术的并行四面体网格生成算法
Pa r a l l e l t e t r a h e d r a l me s h g e n e r a t i o n a l g o r i t h m b a s e d o n d o ma i n d e c o mp o s i t i o n
XU Qu a n ,CUI Ta o 。 ,LI U Qi n g - k a i ,CAO Xi a o — l i n
2 0 1 4年 1月
计 算机 工程 与设计
C OM PUTER ENGI NEERI NG AND DES I GN
J a n .2 0 1 4
Vo 1 . 3 5 No . 1
第3 5卷
第 1期
基 于 区域 分 解 技 术 的 并 行 四面体 网格 生成 算 法
徐 权 , 崔 涛 ,刘青凯 ,曹小林
法相 比 , 不仅 大 大 降 低 了 网格 生成 的 时 间 , 同 时保 证 了子 区域之 间 交 界 面 上 网格 的 一 致 性 和 协 调 性 , 生成 了 高质 量 的 四 面
体 网格 。
关键 词 :网格 生成 ;约束 D e l a u n a y三角化 ;并行 四面体 网格 生成 ;区域 分解 ;并行算 法 中图法分 类号 :TP 3 1 1 . 1 文献标识号 :A 文章编号 :1 0 0 0 — 7 0 2 4( 2 0 1 4 )0 1 — 0 1 5 3 — 0 5
Ab s t r a c t : A p a r a l l e l t e t r a h e d r a l me s h g e n e r a t i o n me t h o d b a s e d o n d o ma i n d e c o mp o s i t i o n i s p r e s e n t e d .I t c a n b e a p p l i e d f o r t h e 3 一 d i me n s i o n c o mp l e x g e o me t r i e s .B a s e d o n t h e d i v i d e a n d c o n q u e r p r i n c i p l e ,t h e 3 D c o mp u t a t i o n a l d o ma i n i s d i v i d e d i n t o ma n y s u b - d o ma i n s ,wh i c h a r e d i s t r i b u t e d i n t o e a c h p r o c e s s o r .Fi n a l l y ,f o r s u b - d o ma i n s ,c o n s t r a i n e d De l a u n a y t r i a n g u l a t i o n a n d i t e r a t i v e t e c h n o l o g y a r e u s e d t o c o n s t r u c t t e t r a h e d r a l me s h e s s i mu l t a n e o u s l y .Th e n u me r i c a l e x p e r i me n t s s h o w t h i s a l g o r i t h m i s s c a l a b l e a n d s t a b l e ,a n d i t c a n g u a r a n t e e t h e c o n s i s t e n c y o f t h e me s h e s o n t h e i n t e r f a c e a n d c a n g e n e r a t e h i g h q u a l i t y t e t r a h e d r a l me s h e s a t
四边形网格——精选推荐
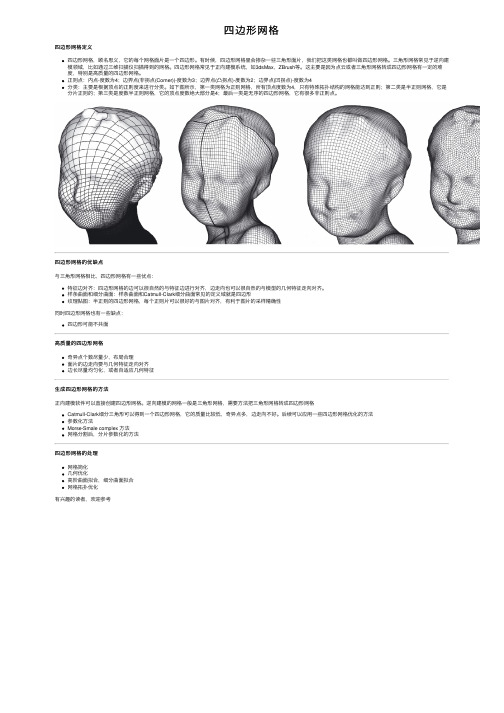
四边形⽹格四边形⽹格定义四边形⽹格,顾名思义,它的每个⽹格⾯⽚是⼀个四边形。
有时候,四边形⽹格⾥会掺杂⼀些三⾓形⾯⽚,我们把这类⽹格也都叫做四边形⽹格。
三⾓形⽹格常见于逆向建模领域,⽐如通过三维扫描仪扫描得到的⽹格。
四边形⽹格常见于正向建模系统,如3dsMax,ZBrush等。
这主要是因为点云或者三⾓形⽹格转成四边形⽹格有⼀定的难度,特别是⾼质量的四边形⽹格。
正则点:内点-度数为4;边界点(⾮拐点(Corner))-度数为3;边界点(凸拐点)-度数为2;边界点(凹拐点)-度数为4分类:主要是根据顶点的正则度来进⾏分类。
如下图所⽰,第⼀类⽹格为正则⽹格,所有顶点度数为4,只有特殊拓扑结构的⽹格能达到正则;第⼆类是半正则⽹格,它是分⽚正则的;第三类是度数半正则⽹格,它的顶点度数绝⼤部分是4;最后⼀类是⽆序的四边形⽹格,它有很多⾮正则点。
四边形⽹格的优缺点与三⾓形⽹格相⽐,四边形⽹格有⼀些优点:特征边对齐:四边形⽹格的边可以很⾃然的与特征边进⾏对齐,边⾛向也可以很⾃然的与模型的⼏何特征⾛向对齐。
样条曲⾯和细分曲⾯:样条曲⾯和Catmull-Clark细分曲⾯常见的定义域就是四边形纹理贴图:半正则的四边形⽹格,每个正则⽚可以很好的与图⽚对齐,有利于图⽚的采样精确性同时四边形⽹格也有⼀些缺点:四边形可能不共⾯⾼质量的四边形⽹格奇异点个数尽量少,布局合理⾯⽚的边⾛向要与⼏何特征⾛向对齐边长尽量均匀化,或者⾃适应⼏何特征⽣成四边形⽹格的⽅法正向建模软件可以直接创建四边形⽹格。
逆向建模的⽹格⼀般是三⾓形⽹格,需要⽅法把三⾓形⽹格转成四边形⽹格Catmull-Clark细分三⾓形可以得到⼀个四边形⽹格,它的质量⽐较低,奇异点多,边⾛向不好。
后续可以应⽤⼀些四边形⽹格优化的⽅法参数化⽅法Morse-Smale complex ⽅法⽹格分割后,分⽚参数化的⽅法四边形⽹格的处理⽹格简化⼏何优化⾼阶曲⾯拟合,细分曲⾯拟合⽹格拓扑优化有兴趣的读者,欢迎参考。
平面任意区域四边形网格自动生成的一种方法

平面任意区域四边形网格自动生成的一种方法
顾元宪;马正阳
【期刊名称】《计算机辅助设计与图形学学报》
【年(卷),期】1998(010)005
【摘要】在改进节点连接法的基础上,提出了一种平面任意区域的有限元网格全自动剖分方法,既能快速生成四边形单元网格,也能生成三角形单元网格;【总页数】8页(P432-439)
