立体车库外文翻译与原文.pptx
立体车库外文翻译

Numerical control technology and equipment trend of developmentThe equipment industry technical level and the modernized degree were deciding the entire national economy level and the modernized degree, the numerical control technology and the equipment are the development emerging high technology and new technology industry and the state-of-art industr y (for example defense industry industries and so on information technology and industry, biological technology and industry, aviation, astronautics) enables the technology and the most basic equipmen t. Marx had said “each kind of economical time difference, does not lie in produces any, but how l ies in produces, with any means of labor production”. The technique of manufacture and the equip ment is the humanity produces active the most basic producer goods, but the numerical control tech nology also is advanced now the technique of manufacture and the equipment most core technology. Now the various countries manufacturing industry widely uses the numerical control technology, sh arpens the manufacturing capacity and the level, enhances to the dynamic changeable market adaptiv eness and competitive ability. In addition in the world various industries developed country also list s as the national strategic resources the numerical control technology and the numerical control equi pment, not only takes the significant measure to develop own numerical control technology and the industry, moreover implements the blockade and the limit policy in “precise and advanced” the n u merical control key technologies and the equipment aspect to our country. In brief, develops vigorou sly take the numerical control technology has become the world each developed country acceleration economy development as the core advanced technique of manufacture, enhances the comprehensive national strength and the national status important way. The numerical control technology is carries on the control with the numerical information to the mechanical movement and the work process t he technology, the numerical control equipment is take the numerical control technology as represent ative's new technology the integration of machinery product which forms to the traditional manufact ure industry and the emerging manufacturing industry seepage, namely so-called digitized equipment, its technical scope cover very many domains: (1) machine manufacture technology; (2) informationprocessing, processing, transmission technology; (3) automatic control technology; (4) servo actuates the technology; (5) sensor technology; (6) software technology and so on. 1 numerical control tech nology trend of development Not only the numerical control technology application has brought the revolutionary change for the traditional manufacturing industry, causes the manufacturing industry to become the industrialization the symbol, moreover along with numerical control technology unceasi ng development and application domain expansion, he to national economy and the people's liveliho od some important professions (IT, automobile, light industry, medical service and so on) developme nt more and more vital role, because these professions must equip the digitization already was the modern development major tendency. The numerical control technology and the equipment developm ent tendency looked from the present world that, its main research hotspot has following several aspect [1~4]. 1.1 high speed, high precision work technology and equipm ent new tendency The efficiency, the quality are the advanced technique of manufacture main bodie s. High speed, the high precision work technology may enhance the efficiency enormously, enhances the product the quality and the scale, reduces the production cycle and sharpens the market compe tition ability. Lists as one of 5 great modern techniques of manufacture for this Japan Tip Technolo gy Research board it, the international production project learns (CIRP) its determination is one of 21st century central research directions. In the passenger vehicle industry domain, yearly produces 3 00,000 production metres was 40/s,moreover the multi-variety processing is one of key questions which the passenger vehicle equipment must solve; In the aviation and the astronavigation industry domain, its processing spare part many for the thin wall and the thin muscle, the rigidity is very b ad, material for aluminum or aluminum alloy, only then in the high cutting speed and the cutting f orce very small situation, can to these muscles, the wall carry on the processing. Recently uses the large-scale overall aluminum alloy semifin ished materials “pull out spatially” the method to make t he wing, the fuselage and so on the large-scale components substitutes many components through th e multitudinous rivets, the bolt and other joint way assembling, causes the component the intensity,the rigidity and the reliability obtains the enhancement. These all to processed the equipment to pro pose high speed, Gao Jing and the high flexible request. Unfolds from EMO2001 meets the situatio n to look that, processes the center feed rate to be possible high speed to reach 80m/min, even hig her, the aerial transport stroke speed may reach 100m/About min. At present in the world many aut omotive factories, including our country's Shanghai General Motors, already used by the high speed processing center composition production line part substitution aggregate machine-tool. American CI NCINNATI Corporation's HyperMach engine bed feed rate reaches 60m/most greatlymin, fast is 100 m/min, the acceleration reaches 2g, the main axle rotational speed has reached 60 000r/min. Process es a thin wall airplane part, only uses 30min, but the same components need 3h in the common hi gh speed milling machine processing, needs 8h in the plain milling machine processing; The Germa n DMG Corporation's double main axle lathe main axle speed and the acceleration respectively reac h 12*! 000r/mm 和1g。
基于欧姆龙可编程序控制器的6层立体车库设计外文文献翻译、中英文翻译、外文翻译

英文原文THE 6 LAYERS STEREO GARAGE DESIGN BASED ON OMRON PLCZhuoran Zhang Department of Electrical & Engineering Wuhan Polytechnic University Wuhan, China E-mail: Harry zzr@Zhe Mao, Hailing Wan Department of Electrical & Engineering Wuhan Polytechnic University Wuhan, China E-mail:maozhe998@ Abstract—with the development of the modern society, the number of the vehicles in these cities has been increasing with an exponential speed; especially the private cars, putting a great pressure on urban transportation and parking slot. This article is mainly concerned about the entire structure, running procedure and electrical system design including hardware and program design ideas for lifting-traversing stereo garage, which will not only shorten the developing period but also orient parking to centralization and automation direction; Owning some reference value.Keywords- Stereo Garage, Omron PLC, DesignInsufficient parking slots is resulted from the development of the cities, economy and transportation of the cities, the traditional garages are always making the use of the nature vacancy, in a community, the ratio between parking slots and residents is approximately 1:1, one parking slot for a family at least, in order to solve the contradiction that the parking slots using precious commercial land, the stereo mechanical garages with the advantage of the average parking slot takes of less area have been gradually in front of us. Compared with the traditional underground parking garage, the stereo garages have more advantages. First of all, the stereo garages can save more area. The traditional ways must be amassed driving path for vehicles, averagely, a car will take up 40m2 If we take multi-layers garage (6 layers) in to consideration, it is possible for 13 cars to park in the area of 50m2, which will save lots of land resources and land construction expenditure. Meanwhile, the stereo garage could guarantee the safety of the people and their cars. If there is anybody in the garage or the cars are not fully stopped, the system controlled by electrical equipment will not run either. It means that, in the scale of the management, the mechanical garage could separate the people and vehicles, which makes it more systematically. Especially for underground garages, install this kind of garage will save a large area of illumination system, so it is also emerge conservation and environment protection.