电动轮椅运动控制系统设计【控制理论与控制工程专业优秀论文】
多功能智能轮椅设计-运动控制系统的设计与实现

多功能智能轮椅设计-运动控制系统的设计与实现多功能智能轮椅设计-运动控制系统的设计与实现v>多功能智能轮椅设计—运动控制系统的设计与实现多功能智能轮椅设计-运动控制系统的设计与实现摘要在现如今智能化高速发展的时代,智能、科技已然成为时代的主题之一,智能产品也被越来越多运用到各行业中。
而正是由于不断发展的科技,人们也越来越追求高智能化的产品。
基于为残障人士与老年人服务,本着操作简单,方便使用者的观念,这次的设计在现有轮椅的基础上优化了轮椅原有的设计,实现了轮椅的自主导航以及避障的功能,极大的方便了使用者的使用,同时也解决了这些人中大多数人都由于出行问题而无法体验到生活的乐趣,领略祖国美好河山的问题。
本设计采用 arduino 单片机 MEGA2560 作为控制的核心,通过摇杆模块、电机驱动模块、推杆模块、继电器模块等,实现了电机的正反转以及调速,同时利用电机的正反转实现轮椅整体的行进方向,以及对推杆电机的控制进而实现轮椅背部与脚架的角度控制,最终实现可让使用者根据自己需求选择自己舒服的角度。
全文讲述了个人设计智能轮椅的软件方案与硬件的电路设计控制实现的全部过程,包含各元器件选择、电气原理图设计、程序编写,硬件调试以及控制实现过程心得体会等。
关键词:智能轮椅;arduino 单片机;程序设计;Multi-functional intelligent wheelchair design - design and implementation of motion control system Abstract In today's era of rapid development of intelligence, intelligence, technology has become one of the themes of The Times, intelligent products have been increasingly used in various industries. And just because of the constant development of science and technology, people are also more and more in pursuit of high intelligent products. Based on the service for the disabled and the elderly, in line with simple operation, convenient user's concept, Based on the original design, the existing wheelchair was optimized, realized the wheelchair autonomous navigation and obstacle avoidance function, greatly convenient for the user's use, but also solved the problems of most of these people are due to travel to experience the fun of the life, appreciate the problem of the motherland beautiful country side. This design makes the arduino microcontroller MEGA2560 as control core,through the rocker arm module, motor driver module, a push rod module, relay module, realize the positive &negative and speed of the motor, at the same time using of the motor and reversing the wheelchair overall direction, and the push rod motor to realize the control of the wheelchair back and legs Angle control, finally realize can make users according to their own needs to choose their