【作者】顾元宪;马正阳
【作者单位】大连理工大学工程力学系;大连理工大学工程力学系
【正文语种】中文
【中图分类】TP391.72
【相关文献】
1.一种平面区域四边形网格生成方法 [J], 但文蛟;张平;胡树根;王耘
2.一种平面区域四边形网格生成方法 [J], 但文蛟;张平;胡树根;王耘
3.任意平面区域三角形网格的全自动生成算法 [J], 张修忠;金生
4.任意平面区域的变密度四边形网格生成方法 [J], 杨晓东;申长雨;陈静波;刘春太
5.任意四边形网格上解辐射输运方程的一种数值方法 [J], 冯庭桂
因版权原因,仅展示原文概要,查看原文内容请购买。
平面四边形网格自动生成方法研究
第4类,封闭单元操作,在铺砌过程的最后阶段只 剩下6个节点时,根据铺砌边界上大鱼150º 的节点内角 数目和相对位臵,产生封闭单元。
网格中单元的大小由铺砌边界上的节点的空间大 小所决定。在铺砌过程中,维持这一空间大小不变。这 样,我们可以通过修改固定节点的空间大小来控制单元 的大小。各个节点的空间大小可以不相同,因为大小不 一的单元组成的网格,有利于分析单元,便于网格的疏 密分布。
②平面四边形网格的生成方法有两类主要的方法。 一类是间接法,即在区域内部先生成三角形网格, 然后分别将两个相邻的三角形合并成为一个四边形。生 成的四边形的内角很难保证接近直角。所以再采用一些 相应的修正方法加以修正。间接法优点是首先就得到了 区域内的整体的网格尺寸的信息,对四边形网格尺寸梯 度的控制一直是四边形网格生成技术的难点。缺点是生 成的网格质量相对比较差,需要多次的修正,同时需要 首先生成三角形网格,生成的速度也比较慢,程序的工 作量大。 另外一类是直接法,二维的情况称为铺砖法。采 用从区域的边界到区域的内部逐层剖分的方法。这种方 法到现在已经逐渐替代间接法而称为四边形网格的主要 生成方法。它的优点是生成的四边形的网格质量好,对 区域边界的拟合比较好,最适合 流体力学的计算。缺 点是生成的速度慢,程序设计复杂。
3、边界节点数的调整
第一种方法:将节点1、2合并成节点4,节点4的位 臵取节点1、2、3的平均位臵。
第二种方法;删除单元a以后,将节点1、2合并成 节点4,节点4的位臵取节点1、2、3的平均位臵。
以上两种方法每次使栅格边界减少2个节点,如果 要减少一个可删除单元1,、2、3、4以后.,合并相应的 节点。
基区划分任意一个几何轮廓若干个子区域直线段子区域曲线段子区域四边形基区类四边形基区类四边形基区是指在一定条件下可以把曲线段近似看作一条直线来处理把它看成是四边形的一条基区网格生成21四边形基区的网格生成由于基区形状与所要生成的单元具有相似性这种相似性的程度越高就越容易处理
一种城市路网多层次复合网格模式识别方法
㊀㊀第52卷㊀第11期测㊀绘㊀学㊀报V o l.52,N o.11㊀2023年11月A c t aG e o d a e t i c ae tC a r t o g r a p h i c aS i n i c a N o v e m b e r,2023引文格式:王安东,武芳,巩现勇,等.一种城市路网多层次复合网格模式识别方法[J].测绘学报,2023,52(11):1994G2006.D O I:10.11947/j.A G C S.2023.20220528.WA N G A n d o n g,WUF a n g,G O N GX i a n y o n g,e t a l.Ar e c o g n i t i o n a p p r o a c h f o r c o m p o u n d g r i d p a t t e r no f u r b a n r o a d n e t w o r k s [J].A c t aG e o d a e t i c a e tC a r t o g r a p h i c aS i n i c a,2023,52(11):1994G2006.D O I:10.11947/j.A G C S.2023.20220528.一种城市路网多层次复合网格模式识别方法王安东,武㊀芳,巩现勇,翟仁健,刘呈熠,邱㊀越,张寒雪信息工程大学地理空间信息学院,河南郑州450001A r e c o g n i t i o na p p r o a c h f o r c o m p o u n d g r i d p a t t e r no f u r b a n r o a dn e t w o r k s W A N G A n d o n g,W U F a n g,G O N G X i a n y o n g,Z H A IR e n j i a n,L I U C h e n g y i,Q I U Y u e,Z H A N GH a n x u eI n s t i t u t eo fG e o s p a t i a l I n f o r m a t i o n,I n f o r m a t i o nE n g i n e e r i n g U n i v e r s i t y,Z h e n g z h o u450001,C h i n aA b s t r a c t:A s t h es k e l e t o no fu r b a nc i t i e s,t h es p a t i a l p a t t e r nr e c o g n i t i o no f r o a dn e t w o r k s i so f g r e a t s i g n i f i c a n c ef o r m a p g e n e r a l i z a t i o n,s p a t i a ld a t a m i n i n g,a n d m u l t iGs c a l er e p r e s e n t a t i o n.T h i s p a p e r p r e s e n t sa na p p r o a c h t o r e c o g n i z i n g t h ec o m p o u n d g r i d p a t t e r no f r o a dn e t w o r k sw i t h l o c a l h e t e r o g e n e i t y b a s e