Ⅰ.THE CLASSIFICATION AND IMPLEMENT BACKDROP OF THE STEREO GARAGEA.THE CLASSIFICATION OF THE STEREO GARAGEAccording to the present development of the stereo garage, the stereo garage is including lifting-traversing, roadway stacking, vertical lifting, vertical circulating, circle level circulation; The concept of the stereo garage is all from automatic logistic material transmitting system. [3]The purpose of the stereo garage is to solve the parking problem in developed cities, that is make use of limited area to park more vehicles so as to save land resources of the cities and manage thestatic transportation of the urban. This article gives out a way to design lifting-traversing stereo garage based on Omron PLC CP1H, which could extend to solve relevant projects.B. A BRIEF INTRODUCTION TO LIFTING-TRAVERSING STEREO GARAGE.The modularization concept is imported in lifting-traversing stereo garage. It can be designed into two to five layers or half underground type, the number of the slot is from tens to hundreds. This kind of garage is suitable for both above ground and underground, the characteristics could be generalized as less occupation of land, simple structure, flexible configuration, lower cost in construction, decoration and fire protection and short period of construction; Safe and convenient for saving and taking cars; Smoothly operation, lower noise during running. [4]It is also appropriate for commercial, bureau and residential use. The safety equipment mainly is photoelectrical sensors, limiting displacement protector and emergency switch.C. THE ENTIRE FRAME OF THE SYSTEMAs the fig. l representing, besides the central controller PLC, the stereo garage system could be divided into three sections: I. Mechanical System; It includes column, beam, carrying board, vehicle frame, hooks and etc. II. Electrical System; this section is the core of this article, which controls the whole system to operate. III. Touching Panel; it is the port from which operators and the system exchanging messages, operators could not only operate the system, but also in the situation of the malfunction, it could let operator enter the manual or debugging mode.Figure 1. The structure of the system Figure 2. Touch Screen (Auto running and Manual) • THE MAIN HARDWARE OF THE SYSTEMWe mainly use the Omron PLC CPH1, on considering the control requirement and the cost, we adopting CP1HX40DR-A PLC, the programming ways are ladder diagram or ST instruction list. The instruction length is 1 to 7 steps per instruction, each I/O relays has 1600 ports, USB 1.1 for communication.The display part, we import screen of WEINVIEW MT6056i series, the screen material is TFT, 5.6 inches, and the resolution is 320x234, with USB2.0 port supporting downloading. The frequency of the CPU is 400 MHz, 128RAM.D.THE SYSTEM STR UCTURE AND FUNCTIONSThe mechanical parts cooperating with electrical system are carrying board, hooks and chains. There are 6 slots on each layer besides 7 slots on the top layer, totally 37 slots, the purpose for one slot empty on each layer is that making enough space for carrying board to move. The carrying boards of the first floor only design to traverse, also the top floor carrying boards are only supposed to lift. The other carrying boards among these floors are designed to life and traverse. In this way, this system could achieve the saving and taking from any slots among these 6 layers.In addition, this system has a touch screen system, which switches between auto run andmanual debugging mode. Under the auto run mode, it could select a certain slot to accomplish saving and taking behavior, at the same time, monitoring the operation of the system. (Green words "System Running" in auto mode without malfunction). When failure occurs, the system seized and on screen flashing yellow failure code with red backdrop, with the help of the failure code, the professional operator could recognize and eliminate the failures promptly and accurately. On considering more authorities are given in manual debugging mode, to preclude unprofessional persons enter the mode by chance, before enter the mode, there is a cipher verification, in which the sequence could be set by ourselves. This would protect the system from potential dangers.Figure 2 is the graph of system auto running, manual and debugging.Ⅱ. THE COMPOSURE OF THE ELECTRICAL SYSTEMA. STRONG ELECTRICITY SYSTEMThe strong power system includes power supply, protection and driving mechanism, here is electronic motors. Installing XJ3-D on the forepart of the power supply wire, which is used to protect phase sequence of the three-phase voltage, so that guarantee the right rotation of the motors. Moreover, the motors on some layers use the same three-phase voltage.B.THE SET OF THE MOTORSThere are 6 traversing motors on the first layer, 6 traversing motors for 2 to 5 layers each, and so it is with lifting motors for 2 to 5 layers. The top layers have only 7 lifting motors. After setting the motors, mark every motor. For example, the motor driving the third slot of the second layer, we mark it with "23", the relay before the motor are named KM23. Here series connect all the motors' thermal protection, any motor's problem will stop the system. In this way, it has no influence on the stability of the system, but lowers the cost. At the same time, make it easier to find the problems. (What we need to do is press the thermal protection switch one by one).C .WEAK POWER SYSTEMThe weak power system is also the control system, which are mainly the PLC mode and its 5 extended modules, also the sensors. As the figure below, on the right is the input part, DC 24V, on the left, is the output section, AC 220V, to connect with contactors and drive them. These device's functions have close relationships with the entire system's control requirements. On the above of the graph, the protection equipment are emergency switch, installed beside the touching panel, emergency only, trigger it, the system stops; Front and back photoelectrical sensors, which are used to detect people or unidentified objects breaking into the system, if this happens, the system would stop then response with photoelectrical failure, the goal is to protect the people and the vehicles. The phase sequence protection has been illustrated before; Over current protection normally activated under the motor stuck; All the margin switches series connected, cult the main power when any carrying board exceed the limiting position.Limit switches including up ones and down ones or left and right limit switches. In order to achieve the controlling requirements, the level limit switches are installed on the both side of the each slot frame, while the vertical limit switches are installed on the chain which attached to the motor. It is necessary to point out that the first layer only installed down and left right limit switches, the top layer only installed up switches these switches could sense the position of thecarrying boards, helping to finish the lifting and traversing control; Hook position sensors is to fix the vehicles and sense the slot empty or not.The output points"00 04 05 06 07" are to select different phase for each layer, so control the motors' rotation ways.Figure 3. PLC Modules (Segment)There are other 4 extended modules, which only give more I/O ports to the system, similar to this main part.