《控制工程基础》期末复习题及答案_81251553585744438
《控制工程基础》期末复习题及答案_81251553585744438
《控制工程基础》期末复习题一、选择题1、采用负反馈形式连接后,则 ( )A 、一定能使闭环系统稳定;B 、系统动态性能一定会提高;C 、一定能使干扰引起的误差逐渐减小,最后完全消除;D 、需要调整系统的结构参数,才能改善系统性能。
2、下列哪种措施对提高系统的稳定性没有效果 ( )。
A 、增加开环极点;B 、在积分环节外加单位负反馈;C 、增加开环零点;D 、引入串联超前校正装置。
3、系统特征方程为 0632)(23=+++=s s s s D ,则系统 ( )A 、稳定;B 、单位阶跃响应曲线为单调指数上升;C 、临界稳定;D 、右半平面闭环极点数2=Z 。
4、系统在2)(t t r =作用下的稳态误差∞=ss e ,说明 ( )A 、 型别2<v ;B 、系统不稳定;C 、 输入幅值过大;D 、闭环传递函数中有一个积分环节。
5、对于以下情况应绘制0°根轨迹的是( )A 、主反馈口符号为“-” ;B 、除r K 外的其他参数变化时;C 、非单位反馈系统;D 、根轨迹方程(标准形式)为1)()(+=s H s G 。
6、开环频域性能指标中的相角裕度γ对应时域性能指标( ) 。
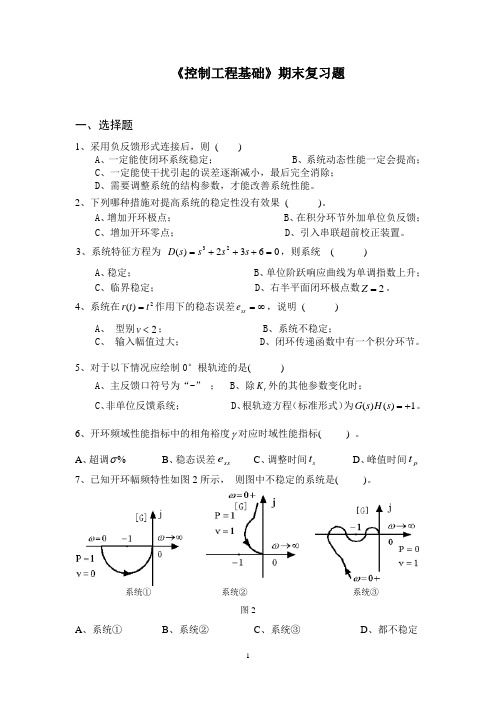
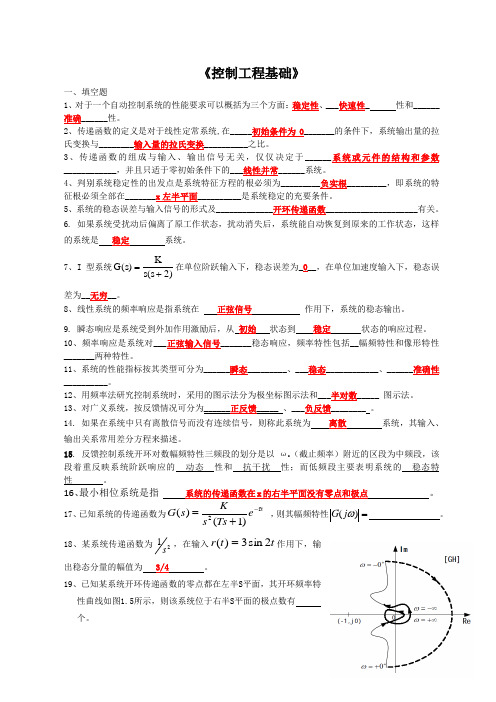
A 、超调%σB 、稳态误差ss eC 、调整时间s tD 、峰值时间p t7、已知开环幅频特性如图2所示, 则图中不稳定的系统是( )。
系统① 系统② 系统③图2A 、系统①B 、系统②C 、系统③D 、都不稳定8、若某最小相位系统的相角裕度0γ>,则下列说法正确的是 ( )。
A 、不稳定;B 、只有当幅值裕度1g k >时才稳定;C 、稳定;D 、不能判用相角裕度判断系统的稳定性。
9、若某串联校正装置的传递函数为1011001s s ++,则该校正装置属于( )。
A 、超前校正 B 、滞后校正 C 、滞后-超前校正 D 、不能判断10、下列串联校正装置的传递函数中,能在1c ω=处提供最大相位超前角的是:A 、 1011s s ++B 、1010.11s s ++C 、210.51s s ++D 、0.11101s s ++ 11、关于传递函数,错误的说法是 ( )A 传递函数只适用于线性定常系统;B 传递函数不仅取决于系统的结构参数,给定输入和扰动对传递函数也有影响;C 传递函数一般是为复变量s 的真分式;D 闭环传递函数的极点决定了系统的稳定性。
控制工程基础期末复习题(带答案的)
一、填空题(部分可能模糊的已给出参考答案):1. 对时域函数进行拉氏变换:)(1t = 、t = 、at e -= 、sin tω= 。