do n r o a dm e s h e s.F i r s t l y,t h em u l t i l e v e l c o g n i t i v e c h a r a c t e r i s t i c s o f t h e l i n e a r a n d g r i d p a t t e r n o f r o a d m e s h e sa r ea n a l y z e d,a n dt h e m u l t i l e v e lc o g n i t i v eo r d e r,w h i c hf r o m b a s i c m e s h,c o m p o u n d m e s ht o r e g u l a r p a t t e r n,i s p r o p o s e d.S e c o n d l y,t h e r e c o g n i t i o n m e t h o d s o fi n c l u s i o n r e l a t i o n s h i p,p a r a l l e l r e l a t i o n s h i p,a n dl i n e a r p a t t e r n b e t w e e nr o a d m e s h e s a r e d e s i g n e d c o n s i d e r i n g t h e c o m p o s a b i l i t y, l i n e a r i t y,a n de x t e n s i b i l i t y o fc o m p o u n dl i n e a r p a t t e r n.F i n a l l y,t h el i n e a r p a t t e r n sa r ec o m b i n e d a n d d e c o m p o s e d t oe x t r a c t t h ec o m p o u n d g r i d p a t t e r no f r o a d m e s h e s.E x p e r i m e n t ss h o wt h a t t h e p r o p o s e d m e t h o d i s e f f e c t i v e f o r c o m p o u n d g r i d p a t t e r n r e c o g n i t i o nw i t h t h ea g r e e m e n t so f h u m a n s p a t i a l c o g n i t i v e c h a r a c t e r i s t i c s.K e y w o r d s:c a r t o g r a p h i c g e n e r a l i z a t i o n;r o a d n e t w o r k;r o a d m e s h e s;p a t t e r nr e c o g n i t i o n;m u l t i l e v e l c o g n i t i o n;g r i d p a t t e r n摘㊀要:道路网作为城市骨架,其模式识别对于地图综合㊁空间数据挖掘与多尺度表达具有重要意义.针对大比例尺数据中局部异质性明显的道路网格模式识别问题,提出基于网眼的城市道路多层次复合网格模式识别方法.首先分析了道路网眼直线和网格模式的多层次认知特点,提出了 基础网眼➝复合网眼➝规则模式 的多层次认知顺序;然后考虑复合直线模式的组合性㊁延伸性和直线性约束,设计了道路网眼直线模式㊁包含关系和并列关系的识别方法;最后通过对直线模式的组合分解,提取道路网眼的网格模式.试验表明本文方法能有效识别路网数据中的复合网格模式,识别结果符合人类认知特点.关键词:制图综合;道路网;网眼;模式识别;多层次认知;网格模式中图分类号:P208㊀㊀㊀㊀文献标识码:A㊀㊀㊀㊀文章编号:1001G1595(2023)11G1994G13㊀㊀城市道路网是城市范围内不同功能㊁等级㊁区位的道路,以一定密度和适当形式组成的网络结构[1].作为城市的基础骨架,其结构模式体现了城市的主要结构和空间格局,反映出城市的地形地貌特点㊁功能结构和规划治理情况,蕴含着大量城市形成和发展的内在机制[2].对其结构模式的挖掘和识别是地图综合㊁城市形成㊁更新和扩张㊁交通规划设计等领域的研究热点和难点[3G5].相关研究从不同研究重点出发,将道路网分为不同结构模式,如网格模式㊁环型模式㊁放射型模式㊁复杂道路交叉口等显式模式[6G11],以及城市中心㊁热点区域㊁城市建成区等隐式模式[12].网格模式作为城市道路网的典型结构模式,在城市布局中十分常见,在长达几千年的城市发展史上,都得到广泛的采用[13].道路网格模式的识别对城市空间特征挖掘㊁交通规划及地图自动综合具第11期王安东,等:一种城市路网多层次复合网格模式识别方法有重要意义.根据识别的基本模式单元,现有道路网格模式的识别方法可大体分为两类.(1)基于路段的识别方法.此类方法多将道路网抽象为图结构,以图中顶点作为基本处理单元,从顶点的几何㊁上下文关系特征中抽象出与路网结构相关的特征项,借助图论㊁统计学或机器学习方法进行处理或学习,实现网格模式识别.例如,基于道路结点和改进的霍夫变换策略来实现规则格网的识别[14];通过构建道路网对偶图,采用交㊁并㊁联合等图运算来提取基础格网模式[15];基于道路结点的几何㊁拓扑特征,利用多项式评定模型识别道路网中的典型结构模式[16];基于道路网的线性单元剖分,提出5种特征参量,采用支持向量机分类来提取网格模式[17G18];在构建道路网原始图的基础上,利用图卷积神经网络模型,通过学习人工标注样本,实现网格模式的识别[19]等. (2)基于网眼的识别方法.此类方法将道路网中路段围成的闭合区域转化为面,即道路网眼,通过计算网眼与邻近网眼的形状㊁方向㊁尺寸相似性及排列特征,采用邻近搜索㊁任务分类㊁隶属度计算或自组织映射聚类等方法完成网格模式的识别.例如,通过计算网眼的几何特征相似性,采用区域生长算法识别网格模式[20G21];基于网眼的形状和关系描述参量,采用机器学习算法识别网格模式,以减少参数阈值设置的人工干预[22G25],等.然而,当前研究中至少存在如下问题有待解决:①根据定义,道路网格模式的基本特征是由两组几乎平行的道路垂直相交构成,网眼形状大多为近似矩形或平行四边形.