Ⅲ. OPERATION PROCEDUREA. TAKING PROCEDUREAs far as the first layer concerned, it is only designed to traverse, so as to make space to upper layer's carrying boards to move downward. So do the other layers, which are designed to traverse. When traversing meet the requirements, lifting mechanism will run to put the carrying board down, finishing the saving and taking procedure. During the procedure the photoelectrical sensors are open and will behave as fore part has explained. In figure 2A, is the taking condition, at this time "Loading" will flash until the taking procedure finishes.When we enter "51", the system will distinguish whether the operation is a taking or a saving according to the hook of the 51 slot. Then prints the message responded to the state of the hook on the screen, the operator could confirm the operation or cancel it. On confirming, the 51 carrying board will wait for its downward boards to finish the traversing move then moving down. Inaddition, a timer is added to this control module in order to preclude level limit switches malfunction, resulting into the traversing move time up. If the time for traversing move exceeds the set time, the system will warn the operator "traversing move time up" which displays on the screen, the operator could check out the failure. The up limit switches are used to sense whether the carrying boards are stopped at their routine slots, which the level switches can't finish. Maybe one carrying board stuck between two layers. Only do all the upper layers' carrying boards stop at their routine slots, the selected carrying board's lifting move is activated. A timer is also set into the lifting control, with the same function as traversing timer. The elevator carries the vehicle down to the ground, release the hook, now the photoelectrical signal shut down, and waiting for the owners to take their vehicle. On driving away the vehicle and operator's confirming the photoelectrical signal resumes, the carrying board back to its slot from the down way.Figure 4. The flowchart of the taking and saving procedureB. SAVING PROCEDUREThe saving process is based on taking procedure, so they are familiar; the only difference is the hook move.Ⅳ. SOFTWARE PROGRAMMING AND PROGRAMMING ENVIRONMENTA.SOFTWARE PROGRAMMING ENVIRONMENT AND ITS LANGUAGEIn this system, we choose Omron CX-ONE 3.0 to program the PLC. The language for programming is classic ladder diagram. On considering the stereo garages are installed in different condition and requirement of different users, the scale of the stereo garages should be flexible, for example different layers or slots. In order to meet the different scales requirements, the program is modularized, only need to change the I/O ports, the logical relations in the ladder diagram are fixed. In this way, it is not only with highly compatibility but also shortens the period to develop relevant designs and make it easier to debugging and repair.B.MODULARIZED PROGRAMConditional jumps are widely used in the programming; the entire program consists of different modules, on certain conditions, the program jumps.As illustrated before, there are only two movements for a carrying board, lifting or traversing, beside the boards of first and top layers. The condition for the fifth could traverse is all the upper layers slots' up limiting switches closed. Then "Traverse OK" is activated, and then the program will make analysis of the operation until meet set conditions, the program jumps. For the lifting movements are always with the downward movements, so program the downward standards, the system will run. The entire program is programmed with this method, above the passage, is only a traversing OK and vertical move OK module. Similarly, modules of a fixed slot, for example slot "21". "21 Traversing Move", "21 Vertical Move"; for whole system, "Emergency Stop and Protection", "Button Select", "System Monitor" and "Debugging" modules, which cooperate with each other to accomplish the control and monitor.Figure 5. Monitoring and Display module (Segment)Fig. 5 is the segment program of the monitoring module, all the motors' protection series connected, so are the phase sequence protection and margin switches. Any of them change; PLC will transfer messages to the screen, which displays. Meanwhile, cults off the main KM, the system stops.Ⅵ.A BRIEF SUMMARYThis paper introduces lift shifting type six floors of three-dimensional garage design methodbased on Omron CP1HX40DR-A controller, completing the requirements of three-dimensional garage for city vehicle management toward the direction of automation and centralization. This design can be used to restore occupied pavement, reduce preempting, and ensure safety, in addition that it could reduce traffic congestion time, reducing the injury. On this basis, the problem has been thoroughly eliminated, including various vehicles disorderly stopping and parting in disorder, and the appearance of parking places with dirty, disorderly and poor, thus protecting vehicles away from lost, being damaged and stolen. Finally, the road is giving back to the vehicles and pedestrians, the lawn to the green space, the environment of the neat civilization life to the modern metropolis.The development cycle has been greatly shortened, based on the design about three-dimensional garage design of PLC controller. This is also a kind of inevitable of the electrification, digital and automation advancement. The thoughts and methods of this design can be applied to other scale garage and relevant problems of design.REFERENCES[1] [1] Huo Gang. Application and programmer of the CP1HPLC. China Machine Press [M], 2009.1[2] [2] Omron Power program. Omron Corporation (China), 2008[3] [3] BoSen Ren.General situation of Chinese mechanical parking equipment. Celebrated manufacturers of parking equipment and peripherals directory [J] :PP5-7[4] [4] Lekang Yu Dongxiao Zuo.The development of mechanical parking. [J] Technology and management of construction machinery. 1999 1:PP 30-32[5] [5] Fuen Zhang … Younai Wu.Principle … design … set up and maintenance of AC variable speed elevator. [M] China Machine Press 1999中文译文基于欧姆龙可编程序控制器的6层立体车库设计Zhuoran Zhang 电气工程武汉理工大学武汉,中国电子邮件:Harry zzr@Zhe Mao, Hailing Wan 电气工程武汉理工大学武汉,中国电子邮件:maozhe998@摘要:随着现代社会的快速发展,许多城市的车辆数量正在一直以指数的速度快速增加,特别是私家车。
立体停车库国外文献

Multi-lifting and transferring parking control systemAbstract: Describes a multi-storey parking lifting and transferring the operation principle and structure characteristics, describes the composition of the control system, PLC control of the implementation and control software design, implementation of the automatic parking controlCurrent common mechanical parking there lifting and transferring, vertical circular, multi-layer circular, horizontal circular, flat mobile, laneway, vertical lifting type and 8 simple movements, lifting and transferring them Class of its simple structure, easy operation, safe and reliable, and low cost advantages of market share in the domestic garage 83% market share. Programmable Logic Controller (PLC) set of computer technology, automation technology, communication technology as a whole, reliability, cost-effective, compact design, good scalability, easy to operate, so the automatic parking system, usually as an electronic control core. For larger systems, can also use the industrial field bus (Profibus or Devicenet) constitute the PLC network, and automatic control. Structural features: pan bottom only, top only lift, but also lifting the middle layer can shift. In addition to the top, the middle layer and the bottom have to be an empty parking spaces reserved for use in and out of vehicle movements. When the bottom and out of car parking spaces, no other carrier can move directly out of car; the middle layer, top and out of car, one should first determine whether the location