747自动驾驶系统
大韩航空007号班机之死

大韩航空007号班机之死美国《空军杂志》2013年第1期发表了彼得•格里尔的文章:The Death of Korean Air Lines Flight 007。
文章指出,前苏联空军击落大韩航空007号班机事件震惊世界,其中的真相美、苏各执一词,一直扑朔迷离。
本文作者基于前苏联的解密档案以及国际民航组织的调查报告做出了权威论断。
文章编译如下:一架从美国飞往韩国首尔的“波音”747客机误入前苏联领空。
前苏联击落了它。
随着决定命运的时刻即将到来,根纳季•奥西波维奇(Gennadiy Osipovich)少校在紧张的同时,又有点沮丧。
这是1983年9月1日的一个清晨,现在对于奥西波维奇可不是一个轻松的时刻,奥西波维奇是一名苏-15战斗机飞行员,在前苏联的多林斯克索科尔空军基地(Dolinsk-Sokol Air Base)服役,该基地位于日本北部的萨哈林岛/库页岛(Sakhalin Island)上。
在他飞机的前方几千米处,有一个目标若隐若现,他一直在试图锁定这个目标。
但运气不好,一直没有成功,一方面是因为前苏联的跟踪雷达产生的数据不准确;另一方面,他和其他速成的飞行员一样,一直慢的离谱。
现在目标飞越萨哈林后即将离开前苏联领空,萨哈林岛是一个敏感的军事禁区。
奥西波维奇通过无线电向上级请求指示,但没有获得即时回应。
一次臭名昭著的行动他可以看到这架神秘的多引擎飞机闪烁的灯光,很显然,这架飞机不知道他的存在。
突然间,它减缓了速度开始向上爬升。
奥西波维奇的空战管制员下令他开火。
苏-15战机突然加速,迅速到达了应该被摧毁飞机的旁边。
根据美国政府公布的通信文字记录,奥西波维奇通过无线电激动说:“授权来得太晚了,本来应该更早。
……我已经正横对目标。
”前苏联飞行员转向使机首低于他笨拙的猎物。
然后,他拉起机首,启动了加力燃烧装置,并用雷达锁定了目标。
东京时间上午3点26分,他发射了两枚AA-3“阿纳布”空对空导弹。
其中一枚近信引炸导弹,在目标的后面爆炸,切断了至关重要的控制线。
波音747设计方案

波音747设计方案波音747设计方案是一款具有巨大载客量和远程航程的大型喷气式客机。
它是上世纪60年代波音公司为了满足全球航空市场对大型远程客机的需求而设计的一款划时代的飞机。
波音747的设计方案包括以下几个重要的方面:1. 巨大的载客量:波音747可容纳400多名乘客。
其设计采用了宽敞的客舱空间和多层客舱结构,能够提供更大的座位数量,满足航空公司对高利润率的需求。
2. 远程航程:波音747的设计方案使得它具备了较长的航程能力,能够满足跨洲际的长途飞行需求。
这主要得益于其大型燃油舱设计,可携带更多的燃油,延长了飞机的飞行时间。
3. 先进的航空技术:波音747采用了许多先进的航空技术,包括涡轮风扇发动机、全玻璃座舱和自动驾驶系统等。
这些技术的运用提高了飞机的性能和操作便利性,减少了飞行员的工作负担和飞机的维护成本。
4. 安全性和舒适性:波音747的设计方案注重乘客的舒适性和飞行的安全性。
它采用了先进的气动外形设计,使得飞机具有较高的飞行稳定性和降低的阻力,减少了飞机在起飞和降落过程中的震动和噪音。
此外,它还配置了现代化的座椅和舱内娱乐系统,提供了更舒适和愉悦的飞行体验。
5. 可持续发展:波音747的设计方案也考虑到了环境保护和可持续发展的需求。
它采用了节能和减排技术,如先进的燃油喷射系统和降噪设备,减少了飞机对环境的影响。
总结起来,波音747的设计方案是一项在航空工程领域具有重要意义的举措。
它不仅满足了当时全球航空市场对大型远程客机的需求,还体现了波音公司对航空技术发展和乘客舒适性的关注。
它的成功造就了波音747的经典地位,为后续大型客机的设计和发展奠定了基础。
PMDG747简明操作范例

PMDG747简明操作范例写在前面首先申明本范例针对的对象是有一定基础,能够完成默认大型客机起降而对插件飞机不甚了解的玩家。
