BOOST电路pid和fuzzy闭环控制仿真
pid和fuzzy在boost中的应用与MATLAB仿真
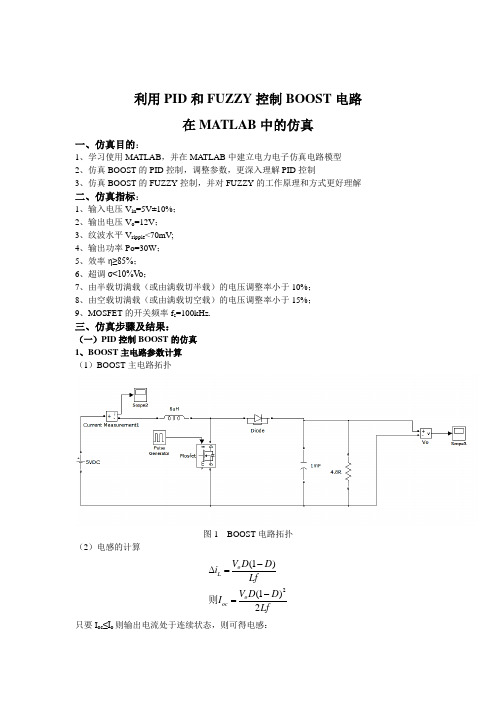
利用PID 和FUZZY 控制BOOST 电路在MATLAB 中的仿真一、仿真目的:1、学习使用MATLAB ,并在MATLAB 中建立电力电子仿真电路模型2、仿真BOOST 的PID 控制,调整参数,更深入理解PID 控制3、仿真BOOST 的FUZZY 控制,并对FUZZY 的工作原理和方式更好理解二、仿真指标:1、输入电压V in =5V±10%;2、输出电压V o =12V ;3、纹波水平V ripple <70mV;4、输出功率Po=30W ;5、效率η≥85%;6、超调σ<10%Vo ;7、由半载切满载(或由满载切半载)的电压调整率小于10%; 8、由空载切满载(或由满载切空载)的电压调整率小于15%; 9、MOSFET 的开关频率f s =100kHz.三、仿真步骤及结果:(一)PID 控制BOOST 的仿真 1、BOOST 主电路参数计算 (1)BOOST 主电路拓扑图1 BOOST 电路拓扑(2)电感的计算2(1)(1)2o L o oc V D D i LfV D D I Lf-∆=-=则只要I oc ≤I o 则输出电流处于连续状态,则可得电感:23(1)120.1137 2.7330221001012o oc V D D L uH I f -⨯≥==⨯⨯⨯(3)输出滤波电容C 的计算370223.27010o o I DQ V mV C fCI DC uFf -∆∆==<>=⨯2、BOOST 闭环PID 的MATLAB 仿真(1)在Simulink 中搭建好BUCK 电路的仿真模型,使用开关器件是MOSFET ,其开关频率用100kHz ,电感电容分别由上述公式计算得到,电路临界电感为 2.3uH ,临界电容为223.2uF ,如图2所示。
图2 BOOST 闭环PID 模型(2)BOOST 电路闭环PID 参数的设计过程I 、BOOST 电路的PID 闭环系统框图如图3所示。
boost的PID和FUZZY调节电路

boost的PID和FUZZY调节电路目录第一章绪论............................................................................................................ - 1 -第二章PID对BOOST电路的控制及仿真 .................................................................... - 1 -2.1 设计要求........................................................................................................ - 1 -2.2 设计思路........................................................................................................ - 1 -2.3 设计过程........................................................................................................ - 2 -2.4调制过程........................................................................................................... - 5 -2.5仿真结果及分析............................................................................................... - 7 -第三章FUZZY对BOOST电路的控制及仿真............................................................ - 11 -3.1 设计要求...................................................................................................... - 11 -3.2 设计思路...................................................................................................... - 11 -3.3 设计过程...................................................................................................... - 11 -3.3 调试及仿真结果.......................................................................................... - 14 - 附录参考文献第二章PID对BOOST电路的控制及仿真2.1 设计要求1、设计一个升压电路,使输入电压在20V到95V,输出电压为100V且输出电流不超过18A。
BOOST电路设计与仿真

目录Boost变换器性能指标:输入电压:标准直流电压Vin=48V输出电压:直流电压Vo=220V 参考电压 Vref=5V输出功率:Pout=5Kw输出电压纹波:Vpp= Vm=4V电流纹波:开关频率:fs=100kHz相位裕度:60幅值裕度:10dB一. Boost主电路设计:占空比D计算根据Boost变换器输入输出电压之间的关系求出占空比D的变化范围;=0.782D=U U−U UUUUUU U临界电感L计算=1.8UULc=UU U(1−U)22U U U U选取L>Lc,在此选L=4uH临界电容C计算取纹波Vpp<C=U U UU U U UU =22.7×0.782100000×2.2=80.6UU选取C>Cc,在此选C=100uF 输出电阻阻值R=UU=U×UU=9.68Boost主电路传递函数Gvds占空比dt到输出电压Vot的传递函数为:UUU (U)=(1−U)U(1−UU(1−D)2U)UUU2+U(UU)+(1−U)2UUU (U)=47.96∗(1−8.7×10−6U)4×10−10U2+4.13×10−7U+0.048二. Boost变换器开环分析PSIM仿真电压仿真波形如下图电压稳定时间大约毫秒,稳定在220V左右电压稳定后的纹波如下图电压稳定后的纹波大约为电流仿真波形如下图电流稳定时间大约2毫秒,稳定在22A左右电流稳定后的纹波如下图Matlab仿真频域特性设定参考电压为5V,则U(U)=UUUU =UUU,U U(U)=UU U=UU系统的开环传递函数为U U(U)=U UU(U)U U(U)U(U)U U(U),其中U(U)= U,U U(U)=U由上图可得,Gvds的低频增益为-60dB,截止频率fc=196KHz,相位裕度,相位裕度过小,高频段是-20dB/dec;系统不稳定,需要加控制电路调整;1、开环传递函数在低频段的增益较小,会导致较大的稳态误差2、中频段的剪切频率较小会影响系统的响应速度,使调节时间较大;剪切频率较大则会降低高频抗干扰能力;3、相角裕度太小会影响系统的稳定性,使单位阶跃响应的超调量较大;4、高频段是-20dB/dec,抗干扰能力差;将U(U)=UUUU =UUU,U U(U)=UU U=UU代到未加补偿器的开环传递函数中;则U U(U)=U UU(U)U U(U)U(U)U U(U),其中U U(U)=U未加补偿器的开环传递函数如图三. Boost闭环控制设计闭环控制原理输出电压采样与电压基准送到误差放大器,其输出经过一定的补偿后与PWM调制后控制开关管Q的通断,控制输出电压的稳定,同时还有具有一定的抑制输入和负载扰动的能力;令PWM的载波幅值等于4,则开环传递函数为Fs=GvdsHsGcs补偿网络的设计使用SISOTOOL确定参数原始系统主要问题是相位裕度太低、穿越频率太低;改进的思路是在远低于穿越频率fc处,给补偿网络增加一个零点fZ,开环传递函数就会产生足够的超前相移,保证系统有足够的裕量;在大于零点频率的附近增加一个极点fP,并且为了克服稳态误差大的缺点,可以加入倒置零点fL,为此可以采用如图4所示的PID补偿网络;根据电路写出的PID补偿网络的传递函数为:UU (U)=UUU(U+UU U)(U+U UU)(U+UU U)式中:U UU=−U UU UU+U UU ,U U=UU UU U U,U U=UU U U U,U U=U UU+U UUU UU U UU U U在此我们通过使用Matlab中SISOTOOL工具来设计调节器参数,可得:零点频率U U=U.UUUUU极点频率U U=UUUUUU倒置零点频率U U=UUUUU直流增益U UU=U.UUUU首先确定PID调节器的参数,按设计要求拖动添加零点与极点,所得参数如图加入PID之后,低频段的增益抬高,稳态误差减小,如图闭环阶跃响应曲线如下图幅值裕度为:GM=,相角裕度:PM=°,截止频率:fc=10KHz高频段f>fp,补偿后的系统回路增益在fc处提升至0dB,且以-40dB/dec的斜率下降,能够有效地抑制高频干扰;计算补偿网络的参数由sisotool得到补偿网络的传递函数为:G C (s)=2784.7×(1+0.0001s)(1+0.00027s)s(1+2×10−7s)由前面可有补偿网络的传递函数为:UU (U)=UUU(U+UU U)(U+U UU)(U+UU U)对比两式可得,假设补偿网络中 Ci=1μF依据前面的方法计算后,选用Rz=270,Rp=,Rf=,Cf=;四.修正后电路PSIM仿真1额定输入电压,额定负载下的仿真电压响应如下图电压稳定时间大约为2毫秒,稳定值为220V,超调量有所减少,峰值电压减小到了260V.稳定后的电压纹波如下图电压纹波大约为电流纹波如下电流纹波大约为验证扰动psim图2额定输入电压下,负载阶跃变化0-3KW-5KW-3KW电压响应曲线如下图电压调节时间大约1ms,纹波不变大约为;由此可见,输出电压对负载变化的反应速度很快且输出电压稳定;电流响应曲线如下图3负载不变3KW,输入电压阶跃变化48-36V输入电压从48V变到36V时的电压响应如下图输出电压的局部放大图像如下图由上图可知,输出电压调节时间大约为1ms,而且稳压效果好;五.设计体会通过BOOST变换器的设计,可以看出闭环控制的稳压及抑制干扰的作用;在设计补偿电路可用sisotool电路特性进行修正,从而得到较为理想的幅值裕度、相角裕度和闭环阶跃响应,从而提高PID的调节性能;。
基于Pid Fuzzy控制Boost电路的设计以及MATLAB仿真

用Pid Fuzzy控制Boost电路专业:电气工程学号:********姓名:11111111_Boost升压电路的Pid及Fuzzy控制及仿真111111111摘要:随着现代科学技术的快速发展,电力电子技术在军事、工业、民用中都得到了广发的应用,尤其是依托于电力电子技术的开关电源更是突飞猛进;本文简单论述了用Pid Fuzzy控制Boost电路的方法,文中没有对信号模型的化简计算等做过于详尽的分析,主要是学会作为研究生遇到问题时,如何查找资料、整理思路解决问题,以及如何撰写论文,为以后的科学研究工作打下基础。
关键词:Boost;Fuzzy;Pid;升压电路一、作业目的1.学习Boost电路的基本原理,学习MATLAB在电力电子技术中的应用。
2.掌握Pid控制及其调节机理,了解Fuzzy控制器的设计过程及基本工作原理。
3.掌握解决问题的基本步骤以及如何撰写论文。