corresponding to the bottom of the empty, not empty pan to make the appropriate treatment, until the bottom can be conducted for the empty car moves down and out, up and out of cars and then back to the original position. General principles of motion are: lifting reset, translation is not reset. Figure 1 is a 3x3 sport lifting and transferring parking schematic. Underground layout, semi-ground structure of semi-underground garage layout is similar.1 garage operation principle of lifting and transferringLifting and transferring parking spaces for 2-dimensional matrix structure can be designed for multi-layer, multi-column. Closed chain devices and due to time constraints and out of cars, usually 2 to 4 layers (the state of up to 4 layers) to 2, 3 layer in the majority, according to the number of parking garage the size of the decision. Garage located on the ground, can also be located in the ground, or half of the set in half in the ground floor. The specifications of steel frames at a certain combination of sub-grid unit can be vertically extended, sub-centralized control, but also horizontally parallel, sub-row alone control. Combination of different forms of the garage layout can be adapted to the needs of different site conditions, configuration is very flexible. Is a typical garage floor 3x3 lifting and transferring to illustrate the operation principle of the garage.Lifting and transferring parking generated by the shift tray vertical channel, to achieve high-level access to vehicles, parking lift, all the logical process control by PLC. Layout of the lifting and above ground parking structure features: the bottom can only pan, lifting the top only, but also lifting the middlelayer can shift. In addition to the top, the middle layer and the bottom must be an empty parking spaces reserved for use in and out of vehicle movements. When the bottom and out of car parking spaces, no other carrier can move directly out of car; the middle layer, top and out of car, one should first determine whether the location corresponding to the bottom of the empty, not empty pan to make the appropriate treatment, until the bottom can be conducted for the empty car moves down and out, up and out of cars and then back to the original position. General principles of motion are: lifting reset, translation is not reset.2 parking control system design2.1 The composition of the control systemParking control system with a computer monitoring system and lower machine PLC control system, the system block diagram in Figure 2. Monitoring system consists of "superior machine or network bus (optional) + PC + PLC ten on-site operator" constitutes, to the core PC, equipped with printers, audio equipment, cash registers, monitors and so on. Higher bus control machine or network, the operation, touch screen, IC card, magnetic card machines are optional parts for the further development of content, according to the actual situation in the garage size and reasonable choice. For example, modular garage more than 3x3, we can use a garage of a PLC control unit PLC together constitute more than the structure of local area network. If the size of the garage is large enough, you can also consider the equipment operation, touch screen and the IC card, magnetic card machine intelligent automatic control.Garage is divided into three control - manual, semi-automatic and fully automatic. Manual operator in the field by hand to jog each pallet control; semi-automatic PLC control panel for operating the buttons automatically by the PLC logic control; automatic access to the command given by the computer implementation of the PLC (with the requirements of "operator"). Mainly used for maintenance of manually debugging or exception handling, is the highest priority; semi-automatic or automatic mode for normal processing and out of vehicles, including semi-automatic mode takes precedence over automatic. In the case of the computer offline, PLC control panel to complete all the access to truck operators.2.2 PLC control system designPLC control system is the core of the garage, its operation can be divided into three categories: (1) diagnosis and treatment based operation; (2) Contact data on the state vo-site operation; (3) the implementation of programs and services and external users equipment, command operations. When the access operation, PLC receive and analyze the operator in the control panel button (or PC) input instructions, the IPC to make reasonable arrangements: to determine the status of detection devices, mechanical drive part of the garage read the information, feedback to the implementation of components, drag parking board to achieve its position of movement, access to complete vehicle operation and signal display (LED). The action area with light, power detectionand multiple safety systems to prevent exceptions from happening. By photoelectric detection, hardware and software signal interlocking, limit, anti-fall protection, overload protection device to ensure the security of the system running smoothly.The completion of the main PLC system tray, pallet location and operating status of the detection and access to vehicle operation. With a variety of optical switches, limit switch detection position of the state, with the contactor, relay control drag from the motor stops.That control the operation of the parking spaces sliding down a small motor and large motor, so that they achieve reversing at different times. And lift the upper layers of the sliding action and the following actions must be interlocked, that is, when the upper berth down, the following layers of berths can not be moved, and vice versa. And the upper berth only one berth for each lifting movement up and down.In order to ensure reliable and secure access to vehicles, the system should be precise positioning. Limit switch can be set to ensure that the pallet and the pallet level to the desired location to move up or down to the exact location, but to strictly limit switch interlock logic. For example, 1, 2 level limit switch in the static case, only one is broken, if the switch is closed more than 2 means that the pallet is not in place. Still in the garage, all should be fixed pallet off the hook signal (negative logic), limit switches off Layer 2 and 3 layer limit position switch is closed.To ensure the operation of loading the safety board, the insurance must be taken to drive the design and safety self-locking linked insurance design: chain drive with brake motor, no matter what happens, are in a state of self-protection; control security linked to the solenoid action must have a feedback signal, can be used to indicate whether the link has hung the tray. Photoelectric switches arranged in different positions have different functions: the bottom of the tray installed around two sides of the photoelectric switch detects whether the tray in place on the car park; placed in the tray on the diagonal of the photoelectric switch detects whether the car on a pallet; installed in parking the vehicle population of about 2 at the side of the optical switch can also be used to detect movement and parking spaces outside the errors that occur when moving abnormal situation. In case the vehicle is not well arranged, the action area are people or things, like running a car entered in unexpected circumstances such as optical switches light is cover, will give a level change in PLC signal, thus changing the PLC's input, buzzer long tone and the alarm device does not run or stop running.Also used in the garage of some sensors, smoke temperature sensor to detect the alarm off Sheng Songsheng or broken chain displacement sensors, and warning devices, emergency stop switch, the manual button, reset switch.2.3 PLC control system programming(1) control program flow chartThe vehicle control system access only to the upper (2,3, 4-layer) parkingspaces, and for the lower parking spaces, access can be opened directly into the car. Control software using the ladder language. Program flow shown in Figure 4, a description is to rely on the tray with rope or chain hanging points on the tray hanging bracket, in the stationary state, fall protection (security) hooks to hook the tray, the tray to fall, must be first increased to the highest point, remove the safety hook can be decreased.And out of different layers in the design process was used for the car, "convergence of parallel branch and" technique, the so-called parallel branches of each branch of the process refers to the simultaneous implementation of all actions to be after the end of the process, according to the corresponding execution condition, the convergence state action. Ie If you select Layer 3 tray out of vehicles, can make the floor while the second floor pan (left or right), so the system can automatically control the sequence of movement between processing equipment interlock or double output, and test control system convenient operation and fault checking can save a lot of time and improve efficiency.