2. 自动控制系统对输入信号的响应,一般都包含两个分量,即一个是瞬态响应分量,另一个是稳态 _响应分量。
3. 在闭环控制系统中,通过检测元件将输出量转变成与给定信号进行比较的信号,这个信号称为_____反馈___。
4. 若前向通道的传递函数为G(s),反馈通道的传递函数为H(s),则闭环传递函数为___ __5. 函数f(t)=的拉氏变换式是 。
6. Bode 图中对数相频特性图上的-180°线对应于奈奎斯特图中的__负实轴_________。
7. 闭环系统稳定的充要条件是所有的闭环极点均位于s 平面的 右半平面 半平面。
8. 已知传递函数为2()k G s s=,则其对数幅频特性L (ω)在零分贝点处的频率数值为ω=9. 在系统开环对数频率特性曲线上,低频段部分主要由 积分 环节和 比例 决定。
10. 惯性环节的传递函数11+Ts ,它的幅频特性的数学式是 ,它的相频特性的数学式是 ωT arctan - 。
11. 传递函数的定义是对于线性定常系统,在 初始条件为零 的条件下,系统输出量的拉氏变换与 输入量的拉氏变换 之比。
12. 瞬态响应是系统受到外加作用激励后,从 初始 状态到 最终或稳定 状态的响应过程。
13. 判别系统稳定性的出发点是系统特征方程的根必须为 负实根或负实部的复数根 ,即系统的特征根必须全部在 复平面的左半平面 是系统稳定的充要条件。
14. I 型系统G s K s s ()()=+2在单位阶跃输入下,稳态误差为 0 ,在单位加速度输入下,稳态误差为 ∞ 。
(参考教材P89)15. 频率响应是系统对 正弦输入 稳态响应,频率特性包括 幅频和相频 两种特性。
16. 如果系统受扰动后偏离了原工作状态,扰动消失后,系统能自动恢复到原来的工作状态,这样的系统是 (渐进)稳定的 系统。
控制工程基础复习题答案(修)
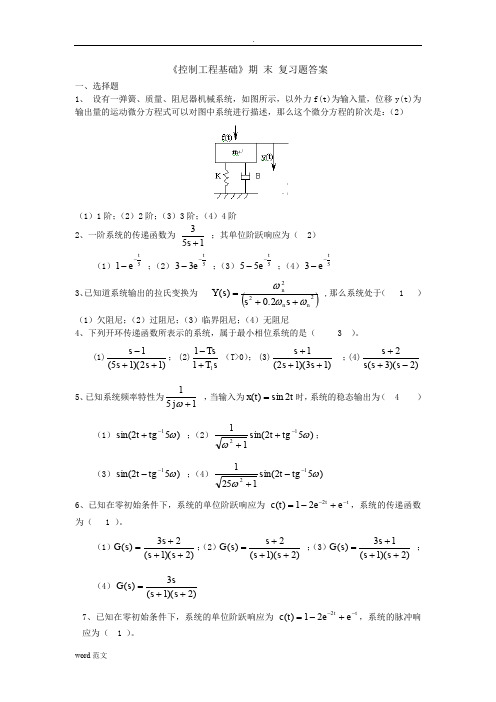
《控制工程基础》期 末 复习题答案一、选择题1、 设有一弹簧、质量、阻尼器机械系统,如图所示,以外力f(t)为输入量,位移y(t)为输出量的运动微分方程式可以对图中系统进行描述,那么这个微分方程的阶次是:(2)(1)1阶;(2)2阶;(3)3阶;(4)4阶 2、一阶系统的传递函数为153+s ;其单位阶跃响应为( 2) (1)51te-- ;(2)533t e -- ;(3)555te-- ;(4)53te--3、已知道系统输出的拉氏变换为 ()222.20)(nn ns s s Y ωωω++= ,那么系统处于( 1 ) (1)欠阻尼;(2)过阻尼;(3)临界阻尼;(4)无阻尼4、下列开环传递函数所表示的系统,属于最小相位系统的是( 3 )。