二、仿真电路要求指标1.输入电压Ui :20V—95V;输出电压Uo:100V;满载输出电流Io=18A2.纹波:Vripple ≦1%Io=18A3.效率:Ui=75V时η≧954.负载切换时输出电压Uo 纹波要求:满载切半载、半载切1/10载时Vripple≦1%;满载切1/10载时Vripple≦5%5.自定义参数:开关频率f=100KHz三、参数计算、电路设计及仿真模拟1.参数计算1)电阻R的计算由输出电压Uo =100V,输出电流Io=18A得满载电阻R=OOUI=5.5562)电感L的计算由已知条件输入电压20V —95V ,输出电压U o =100V 得占空比:0.8~0.05D =Boost 升压电路的临界电感方程:2R =D -D T 2L (1) 对上式求导得1D=3处有最大值又0.05<D<0.8满足要求223R 5.5561=D -D T=-=4.1uH 22100L ⨯10(1)0.33(10.33) 考虑到电感预量取 L=10uH3) 电容C 的计算由o c o V D TQ U ==C RC∆∆得o c o I D T C=U ∆考虑到电流连续电流和占空比均取最大值 o c 3o I D T 180.8C===144uF U 10010⨯∆⨯ 考虑到电感预量取 C=500uF2. Boost 主电路及Pid 的设计1) 主电路图2-1图2-1 Boost 主电路拓扑上图中各器件均的内阻都很小,可以看成是理想器件2)Pid控制Boost电路拓扑[2]图2-2图2-2 Boost电路的Pid闭环控制系统模型3)Boost电路的Pid闭环控制系统传递函数整定图2-3VrefE(s) V(s)参考信号B(s)反馈信号 V o(s)图2-3 Boost电路的Pid闭环系统框图由上图得到传递函数的关系如下:C(s)G(s)E(s)=G(s)G(s)G(s)E(s)c m vd=(s)H(s)C(s)B=E(s)=R(s)-B(s)上式子中:vdG(s):Boost电路开关MOSFET到书输出V O的传递函数G(s)m:PWM脉宽调制器的传递函数H(s):反馈回路的传递函数G(s)c :为补偿网络的传递函数G c(s)G m(s)G vd(s)H(s)4) 传递函数的计算以下参数整定参考徐德红的《电力电子建模及控制》一书中的第四章节(DC/DC 变换器反馈控制设计) i.H(s):H(s)为反馈传递函数,Boost 的输出电压稳定在100V ,所以用100V 作为参考电压,计算式子为(s)100H(s)=1(s)100ref o V V == ii.G (s)m :G (s)m 为脉宽调制波形的传递函数,本例中采用幅值为1m V v =的三角波作为脉宽调制信号,三角波的频率为100kHz11m V Vm== iii.G (s)vd :所参考书目中,在不考虑电感电容电阻的情况下,即将Boost 主电路模型做小信号分析处理得到Boost 主电路由MOSFET 开关的输入到输出的传递函数为1in 2211(1s)V G (s)=(1)L LC R vd RC LCD s s -⨯-++ 式中:2(1D)LL =-R =OOU I =5.556Ω负载电阻的电阻值 C=500uF 输出电压滤波电容值100750.25100o m o V V D V --===(输入电压定位75V ) 将L R C D 带入公式中:6226910100.75 5.556920.7515.55650010 5.010(1s)75G (s)=5.010vd s s ---⨯⨯-⨯⨯⨯-⨯⨯++104291.510 4.810360 1.12510s s s ⨯-⨯=++⨯3. Pid 控制器补偿函数G (s)c 的计算以及调节1) Boost 的伯德图分析将G (s)vd 104291.510 4.810360 1.12510ss s ⨯-⨯=++⨯输入MATLAB 得到校正前系统的Bode 图3-1图3-1 校正前系统Bode 图对于闭环系统的特征方程式(s)1G(s)H(s)0F =+=我们知道如果系统传递函数有极点在虚轴上或是在s 平面的右半边,则系统为不稳定系统,而特征方程式G(s)H(s)中包含了所有闭环极点的信息,因此可以通过分析G(s)H(s)的特征全面把握系统的稳定性,G(s)H(s)包含了从误差信号(s)E 到反馈信号B(s)之间回路中各个环节的全部传递函数,G(s)H(s)称为回路增益函数,(s)=G(s)H(s)(s)B E =反馈信号误差信号。
BOOST电路pid和fuzzy闭环控制仿真讲课稿
1.设计要求(1)输入电压范围为50-98V ,输出电压为100V ,额定负载下输入电流20A ;(2)纹波(峰峰值)不超过1%; (3)在75V 输入条件下效率大于96%。