(2) control program optimizationBecause the movements of the upper tray to empty parking spaces to the lower before it can be to 3 floors above ground parking spaces movement, for example, a layer of empty parking spaces there are N kinds of positions, 2 layer tray down the movements of a related species N2, 3 tier tray The movement pattern may have N3 species, along with parking spaces and increase, the sharp expansion of the program will, therefore, how to find the easy way to make the program will be optimized programming of the system difficult. To layer 2, for example, stored in the variable knife overcast layer 2 needs to access the parking spaces, 1 of a N, such as the upper X (1 ≤ X ≤ N) No parking access, then Dm = X; in Dn in No storage of the lower air spaces, such as parking space number Y, then Dn = Y; making access to the vehicles, the Dm and Dn values in comparison, the result is zero, the upper spaces of the tray can move down; If the result is greater than zero, then the first empty parking spaces on the right to move the first one pallet space on the left, then repeat the process until the empty parking spaces in the upper below the required access, the parking spaces on the upper tray to the lifting movement . Process of optimizing the structure shown in Figure 5.3 access layer and 4 layers approach the car and 2 layers similar.(3) modular programmingPLC programming control program is modular forms, parking only during the operation of subroutine modules, which greatly reduces the complexity of the program to facilitate the process of change, and the expansion of parking spaces provided for the convenience. The entire process including the main program module, manual key subroutine modules, emergency stop button subroutine modules, initialization program modules, program modules to access the assignment number of parking spaces, parking space number and mobile number of parking spaces assigned program modules, programmodules tray translational motion , photoelectric switch subroutine modules, pallet lifting exercise program modules and the fault alarm subroutine modules.(4) software design in the treatment of several key issuesProgram with the state components, timers, and data memory are used with power-down protection components, power down when the system components to maintain the status before power off to save the site information, to be completed after power is interrupted to the action; when Accident occurs, press the emergency stop button to abort the operation of the system and save the scene breakpoint information; when there is an electrical or mechanical failure, such as motor overload, overheating the automatic stay system operation, concurrent sound and light alarm, and the system transferred Manually for troubleshooting.3 ConclusionLifting and transferring parking control system using PLC control, so that the whole control system reliability greatly improved, especially when the series more parking spaces, they can realize the automatic allocation of parking spaces to meet the garage control functions and performance requirements, complete achieve automatic control and out of the car. Design optimization software, the expansion makes the system more convenient parking spaces; the same time, the software design uses a "parallel branching and merging" skills, greatly reducing the time and out of cars and improve work efficiency. If the second development, increase communication module can be achieved only with the host computer communication, modern management by computer.。
停车场设计外文翻译整理版

Parking Structures Functional DesignGreg ForceParking Structures:Recommended Practice for Design and Construction, Chapter 2, Parking Structures Functional Design. The United States of America:PCI committee on parking structures. Page 1~6.停车场结构功能设计格雷格力停车场结构的设计和施工建议做法,第2章,停车场结构功能设计。
美国:停车场结构PCI委员会。
1~6页。
2 停车场功能设计2.1 介绍本章概述了多层停车场的许多非结构性方面的设计。
停车场对于车辆的行驶、存取和行人的出行来说是种独特的交通设施,这种特性在车辆与行人的交流发生在相对密封的停车空间里时显得尤为突出。
由于这种独特性,停车设计专业方面的相关咨询已不断发展。
对于停车场细节的完整性以及工程的完成质量,项目所有人或开发商能留住一个合格的停车场顾问是非常重要的。
功能设计包括车辆和行人流通的开发以及停车位的布局。
这其中也包含了操作的和安全功能的设计。
对于自助型的停车场功能设计包括:停车场类型循环系统安全防护街道出入口设计车位配置照明收费控制/操作系统行人流通图形与标牌2.1.1停车场类型2.1.1.1操作类型两种普遍的停车场包括服务型和自助型。
在服务型停车场里,车主将车辆停放在入口处,由服务人员泊车。
当车主返回取车时,服务人员检索找到车辆并驾驶到出口处交给车主。
服务型停车场通常凭借堆叠停放来最大化停车数量(图2-1)。
这种停车场通常位于地价高昂的大城市。
如今,在北美最常见的是自助型停车场,车主自行存取车辆(图2-2)。
本章只讨论自助型停车场的功能设计方法。
2.1.1.2建筑规范类型建筑模型规范通常将停车场分为两类:开放式停车场和停车库。
智能停车场中英文对照外文翻译文献
智能停车场中英文对照外文翻译文献(文档含英文原文和中文翻译)智能停车场最近几年来汽车的动态平衡与静态管理已成为许多专家学者重点研究的新课题。
智能停车场系统为了保证车辆安全和交通方便,迫切需要采用自动化程度高、方便快捷的停车场自动管理系统,提高停车场管理水平。
现阶段的目标就是要提供满足人们工作、生活、娱乐环境更科学、规范、有效快捷、安全、方便的智能停车场自动管理系统。
停车场管理系统正在向大型化、复杂化、集成化和高科技化方向发展,智能停车场系统已经被纳入智能建筑的一个重要子系统,并且正与智能建筑的其它子系统进一步高度集成。
智能停车场管理系统采用先进技术和高度自动化的机电设备,将机械、电子计算机和自控设备以及智能IC卡技术有机地结合起来,通过电脑管理可实现车辆出入管理、自动存储数据等功能,实现脱机运行并提供—种高效管理服务的系统。
新型的智能停车场将生活理念和建筑艺术、信息技术、计算机电子技术等现代高科技完美结合,提供的是一种操作简单、使用方便、功能先进的人性化系统。
它依靠高科技,以人为本,采用图形人机界面操作方式,提供一种更加安全、舒适、方便、快捷和开放的智能化、信息化生活空间,促进了人文环境的健康发展。
1 目前国内外停车场主要有以下几种类型1.1 机械式停车场机械式停车场是国内停车场主要的一种,机械式停车场是指停车场完全由机械停车设备如曳引驱动机、导向轮、载车板、横移装置、控制柜、召唤操作盘、升降回转装置、搬运器等构成。
分为升降横移类、垂直循环类、水平循环类、多层循环类、平面移动类、垂直升降类、简单升降类等类型。
因其停车方式多样独特,具有很强的应用性。
它的主要优点有占地面积小,选型多样、可具体结合场地特点设计,也可与其他方式相结合来实施,自动化程度高,操作使用方便,管理和维护也较为容易,具有定量存车的特点。
1.2 平面停车场系统智能停车场系统平面停车场系统因其主要采取感应式IC卡读卡方式,所以也叫感应式停车场系统。
立体仓库中英文对照外文翻译文献
立体仓库中英文对照外文翻译文献(文档含英文原文和中文翻译)由一个单一的存储/检索机服务的多巷道自动化立体仓库存在的拣选分拣问题摘要随着现代化科技的发展,仓库式存储系统在设计与运行方面出现了巨大的改革。
自动化立体仓库(AS / RS)嵌入计算机驱动正变得越来越普遍。
由于AS / RS 使用的增加对计算机控制的需要与支持也在提高。
这项研究解决了在多巷道立体仓库的拣选问题,在这种存储/检索(S / R)操作中,每种货物可以在多个存储位置被寻址到。
提出运算方法的目标是,通过S/R系统拣选货物来最大限度的减少行程时间。
我们开发的遗传式和启发式算法,以及通过比较从大量的问题中得到一个最佳的解决方案。
关键词:自动化立体仓库,AS / RS系统,拣选,遗传算法。
1.言在现今的生产环境中,库存等级保持低于过去。
那是因为这种较小的存储系统不仅降低库存量还增加了拣选货物的速度。
自动化立体仓库(AS / RS),一方面通过提供快速响应,来达到高操作效率;另一方面它还有助于运作方面的系统响应时间,减少的拣选完成的总行程时间。
因此,它常被用于制造业、储存仓库和分配设备等行业中。
拣选是仓库检索功能的基本组成部分。
它的主要目的是,在预先指定的地点中选择适当数量的货物以满足客户拣选要求。
虽然拣选操作仅仅是物体在仓储中装卸操作之一,但它却是“最耗时间和花费最大的仓储功能。
许多情形下,仓储盈利的高低就在于是否能将拣选操作运行处理好”。
(Bozer和White)Ratliff和Rosenthal,他们关于自动化立体仓库系统(AS/RS)的拣选问题进行的研究,发明了基图算法,在阶梯式布局中选取最短的访问路径。
Roodbergen 和de Koster 拓展了Ratliff 和Rosenthal算法。
他们认为,在平行巷道拣选问题上,应该穿越巷道末端和中间端进行拣选,就此他们发明了一种动态的规划算法解决这问题。
就此Van den Berg 和Gademann发明了一种运输模型(TP),它是对于指定的存储和卸载进行测算的仪器。
立体仓库--文献翻译
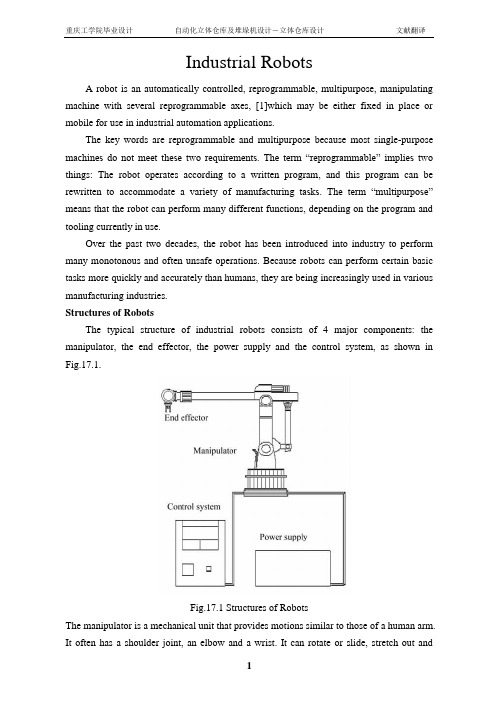