(1))12)(15(1++-s s s ; (2)s T Ts 111+- (T>0); (3))13)(12(1+++s s s;(4))2)(3(2-++s s s s 5、已知系统频率特性为151+ωj ,当输入为t t x 2sin )(=时,系统的稳态输出为( 4 )(1))52sin(1ω-+tg t ;(2))52sin(1112ωω-++tg t ;(3))52sin(1ω--tg t ;(4))52sin(125112ωω--+tg t6、已知在零初始条件下,系统的单位阶跃响应为 t te e t c --+-=221)(,系统的传递函数为( 1 )。
(1))2)(1(23)(+++=s s s s G ;(2))2)(1(2)(+++=s s s s G ;(3))2)(1(13)(+++=s s s s G ;(4))2)(1(3)(++=s s ss G7、已知在零初始条件下,系统的单位阶跃响应为 t te e t c --+-=221)(,系统的脉冲响应为( 1 )。
(1)t te e t k ---=24)( (2) t t e e t k ---=4)( (3)t te et k --+=24)( (4) t t e e t k 24)(---=8、系统结构图如题图所示。
控制工程基础期末考试复习资料

《控制工程基础》课程综合复习资料一、单选题1. 判断下面的说法是否正确:偏差()t ε不能反映系统误差的大小。
(A)正确(B)错误答案:B2. 判断下面的说法是否正确:静态速度误差系数v K 的定义是20lim .()s s G s →。
(A)正确(B)错误答案:B3.二阶振荡环节的传递函数G(s)=()。
(A)22,(01)21Ts T s Ts ξξ<<++ (B)22,(01)21T T s Ts ξξ<<++ (C)221,(01)21T s Ts ξξ<<++ (D)22,(01)21s T s Ts ξξ<<++ 答案:C4.函数5()301G jw jw =+的幅频特性()A w 为()。
(A)(B)(C)(D)259001w + 答案:D5.某一系统的误差传递函数为()1()1()i E s X s G s =+,则单位反馈系统稳态误差为()。
(A)01lim ()1()i s s X s G s →+ (B)01lim ()1()i s X s G s →+ (C)1lim ()1()i s s X s G s →∞+ (D)1lim ()1()i s X s G s →∞+ 答案:A6.某系统的传递函数为21()56s s s s φ+=++,其单位脉冲响应函数0()x t =()。
(A)23(2)1()t t e e t ---+(B)23(2)1()t t e e t --+(C)1()t(D)0答案:A7.图中系统的脉冲传递函数为()。