高手就不用浪费时间了,当然能给予指教也是欢迎的。
本范例完全站在新手的角度,介绍了PMDG747飞机从起飞到降落完整过程的最简要操作过程。
既然是最简要操作过程,就不包括冷仓启动等内容,飞行时不联系ATC,很多操作也并不符合真实的航空规范。
毕竟新手在面对比默认机复杂的多的PMDG747,将其顺利飞起,并安全降落,从中培养兴趣才是最重要的。
本范例使用的航路从上海虹桥机场(ZSSS)到北京首都机场(ZBAA)。
使用的航线如下:ZSSS SID VMB A593 VYK STAR ZBAA该航路表明:飞机从虹桥(ZSSS)起飞,经过离场程序,到达VMB导航点,从VMB 导航点上A593航路,最终到达VYK航点,然后通过进场程序到达北京机场(ZBAA)。
1.起飞前操作进入FS后,选择PMDG747飞机,从虹桥机场起飞并直接停在跑道35上,在Loading 之后,我们首先看到的是PMDG747的2D驾驶舱,起飞前操作如下:⑴设置起飞所用的油量。
PMDG并非使用FS默认的油量管理系统,而是采用自己的一套工具,按 ALT 键打开FS上方菜单,选择PMDG->General->Options选项,跳出图1所示的窗口:图1 油量设置在弹出的窗口中,首先点击Fuel选项,然后选择油量,由于此次飞行上海到北京距离只有1000Km多,因此只要图示的值就可以了。
最后点击下方的Apply Now按钮。
⑵将MCP(图2的东西就是MCP)上自动油门开关A/T和飞行引导开关FD打开。
图2 MCP面板⑶通过快捷键shift+8打开仪表板,将auto break按钮打到RTO,自动安全带指示和自动吸烟指示自动,进行TCAS测试(防撞系统,AI机靠近时起报警),测试通过后打开TCAS。
图3 shift+8仪表⑷通过快捷键shift+2打开顶板,最下面一行为机上各个灯光开关。
P3D PMDG 波音747客机 中文指南 8.4进近

最后进近421.最后进近1500英尺后,放下起落架。
2.将襟翼操纵杆设置为30度3.Arm装备速度制动器(您可以单击控制杆旁边的ARMED text装备文本)4.将MCP速度设置为VREF+5(137+5)kts(速度带上显示)。
换言之,将自动驾驶仪MCP SPEED设置为142。
5.着陆将使用Autoland自动着陆(LAND3)完成。
•当在400英尺飞行时,自动驾驶仪将切换到LAND着陆模式,以便将飞机设置在适当的高度和姿态,以适当地闪光。
•在50英尺高度飞行时,自动驾驶仪将切换到闪光模式,以便使VREF+5速飞机灯闪光,从而平稳着陆。
•接地时,自动驾驶仪将切换到ROLLOUT卷展模式。
此模式将使飞机保持在跑道中心线上。
VREF速度5注:如果由于某种原因,你决定改为人工着陆,一个好的程序是断开自动驾驶仪开关和自动油门开关,并跟随飞行指引仪通过人工飞行到达跑道。
然后目视降落飞机。
不要跟随飞行指导仪着陆:他们的设计不是为了提供超过这个DH(决策高度)的精确设计。
33142 ARM text 装备文本(点击点)156 11571.当你听到一个声音提示“MINIMUMS最低”,这意味着你已经达到了你的最低决策高度。
你现在已经准备好着陆了。
2.在20英尺处,稍微向上拉以降低下降速度3.在10英尺处,油门回到怠速4.在着陆时,将鼻子推入地面以改善与跑道的粘附性并使刹车最大化(自动刹车系统已经为你制动)158159。
大韩航空007号班机之死
大韩航空007号班机之死美国《空军杂志》2013年第1期发表了彼得•格里尔的文章:The Death of Korean Air Lines Flight 007。
文章指出,前苏联空军击落大韩航空007号班机事件震惊世界,其中的真相美、苏各执一词,一直扑朔迷离。
本文作者基于前苏联的解密档案以及国际民航组织的调查报告做出了权威论断。
文章编译如下:一架从美国飞往韩国首尔的“波音”747客机误入前苏联领空。
前苏联击落了它。