然而,基于路段的识别方法大多以道路网结构中的 正交性 原则为依据,设计网格模式的特征因子,忽略了网格模式中相邻网格间的尺寸㊁形状相似性和分布的延伸性.从结构模式的定义来看,这些研究的部分识别结果更接近于道路网的 正交模式 或 方格模式 ,而非 网格模式 .②基于网眼的已有识别方法均以单个网眼面要素及相邻网眼间 一对一 的邻近关系作为研究对象,对于整体规则㊁局部破碎的网眼群组,无法将其作为一个整体参与模式构建.为了解决具有局部异质性的道路网格模式识别问题,本文基于道路网眼,顾及视觉认知的层次性,提出一种城市道路网多层次复合网格模式的识别方法,主要解决两个问题:①道路网眼分布模式的多层次认知特征和定义;②网眼复合直线模式和复合网格模式的识别.1㊀道路网眼分布模式的多层次认知特点道路网眼是指道路网中路段围成的闭合区域.与其他面状地图要素相似,道路网眼群组具有丰富的分布模式,直线模式和网格模式是两种典型的分布模式.直线模式中道路网眼有规律地呈直线分布,网眼间具有相似的几何特征,如方向㊁尺寸等;网格模式由若干组近似平行的直线模式与另外若干组近似平行的直线模式,以近似正交的方式相交构成.作为道路对空间划分的结果,其分布模式与道路结构模式有着密切联系.道路网眼的直线和网格模式是道路网格模式的两种表现形式,图1中模式1㊁2分别为网眼的直线和网格模式,两组模式均表现为道路网的网格模式.因此,本文以道路网眼为基本模式单元,通过提取其直线和网格模式,实现道路网格模式的识别.图1㊀道路网结构模式与网眼分布模式F i g.1㊀T h es t r u c t u r a l p a t t e r no f r o a dn e t w o r k sa n dt h ed i s t r i b u t i o n p a t te r no fm e s h依据格式塔认知准则[26]和 大范围优先 的视知觉认知理论[27G28],人类更倾向于以 主体ң细节 的顺序来认知事物.道路网眼群组具有丰富复杂的几何㊁拓扑特征,人类的认知过程也必然遵循一定的顺序,从而形成了其空间关系的层次性.观察者观看地图时,首先关注道路网眼的整体特征,如图2(a)红色方框中网眼整体具有明显的网格模式特征;然后,才会注意到局部网眼间的细节特征,如图2(b)所示,蓝色网眼间的几何形态差异和复杂拓扑关系会被进一步感知.然而,当前相关研究仅考虑相邻单个网眼间的 一对一 关系,难以识别由多个不规则的网眼多边形拼接而成的网格网眼,对于大比例尺地图中局部异质性明显的道路网格模式,识别结果并不符合人类认知[29].5991N o v e m b e r 2023V o l .52N o .11A G C Sh t t p :ʊx b .c h i n a s m p .c om 图2㊀整体到局部的认知过程F i g .2㊀T h e c o gn i t i o n p r o c e s s f r o m w h o l e t o p a r t ㊀㊀为解决网格模式中局部网眼破碎的问题,本文引入 复合道路网眼 的概念.复合道路网眼的直线和网格模式具有多层次认知的特点:宏观尺度下,道路网眼整体呈直线或网格模式分布;中观尺度下,模式由几何特征相似㊁排列规律相近的简单或复合矩形网眼构成;微观尺度下,根据简单网眼的组合方式,复合矩形网眼进一步划分为包含关系和并列关系复合网眼.复合道路网眼直线和网格模式的多层次认知关系如图3所示.以图4(a)中道路网为例,各层次的具体含义如下.图3㊀道路网眼多层次认知关系F i g .3㊀T h e r e l a t i o n s h i p o fm u l t i l e v e l c o gn i t i on 图4㊀多层次认知过程F i g .4㊀T h em u l t i l e v e l c o gn i t i v e p r o c e s s ㊀㊀(1)整体层,包括直线模式和网格模式,其中直线模式的识别是网格模式识别的前提和保障.网眼直线模式具有以下的表现形式:①模式内部的各个网眼具有相似的形状㊁大小和方向特征;②模式内相邻网眼方向一致,且模式的全局方向与各网眼组件方向近似相同或正交;③模式内相邻网眼的公共边近似为两最小面积外界矩形的长边或短边,图4(b )中红色虚线分别表示呈直线模式分布的网眼.网格模式由多组直线模式近似垂直相交构成,处于更高的认知层次,如图4(b )中9组直线模式以近似正交的方式相交构成网格模式.(2)组件层,构成单元为近似矩形的道路网眼.根据矩形网眼所中的基础网眼数量,分为简单矩形网眼和复合矩形网眼,分别如图4(c )中网眼3㊁9和网眼1㊁2㊁4㊁5㊁6㊁7㊁8.其中,简单矩形网眼形状为近似矩形;复合矩形网眼包含多个任意形状的道路网眼,组合后形状为近似矩形.从矩形网眼与基础网眼的空间对应关系的角度来看,组件层中包含1ʒ1(简单网眼)和1ʒn (复合网眼)的空间对应关系.(3)原子层,构成单元为由道路网结点㊁路段直接围成的封闭区域多边形,即简单网眼.根据邻接关系,将组件层复合网眼中简单网眼间关系划分为包含关系和并列关系.包含关系复合网眼由一个主体网眼和若干次要网眼组成,如图4(d)中灰色网眼5㊁6,网眼8㊁9,网眼10㊁11和网眼17㊁18.主次网眼间空间邻近,整体轮廓互补.其中,主体网眼的面积相对较大,在视觉认知中占主导地位,反映该复合网眼的主要形状特征,如图4(d )中网眼6㊁8㊁10和18;次要网眼的面积相对较小,在视觉认知中占从属地位,如图4(d )中网眼5㊁9㊁11和17.并列关系复合网眼由若干简单网眼组成,网眼为任意形状多边形,组合后形状为近似矩形,并与相邻网眼构成直线模式.网眼间并列关系难以通过自底向上的组合方法进行探测,6991第11期王安东,等:一种城市路网多层次复合网格模式识别方法其关系的识别依赖于复合网眼邻域的模式特征.图4(d)中蓝色网眼1㊁2㊁3㊁4,网眼12㊁13和网眼14㊁15㊁16分别为具有并列关系的简单网眼.2㊀道路网多层次网格模式识别结合道路网眼的多层次认知特点,本文采用自底向上与自顶向下相结合的策略,提出一种多层次道路网眼直线和网格模式的识别方法,整体框架如图5所示,基本思想和关键步骤如下.(1)根据视知觉感知理论中完整性㊁规则性等心理倾向,采用自底向上的策略,合并具有包含关系的网眼,将整体规则㊁局部不规则的相邻网眼组合为视觉感知上更高级的复合网眼.