(A)1010()(1)()(1)()T T C z z e R z z z e --+=-+ (B)1010()(1)()(1)()T T C z z e R z z z e ---=-+ (C)210()10()(1)()T C z z R z z z e -=--(D)210()10()(1)()T C z z R z z z e --=-- 答案:C8.二阶系统的极点分别为120.5,3s s =-=-,系统增益2,则其传递函数为()。
控制工程基础期末试题
控制工程基础期末试题(C)一、单项选择题(本大题共10小题,每小题2分,,共20分)1.如果系统中加入一个微分负反馈,将使系统的超调量σp( )A.增加B.减小C.不变D.不定2.运算放大器具有_____的优点。
( )A.输入阻抗高,输出阻抗低B.输入阻抗低,输出阻抗高C.输入阻抗高,输出阻抗高D.输入、输出阻抗都低3.在伯德图中反映系统抗高频干扰能力的是( )A.低频段B.中频段C.高频段D.无法反映4.设开环系统频率特性G(jω)= ,当ω=1rad/s时,其频率特性幅值M(1)=( )A. B.4 C. D.25.设开环传递函数G(s)H(s)= ,α>0,K>0,随着K增大,闭环系统( )A.相对稳定性变差,快速性不变B.相对稳定性变好,快速性不变C.相对稳定性不变,快速性变好D.相对稳定性变差,快速性变差6. 进行串联超前校正后,校正前的穿越频率ωc与校正后的穿越频率ω′c的关系,通常是( )A.ωc=ω′cB.ωc>ω′cC.ωc<ω′cD.ωc与ω′c无关7.比例环节的频率特性相位移θ(ω)=( )A.90°B.-90°C.0°D.-180°8.PI控制规律指的是( )A.比例、微分B.比例、积分C.积分、微分D.比例、积分、微分9.系统特征方程式的所有根均在根平面的左半部分是系统稳定的( )A.充分条件B.必要条件C.充分必要条件D.以上都不是10.随动系统中常用的输入信号是斜坡函数和( )A.阶跃函数B.脉冲函数C.正弦函数D.抛物线函数二、填空题(每小题2分,共20分)1.根据控制系统元件的特性,控制系统可分为______ 控制系统、______控制系统。
2.对于一个自动控制系统的性能要求可以概括为三个方面:稳定性、快速性和______。
3.信号流图中,节点可以把所有____的信号叠加,并把叠加后的信号传送到所有的____。
控制工程基础复习题库(有答案)
系统的传递函数在x的右半平面没有零点和极点
6.如何确定复平面上根轨迹的分离点?
需要解分离点方程;
需要确定分离角;
分离角与分支数有关
7.什么是系统的偏差信号?
输入信号与反馈信号之差
8.什么是传递函数?
9.解释根轨迹和常规根轨迹的含义。
10.根轨迹各分支的起点和终点在哪?