2.boost 电路拓扑和各参数值电感参数计算:选定输入电压为75V 来计算各参数,此时稳态占空比为0.25,输出电压为100V ,开关频率为100KHz 。
为保持输出电流连续,设电容电流增量为I oc ,应有I oc <I om ax ,其中2)1(2D D LTU I ooc -= 2)1(202L D D TU o-⨯≥代入可求得电感值为H L μ52.375.025.02021001025=⨯⨯⨯≥-。
在仿真中,为了保证电感电流续流,我们取H L μ20=。
电容参数计算:电容的选择主要是考虑纹波小于1%,即1V ,根据boost 电路的纹波计算公式:RCDTU o o =∆U可以推出H R U DT U C o o μ50105.01025.01005=⨯⨯⨯=∆=-在仿真中,为了确保输出电压纹波小于设定值,C 取H 500μ。
3.PID 控制器的boost 电路仿真用PID 控制器控制的闭环boost 电路的原理图如图3.1所示图3.1 PID 控制的闭环boost 电路原理图经过小信号建模可得开环传递函数为2'22'')/()1()(Ds R L LCs R D sLU D s G o vd ++-= 代入数据可得11056.31078.1s 1074.434.13375.0)10/1020(105001020)1075.010201(10075.0)(62842626626+⨯+⨯⨯-=+⨯+⨯⨯⨯⨯⨯⨯⨯-⨯⨯=-------s s s s s s G vd在matlab 中输入下面的程序作出bode 图3.2 num=[-4.74e-4 133.34]; den=[1.78e-8 3.56e-6 1]; margin(num,den);图3.2 开环系统bode 图由图可知,系统的幅值裕度为dB GM o 5.42-=,相位裕度为4.170-=γ,剪切频率为s rad /109.84c0⨯=ω。
boost电源报告
利用经典PID 与FUZZY 控制方式设计BOOST 开关电源并在MATLAB 进行仿真一、设计仿真目的:1、通过学习boost 电路在Simulink 中的仿真,熟悉MATLAB 的应用2、通过PID 的控制方式及参数调整,更深入了解PID 控制3、应用新学的FUZZY 控制方式,理解FUZZY 控制的特点,做到学习与应用的结合4、通过仿真进一步深化对电力电子知识的掌握 二、指标及其要求:1、输入电压Vin=20V 至95V ;2、输出电压Vo=100V ,输出电流Io=18A ;3、纹波Vripple ≤1V ;4、效率η≥95%;5、负载调整率≤1%;6、负载切载率≤5%。
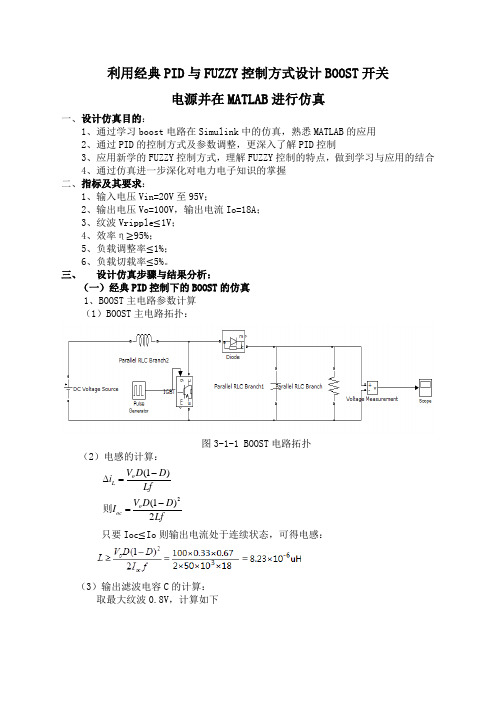
三、 设计仿真步骤与结果分析:(一)经典PID 控制下的BOOST 的仿真 1、BOOST 主电路参数计算 (1)BOOST 主电路拓扑:图3-1-1 BOOST 电路拓扑(2)电感的计算:2(1)(1)2o L o oc V D D i LfV D D I Lf -∆=-=则只要Ioc ≤Io 则输出电流处于连续状态,可得电感:(3)输出滤波电容C 的计算:取最大纹波0.8V ,计算如下2、BOOST闭环PID的MATLAB仿真(1)在Simulink中搭建好BOOST电路的仿真模型,使用开关器件是MOSFET,其开关频率选用50kHz,电感电容分别由上述公式计算得到,电路临界电感为8.23uH,临界电容为360uF。
PID闭环如图3-1-2所示。
图3-1-2 BOOST闭环PID模型(2)BOOST电路闭环PID参数的设计求解过程I、BOOST电路的PID闭环系统框图如图3-1-3所示。
o图图3-1-3 BOOST电路的PID闭环系统框图其中:Gc(s) :补偿校正的传递函数;Gm(s) :三角波的传递函数;Gvd (s) :BOOST主电路由MOSFET的输入到输出的传递函数;H(s) :反馈回路的传递函数;Gvs (s) :BOOST主电路由输入Vin到输出Vo的传递函数;Z:负载阻抗。
BOOST电路pid和fuzzy闭环控制仿真
精心整理1.设计要求(1)输入电压范围为50-98V,输出电压为100V,额定负载下输入电流20A;(2)纹波(峰峰值)不超过1%;(3)在75V输入条件下效率大于96%。