(2)考虑相邻网眼间的尺寸㊁形状相似性和分布的直线性,构建直线模式结构化参数,以此为约束提取直线模式.(3)根据直线模式分布的延伸性,自顶向下构建直线模式连续匹配模板,搜索合并直线模式两端具有并列关系的道路网眼,实现复合直线模式的提取.(4)采用降维的思想,将直线模式网眼组以二维的线段表示,对其进行分解和组合,实现道路网眼网格模式的提取.图5㊀本文方法整体框架F i g.5㊀T h e f r a m e w o r ko f t h e p r o p o s e dm e t h o d道路网眼形状为近似矩形是其作为直线和网格模式的组成单元的必要条件[20G24].本文采用矩形度(R e c)和凹凸度(C o n v)[29]作为网眼矩形相似度的度量参数,具体含义与计算方法见表1.表1㊀网眼矩形相似度的度量参数T a b.1㊀T h em e t r i c s o f r o a dm e s h r e c t a n g l e s i m i l a r i t y参数参数含义计算方法矩形度R e c描述多边形呈矩形的程度网眼自身面积与其最小面积外接矩形面积的比值凹凸度C o n v描述道路网眼多边形的凹凸程度网眼面积与其凸包面积的比值2.1㊀简单直线模式识别简单直线模式由当前数据中的简单网眼构成,其正确识别是复合直线模式识别的基础.考虑直线模式中网眼的相似性㊁直线性和延伸性等结构特征,结合格式塔认知准则,从道路网眼的大小相似性㊁直线性和对齐程度3个方面引入识别道路网眼直线模式的结构化参数(表2).表2㊀网眼直线模式结构化参数T a b.2㊀T h e s t r u c t u r a l p a r a m e t e r s o f r o a dm e s h l i n e a r p a t t e r n参数参数含义计算方法面积比R a r e a描述两邻接道路网眼之间面积大小差异相邻网眼间较小网眼与较大网眼面积的比值方向差异D o r i e n t描述3个相邻道路网眼之间的直线性相邻3个网眼间质心连线的夹角公共边长度比R c e描述相邻道路网眼之间的对齐程度相邻网眼公共边与网眼最小外接矩形边长度比值的较小值㊀㊀根据直线模式的组织规律,同一模式内部要素间具有相似的几何形态结构.对于道路网眼,其几何形态结构主要表现为形状和大小.其中形状依靠上文中矩形相似度参数进行约束;大小相似度利用网眼面积比进行度量,面积比越大,网眼间大小相似程度越高.为保证模式中的网眼沿直线分布,以表2中方向差异参数作为约束,方向差异D o r i e n t越接近于180ʎ,模式的直线性越强.考虑到直线模式相邻网眼间具有相互对齐的特点,引入公共边长度比R c e对模式内相邻网眼间对齐程度进行约束.如图6所示,对于相邻网眼M1㊁M2,定义其公共边长度比R(c e)1,2为公共边(P1P2)长度与公共边对应网眼最小外接矩形边(E M1㊁E M2)长度的比值的较小值,公共边长度比7991N o v e m b e r 2023V o l .52N o .11A G C Sh t t p :ʊx b .c h i n a s m p .c o m 越接近于1,网眼对齐程度越高.图6㊀公共边长度比F i g .6㊀T h e l e n g t h r a t i oo f c o mm o ne d ge 综上,本文识别网眼简单直线模式的步骤如下.步骤1:根据网眼间是否具有公共边,构建相邻网眼间邻近关系,同时提取网眼群中矩形度和凹凸度分别大于阈值δR e c 和δC o n v 的简单矩形网眼,加入列表L i s t S G M .步骤2:选取L i s t S G M 中任一网眼M i 及其邻接网眼M j ,计算M i 与M j 的面积比(R a r e a )i ,j 和公共边长度比(R c e )i ,j ,若(R a r e a )i ,j >δa r e a 且(R c e )i ,j >δc e (式中δa r e a 和δc e 分别为人工设定的面积比和公共边长度比参数阈值),则将网眼M i 与M j 的邻近边e i ,j 加入直线模式临时列表t L i s t L P ,否则,返回步骤2.步骤3:设当前直线模式一侧搜索方向为{i ,j },即S e a r c h L e f t ={i ,j },另一侧搜索方向为{j ,i },即S e a r c h R i gh t ={j ,i },以S e a r c h L e f t ={i ,j }为起始搜索方向,选取M j 的邻接网眼M k ,若M j 除M i 不存在其他邻近网眼,则此搜索方向终止,以S e a r c h R i gh t ={j ,i }方向继续搜索.步骤4:计算M j 与M k 的面积比(R a r e a )j ,k 和公共边长度比(R c e )j ,k ,若(R a r e a )j ,k >δa r e a 且(R c e )j ,k >δc e ,则执行步骤5,否则,返回步骤3.步骤5:计算M i ㊁M j ㊁M k 的方向差异D o r i e n t ,若D o r i e n t >δo r i e n t ,则将e j ,k 添加至当前直线模式列表t L i s t L P 中,并令j =k ,否则,返回步骤3.步骤6:若当前直线模式向两侧搜索均终止,则该组直线模式识别结束,将当前直线模式列表t L i s t L P 加入直线模式识别结果列表L i s t L P 中,返回步骤2.循环步骤2 6,直至L i s t S G M 中全部网眼均被遍历.以图7(a)中道路网数据为例,经上述步骤识别的网眼简单直线模式如图7(b )中红色线段所示.受道路网中较低等级道路影响,一些在大尺度上认知为整体的网眼被分割成若干小网眼,呈现出局部破碎的现象,如图7(b )中网眼1㊁2㊁3.由图7(c )中网眼邻近关系可以看出,简单直线模式的提取方法仅利用简单网眼间 一对一 的邻近关系(蓝色线段),难以反映道路网的整体结构模式,需要进一步利用复合直线模式识别方法,提取局部破碎㊁整体规则的直线模式.图7㊀道路网眼简单直线模式识别结果F i g .7㊀T h e r e c o g n i t i o n r e s u l t s o f s i m pl e l i n e a r p a t t e r n 2.2㊀复合网眼构建与复合直线模式识别复合直线模式的识别是解决网眼局部异质性,实现由低级基础网眼到高级认知模式过渡的关键,其难点在于组件层中复合矩形网眼的识别和构建.