根轨迹关于实轴对称,分支数等于开环极点数,起点位系统的开环极点,终点为系统的开环零点、无穷远点
5、系统的稳态误差与输入信号的形式及_____________开环传递函数_____________________有关。
6. 如果系统受扰动后偏离了原工作状态,扰动消失后,系统能自动恢复到原来的工作状态,这样的系统是稳定系统。
7、I型系统 在单位阶跃输入下,稳态误差为_0__,在单位加速度输入下,稳态误差为__无穷__。
8、线性系统的频率响应是指系统在正弦信号作用下,系统的稳态输出。
9. 瞬态响应是系统受到外加作用激励后,从初始状态到稳定状态的响应过程。
10、频率响应是系统对___正弦输入信号_______稳态响应,频率特性包括__幅频特性和像形特性_______两种特性。
11、系统的性能指标按其类型可分为______瞬态_________、___稳态____________、______准确性__________。
A. 开环系统的输出对系统无控制作用,闭环系统的输出对系统有控制作用。
B. 开环系统的输入对系统无控制作用,闭环系统的输入对系统有控制作用。
C. 开环系统不一定有反馈回路,闭环系统有反馈回路。
D. 开环系统不一定有反馈回路,闭环系统也不一定有反馈回路。
13.某典型环节的传递函数为 ,则该环节为( )。
控制工程基础期末考试题及答案

控制工程基础期末考试题及答案一、选择题1.控制系统的基本组成是( A )A. 系统、信号、传感器、控制器和执行机构B. 环境、信号、系统、传感器、执行机构C. 反馈、信号、传感器、系统、执行机构D. 信号、输出、传感器、控制器和执行机构答案:A2.在压力调节器中,控制信号循环不完全系统中,有( D )A. 闭环和开环B. 直接作用和反馈作用C. 模拟和数字信号D. 传感器和执行器答案:D3.在控制系统中,控制参数是( B )A. 控制器和执行机构B. 执行机构的推动量C. 传感器和信号D. 控制环境答案:B4.下列项目中,可以作为控制信号传输的是( B )A. 指令B. 脉冲C. 开关信号D. 压力答案:B5.在控制系统中,调整器的作用是( D )A. 输出参考信号B. 调节控制环境C. 调节输入信号D. 改变执行器的位置答案:D二、填空题6.当变量的输入是有用的外界信号时,这种控制系统叫__外环控制系统___。
答案:外环7.控制系统可以根据__反馈信号__的不同,分为闭环控制系统和开环控制系统。
答案:反馈8.控制系统的__执行机构__是控制信号实际发挥作用的部件。
答案:执行机构9.在变径机构中,活塞杆或活塞上有__凸轮__,利用凸轮来传递位置信号或脉冲信号,以便控制活塞杆的运动方向。
答案:凸轮10.控制系统本身也可以分为__硬件系统和软件系统__两部分。
答案:硬件系统和软件系统三、论述题11.介绍闭环控制系统的原理答案:闭环控制系统是指根据反馈信号自动调整控制参数,达到控制目标的控制系统。
它利用闭环环路来完成反馈控制,也是当今控制系统中应用最为广泛的控制方式。
闭环控制系统的基本元件是反馈环路、传感器、控制器和执行器,它们形成一个典型的反馈环路。
该环路的结构中,传感器将变量的实际量转换成控制信号,反馈信号与设定的参数比较,然后经过控制器处理,把得到的结果转换成推动量,这种推动量是由一个执行器来完成的,会对调节对象产生影响,使变量恢复到参考值,闭环控制系统也可以改变控制器的输出,用以达到控制目标。
《控制工程基础》期末复习题及答案_81251553585744438

《控制工程基础》期末复习题一、选择题1、采用负反馈形式连接后,则()A、一定能使闭环系统稳定;B、系统动态性能一定会提高;C、一定能使干扰引起的误差逐渐减小,最后完全消除;D、需要调整系统的结构参数,才能改善系统性能。
2、下列哪种措施对提高系统的稳定性没有效果( )。
A、增加开环极点;B、在积分环节外加单位负反馈;C、增加开环零点;D、引入串联超前校正装置.3、系统特征方程为 ,则系统()A、稳定;B、单位阶跃响应曲线为单调指数上升;C、临界稳定;D、右半平面闭环极点数。