随着决定命运的时刻即将到来,根纳季•奥西波维奇(Gennadiy Osipovich)少校在紧张的同时,又有点沮丧。
这是1983年9月1日的一个清晨,现在对于奥西波维奇可不是一个轻松的时刻,奥西波维奇是一名苏-15战斗机飞行员,在前苏联的多林斯克索科尔空军基地(Dolinsk-Sokol Air Base)服役,该基地位于日本北部的萨哈林岛/库页岛(Sakhalin Island)上。
在他飞机的前方几千米处,有一个目标若隐若现,他一直在试图锁定这个目标。
但运气不好,一直没有成功,一方面是因为前苏联的跟踪雷达产生的数据不准确;另一方面,他和其他速成的飞行员一样,一直慢的离谱。
现在目标飞越萨哈林后即将离开前苏联领空,萨哈林岛是一个敏感的军事禁区。
奥西波维奇通过无线电向上级请求指示,但没有获得即时回应。
一次臭名昭著的行动他可以看到这架神秘的多引擎飞机闪烁的灯光,很显然,这架飞机不知道他的存在。
突然间,它减缓了速度开始向上爬升。
奥西波维奇的空战管制员下令他开火。
苏-15战机突然加速,迅速到达了应该被摧毁飞机的旁边。
根据美国政府公布的通信文字记录,奥西波维奇通过无线电激动说:“授权来得太晚了,本来应该更早。
……我已经正横对目标。
”前苏联飞行员转向使机首低于他笨拙的猎物。
然后,他拉起机首,启动了加力燃烧装置,并用雷达锁定了目标。
东京时间上午3点26分,他发射了两枚AA-3“阿纳布”空对空导弹。
其中一枚近信引炸导弹,在目标的后面爆炸,切断了至关重要的控制线。
PMDG747完整带飞教程
PMDG747完整带飞教程声明:1、本教程只适用于模拟飞行,切莫在真实飞行中使用2、此为文本版,与其他任何形式的视频版无任何关系。
若需要转载或引用此文本版,请注明出处。
3、2606主编,7478协助修改,未经许可,不得转载!在开始设置飞机之前,请到/file/c4j82jnp#(提取码:c4j82jnp)下载PMDG747的冷舱文件。
文件下载后放到FS主目录的PMDG\747400\PanelState目录下。
本次教程是从香港赤腊角机场(VHHH)到广州白云机场(ZGGG)从VHHH 07L跑道起飞,ZGGG 02R跑道降落为了方便,我们直接把飞机停在VHHH的07L跑道上,但是在实际和连飞中都是不允许的。
具体航路参照:/info/index.php?id1=vhhh&id2=zggg&ran d=0#down打开链接后,找到:点击PMDG747,打开右键“点击下载”目标另存为。
把文件下载放到FS目录下PMDG>FLIGHTPLANS第一次使用PMDG744的话,有些地方需要设置,不然后续有些地方会与教程不符,具体如下:1.像刚刚载入冷舱时,在工具栏找到插件>PMDG>Options(注意!与载入冷舱文件不同,这次要打开的是Options)打开后是这个面板找到看到把红色箭头的地方勾上。
然后找到最下面的看到这里把红色箭头的两个地方勾上。
本文说明:1.本人的游戏版本是FSX英文版,有某些操作可能跟FS2004或者FSX的中文版有不同,具体请参照自己的版本2.冷舱的意思是飞机完全关闭的状态。
3.因为本机型是747-400,所以简称744。
4.PMDG 747 机模的很多旋转开关,都支持鼠标左右键点击旋转,往左旋点鼠标左键,往右旋点鼠标右键。
5.PMDG744的很多面板可以通过使用快捷键或者位于驾驶舱视角的顶部功能栏打开,使用快捷键就是通过按键盘Shift+数字键1~9打开;使用功能栏就是通过这个打开(这个必须是F10视角才能看见,如果在F10视角没看见,就点击F10视角中窗口的中部就能打开或关闭)(以后如果文中提及打开某某面板,请参照这一说明)6.本教材使用的是PMDG744载客型,如果你发现顶板的某些部分与本教程不同,证明你选择的是载货型。
好波音747 全机中文教程