对于复合矩形网眼中的包含关系和并列关系,本文分别采用自底向上和自顶向下的策略对其进行识别.2.2.1㊀包含关系识别根据包含关系网眼间轮廓互补的特点,参考文献[30]中对相离面要素主次关系识别的方法,引入公共边长周长比(R l e n g t h )和约束面积比(R c a )两个参数,分别从一维和二维两个维度描述相邻网眼之间的包含程度.以图8中道路网眼为例,红色线段P 2P 3P 4表示相邻网眼M 1㊁M 2间公共边,虚线矩形为M 2最小面积外接矩形S M B R M 2,灰色多边形P 1P 2P 3P 4为S M B R M 2与M 1的公共区域多边形,参数含义及计算方法见表3.8991第11期王安东,等:一种城市路网多层次复合网格模式识别方法图8㊀包含关系参数F i g .8㊀T h e i n c l u s i o n r e l a t i o n s h i ppa r a m e t e r 表3㊀包含关系识别参数T a b .3㊀T h e r e c o g n i t i o n p a r a m e t e r s o f i n c l u s i o n r e l a t i o n s h i p参数参数含义计算方法公共边周长比R L 描述两相邻网眼边界的包含程度相邻网眼公共边长度与网眼周长的比值约束面积比R c a描述两相邻网眼区域的包含程度网眼与相邻网眼最小面积外接矩形交集面积与网眼面积的比值根据包含关系参数和网眼矩形相似度参数,识别包含关系复合矩形网眼的步骤如下.步骤1:计算网眼矩形度R e c 和凹凸度C o n v ,将R e c <δR e c 或C o n v <δC o n v 的网眼加入列表m L i s t 中.从中选取网眼M i ,计算其与邻近网眼M j 的公共边周长比(R l e n g t h )i ,j 和约束面积比(R c a )i ,j ,若(R l e n g t h )i ,j >δL 且(R c a )i ,j >δc a ,则将网眼M i 和M j 记为包含关系组,其中δl e n g t h 和δc a 分别为人工设定的公共边周长比和约束面积比参数阈值.步骤2:合并网眼M i 与M j ,记新网眼为M n ,若R e c n >δR e c 或C o n v n >C o n v i ,说明次要网眼对主要网眼的规则程度具有补充作用,将M n 加入列表m L i s t 中,并从中删除M i 和M j ,否则删除M n .步骤3:循环步骤1㊁2,直至列表m L i s t 中的元素数量不再减少为止,此时全部具有包含关系的复合矩形网眼均被识别.以图7中道路网眼为例,利用上述步骤识别㊁合并包含关系网眼的过程如图9所示.图9(a )为步骤1包含关系的识别结果,粉色线段表示网眼间的包含关系.图9(b )为步骤2包含关系第一次合并结果(深色网眼),粉色线段表示所产生的新的包含关系.经数轮迭代,具有包含关系网眼的最终合并结果如图9(c )所示,其中深色网眼为合并后的包含关系复合网眼.图9㊀包含关系复合网眼识别与合并过程F i g .9㊀T h e r e c o g n i t i o na n d c o m b i n a t i o n p r o c e s s o f c o m p o u n dm e s h e sw i t h i n c l u s i o n r e l a t i o n s h i p2.2.2㊀并列关系识别及复合直线模式提取从认知角度来看,并列关系复合网眼产生于邻域内直线模式的延伸,例如对于图9(c )中邻近关系相似的网眼对1㊁2和2㊁3,网眼1㊁2更容易被组合为复合网眼.因此,本文利用网眼邻域的模式特征,采用自顶向下的匹配策略,识别具有并列关系的复合网眼.基本思想为:首先根据直线模式两端网眼确定初始匹配模板的几何特征;然后结合直线模式延伸性构建连续匹配模板,向两端搜索㊁匹配待识别网眼;最后结合直线模式约束条件,判定待识别网眼组合后能否构成直线模式,实现复合直线模式的提取.结合图9(a)中道路网眼,说明并列关系及复合直线模式识别方法的具体步骤.步骤1:合并具有包含关系的矩形网眼(图9(c )),提取简单直线模式(图10(a)中红色线段),存入S L P L i s t 中.步骤2:选取任意一组直线模式S L P i (图10(a)中红色加粗线段),提取其首㊁末端网眼的最小面积外接矩形,以首㊁末端网眼与其邻接网眼几何中心的相对距离d ㊁方向o 为约束,沿直线模式两端延伸方向计算匹配模板的位置,匹配模板分别记为T l ㊁T r (图10(a)中蓝色矩形).步骤3:搜索与T l 和T r 存在面状交集的网9991N o v e m b e r 2023V o l .52N o .11A G C Sh t t p :ʊx b .c h i n a s m p .c o m 眼,记为M s ,如果其模板重叠度(R t o )s ,l >δt o 或(R t o )s ,r >δt o ,则将M s 存入并列关系候选列表M L i s t 中,执行步骤4,否则,则执行步骤2,式中δT C 为人为设定的模板重叠度参数阈值.步骤4:若M l i s t 中网眼数量大于1,合并M L i s t 中全部网眼,记为M n ,如图10(b )中蓝色网眼,若R e c (M n )>δR e c ,则根据2.1节中方法,判断其能否满足直线模式结构化参数约束,若满足,执行步骤5,否则终止该侧搜索.步骤5:当直线模式S L P i 向两侧搜索均终止时,将其存入复合直线模式列表M L P L i s t,并从S L P L i s t 中移除,执行步骤2.循环步骤1 5,直至S L P L i s t 为空时,结束循环.识别结果如图10(c)所示,其中红色线段表示网眼直线模式.图10㊀并列关系网眼与直线模式识别过程F i g .10㊀T h e r e c o gn i t i o n p r o c e s s o f p a r a l l e l r e l a t i o nm e s h e s a n d l i n e a r p a t t e r n 2.3㊀网格模式提取道路网眼的网格模式由近似正交的直线模式相交构成,处于更高的认知层次.