own comfortable angle. This paper describes the entire process of personal design of intelligent wheelchair software scheme and hardware circuit designand control, including the selection of components, electrical schematic design, programming, hardware debugging and control of the realization process experience. .Keywords: Intelligent wheelchair; Arduino microcontroller; Program design; 目录 1 绪论 1 1.1 研究的意义1 1.2 现今智能轮椅研究的现状 1 1.3 研究的基本思路与设计方案 2 2 安全性能要求以及电气控制原理 4 2.1 轮椅设计安全性能要求 4 2.2 智能轮椅的电气控制设计原理 5 3 硬件设计 8 3.1 直流电机模块 8 3.2 继电器模块 13 3.3 推杆电机模块 16 3.4 摇杆模块 18 4 软件设计 21 4.1 程序流程图 21 4.2 继电器模块程序设计 22 4.3 摇杆程序设计 23 4.4 直流电机控制程序设计 24 4.5推杆程序设计 28 5 软硬件的联合调试及效果验证 31 5.1 软硬件的联合调试31 5.2 软硬件的效果验证 33 6 结论与展望 37 参考文献 38 致谢 39 附录 40 附录 1 40 附录 2 41 附录 3 44 1 绪论 1.1 研究的意义智能轮椅的产生,是为了服务与行动不便的老年人和残障人士这一类群体。
智能轮椅中电机控制系统的设计

www�ele169�com | 29智能应用0 引言由于人口老龄化因素和失能人士的增多,社会对智能轮椅的需求随之增加。
本文所述的智能轮椅是一种装载了各类传感器、能够自动驾驶和避障、能够和互联网相连接的轮椅。
为了解决智能轮椅移动的控制问题,本文设计了基于STC15F2K60S2单片机的电机控制器,用来控制和驱动轮椅移动,经过试验,该控制器达到了设计的需求,能够接收车载控制器发出的指令并驱动轮椅移动。
1 步进电机控制系统硬件设计及仿真■1.1 硬件设计系统核心。
如图1所示,单片机通过IO 口与步进电机驱动器相连接,驱动器驱动电机运动。
其中单片机P00口输出控制转动方向,P01口输出脉冲驱动步进电机移动;P21口和P22口为步进电机的上下限位开关,当电机移动到边缘触发限位开关时,电机无法前行,但是可以后退;步进电机驱动器接收到单片机的控制信号后将控制信号转换为驱动信号,通过4条信号线(+A,-A,+B,-B)驱动电机转动;单片机通过RS232或者RS485接口接受上位机所发送的指令控制电机移动,并实时将电机运转状态反馈给上位机。
■1.2 虚拟仿真为了验证硬件设计是否满足需求,本文在Proteus8仿智能轮椅中电机控制系统的设计卢展铭,陈亦翔,谢秀齐,何晓昀(广东理工学院,广东肇庆,526100)基金项目:广东理工学院大学生创新创业训练计划项目(CXCY201813720015),2019年度广东大学生科技创新培育专项资金项目(pdjh2019b0577),广东理工学院大学生创新创业扶持项目资助(cxcyjj2018004),广东理工学院教学成果奖培育项目(JXCGPY2018002)。
摘要:由于人口老龄化和失能人士的增多,社会对智能轮椅的需求随之增加。
为了解决轮椅自动移动的控制问题,本文设计了基于STC15F2K60S2单片机的控制系统用于驱动轮椅移动。
该控制系统能通过上位机发送串口通讯指令控制电机的转动方向、转动速度、转动距离等一系列的操作。
基于电动轮椅车动力转向的智能操控系统设计
基于电动轮椅车动力转向的智能操控系统设计电动轮椅车是一种为行动不便的人士提供移动便利的工具。
为了提高电动轮椅车的操控性能和用户体验,智能操控系统的设计变得尤为关键。
本文将讨论基于电动轮椅车动力转向的智能操控系统的设计原理和功能。
一、系统设计原理1. 动力转向技术电动轮椅车动力转向指的是通过改变不同轮子上的驱动力矢量,实现转向效果。
在传统的电动轮椅车设计中,通常通过电机控制前轮的转向。
然而,这种方式可能导致转向灵活性不足和操控困难。
因此,基于电动轮椅车动力转向的智能操控系统设计应采用更加先进的技术。
2. 转向算法智能操控系统设计中的关键是开发高效、精确的转向算法。