波音747-400全机中文教学(本教学共分50节)(一)747-400机舱分布-------------------------------------------------747-400 内部基本上分成三层 : 上层客舱 (Upper Deck), 主客舱 (Main Deck) 及底舱(Lower Lobe).让小蟹带着大家从头到尾, 由上而下逛一趟飞机.雷达罩 : 里头有个大大的雷达天线, 所以如果荷苞扁扁, 只能坐后面经济舱时, 也不必羡慕坐前头的人.驾驶舱 : 飞行员就是在这里开飞机的.飞行员休息室 : 一趟美国航线飞下来十几个小时, 飞行员怎么受的了?当然要休息了, 不过放心, 机上有两组飞行员在轮替, 不会就放着让飞机自己飞上层客舱 : 有楼梯及电梯通到底下的主客舱, 不过你只能走楼梯, 电梯是运货用的主客舱 : 每边各有五个门,由前到后编号各为 1, 2, 3, 4, 5, 恰把主客舱分为五个区 (Zone), 称为 A, B, C, D, E区.空服员休息室 : 别想了, 要有钥匙才能进去的啦 !主电子舱 : 放了好多电子设备, 可以说是飞机的神经中枢.另外还有中部电子舱及后部电子舱, 不过都不大, 就略过不去了.前货舱 : 内有电动滚轮, 可以快速上下货, 可装五个 96 x 125 吋的标准货盘.油箱 : 747-400 的油都装在翅膀里,就是因为主翼结构通过这里, 所以货舱 才会分成前后两部份.后货舱 : 与前货舱相似但较小, 只能装四个 96 x 125 吋的货盘.散货舱 : 由于机身在此开始往后渐缩, 只能装一些散货或行李等.(二)駕駛艙配置-------------------------------------------------驾驶舱内部共有四个座位 :1 : 正驾驶 (Captain)2 : 副驾驶 (First Officer, Co-Pilot)3 : 第一观察员 (First Observer)4 : 第二观察员 (Second Observer)正, 副驾驶是负责开飞机的人, 而第一, 二观察员可能是教官, 考核员, 学员或其它随行人员, 并不负责操作飞机.上图是 747-400 驾驶舱内的照片 ,下图则是用来介绍各面板名称的简图, 请大家互相参照.P461 : Pilots Maintenance包括液压, 电力的切断开关, CVR 控制面板, 灭火瓶测试面板等, 飞行中很 少用到, 倒是维修人员在地面比较常用.P7 : Overhead Circuit Breaker一大堆机上仪电系统的断电器 (功能类似保险丝).P5 : Pilots overhead机上主要系统 (燃油, 电力, 液压, 供气... )的操作, 都由此控制.P10 : Automatic Flight Control自动驾驶系统的控制面板, 及飞行员仪表显示的控制钮.P72 : Pilots Glareshield驾驶舱内灯光的控制.P1 : Captains Main Instrument正驾驶的仪表板, 有两个多功能显示屏.P2 : Pilots Center Instrument有一显示屏显示发动机主要运转参数及系统警告, 另有些备用仪表.P3 : First Officers Main Instrument副驾驶的仪表板, 与正驾驶的类似.P9 : Forward Pilots Electronics有一显示屏用于显示次要发动机参数及系统状态图, 另有两个多功能输入面板, 用来控制飞行计算机及中央维修计算机.Control Stand发动机的油门, 以及襟翼, 扰流板都由这里控制.P8 : After Pilots Electronics控制机上大部分的通讯, 导航系统.