由网格模式概念可知,组成网格模式的直线模式之间需满足以下3项条件:①各组直线模式近似平行或正交;②正交的直线模式间具有相交关系;③各直线模式构成闭合回路.对于条件①,由于在直线模式中,网眼为方向一致的近似矩形,网眼构成的直线模式方向基本确定,若任意两组直线模式包含同一网眼,则其关系为近似正交;若任意两组不相交直线模式间,存在其他直线模式同时包含以上两组直线模式中的网眼,则两组直线模式近似平行.故条件①可由条件②代替.另外,若多组直线模式构成闭合回路,则相互正交的直线模式间必然相交,故条件③为条件②的充分条件.综上,本文通过对直线模式网眼构成闭合回路进行识别,提取其中的网格模式.当前研究大多采用图论中算法识别多组直线模式中的闭合回路[31G32],算法实现较为复杂.本文从几何角度出发,通过对直线模式邻近图中由结点和线段形成的封闭多边形进行聚类,实现网格模式的提取.以图11(a )道路数据为例,说明算法具体步骤.步骤1:以各直线模式中网眼几何中心为结点,依次连接相邻网眼,构建直线模式关系图G l(图11(b)中红色线段).步骤2:提取G l 中封闭区域多边形P (图11(b )中晕线多边形P 1㊁P 2㊁P 3),将其存入列表T P L i s t.步骤3:遍历T P L i s t ,若两多边形P i ㊁P j 间存在公共边(图11(b )中多边形P 2㊁P 3),则将其聚类为一组,存入列表C l u s t e r L i s t 中.图11㊀网格模式提取过程F i g.11㊀T h e e x t r a c t i o n p r o c e s s o f g r i d p a t t e r n 0002第11期王安东,等:一种城市路网多层次复合网格模式识别方法㊀㊀步骤4:根据聚类结果,提取每组聚类内多边形顶点所对应的道路网眼,记为一组网格模式网眼G r i d m ,存入G r i d _l i s t 中,如图11(c )中蓝色和黄色线段对应网眼分别为两组网格模式.3㊀试验与讨论3.1㊀试㊀验本文基于P y t h o n 和Q G I S 编程实现以上算法.试验分为两组,数据分别采用不同空间结构模式的国内外道路网数据.试验中网眼矩形度和凹凸度阈值的设置影响简单矩形网眼以及包含关系㊁并列关系的识别,结合前人的研究成果[29,33],取δR e c =0.9㊁δC o n v =0.95.算法中所涉及其他阈值设置的指导思想为:面积比和公共边长度比的阈值越大,方向差异的阈值越小,模式的直线性越强.在识别包含关系矩形网眼时,公共边周长比和约束面积比的阈值越大,主要网眼对次要网眼的包含程度越强;在识别并列关系矩形网眼时,模板重合度的阈值越大,模式的同质性越强.试验区域1为国外某地区道路网,数据来自O p e n S t r e e t M a p.如图12所示,所选试验区域内道路分布密度较高,密度不均匀,没有全局平稳的特征,存在支离破碎的短小路段,但大部分呈垂直交错结构分布,视知觉上呈现出明显的网格模式特征.试验区域包含2469个道路简单网眼.经反复测试,试验参数设置见表4.图12(b )中灰色和蓝色网眼分别为识别出的具有包含和并列关系的复合网眼,提取的直线模式和网格模式分别如图12(c )㊁(d)所示.图12㊀试验1直线模式和网格模式识别结果F i g .12㊀T h e r e c o g n i t i o n r e s u l t s o f l i n e a r p a t t e r na n d g r i d p a t t e r no f e x pe r i m e n t 1表4㊀参数阈值设置T a b .4㊀A d v i s a b l e p a r a m e t e r s e t t i n g试验简单直线模式识别包含关系识别并列关系识别面积比阈值方向差阈值公共边长度比阈值公共边周长比阈值约束面积比阈值模板重合度阈值试验10.510ʎ0.90.40.50.8试验20.410ʎ0.80.40.50.71002。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
定义3 前沿边. . 位于兰角形区域和四边形区 域分冲 线上的边. 定义 4 前沿结点. . 位于前沿边上的顶点. 定义 5 次前沿边. 于三角形区域中的非边 . 位 界边 , 其两个端点中至少有一个端点是前沿结点. 定义 6 边界环. . 由一系列边界边首尾依次相
法往往比较复杂或受到一定的限制. 为了减少四边
等〔」 ‘提出了前沿算法的线性改进算法— 分级算 。
法, 该算法虽然简单, 但是生成的四边形网格存在大
量的残余三角形; 赵熠等[J I提出的泛前沿算法虽然 1
克服了前沿算法的缺陷, 但是在最初生成的四边形 网格中仍存在一些残余三角形, 需要通过对这些三 角形进行移动来消除, 增加了算法的复杂性 针对 上述算法的不足, 本文提出了一种将三角形网格转
” 二t
法达到理论最大值 , 只能获得一个最大近似值 w .
在实际 算法中, 。 E用与其相对应的内 。 边L来代替.
为了获取 命 , 本文提出了区域生长算法来生成四边 形网 基本思想如下: 格, 通过三角形两两合并生成一 个连通的四边形区域和一个连通的三角形区域, 每 一次三角形合并操作都从生成的次前沿边中选择具
成的四边形网格存在少量的残余三角形; 阂卫东
四边形网格[ ; 。 〕 进行参数 曲面( 1 在 U 中, 3 如 N R SBzr - le 重构时也需要事先生成 U B , , i 等) ee BS n i p 相应的四 边形网格〔 1与全自 4. - 5 动生成三角形网格 相比, 前只有少数的方法能直接生成四边形网格, 目 如四叉树法[ 铺路法1、 [ 6 1 7 映射法[等, 1 “ 而且这些算 」
门户 -一
内 一 al
< a 4
x 2 a
图 1 四边形 的 4个外角
凸四 R 边形的 值介于0 1 和 之间, 当四边形退 化为三角形时P o R = ; 值越大, 表明四 边形质量越 好, 越接近于 矩形. 由于凹四边形的R值也大于。 , 因此无法通过 R 值来表明四边形的凹凸性. 如图2
连接 F, 3D
B Leabharlann 图 2 对角线与 4条边形成的 4 个夹角
刀=1
刀- _ p
刀= . 02 5
卢= . 03 ; i
刀= 1 . 074
图3 一些典型平面四边形的 R 值
3 四边形网格的生成
3 1 相关定义 .