这些算法可根据电动轮椅车的速度、转弯半径和用户输入等信息,实时计算出最佳的转向方案。
例如,可以基于模糊逻辑控制(Fuzzy Logic Control)或者模型预测控制(Model Predictive Control)等方法来实现转向算法。
二、系统设计功能1. 自适应转向基于电动轮椅车动力转向的智能操控系统设计应具备自适应转向功能。
这意味着系统能够根据不同的操控需求和环境条件,自动调整转向方案。
例如,在行驶速度较低时,系统可使电动轮椅车具备更小的转向半径,以便在狭小空间内转弯;而在高速行驶时,则可使电动轮椅车转向更加稳定。
2. 防抱死制动系统(ABS)为了提高安全性能,智能操控系统设计还应包括防抱死制动系统(ABS)。
ABS能够通过减少或控制刹车力度,防止车轮在制动时锁死,从而提高制动稳定性和操控性。
3. 曲线行驶辅助基于电动轮椅车动力转向的智能操控系统设计还应具备曲线行驶辅助功能。
该功能可以通过优化电池电量分配和转向角度控制,帮助电动轮椅车在弯道上更加平稳地行驶,并减少滑动和漂移现象。
4. 避障功能为了提高安全性和用户体验,智能操控系统设计可能还包括避障功能。
该功能利用传感器和算法来监测周围环境中的障碍物,并自动调整行驶方向,以避免碰撞。
基于ATmega48的电动轮椅主从控制系统设计
就是后轮驱 动, 其整体性 能较好, 但是回转半径 较大【。 另一种则是在驱动控制系统上不断进行 创新 , 目前控制器从硬件模拟电器件转 向采用数 字电路、 单片机 以及数 字信号处理器方向发展 , 实现 数字化 的数 模混合控制和全 数字化 控制 ,
控制规律也从硬件实现转向软件实现【。 3 1 根 据 电动轮 椅 的性 能要求A me a 8 电动轮椅主从控 制系统设计 T g4 的
王 晓旭 杨振 强 张 涛
大连理工大学 ( 10 4 162 )
P we h e c a rCo t o y t m e i n Ba e n ATm e a 8 o rW e l h i n r lS s e D s g s d o g 4
Wa gXi x Y n Zhe n ao u ag nqi n a g Zha g ao n T
Dain Un v ri fT c n lg la i e st o e h oo y y
摘
要 : 出了一种 针对轮 毂 式两 轮驱 动 电动轮 椅 提
不断扩大, 对其性能也提 出了越 来越高的要求 ,
文设计了一种用于双独立电机驱动的电动轮椅主
从控制系统 , 该控制系统由两台基于AT g 4 me a 8
1 电动轮椅发展概 况及 其技术要求
电动轮椅是一种 以蓄 电池为能源、 电机 驱动 的轮椅【, ¨ 具有操作简单 、 节省体力、 车速平稳和
的单电机控制器组成。 轮椅车结构简单 , 操作方 便, 可以实现 小半径 转 弯, 全方 向移动 , 有很 具
关键词 : 电动轮椅 控制器 双 电机协调控制
Ab t a t s r e :A e i n o e d f e e ta p e o to d sg f t if r n i ls e d c n r l h a d d i e s s e ,s t b e f r a t . e ld i e t h n rv y t m ui l o wo wh e rv o t e a wh e — u o rwh ec a rwa r s n e . y t e i i g e l b p we e lh i sp e e t d S n h tz n h t ev ro s i d f a a t r , h o to se f c sn h a i u n so p r me e s t ec n r l y tm o u i g k s o er a o a l t o f u 1 t r o r i a e o to n t s n b eme d o a . h e h d mo o o d n t d c n r l c wa e i n d By me nso e s ra o s d sg e . a ft e ilc mmu i ai n h e h n c to ,t m a t rs a e c n r ls t m o i tn ft e a a e se - l v o t o yse c ns si g o wo s p r t mo o o t o l r s e s d t e a v n a e f mo t t rc n r le spo s s e h d a t g s o s o h s n h o o t r,sa l n e u e s e d a l a h y c r n uss a t t b e a d s c r p e , swe l st e o e - u r n , v rv l g d o e -e e a u e p o e t n v rc re t o e - o t e a v rt mp r t r r t c i a n o f n to s u cin . Ke wo ds P we e lh i Co t l r Du l t r y r :o r wh ec ar nr l o e a- mo o c o dn t dc n o o r i a e o t l r