Industrial RobotsA robot is an automatically controlled, reprogrammable, multipurpose, manipulating machine with several reprogrammable axes, [1]which may be either fixed in place or mobile for use in industrial automation applications.The key words are reprogrammable and multipurpose because most single-purpose machines do not meet these two requirements. The term “reprogrammable” implies two things: The robot operates according to a written program, and this program can be rewritten to accommodate a va riety of manufacturing tasks. The term “multipurpose” means that the robot can perform many different functions, depending on the program and tooling currently in use.Over the past two decades, the robot has been introduced into industry to perform many monotonous and often unsafe operations. Because robots can perform certain basic tasks more quickly and accurately than humans, they are being increasingly used in various manufacturing industries.Structures of RobotsThe typical structure of industrial robots consists of 4 major components: the manipulator, the end effector, the power supply and the control system, as shown in Fig.17.1.Fig.17.1 Structures of RobotsThe manipulator is a mechanical unit that provides motions similar to those of a human arm. It often has a shoulder joint, an elbow and a wrist. It can rotate or slide, stretch out andwithdraw in every possible direction with certain flexibility.The basic mechanical configurations of the robot manipulator are categorized as cartesian, cylindrical, spherical and articulated. A robot with a cartesian geometry can move its gripper to any position within the cube or rectangle defined as its working volume. Cylindrical coordinate robots can move the gripper within a volume that is described by a cylinder. The cylindrical coordinate robot is positioned in the work area by two linear movements in the X and Y directions and one angular rotation about the Z axis. Spherical arm geometry robots position the wrist through two rotations and one linear actuation. Articulated industrial robots have an irregular work envelope. This type of robot has two main variants, vertically articulated and horizontally articulated.The end effector attaches itself to the end of the robot wrist, also called end-of-arm tooling. It is the device intended for performing the designed operations as a human hand can. End effectors are generally custom-made to meet special handling requirements. Mechanical grippers are the most commonly used and are equipped with two or more fingers. The selection of an appropriate end effector for a specific application depends on such factors as the payload, environment, reliability, and cost.The power supply is the actuator for moving the robot arm, controlling the joints and operating the end effector. The basic types of power sources include electrical, pneumatic, and hydraulic. Each source of energy and each type of motor has its own characteristics, advantages and limitations. An ac-powered or dc-powered motor may be used depending on the system design and applications. These motors convert electrical energy into mechanical energy to power the robot. Most new robots use electrical power supply. Pneumatic actuators have been used for high speed, nonservo robots and are often used for powering tooling such as grippers. Hydraulic actuators have been used for heavier lift systems, typically where accuracy was not also required.The control system is the communications and information-processing system that gives commands for the movements of the robot. It is the brain of the robot; it sends signals to the power source to move the robot arm to a specific position and to actuate the end effector. It is also the nerves of the robot; it is reprogrammable to send out sequences of instructions for all movements and actions to be taken by the robot.An open-loop controller is the simplest form of the control system, which controls the robot only by following the predetermined step-by-step instructions. This system does not have a self-correcting capability. A close-loop control system uses feedback sensors to produce signals that reflect the current states of the controlled objects. By comparing those feedback signals with the values set by the programmer, the close-loop controller canconduct the robot to move to the precise position and assume the desired attitude, and the end effector can perform with very high accuracy as the close-loop control system can minimize the discrepancy between the controlled object and the predetermined references.Robot ApplicationsThe robot is a very special type of production tool; as a result, the applications in which robots are used are quite broad. These applications can be grouped into three categories: material processing, material handling and assembly.In material processing, robots use tools to process the raw material. For example, the robot tools could include a drill and the robot would be able to perform drilling operations on raw material.Material handling consists of the loading, unloading, and transferring of workpieces in manufacturing facilities. These operations can be performed reliably and repeatedly with robots, thereby improving quality and reducing scrap losses.Assembly is another large application area for using robotics. An automatic assembly system can incorporate automatic testing, robot automation and mechanical handling for reducing labor costs, increasing output and eliminating manual handling concerns. Fig.17.2 is SCARA Robot for automatic assembly.Fig.17.2 SCARA Robot for Automatic Assembly工业机器人机器人是一种自动控制的,可重复编程的,多功能的,由几个可重复编程的坐标系来操纵机器的装置,它可以被固定在某地,还可以是移动的以在工业自动化工厂中使用。
智能停车场系统中英文对照外文翻译文献
智能停车场系统中英文对照外文翻译文献(文档含英文原文和中文翻译)原文:Intelligent parking systemAbstractThe basic concepts of the parking reservation system and parking revenue management system are discussed in this paper. The proposed intelligent’’ parking space inventory control system that is based on a combination of fuzzy logic and integer programming techniques makes ‘‘on line’’ decisions whether to accept or reject a new driver's request for parking. In the first step of the proposed model, the best parking strategies are developed for many different patterns of vehicle arrivals. These parking strategies are developed using integer programming approach. In the second step, learn-ing from the best strategies, specific rules are defined. The uniqueness of the proposed approach is that the rules arederived from the set of chosen examples assuming that the future traffic arrival patterns are known. The results were found to be close to the best solution assuming that the future arrival pattern is known.Keywords: Traffic; Uncertainty modeling; Control; Parking; Fuzzy logic 1.IntroductionEvery day a significant percentage of drivers in single-occupancy vehicles search for a parking space. Additionally, less experienced drivers or out-of-towners further contribute to the increase of traffic congestion. Search for a vacant parking space is a typical example of a search process. Every parking search strategy is composed of a set of vague rules. It is usually difficult to describe these rules explicitly. The type of the planned activity, time of a day, day of the week, current congestion on particular routes, knowledge of city streets, and potentially available parking places have significant influence on a chosen parking search strategy. During the last four decades numerous parking search models have been developed (Vander Goot, 1982; Axhausen and Polak, 1991; Polak and Axhausen, 1990; Young et al., 1991a,b; saltzman, 1997; Shoup, 1997; Steiner, 1998; Thompson and Richardson, 1998; Arnott and Rowse, 1999; Tam and Lam, 2000; Wong et al., 2000; Waterson et al., 2001). In many decision-making situations in transportation (modal split, choice of air carrier, choice of airport, etc.) the competitive alternatives and their characteristics are reasonably well known in advance to the decision maker (passenger, driver). On the other hand, the drivers usually discover diffierent parking alternatives one by one in a temporal sequence. Clearly, this temporal sequence has a very strong influence on the driver's final decision about the parking placeDuring the past two decades, traffic authorities in many cities (Helsinki, Cologne, Mainz, Stuttgart, Wiesbaden, Aalborg, Hague) havestarted to inform and guide drivers to parking facilities with real-time var-iable message signs [directional arrows, names of the parking facilities, status (full, not full, number of available parking spaces, etc.)]