定义 1 度. 网格中与某个顶点相邻的元素( . 三
1 引
言
间接算法的一个重要环节. 研究人员已经提出了很多由三角形网格生成四
在有限元分析中广泛使用三角形网格, 但有时 为了提高分析精度或满足一定的特殊要求需要建立
边形网格的算法, h 等[提出了前沿算法, Zu [ 9 , 该算 法需要进行烦琐的前沿拆分、 合成和求交操作, 且生
a d at qara rl se ad m cnt in cnios i ps o te ri go q ly dit a mehs s e s a i od i ae oe n m g g o u i u le n o o r n g t n r m d h e n poeue ao gnrt g le tag s T e sm s oti oe t n a t e t r i te rcd r t vi ee i i a d nl . n e oh g r i s a n en h o d a n s t r e h o m o i n p a o r k o e e f i t l ditrl se. n i q araea mehs ia u l K y rs eh eao ; dit ame ; nu r s e w d u ra rl h tagl meh o m s gnr i qa le e tn s r i a
研究方向为逆 向工程 .A C D&C 陈康宁, 13 G. 男.95生. 教授 博士生导师 主要研究方向为计算机集成质量系统
万方数据
计算机辅助设计与图形学学报
20 0 4年
Z 四边形质量因子 p
定义四 边形质量因子1 3 的方法比 较多[ 1, 14 本 21 文根据四边形的4 条边所夹的4 个外角来定义R 值.
第1 6卷 第 1 期
20 0 4年 1 月
计算机辅助设计与图形学学报
J OUR L F NA O C OMP UTE AI E D SGN & C R D D E I OMP E GR HIS UT R AP C
Vo. N . l1 , 1 6 o J ,2 0 - 04
结束.
34 三角形合并的约束条件 .
在三角形合并过程可能发生的各种情形如图 6
所示.
图 5 由三角形 网格生成的带权无 向图
要使合并后生成的四边形网格质量最优, 理论 上相当于从无向图中选择 K/ 2条边进行三角形合
并 作,得w一艺c i 大 但 际 用 无 操 使 an . 实 应 中 ;最 ,
角形或四边形) 的个数. 定义 2 边界边. . 网格中只有一个元素( 三角形
或四边形) 与其相邻的边
行三角形合并操作之前需要对三角形网格做预处 理. 图4所示为网格中度为 3 4的顶点, 和 由于与这 类顶点相邻的三角形在合并后很容易生成凹四边 形, 因此可以先将这类顶点从网格中删除, 分别做如 图4 所示的操作.
As a rh t ip v t qat ognr i qar t am s s bt c r t A i g wh im m r e ul f e tg dle l h fm r o r t ao t o o h e n g o l g e i y e an u i r e e r a o tagl oe ip ps . m t d i is w y e i to aet nl tgnr e r nu r s r oe T e h ot z te o m r n w aj n tag s ee t i a n s o d h e o p m e h a f g g d c r e o a i
为删除边, 合并与其相邻的两个三角形生成一个新四边形.
S p. F n dei , Fotdei 和Fot t 4 更新 r t g s Sbr EgLs r - e o E Lt u n t n 从uLs 如果 Sbr ti 非空, l i, , t uFo Ls n t 则返回S p; t 3否则算法 e
一 争
几
岁
凡
弓
所示, 对于四边形 A C 连接顶点 A, B D, C形成对角 线, 得到四边形的4 条边与此对角线所形成的4 个
夹角分别为 Yl 7和 八; Y 十Y李1 ’ l Y, 2 3 若 , 2 8或 0 Y十Y11 ' 3 4 8, > 0 则表明该四 边形是凹四边形; 同理,
由区域生长算法实现四边形网格划分
胡向 红
摘 法
陈 康宁
〔 西安交通大学机械工程学院机械电子工程系 西安 704 ) 10 9
要 针对当前各种三角形网格转化为四边形网格算法的缺陷, 出一种实现这种转化的算法— 区域生长算 提 该算法通过有选择地合并三角形来获得高质量的四边形网格, 并且对两个三角形的合并增加约束条件以避免在
H Xagog hn nn g u nhn i C e K gi a n
( eat et hr n , ni e n , - J M c na E gn r g X 'n om U i rt, 'n 109 Dp r n o Mn am i E gn r g S! 1 e a i l i e n , n J r g v s X r 704) m f , ei c 月 h e n ei i i , n ei a y i.
化为 四边形网格的新算法— 区域生长算法.
形网格生成的难度, 通常采用间接算法, 即先生成三 角形网格, 然后再将其转化为四边形网格. 因此, 如
何将 已生成的三角形 网格转化为四边形网格是实施
原稿收到日期: 0-1 9修改稿收到日期: 0 - - 本课题得到国家自然科学基金(9705资助 胡向红 男 17 生、 2 213 0 2 3 42 0 00 5657) 98 硕士, 主要
生成四边形网格的过程中产生残余三角形; 同时对生成的四边形网格进行一系列的质量改善操作
关扭词 网格划分; 四边形网格; 三角形网格 中图法分类号 T 31 P9
G nrt g araea Mehs U ig g n o t Agr h eeai Q di t l se b s R i G w h oi m n u l r y n e o r l t
如图 t 所示, 四边形 A C 〕 4个外角分别 为 设 BL的
可以作同 样的 判断, 对于凹四边形的a可以赋值为 一. 1 一些典型平面四 边形的 月 值如图3 所示,
a, a 和 a, l a, 4 2 3 对其进行降序排列, aia% 即 , 2 aia, 3 4则四边形的质量因子 R 可定义为
并后生成的新前沿与某一边界环相交, 并且该边界 环不属于前沿的一部分 , 则将该边界环加人到前沿
非前沿结点
卿 四形城 边区 口 三形域 角区
图 6 三角形合并过程 中可能出现的 1 种基本情况 7
D(-12一, 来表示, i ,, K) 任意两个相邻的三角形
结点D 和几用一条 。 且 , 边E连接, 将这两 个相邻三 角形合 并后生成的四边形质量因 i 子R作为权赋给 边E , ;则原三 , 角形网格将形成一个带权无向图, 如
图 5所 示 .
四 形 量因 边 质 子凡,将 作 权 赋 这两 三 并 其 为 值 给 个 角形的 公 共 ;从! } 选择 边L, L 中 具有最大 值的 为 边生成 , 权 边作 删除
连生成的一个封闭环. 3 2 三角形网格的预处理 .
a度为3 的顶点的处理