电动轮椅车动力转向的智能化控制系统设计
电动轮椅车动力转向的智能化控制系统设计随着人口老龄化程度不断加深,电动轮椅车作为一种重要的辅助交通工具,为行动不便的人提供了更多的自由和独立性。
为确保电动轮椅车的稳定性和操控性能,设计一个智能化的控制系统变得尤为重要。
本文将探讨电动轮椅车动力转向的智能化控制系统设计,并详细阐述其实施方案和设计要点。
一、引言电动轮椅车的动力转向控制系统的设计目标是提高操控性能,提供更好的用户体验。
该系统需要结合传感器技术、电机技术和控制算法来实现智能化控制。
本文将从这三个方面详细阐述电动轮椅车动力转向的智能化控制系统设计。
二、传感器技术在智能化控制系统设计中的应用传感器技术在电动轮椅车动力转向的智能化控制系统设计中起着关键作用。
通过安装合适的传感器,可以实时获取车辆运行的信息和环境数据,从而提供给控制系统,以实现动力转向的智能化控制。
常用的传感器包括速度传感器、角度传感器和力传感器。
速度传感器主要用于测量车辆的速度信息,可以帮助控制系统根据车速进行精准的控制。
角度传感器用于测量转向轮的转角,以便控制系统能准确判断转向的情况。
力传感器用于测量转向力的大小,从而实现动力转向的精确控制。
传感器技术不仅使得控制系统能够实时获取车辆信息,还可以通过传感器的数据判断车辆是否处于危险状态,如过度倾斜、碰撞等情况,从而及时采取相应的控制措施,保证安全性。
三、电机技术在智能化控制系统设计中的应用电动轮椅车的动力转向主要依靠电机系统实现。
为了实现精确控制和高效能的动力转向,需要选用合适的电机并配备相应的控制设备。
在电机选择方面,应考虑功率、转速、扭矩和效率等因素。
根据实际需求,选用合适的电机类型,如直流电机、无刷直流电机或步进电机,并结合控制系统,实现精确的动力转向控制。
控制设备主要包括电机控制器和电池管理系统。
电机控制器负责接收传感器的数据,并根据需要控制电机的转向和转速。
电池管理系统则负责监测电池的电量,以便及时调整电源输出,确保电动轮椅车的稳定运行。
一种多功能智能轮椅的控制系统设计

关键词
下肢康复训练 ; 智能家居 ; 语音识别 ; 多功能智能轮椅
文献标 识码 : B 文章编号 : 1 0 0 1 1 2 4 2 ( 2 0 1 6 ) 一 1 1 - 1 2 4 6 — 0 0 4
目( 1 5 Dz 1 9 4 1 9 0 2 )
1 上海理工大学 医疗器械与食品学院康复工程与技术研究所 , 上海康复器械工程技术研究 中心 , 2 0 0 0 9 3 ;2 通讯作者
作者简介 : 胡杰 , 男, 硕士研究生 ;收稿 日 期: 2 0 1 5 — 0 7 — 0 2
】 2 4 6 WWW. r e h a b i . C O m . c r t
C h i n e s e J o u r n a l o f R e h a b i l i t a t i o n Me d i c i n e ,N o v .2 0 1 6 , V o 1 . 3 1 ,N o . 1 1
・
康复 工程 ・
一
种多功能智能轮椅 的控制 系统设 计
通 电动轮椅基本的代步行驶功能 ; ②接收控制指令精确地控
D OI : 1 0 . 3 9 6 9 / j . i s s n . 1 0 0 1 ・ 1 2 4 2 . 2 0 l 6 . 1 1 . 0 1 4
+ 基金项 目: 上海市产学研医项 目资助 ( 1 2 D Z 1 9 4 1 0 0 3 ;1 2 D Z 1 9 4 1 0 0 4 ) ; 上海工程技术研究中心项 目资助( 1 5 D Z 2 2 5 1 7 0 0 ) ; 上海科委 产学研 医项
电动轮椅运动控制系统的设计
1 引言
随着 时代 的发展 ,我国已经开始步入老龄化社会 , 现 有老年人近 2 亿人 ,而残疾人 也超过 8 千万 人。在老 年人 当中 ,将近有 l 千 万人 下肢行 动不 便,另外 , 每 年新增 因车祸、工伤和其他意外下 肢伤 残者
理 论 研 究
泰工案 收术
2 6 2
电动轮椅运动控制 系统 的设 计