2.,输电路的在仿真中,为了确保输出电压纹波小于设定值,C取H500μ。
3.PID控制器的boost电路仿真用PID控制器控制的闭环boost电路的原理图如图3.1所示图控制的在o 0s rad /109.84c0⨯=ω。
下面进行超前PD 校正,使前向通道传递函数满足 45>γ。
超前PD 校正装置传递函数是超前PD 校正装置增加的相角为 则有设定超前PD 校正后的剪切频率为1/5的开关频率,即剪切频率为20kHz ,再由公式 得s rad c /1026.15'⨯=ω。
令超前s rad c /1026.1⨯=,在图3.3中找出在频率51026.1⨯处的幅值,由于在图中1.26不好选定,就选出一个大致的1.17来参考,可以看出在'c ω不加k 校正后系统的幅值大概为dB L c 4.9)('=ω,加上k 后应该有可以算出k 为0.339。
所以超前PD 校正装置为在matlab 中运行下面程序看经过超前校正后的bode 图3.4: num=conv([1.529e-50.339],[-4.74e-4133.34]); den=conv([1.396e-61],[1.78e-83.56e-61]);加PI PI 特性,因此PI 校正主要对系统低频起作用,根据经验可知11.0c ωω≤,这里取s rad /1000=ω。
得到PI 环节为最后根据实际仿真波形对PD,PI 各环节参数进行微调,最后确定 4.系统仿真Matlab系统仿真图如图4.1所示图4.1matlab系统仿真图在50V输入条件下,对系统进行仿真,得到仿真图4.2图4.2(a)50V输入电压下系统的输出图输入在75V图75V输在98V图4.4(b)98V输入电压下输出的纹波上面这几个图能看出,输入电压变化时,波形很稳定,三个波形都差不多,超调大概在10%左右,稍微有点大,纹波比较小,在0.1V以内。
一种Boost变换器的闭环控制策略及其仿真

流型控制模型 , 它是在上述电压型控制方法的基础上 , 通过检测 电感的峰值 电流引入 电流内环控制 , 从 而实 现双 环控 制 。 由于 峰值 电感 电流 容 易检 测 , 制 环 易 于 设 计 , 对输 人 电压 的变 化 的动 态 响应 很 控 且
快 , 是对 负载 的突变 响应速 度没 有显著 提 高 , 图 6 图 7所示 。 但 如 、
1 B ot 换 器 的模 型 o s变
Bot os电路 的基本拓 扑结构 如图 1 所 示 , 是一 种 输 出直 流 电压 平均 值 U 高 于输 入 电压 V 的单 a 它 。 m . 管不 隔离直流变换 器 , 主要特点是 储能 电感 L在输 人侧 , 其 又称 升压 电感 , 电感 电流 连续 时 ,os变 当 B ot 化器存 在两种工作 状态 如 图 2 、 , 2 b C图 b为开关管 s导通 时的等效 电路 , 2 图 c为开关 管 s截止 时 的等效
[ 关键词 ] B ot os 变换器 ; 闭环控 制;SM; P I 仿真
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
精心整理1.设计要求
(1)输入电压范围为50-98V,输出电压为100V,额定负载下输入电流20A
(2)纹波(峰峰值)不超过1%
(3)在75V输入条件下效率大于96%
2.boost电路拓扑和各参数值
电感参数计算:选定输入电压为75V来计算各参数,此时稳态占空比为0.25,输
出电压为100V,开关频率为100KHZ
为保持输出电流连续,设电容电流增量为I oc丄应有[ocjomax,其中
代入可求得电感值为"兽。
遍。
.75—3.52闭。
在仿真中’为了保证电感电流续流,我们取L =20阳。
电容参数计算:电容的选择主要是考虑纹波小于1%即1V,根据boost电路的
纹波计算公式: 可以推出
在仿真中,为了确保输出电压纹波小于设定值,C取500阳。
3.PID控制器的boost电路仿真
用PID控制器控制的闭环boost电路的原理图如图3.1所示
闭环boost 电路原理图
经过小信号建模可得开环传递函数为 代入数据可得
在matlab 中输入下面的程序作出 bode 图3.2 .