(三)发动机概述-------------------------------------------------747-400 所使用的发动机计有 General Electric 公司出品的CF6-80C2, Pratt & Whitney 的 PW4056 , 及 Rolls Royce 的 RB.211-524G/H 三种型式可选择,底下就以 CF680C2 为例子, 向大家说明 747-400 上的发动机系统.GE CF6-80C2 发动机 :CF6-80C2 是一具推力在 57000 磅左右的涡轮风扇引擎, 主要的性能参数如下 :型号 General Electric CF6-80C2推力 57180 磅旁通比 5.15 :1N1 (100%) 3280 rpmN2 (100%) 9827 rpmMax N! 117.5 % rpmMax N2 112.5 % rpm重量 9485 磅长度 170 英吋 (432 cm)直径 100 英吋 (254 cm)至于其构造则以下图来说明 :空气由进气口进入引擎, 首先会碰到风扇叶片.其实你可以直接把风扇想成是一个很多叶片 (共 38 片) 的螺旋桨, 外头用个整流罩包起来, 整颗引擎的推力有 80% 是由风扇提供.通过风扇之后, 气流就兵分两路, 一部份从外侧的通道直接排到大气, 另一股靠近轴心的气流则进入低压压缩器 (共四级压缩叶片), 经过压缩压力提高后准备进入高压压缩器.引擎在设计时, 一般都以最大推力时的状况, 作为最佳化的考量. 但由于引擎转速随时会变化, 在低转速时, 已非最佳化的状况, 进入低压压缩器的空气流量, 往往会超过高压压缩器所能承受的流量, 这些多余的气流便会堵在高压压缩器入口, 造成进气不顺, 轻者推力降低, 振动变大, 严重的甚至造成引擎熄火. 为避免这种情况产生, 在高低压缩器之间设计有可变旁通气门 (Variable Bypass Valve, VBV), 可随着转速的降低, 逐渐打开, 将多余的气量排出.高压压缩器共有 14 级, 其中前 5 级装有可变进气导片 (Variable Static Vane, VSV), 可视进气速度及引擎转速, 调整进气导片的角度, 使进气顺畅避免产生压缩叶片失速的情况.空气经过低 -- 高压压缩器后, 压力可提高到原来的 27.4 倍, 压缩比越高引擎的效率也越好. 之后空气便进入燃烧室与燃油混合燃烧, 产生动力.燃烧室出来的空气 (或者说是废气)接着便通过高压涡轮 ( 2 级) 及 低压涡轮 ( 5 级), 之后便经过尾管排到大气中, 这部分喷射气流产生的推力, 约占总推力的 20%.其中高压涡轮与高压压缩器是装在同一根轴上, 气流吹在涡轮上, 使涡轮转动, 就可带动压缩器旋转, 产生压缩空器的功能. 低压涡轮与低压压缩器的关系也是如此 (风扇是与低压缩器装在同轴上). 因此 CF6-80C2 是一具 两轴的发动机 (Rolls Royce 的 RB.211-524G/H 则是属于三轴).对于 "风扇--低压压缩器--低压涡轮" 这根轴, 一般称为 N1 轴, 而 "高压压缩器--高压涡轮" 这根轴则称为 N2 轴. 此外对于 N1, N2 的转数, 通常都用百分比的方式来表示, 至于100% 的转速是多少, 请参考前面的引擎参数列表.至于为什么要用百分比的方式呢 ? 由于引擎最重要的功能是产生推力使飞机前进, 因此推力应该是引擎最重要的参数, 但偏偏飞机上无法量测引擎推力, 因此工程师必需找一个能代表推力的参数, 这样引擎控制系统才有一个可以参考的依据. 有些制造厂家是量测引擎 "进气--排气" 压力比 (Engine Pressure Ratio, EPR),来作为推力控制的依据 (如 Pratt & Whitney), 而 GE 则采用 N1 转速来表示推力, 这时候 , 相信 N1 : 100%, 会比 N1 : 3210rpm 的表示方法来得让人容易了解.后记除了火箭型式的推力系统外, 基本上所有飞机的推进系统都是利用旋翼原理, 不管是活塞引擎配上螺旋桨还是纯喷射引擎都是如此. 差别只在旋翼的动力来源 (活塞引擎还是涡轮), 及旋翼是否有用整流罩包围 (螺旋桨 V.S. 风扇). 从这里就可以衍生出所有型式的发动机 : 活塞引擎 (Piston), 涡轮喷射 (Turbojet), 涡轮风扇 (Turbofan), 涡轮螺旋桨(Turboprop).