. Information about the number of available parking spaces could be displayed on the major roads, streets and intersections, or it could be distributed through the Internet.It is logical to ask the question about the benefits of the parking guidance systems. Current practice shows that parking guidance systems usually do not change the occupancy rate or average parking duration. Drivers easily become familiar with the parking guidance systems, and majority of them use, thrust and appreciate the help of the systems. Guidance systems significantly increase the probability of finding vacant parking space, mitigate frustration of the drivers–visitors unfamiliar with the city center, decrease the queues in front of parking garages, decrease the total amount of vehicle-miles traveled (particularly in the city centers), decrease the average trip time, energy consumption, and air pollution. Parking guidance system is a part of comprehensive parking policy and traffic management system, whose other elements are street parking control (including sanctions for the illegally parked vehicles), parking fare structure, and parking revenue management system.Parking guidance systems help drivers to find vacant parking spaces when they are already on the network, and approaching their final destination. Throughout this research the concepts of the parking reservation system and parking revenue management system are proposed. Such systems would help drivers to find a vacant parking space even before beginning their trip. The proposed ‘‘intelligent’’parking space inventory control system that is based on the combination of simulation, optimization techniques, and fuzzy logic makes ‘‘real-time’’ decisions as to whether to reject or accept a new request for parking. The proposedmethodology could be applied for parking lots and parking garages in cities and at the big international airports.The paper is organized as follows:1. Parking-pricing problems are presented in Section 2. Analogies between parking problems and some other industries are presented in Section 3. The parking revenue management system is introduced in Section 4, and the Intelligent parking space inventory control system is introduced in Section 5. The algorithm to create intelligent parking spaces inventory control system is presented in Section 6. Results obtained with the ‘‘intelligent’’ parking system are given in Section 7, and Sec-tion 8 presents the concluding remarks and further research orientations.2.parking pricingIn majority of cities throughout the world drivers pay for using different parking facilities. In some instances, traffic congestion can be significantly reduced as a result of parking price. The parking revenue is usually used to cover parking facility costs (access gates, ticket printers, parking meters, parking signs, attendants), or to improve some other traffic and transportation activities. Different parking pricing strategies should be a part of the comprehensive solution approach to the complex traffic congestion problems. There is no doubt that parking pricing represents one of the important demand management strategies. For example, traffic authorities, local governments and private sector could introduce higher parking tariffs for solo drivers or for long-term parkers in congested city areas. They could provide special parking discounts to vanpoolers. Obviously parking pricing should be carefully studied in the context of the considered city area (down-town, residential, commercial, retail use areas).In some cities (Madison, Wisconsin) there are already time dependent parking fees that force commuters to switch to diffierent alternativesof public transportation . Trying to promote public transit San Francisco traffic authorities increased parking tariffs at public and commercial garages. The Chicago authorities raised parking rates few times. As a consequence, the total number of cars parked significantly decreased, as well as parking duration time. The greatest decrease was in the number of all day parkers. Authorities in Seattle significantly reduced parking tariffs for carpool at two Seattle parking facilities in downtown . Active role in parking pricing strategies could also have employers paying for employees' parking. Employers who remove parking subsidies for the employees could significantly decrease the total number of solo drivers. The main role of any parking pricing strategy should be reducing the total number of vehicle trips during certain time periods, shifting commuters to alternative transportation modes, and to different parking locations. At the same time, when trying to implement any parking strategy, it is very important to provide enough parking space for shoppers, to provide preferential parking for residents in considered city area, to provide preferential parking for different parking locations, to consider low income families, and to protect streets in the neighborhood from illegal parking.The basic economic concepts of supply and demand should be more utilized when solving complex traffic congestion and parking problems (Vickrey, 1969, 1994; Verhoef et al., 1995). So-called value pricing is also known as congestion pricing, or variable tolling. The basic idea behind the concept of congestion pricing is to force drivers to travel and use transportation facilities more during off-peak hours and less during peak hours. The idea of congestion pricing is primarily connected with the road (drivers pay for using private, faster roads, drivers with lower vehicle occupancy pay for using High Occupancy Vehicle lanes, drivers pay more to enter city's downtown on weekdays) or airportoperators (more expensive landing fees during peak hours). In the context of parking problems, this means: (a) that different parking tariffs should exist for different users; (b) that the parking fees should increase and/or decrease few times during a day.3.Parking problems and revenue management systems: Analogies with some other industriesAirline industry, hotels, car rental, rail, cruise, healthcare, broadcast industry, energy industry, golf,equipment rental, restaurant, and other industries are utilizing revenue management concepts when selling their products (Cross, 1997). Revenue management could be described as a group of different scientific techniques of managing the company revenue when trying to deliver the right product to the right client at the right price at the right time. The roots of the revenue management are in the airline industry. The basic characteristics of the industries to which different revenue management concepts were successfully applied are: (a) variable demand over time; (b) variable asset utilization; (c) perishable assets; (d) limited resources; (e) market segmentation; (f) adding new capacity is expensive, difficult or impossible; (g) direct cost per client is negligible part of the total cost of making service available; (h) selling products in advance. The main characteristics of the parking space inventory control problems are the following:· Parking demand is variable over time.· Like hotel rooms, or restaurant chairs, parking spaces also have daily opportunity to be ‘‘sold’’ (used by clients).·Any parking lot or garage has limited number of parking spaces that can be used by drivers· Market segmentation means that different customers are willing to pay different prices for the same asset (hotel room, airline seat, seat ina rented car). Businessman wanting to park a car near a meeting point 15 minutes before the meeting would be ready to pay much higher parking fee than a pensioner planning to walk with his wife through the downtown, who made parking reservation four day in advance.· Building new garages and parking lots could be very expensive and sometimes very difficult.