num 二[-4.74e-4133.34]; den 二[1.78e-83.56e-61];
marg in(nu m,de n);
—
I
图3.2开环系统bode 图
由图可知,系统的幅值裕度为GMo=T2.5dB ,相位裕度为%=-17.4°,剪切频率为
4
豹 co = 8・9 X 10 rad / s 。
F 面进行超前PD 校正,使前向通道传递函数满足Y >45 :
超前PD 校正装置传递函数是
超前PD 校正装置增加的相角为 则有 设定超前PD 校正后的剪切频率为1/5的开关频率,
bode
%rK5 KLC Unamzhl
-1=0— Vo
ReldKTj al
OpefBlc
Saturation
FID Cort —RD{S) •
R
护迫函 ffl
图3.1 PID 控制的
hosfe ^
-- —nyytp-*
X
&erte £ RLC
即剪切频率为20kHz,再由公式得《c =1.26x105rad /s。
令超前PD校正装置⑷m=B c,校正装置的转折频率为
可以求出得到校正不含增益的校正装置现在算增益K值,用上式校正装置对系统进行校正,程序如下:
num二co nv([4.511e-51],[-4.74e-4133.34]);
den二co nv([1.396e-61],[1.78e-83.56e-61]);
marg in(nu m,de n);
运行程序得到I bode图如图3.3所示:
I
图3.3用不含增益的超前PD校正装置校正的系统bode图
加上校正装置的系统k值后,系统的穿越频率应为设定的频率叽=1.26X105rad /S,
在图3.3中找出在频率1.26勺05处的幅值,由于在图中1.26不好选定,就选出一个大致的1.17来参考,可以看出在纵不加k校正后系统的幅值大概为L(轨)=9.4dB,加上
k后应该有
可以算出k为0.339。
所以超前PD 校正装置为
在matlab 中运行下面程序看经过超前校正后的 bode 图3.4: num 二co nv([1.529e-50.339],[-4.74e-4133.34]);
den 二 co nv([1.396e-61],[1.78e-83.56e-61]);
marg in(nu m,de n);
图3.4超前校正后系统的bode 图
可以看出进行超前校正后
相角裕度:
经验证,超前PD 校正为有差校正,稳态后并非达到100V,为了减小系统的静差,增 加PI 校正环节。
PI 环节的传递函数为
由于PD 校正已经将系统校正为稳态系统,故 PI 校正不应影响到系统中的中高频 特性,因此 PI 校正主要对系统低频起作用,根据经验可知
©=1000rad/s 。
得到PI 环节为
最后根据实际仿真波形对PD,PI 各环节参数进行微调,最后确定
4. 系统仿真
幅值裕度: GM =7.51dB
剪切频率: % =1.26x105
rad /s 一
尬
<0.1%1,这里取
Matlab 系统仿真图如图4.1所示
图4.1matlab 系统仿真图
在50V 输入条件下,对系统进行仿真,得到仿真图
4.2
图4.2 (a ) 50V 输入电压下系统的输出
1002
■图 4.2(b)50V 输入
电压下输出的纹波
图4.4( a )98V 输入电压下系统的输出 图4.4( b )98V 输入电压下输出的纹波