从空气动力学上来讲, 旋翼的直径越大, 叶片数目越多, 其效率就越好. 例如直升机的旋翼要支撑整架飞机重量, 因此造得特别大, 特别是一些大型军用运输直升机都会设计 6-7 片的旋叶.就燃烧效率来讲则是涡轮型式比活塞引擎好, 因此涡轮引擎配上大风扇, 就是最佳的搭配, 于是我们就看见新发展的引擎总是风扇越作越大, 推力及效率都会提高. 不过总体效率最好的, 其实是涡轮引擎配上螺旋桨的 Turboprop, 不过 Turboprop 的速度太慢, 并不适合长途飞行 (坐经济舱的客人可能会先抓狂 !).最后有一个问题要请大家找找答案 (我也不晓得答案) :不管螺旋桨或涡轮发动机, 都会因为自身旋转的关系, 对机身产生一个反向的转矩. 直升机为此需要尾旋翼来平衡, 二次大战的双引擎飞机有些使两边螺旋桨反向旋转, 来互相抵消. 其它的飞机, 有些是将引擎推力轴线偏移一个角度 (引擎装歪歪的 !), 有些则在飞机操纵面的配平上动手脚. 现在问题就是 :747-400 的引擎有三种选择, 其中 GE 与 P&W 的引擎是顺时针方向旋转 (从机尾往前看), R&R 则是逆时针方向旋转, Boeing 是否会对不同的发动机修改机体设计, 来消除发动机的逆转矩, 还是不管它, 由飞行员自己配平 ?(四)整合显示系统(Integrated Display System, IDS)-------------------------------------------------比起一些老飞机的驾驶舱, 747-400 的仪表算是相当简洁了, 尤其是飞行仪表部分. 这主要归功于舱内六个 8吋 X 8吋多功能显示屏将许多仪表整合, 这就是即将介绍的 IDS. 首先先来看看这六个显示屏的名称, 位置及功能.Captain's Primary Flight Display (PFD) :用来显示飞机姿态, 速度, 高度, 垂直速度, 飞行方向, 以及使用仪器降落系统时的航道偏离指示.在航空界这几个基本的飞行仪表 (姿态仪, 空速表, 高度计, 罗盘)有惯用的排列方示, 即所谓的 " T 法则".虽然 747-400 不使用传统仪表, 但这些排列规则还是有遵守.Captain's Navigation Display (ND) :显示飞机的现在位置, 导航数据, 及气象雷达扫描结果. 依所显示的资料不同, 可以有底下几种模式 :APP expanded :显示 ILS 所接收到的导航资料, 供飞行员进场时参考, 包括平面上的 LOC , 及垂直方向上G/S 的偏移量.显示范围限于飞机机头方向.APP centered :与 APP expanded 相似, 但显示范围为飞机周围 360 度.VOR expanded &VOR centered :顯示 VOR 的導航資料, 與 APP 顯示相似, 但沒有垂直方向的偏移量MAP expanded :显示航路资料及飞行路线等, 让飞行员能迅速了解目前飞机所在位置.显示范围限于飞机机头前方.MAP centered :與 MAP expanded 相似, 但顯示範圍包含飛機周圍 360 度.PLAN :與 MAP expanded 相似, 但顯示範圍不隨飛機機頭方向改變, 固定以正北方為垂直方向.Main Engine Indicating and Crew Alerting System (EICAS) : 显示主要的发动机参数 (N1 - 低压涡轮轴转速, EGT - 排气温度), 及系统警告讯息.Auxiliary EICAS :显示次要发动机参数 (N2 - 高压涡轮轴转速, 燃油流量, 滑油温度, 压力 等), 以及系统状态图. (关于 EICAS 部份, 另辟单元说明)First Officer's Primary Flight Display (PFD) :与 Captain's PFD 类似.First Officer's Navigation Display (ND) :与 Captain's ND 相似在近代发展的飞机上, 这类利用多功能显示屏整合仪表的例子非常多. 