· Parking places can be easily reserved in advance.Introducing and developing parking reservation system (created in an Internet and cell phone environ-ment) would present further improvement in modern parking technologies. Drivers would be advised and guided before beginning of the trip, as well as during the trip. Parking reservation system should be coupled with the parking revenue management system. In this way, parking operators and traffic authorities would be able to implement different parking strategies. Once the driver is allowed to park, it is possible to implement internal garage guidance system that guides the driver to an empty parking place.4.Introducing parking revenue management systemLet us assume that we have parking reservation system. Drivers make their requests for parking at random moments of time (by phone from home, by cell phone while driving, through the Internet, etc.).A certain number of drivers would maybe cancel their reservations before beginning of the parking.These cancellations would also be made at random moments of time. Like in some other industries, a certain number of drivers would not appear in parking garage for which they have a con-firmed reservation and purchased ticket. Would these drivers be penalized for their behavior? Depending on ration between parking demand and parking supply, the answer could be ‘‘Yes’’ or ‘‘No’’.Reservation system should be flexible enough allowing some drivers to appear right before wished beginning of parking, looking for an emptyspace in a garage, even though they do not have a confirmed reservation. Would it be good to have few different parking tariffs? The answer is obviously ‘‘Yes’’. Drivers paying lower parking tariffs could be disabled and senior citizens, people who reserve parking space few days in advance, or HOV drivers. Drivers paying higher tariffs could be solo drivers, long term parking drivers, or drivers showing up and asking for parking without making reservation in advance. Obviously, there is a lot of possible parking pricing strategies.The stochastic nature of reservation generation and cancellation, the stochastic nature of driver show-up during reserved time slot, variety of parking tariffs, and the need to respond to drivers' requests in real time, indicate that the management of parking garage revenues represents a complex problem.In the past 30 years a relatively large number of papers have been devoted to different aspects of the air-line seat inventory control problem (Littlewood, 1972; Belobaba, 1987; Brumelle and McGill, 1993; Teodorovic et al., 2002). The model proposed in this paper is highly inspired by the developed airline yield management stochastic and/or deterministic models.Let us assume that we have few different parking tariffs. The simplest reservation system (similar to some airline reservation systems in the past) could be ‘‘distinct tariff class parking space inventories’’ (Fig. 1(a)),indicating separate parking spaces in the garage for each tariff class. In this case, once the parking space is assigned to a tariff class, it may be booked only in that tariff class or else remains unsold. There are certain advantages, as well as certain disadvantages in the case of distinct parking space inventories. In this case users paying lower tariffs would be relatively well ‘‘protected’’. In other words, this system would pay a lot of attention to the disabled person, senior citizens,people who reserve parking space few days in advance, and HOV drivers. Obvious disadvantage of the distinct parking space inventories is the fact that very often some parking spaces assigned to lower tariff users would be empty even the higher tariff users demand is very high. In other words, it would be possible to reject some drivers even all parking spaces in garage are not occupied.In case of a ‘‘nested reservation system ’’, the high tariff request will not be rejected as long as any parking spaces are available in lower tariff classes. For example, if we have four tariff classes, then there is no booking limit for class 1, but there are booking limits (BLi, i = 2, 3, . . ., m) for each of the remaining three classes (Fig. 1(b)). As we can see from Fig. 1(b), all parking spaces are always available to class1. There are always a certain number of parking spaces protected for class 1, certain number of parking spaces protected for classes 1 and 2, and certain number of parking spaces protected for classes 1, 2 and 3. If we make a request-by-request revision of booking limits, there is no longer a difference between distinct and nested reservation system.In this research (like in the paper of Teodorovic ´ et al., 2002) an attempt was made to make reservation decisions on theBL1BL2BLmCBL1=CBL2BLm (a)(b)Fig.1‘‘request-by-request’’ basis. In the scenario that we consider, we assume that there are more than two types of tariffs. The basic characteristic of the parking space inventory control model that we propose is ‘‘real-time’’ decision making about each driver request. The developed model is called an ‘‘intelligent’’ parking space inventory control system.译文:智能停车场系统摘要:本文讨论停车预订系统和停车收入管理系统的基本概念.拟议的智能停车空间的库存控制系统,基于模糊逻辑和整数规划技术相结合,使“上线”决定是否接受或拒绝新的驱动程序的停车要求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
我们可以利用 7805 芯片执行转换从而得到 12 伏直流电压提供给整个项目。虽然负载电 流或温度会有所变化,但是我们将集成电路电压调节器的输出连接到过滤整流器就保证了 输 出电压或电流的稳定。这样集成的电路调节器有三个端子、一个输入端子、一个输出端 和一 个参考端子。
C .晶体振荡器
2. 项目研究现状
在信息时代,我们可以看到人口已经增长到了一个不可控制的程度。为了弥补这个问题 我们设计了很多的大型项目。但是很多项目都不安全,从人类的利益和缓解停车危机的角度 出发我们设计了多层旋转停车场,这个设计可以有效的处理安全问题。目前的立体停车系统 都是线性机制的,而我们发现最能替代缓解用户和节省空间的是旋转立体停车系统。这个项 目的另一个与众不同的特性是我们嵌入了密码锁定系统,每个用户都有自己独特的密码可以 增加安全性,万一用户忘记了密码,我们还做了一些访问技术可以解决这个问题。
D .液晶显示
在这个项目中使用了一个 16x2 的液晶显示器,显示由单片机产生的消息,即显示了密 码,欢迎信息和其他必要的信息。液晶是一种小型低成本显示,在嵌入式控制器与微控制 器 接口很好使用。许多微控制器有库代码,使显示消息如显示一行代码简单。液晶显示不 同于 其他显示设备,如 7 段显示,真空荧光显示器等显示,这些显示设备产生光,但是 LCD 控制 光。因此,液晶显示器的外观也完全不同于其他显示器。LCD 字符通常在光线背景下面显示 深色。
学海无 涯
附件 2:外文文献译文与原文
专业班级:电气 124 姓名:陈威驰 学号:2012013850
基于密码的旋转多层停车场系统
作者:Nayab Suhail Hamirani, Imdad Ali Ismaili, Asad Ali Shaikh, Faheem Ahmed, Azhar Ali Shah 摘要:在人口稠密地区和较大的城市,由于交通拥挤,停车成为了一个大问题。使用旋转立 体停车系统能够有效地减轻这个问题。使用停车系统能够在更少的空间获得更安全的停车 场。为了降低成本并获得更小的空间和最佳的性能,我们使用 ATMEL 单片机作为主处理器, 同时借助 LCD 和电机分别用于显示和旋转楼层。密码锁定系统用来区分用户并检测停车场还 剩下多少自由空间。随着市场的全球化,汽车的数量也上升到了无法控制的局面。设计这 个 系统模型的初衷就是为了解决这个问题,同时本项目中嵌入密码锁定系统也可以提高车 辆停 车的安全性。 关键词:基于密码的安全性;单片机;直流齿轮电机;普通 IC;快速 PCB
图 1 系统概述
4. 系统模型
图 1 所示的系统模型由两层组成。当然在某些环境我们可以用几百个可以转动切换的楼 层实现系统。每个用户都能被分到一个楼层和停车位号码。在机械部件的底座部分有一个直 流电机来执行旋转。这里为了简单起见我们只用一扇门同时作为入口和出口。我们使用楼 层 上的按键当作电机开关还同时使用了传感器检测汽车的重量来充当开关用以打开或关 闭大 门。我们用 I.E 处理器中的微控制器来处理 LCD 和开关。
3. 基本思路
我们在项目里放一个液晶用了显示各种信息。一个 LCD 屏幕放在大门口,当车辆到达门
- 1-
学海无涯
口区域时 LCD 屏幕在初始化后将显示一个“欢迎”消息,然后检测车辆重量并等待用户输入 信息。这个时候用户有两种选择,要么把车辆停放到车库中,或从车库里提车。当用户要停 放他/她的车辆时,他/她会得到一个密码。用户为了提车就要通过按键输入密码,如果密码 错误就无法提车,在这种情况下他/她必须找管理员处理才能够提到车。分配给用户的特定 密码长四位数而且会显示在屏幕上的液晶两秒,它根据编程的变化可能会有所不同。该项目 建立在楼层的动力机制上。这些楼层可以由单片机控制着旋转到特定的位置,即升高和向下 到各个楼层。在我们的模型中是一个两层停车场,每层有四个车位,总共有八个停车车位。 当车辆靠近入口大门时,安装在地面上微动开关就会收到挤压。如果停车场已满,没有可用 空间建筑停车的车辆,那么 LCD 液晶将显示“对不起”。 我们已经使用了塑料原型作为机 械模型,实际操作中我们可以讲楼层可以增加至任何数量。图 1 是一个大型停车场的系统图。
5. 处理技术
因为 89c51 很简单,所以我们将 ATMEL 89c51 单片机作为主处理器,整个编程是用汇编 语言完成的[2]。AT89C51 单片机是一个 8 位低功耗微控制器,具有良好的工作效率,它的内 存是 4 k 字节,当然取决于我们的项目要求我们也可以连接外部内存。内部闪存的可再编程 这是它最强大的功能之一。Atmel 89C51 是一款高度灵活、廉价的嵌入式控制应用的微控制 器。
振荡器是一个能够产生没有任何外部信号源的输出波形的电路,直流电源以这个输出 作 为唯一的输入。因此,振荡器可以看作一个信号发生器,当然,有许多类型的振荡器。 在单 片机和微处理器为基础的项目,晶体振荡器是使用最广泛的一个振荡器,因为它能够 产生非 常稳定的输出波形,而大多数通信应用程序也要求使用非常稳定的振荡器输出信号 。石英晶 体是决定晶体振荡器的主要频率的原件。
1. 引言
本项目的目的是设计一种自动多层停车场系统,帮助普通民众将车停放在更小更安全的 地方。由于现代人口密集,以前的一些停车位被用作一些基础设施的建设,在大企业和公寓 需要一个可以避免空间浪费的创新设计。但是,这类项目的开发一直有个问题,虽然这些停 车场是多层的,可是并不安全。因此为了能够使用密码锁设备我们使用了微控制器,同时我 们还使用了旋转楼层以保证最佳的设计。本项目基于圆形建筑而不是正方形或长方形的建筑 物,之所以这么选择是因为通过使用圆形建筑形状我们可以停放更多的车辆,但是使用其他 形状的建筑物像正方形和矩形就很难这么做[1]。在提案中,我们需要的器件包括两个电机, 不同的操作开关,一个振荡器,一个按钮和液晶显示屏[6]。
- 2-
6.系统组成
学海无 涯
A. 外围驱动阵列集成电路
我们使用外围驱动器集成电路与单片机接口集成的电路连接三个继电器去控制电机。 Darlington 的 NPN 型晶体管非常适合逻辑电平数字电路(ATMEL 89c51) 之间的低压接口和 高电流/电压设备,同样也适用在工业和消费领域的继电器和其他应用程序。ULN2003 集成 电路是一种高电压、高电流接口集成电路。