4、系统在作用下的稳态误差,说明( )A、型别;B、系统不稳定;C、输入幅值过大;D、闭环传递函数中有一个积分环节.5、对于以下情况应绘制0°根轨迹的是( )A、主反馈口符号为“—”;B、除外的其他参数变化时;C、非单位反馈系统;D、根轨迹方程(标准形式)为。
6、开环频域性能指标中的相角裕度对应时域性能指标() .A、超调B、稳态误差C、调整时间D、峰值时间7、已知开环幅频特性如图2所示,则图中不稳定的系统是( )。
系统①系统②系统③图2A、系统①B、系统②C、系统③D、都不稳定8、若某最小相位系统的相角裕度,则下列说法正确的是 ( ).A、不稳定;B、只有当幅值裕度时才稳定;C、稳定;D、不能判用相角裕度判断系统的稳定性。
9、若某串联校正装置的传递函数为,则该校正装置属于()。
A、超前校正B、滞后校正C、滞后—超前校正D、不能判断10、下列串联校正装置的传递函数中,能在处提供最大相位超前角的是:A、B、C、D、11、关于传递函数,错误的说法是()A 传递函数只适用于线性定常系统;B 传递函数不仅取决于系统的结构参数,给定输入和扰动对传递函数也有影响;C 传递函数一般是为复变量s的真分式;D 闭环传递函数的极点决定了系统的稳定性。
12、下列哪种措施对改善系统的精度没有效果()。
A、增加积分环节B、提高系统的开环增益KC、增加微分环节D、引入扰动补偿13、高阶系统的主导闭环极点越靠近虚轴,则系统的() 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《控制工程基础》期末复习题一、选择题1、采用负反馈形式连接后,则 ( )A 、一定能使闭环系统稳定;B 、系统动态性能一定会提高;C 、一定能使干扰引起的误差逐渐减小,最后完全消除;D 、需要调整系统的结构参数,才能改善系统性能。
2、下列哪种措施对提高系统的稳定性没有效果 ( )。
A 、增加开环极点; B 、在积分环节外加单位负反馈; C 、增加开环零点; D 、引入串联超前校正装置。
3、系统特征方程为 0632)(23=+++=s s s s D ,则系统 ( ) A 、稳定; B 、单位阶跃响应曲线为单调指数上升; C 、临界稳定; D 、右半平面闭环极点数2=Z 。
4、系统在2)(t t r =作用下的稳态误差∞=ss e ,说明 ( )A 、 型别2<v ;B 、系统不稳定;C 、 输入幅值过大;D 、闭环传递函数中有一个积分环节。
5、对于以下情况应绘制0°根轨迹的是( )A 、主反馈口符号为“-” ;B 、除r K 外的其他参数变化时;C 、非单位反馈系统;D 、根轨迹方程(标准形式)为1)()(+=s H s G 。
6、开环频域性能指标中的相角裕度γ对应时域性能指标( ) 。
A 、超调%σ B 、稳态误差ss e C 、调整时间s t D 、峰值时间p t7、已知开环幅频特性如图2所示, 则图中不稳定的系统是( )。
系统① 系统② 系统③图2A 、系统①B 、系统②C 、系统③D 、都不稳定8、若某最小相位系统的相角裕度0γ>,则下列说法正确的是 ( )。
A 、不稳定; B 、只有当幅值裕度1g k >时才稳定; C 、稳定; D 、不能判用相角裕度判断系统的稳定性。
9、若某串联校正装置的传递函数为1011001s s ++,则该校正装置属于( )。
A 、超前校正B 、滞后校正C 、滞后-超前校正D 、不能判断10、下列串联校正装置的传递函数中,能在1c ω=处提供最大相位超前角的是:A 、1011s s ++ B 、1010.11s s ++ C 、210.51s s ++ D 、0.11101s s ++ 11、关于传递函数,错误的说法是 ( ) A 传递函数只适用于线性定常系统; B 传递函数不仅取决于系统的结构参数,给定输入和扰动对传递函数也有影响;C 传递函数一般是为复变量s 的真分式;D 闭环传递函数的极点决定了系统的稳定性。
12、下列哪种措施对改善系统的精度没有效果 ( )。