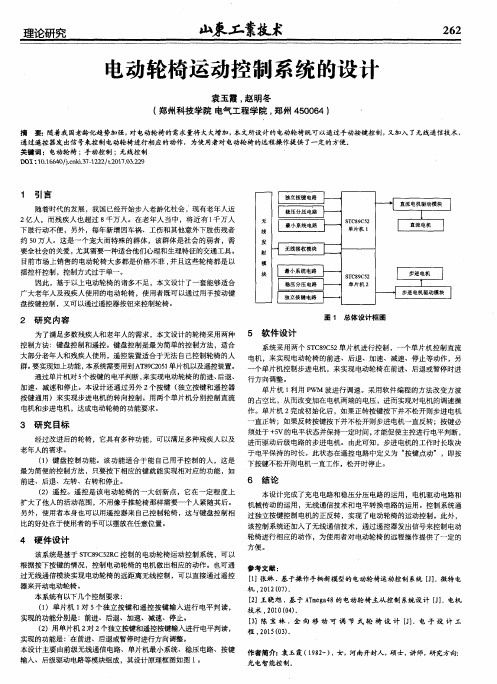
袁玉霞 , 赵明冬 ( 郑州科技学院 电气 工程学 院 , 郑州 4 5 0 0 6 4)
摘 要: 随着我 国老龄化趋 势加 强, 对 电动轮椅的需求量将大大增加, 本文所设计 的电动轮椅既可 以通过手动按键控制 , 又加入 了无线通信技术 通过遥控 器发 出信号来控制 电动轮椅 进行相应 的动作 ,为使 用者对 电动轮椅 的远程操作提供 了一定的方便。 关键词 :电动轮椅 ; 手动控制 : 无线控 制
参考文献 :
[ 1 】 张琳 . 基于操 作手柄新模 型的电动轮椅运 动控制 系统 [ J ] . 微特 电
机, 2 0 1 2 ( 0 7 ) .
本 系统有 以下几个控制要求 :
[ 2 】 王 晓旭 . 基于 A T m e g a 4 8 的 电动轮 椅主从控 制系统设计 [ J ] .电机
图 1 总体 设 计 框 图
系统采 用两个 S T C 8 9 C 5 2 单片机进行控 制 ,一个单片机控 制直流
电机 ,来实现 电动轮椅 的前进、后退、加速、减速、停止等动作 ,另
一
群。 要实现如上功能, 本 系统需要用到A T 8 9 C 2 0 5 1 单片机 以及遥控装置。
第五章 电动轮椅运动控制系统的软件设计

第五章电动轮椅运动控制系统的软件设计在本系统的控制方案中,作者采用 TMS320LF2407A DSP 控制芯片作为系统的核心控制芯片。
它具有很快的运行速度,丰富的片内外设等系统资源和强大的中断功能以及灵活丰富的指令集、高速运算能力、内部操作的灵活性、低功耗等特点,使得在系统的软件设计中,可以实现复杂的控制算法。
系统软件设计的终极目的是:实现两个电机平滑稳定的协调运动控制,实现轮椅控制器的人机交互功能,具备完善的故障保护功能,且可以和 PC 机通讯的功能,使得轮椅能够在各种允许路况下都具有非常平稳舒适的运行性能。
5.1 系统的软件设计方案5.1.1 系统的控制方块图由第二章可知,本系统是采用电压负反馈、电流截止负反馈和电流正反馈补偿的控制算法实现两台直流电机的协调运动控制。
调节器是数字 PI 调节器。
系统的控制方块图如图 5-1 所示:图5-1 轮椅运动控制系统控制方块图由图 5-1 可知,操纵杆的输出信号 X、Y 经过 S 曲线和左/右电机给定发生器后合成为左/右电机的给定信号,取电机两端电压以及电流采样电阻电压作为反馈信号。
为了防止轮椅起动或堵转时电机电流过大,本文采用了具有电流截止负反馈的电压闭环调速系统。
电流正反馈补偿环节是为了补偿由于电枢电阻引起的速降以提高系统的机械特性。
当轮椅运行在比较糟糕的路况时,轮椅的左/右电机在相同的给定下,负载大小可能不同,这时当用户本想径直前进时,轮椅可能由于左/右电机负载的不同,而转弯,图 5-1中的“负载不平衡时电流正反馈补偿”环节就是为克服这种情况而设计的。
S 曲线的设置使得轮椅在起/制动时都能够非常平滑和舒适,保证了安全性。
速度给定发生器和负载补偿仲裁器是两台电机协调控制的核心指挥部,它们保证了轮椅在二维平面上的自由运行。
5.1.2 本系统软件控制的时序对于一个以 TMS320LF2407A 为核心控制芯片的控制系统来说,首要的任务是确定系统的时钟系统,其次是合理决定软件中的中断数量和顺序。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电动轮椅是一种以蓄电池为能源、电机驱动的轮椅车。适于下肢残疾、高位截瘫或偏瘫以及年老体弱 者使用,是一种比较理想的移动或代步工具。
目前,国外对电动轮椅的研究已相对比较成熟。他们已开发出各种各样的适合 不同用户群体的电动轮椅,并逐渐向智能化的方向发展。现在高性能电动轮椅生产 厂家多集中在美国、德国、澳大利亚和西班牙,中国台湾也有电动轮椅生产厂家。 然而,国内对电动轮椅的研究技术依然远远落后于国外,绝大多数轮椅厂家都只生 产电机和座椅而不生产控制器,基本上都依赖于进口。因此,研究高性能低成本的 电动轮椅驱动器,替代进口填补国内技术空白具有重要意义。
分析设计的系统通过系统运行实验性能良好,达到了预期设计目标。
关键词:电动轮椅控制器 双电机协调控制 S 曲线 故障检测
I
Abstract