上面这几个图能看出,输入电压变化时,波形很稳定,三个波形都差不多,超调 大概在10%E 右,稍微有点大,纹波比较小,在 0.1V 以内。
5. fuzzy 控制器的boost 电路仿真
100
9918
图 4.3( b )75V 输
在75V 输入条件下,对系统进行仿真,得到仿真图
4.3
在98V 输入条件下,对系统进行仿真,得到仿真图
4.4。
用fuzzy控制器控制的boost闭环电路图如图5.1所示。
图5.1fuzzy控制器控制的闭环boost电路原理图
本系统的模糊控制器采用二输入-一输出,变量的模糊集论域都选择为[-1,1],采用常用的三角形隶属度函数。
在matlab中建立fuzzy文件,两输入分别为误差E和误差变化量EC
图5.2matlab建立fuzzy文件
对于输入和输出量都分别用NB,NM,NS,Z, PS, PM, PB t个变量来描述,各个变量的隶
属度函数如图5.3所示。
图5.3( a)输入变量E的隶属度函数
图5.3 (b)输入变量EC的隶属度函数
图5.3(c)输出变量的隶属度函数
接着根据专家经验和系统的偏差类型确定规则库,规则库设计如表
1所示
表1fuzzy控制器的规则库
将隶属度函数与规则库输出fuzzy文件,得到控制器。
在调试中,需要调节的是
误差E和误差EC的增益,以使fuzzy控制器的输入量落在设定的域中,加限幅是为
了防止输入量突然增大对输出的影响。
在纯fuzzy控制器作用下,主电路在输入电
压偏大或偏小时输出会出现静差,为了使输出电压稳在设定的100V,在主电路的输
出与输入之间加上一个积分环节。
令boost电路的输入电压分别为50V,75V,98V,输出波形如下图所示。
图5.4( a)50V输入电压下系统的输出
图5.4( b)50V输入电压下的纹波
图5.5( a)75V输入电压下系统的输出
图5.5( b)75V输入电压下的纹波
图5.6 ( a) 98V输入电压下系统的输出
图5.6( b)98V输入电压下纹波
从波形图可以看出,fuzzy控制器很好的满足了要求,没有什么超调,纹波也小。
6.总结
通过本次的大作业,学习到了很多东西,首先是对软件有了进一步的了解和熟悉, 对matlab的simulink模块和fuzzy控制器有了更深的了解,提高了通过仿真波形分析问题的能力,从有很多小问题到慢慢能出波形,再到最后波形的调试这个过程
都是很值得体会的,里面有很多有趣且有用的东西。
另外,PID的仿真将自动控制原理和电力电子技术结合在一起,对整个仿真都有了更深的认识,使我更加进精心整理
受到了学科间关系和关联,促进了知识的融会,增强我对所学知识的运用能力,提 高了思考问题和解决问题的能力。
而 fuzzy 的仿真让课堂上学的知识来学以致用, 加深了我对课堂上知识的理解,对模糊控制也有了一个更深层次的了解。
这次大作 业收获还是挺大的。
最后,特别感谢XX 师哥和师姐耐心的讲解和解答,也感谢 XXX 老师课上的精心指 导。
参考文献
[1]徐德鸿,电力电子系统建模及控制,机械工业出版社,
2006
[2]林飞,杜欣,电力电子应用技术的 MATLAB^真,中国电力出版社,2009
张德丰.Matlab 模糊系统设计•北京:国防工业出版社,2009 席爱民,模糊控制技术,西安电子科技大学出版社, 2008
[3]
胡寿松,自动控制原理,科学出版社,2001 [4] [5]。