A 、增加积分环节 B 、提高系统的开环增益K C 、增加微分环节 D 、引入扰动补偿13、高阶系统的主导闭环极点越靠近虚轴,则系统的 ( ) 。
A 、准确度越高 B 、准确度越低C 、响应速度越快D 、响应速度越慢14、已知系统的开环传递函数为50(21)(5)s s ++,则该系统的开环增益为( )。
A 、 50B 、25C 、10D 、5 15、若某系统的根轨迹有两个起点位于原点,则说明该系统( ) 。
A 、含两个理想微分环节 B 、含两个积分环节 C 、位置误差系数为0 D 、速度误差系数为016、开环频域性能指标中的相角裕度γ对应时域性能指标( ) 。
A 、超调%σ B 、稳态误差ss e C 、调整时间s t D 、峰值时间p t17、已知某些系统的开环传递函数如下,属于最小相位系统的是( ) A 、(2)(1)K s s s -+ B 、(1)(5K s s s +-+) C 、2(1)K s s s +- D 、(1)(2)K s s s --18、若系统增加合适的开环零点,则下列说法不正确的是 ( )。
A 、可改善系统的快速性及平稳性;B 、会增加系统的信噪比;C 、会使系统的根轨迹向s 平面的左方弯曲或移动;D 、可增加系统的稳定裕度。
19、开环对数幅频特性的低频段决定了系统的( )。
A 、稳态精度B 、稳定裕度C 、抗干扰性能D 、快速性 20、下列系统中属于不稳定的系统是( )。
A 、闭环极点为1,212s j =-±的系统B 、闭环特征方程为2210s s ++=的系统C 、阶跃响应为0.4()20(1)t c t e -=+的系统D 、脉冲响应为0.4()8t h t e =的系统31、关于线性系统稳态误差,正确的说法是:( ) A 、 一型系统在跟踪斜坡输入信号时无误差 ;B 、 稳态误差计算的通用公式是20()lim 1()()ss s s R s e G s H s →=+;C 、 增大系统开环增益K 可以减小稳态误差;D 、 增加积分环节可以消除稳态误差,而且不会影响系统稳定性。
32、适合应用传递函数描述的系统是 ( )。
A 、单输入,单输出的线性定常系统;B 、单输入,单输出的线性时变系统;C 、单输入,单输出的定常系统;D 、非线性系统。
33、若某负反馈控制系统的开环传递函数为5(1)s s +,则该系统的闭环特征方程为( )。
A 、(1)0s s +=B 、 (1)50s s ++=C 、(1)10s s ++=D 、与是否为单位反馈系统有关34、非单位负反馈系统,其前向通道传递函数为G(S),反馈通道传递函数为H(S),当输入信号为R(S),则从输入端定义的误差E(S)为 ( )A 、 ()()()E S R S G S =⋅B 、()()()()E S R S G S H S =⋅⋅C 、()()()()E S R S G S H S =⋅-D 、()()()()E S R S G S H S =- 35、已知下列负反馈系统的开环传递函数,应画零度根轨迹的是 ( )。
A 、 *(2)(1)K s s s -+B 、*(1)(5K s s s -+)C 、*2(31)K s s s +-D 、*(1)(2)K s s s --36、闭环系统的动态性能主要取决于开环对数幅频特性的:A 、低频段B 、开环增益C 、高频段D 、中频段 37、已知单位反馈系统的开环传递函数为2210(21)()(6100)s G s s s s +=++,当输入信号是2()22r t t t =++时,系统的稳态误差是( )A 、 0 ;B 、 ∞ ;C 、 10 ;D 、 20 38、关于系统零极点位置对系统性能的影响,下列观点中正确的是( )A 、 如果闭环极点全部位于S 左半平面,则系统一定是稳定的。
稳定性与闭环零点位置无关;B 、 如果闭环系统无零点,且闭环极点均为负实数极点,则时间响应一定是衰减振荡的;C 、 超调量仅取决于闭环复数主导极点的衰减率,与其它零极点位置无关;D 、 如果系统有开环极点处于S 右半平面,则系统不稳定。