Electric powered wheelchair (EPW) is a wheeled vehicle which takes storage battery as power and motor as driving with characteristics of labor saving, easy operation, stable speed, free-pollution and low noise. It very benefits for the people with lower or upper extremely impairment, the old or the valetudinarians. To these people, EPW is their primary and ideal means of mobility.
Currently, some overseas countries they are very experienced in researching EPWs. They have developed various kinds of EPWs for sorts of special user group. EPW is becoming more intelligent and tending to be humanization gradually. Now most of the high performance EPW plants they are located in developed countries, such as America, Australia, Germany, Spain and also Taiwan province of China. In addition, domestic research on EPWs techniques falls behind the one of overseas a lot. Mainly most of the national EPWs plants produce DC motor and wheelchair seat only, while controller is imported. Accordingly, it is very significant to develop high performance, low cost and all-digital EPWs controller, while it also fills up the technique blanks of domestic EPWs research technology.
The author investigated plenty of literatures on the topic, summarized current EPWs research technology and present research status of EPWs. An all-digital EPW controller based on TMS320LF2406A digital signal processor (DSP) is developed in the thesis. Technique specification of EPW is analyzed in details. A two-motor coordinated control scheme which takes motor voltage as negative feedback with motor current compensation and unbalanced load compensation is designed in the thesis. Firmware architecture, cell circuits and parameter preferences methodology are represented. After analyzing the principle of Joystick operation, formulas of the EPW’s speed and direction given value composition are proposed. A strategy of generating S curve is designed for improving user
作者广泛查阅国内外文献,总结了电动轮椅研究技术,综述了电动轮椅国内外 研究现状。开发出了基于 TMS320LF2406A DSP 数字信号处理器的全数字电动轮椅 控制器,分析了轮椅的技术要求,设计了带电流补偿的电压负反馈加负载不平衡补 偿的双电机协调控制方案;给出了软硬件结构和单元电路的设计及参数选择方法; 分析了操纵杆工作原理给出了轮椅速度和运动方向信息合成计算公式,和提高运行 舒适度的 S 曲线生成策略。文中还提出了基于电压信号检测的功率管及主电路故障 检测、定位方法。