41、关于奈氏判据及其辅助函数 F(s)= 1 + G(s)H(s),错误的说法是 ( ) A 、 F(s)的零点就是开环传递函数的极点 B 、 F(s)的极点就是开环传递函数的极点 C 、 F(s)的零点数与极点数相同D 、 F(s)的零点就是闭环传递函数的极点 42、已知负反馈系统的开环传递函数为221()6100s G s s s +=++,则该系统的闭环特征方程为 ( )。
A 、261000s s ++= B 、 2(6100)(21)0s s s ++++=C 、2610010s s +++= D 、与是否为单位反馈系统有关43、一阶系统的闭环极点越靠近S 平面原点,则 ( ) 。
A 、准确度越高B 、准确度越低C 、响应速度越快D 、响应速度越慢44、已知系统的开环传递函数为100(0.11)(5)s s ++,则该系统的开环增益为 ( )。
A 、 100B 、1000C 、20D 、不能确定 45、若两个系统的根轨迹相同,则有相同的:A 、闭环零点和极点B 、开环零点C 、闭环极点D 、阶跃响应 46、下列串联校正装置的传递函数中,能在1c ω=处提供最大相位超前角的是 ( )。
A 、1011s s ++ B 、1010.11s s ++ C 、210.51s s ++ D 、0.11101s s ++ 47、关于P I 控制器作用,下列观点正确的有( )A 、 可使系统开环传函的型别提高,消除或减小稳态误差;B 、 积分部分主要是用来改善系统动态性能的;C 、 比例系数无论正负、大小如何变化,都不会影响系统稳定性;D 、 只要应用P I 控制规律,系统的稳态误差就为零。
48、关于线性系统稳定性的判定,下列观点正确的是 ( )。
A 、 线性系统稳定的充分必要条件是:系统闭环特征方程的各项系数都为正数;B 、 无论是开环极点或是闭环极点处于右半S 平面,系统不稳定;C 、 如果系统闭环系统特征方程某项系数为负数,系统不稳定;D 、 当系统的相角裕度大于零,幅值裕度大于1时,系统不稳定。
49、关于系统频域校正,下列观点错误的是( ) A 、 一个设计良好的系统,相角裕度应为45度左右;B 、 开环频率特性,在中频段对数幅频特性斜率应为20/dB dec -;C 、 低频段,系统的开环增益主要由系统动态性能要求决定;D 、 利用超前网络进行串联校正,是利用超前网络的相角超前特性。
50、已知单位反馈系统的开环传递函数为2210(21)()(6100)s G s s s s +=++,当输入信号是2()22r t t t =++时,系统的稳态误差是( )A 、 0B 、 ∞C 、 10D 、 20二、(8分)试建立如图3所示电路的动态微分方程,并求传递函数。
图3三、(共20分)系统结构图如图4所示:1、写出闭环传递函数()()()C s s R s Φ=表达式;(4分) 图42、要使系统满足条件:707.0=ξ,2=n ω,试确定相应的参数K 和β;(4分)3、求此时系统的动态性能指标s t ,00σ;(4分)4、t t r 2)(=时,求系统由()r t 产生的稳态误差ss e ;(4分)5、确定)(s G n ,使干扰)(t n 对系统输出)(t c 无影响。
(4分)四、(共22分)某最小相位系统的开环对数幅频特性曲线0()L ω如图5所示:1、写出该系统的开环传递函数)(0s G ;(8分)2、写出该系统的开环频率特性、开环幅频特性及开环相频特性。
(3分)3、求系统的相角裕度γ。
(7分)4、若系统的稳定裕度不够大,可以采用什么措施提高系统的稳定裕度(4分)五、(8分)写出下图所示系统的传递函数()()C s R s (结构图化简,梅逊公式均可)。
六、(共20分)设系统闭环传递函数 22()1()()21C s s R s T s Ts ξΦ==++,试求:1、0.2ξ=;s T 08.0=; 0.8ξ=;s T 08.0=时单位阶跃响应的超调量%σ、调节时间s t 及峰值时间p t 。