一般会将 PFD 及 ND 的显示系统合称为 EFIS (Electronic Flight Instrument System, 电子飞行仪表系统). 而发动机参数显示, 或是系统故障显示, 则由另外的计算机模块来负责. 例如 MD-90 上, EFIS 是由 Symbol Generator 所控制, 系统的故障显示则由 Master Warning and CautionController 负责.哈 ! 看得晕头转向了吗 ? 没关系, 反正我们要谈的是 747-400, 就把 MD-90 先忘了吧 ! 这里要强调的是, 在 747-400 上, EFIS 与 EICAS 的功能, 都整合在一个计算机组件上, 称之为 EIU (EFIS/EICAS Interface Unit), 所以原则上任一个显示屏都可以显示任一种模式(PFD, ND, EICAS), 当然实际上会有一些限制, 这些待会再谈.(五)发动机参数显示暨组员警告系统(Engine Indicating and Crew AlertingSystem, EICAS)-------------------------------------------------就字面上解释, 本系统包含了两大功能 :一是显示飞机上四具发动机的运作状况, 二是将机上系统的不正常状况通报给飞行员.这套系统有效的减轻飞行组员的工作负荷,使得 747-400 的飞行组员由 747-300 时代的三位减少为两位 (取消机械员的编制, 只保留正副驾驶).在过去, 飞行机械员的任务是监控机上系统的运作状况, 而其中又以发动机的运作状况最为重要. 这不但是因为发动机是飞机的动力来源,需要监控的项目又最多. 而且飞行中推力不断改变, 机械员必需时时刻刻盯着仪表看.因此要减低飞行组员的工作量, 首要之务就是改善发动机参数的显示方式.至于监视系统运作, 则是 EICAS 的另一项功能. EICAS 会将不正常的状况,以文字讯息显示在屏幕上, 飞行员可以很快掌握状况, 采取适当的反应.现代大型客机都因为有了这类的系统, 而只剩下正副驾驶两名组员.虽说机上很多系统都已自动化 (包括自动驾驶), 飞行员工作量比过去减少许多,但现在他们必须跨进机械员的领域, 深入了解系统原理, 才有办法迅速处理不正常状况, 所以当个飞行员是不简单的 !EICAS 在驾驶舱内使用两个屏幕来显示有关的数据及讯息, 分别称之为 Main EICAS 及 Auxiliary EICAS. 另有 Master warning/caution light 用来提醒飞行员有新的警告讯息出现.Main EICAS :用来显示引擎的主要参数, 及警告讯息 :引擎主要参数 :主要参数指的是 N1 转数, 及排气温度 EGT. N1 转数代表引擎的推力,而 EGT 则是保护引擎最重要的参考数据, 所以特别将这两个数据显示出来.至于其它的参数, 其实只要是在正常运作状态下, 飞行员并不需要特别注意.除了以框框内的数字来显示数据外, 还用了长条状的图型来让飞行员易于掌握数据.这些数字和图型还会在不正常状况时改变颜色, 提醒飞行员注意. (正常--白色, 不正常--黄色或红色)警告讯息 :警告讯息出现在屏幕的右上方, EICAS 将所有讯息按紧急程度分为四级 :Warning : 以红色讯息显示, 需要飞行员立即作处置.Master warning light 会亮起, 提醒飞行员有 Warning 讯息出现, 有些还会出发出警告声响.Caution : 以黄色讯息显示, 飞行员需尽快作出反应, 等级低于 Warning.Master caution light 会亮起, 有些讯息还会伴随警告声响出现.Advisory : 以黄色讯息显示, 但会空一格, 以便和 Caution 讯息区隔, 仅需飞行员注意,可以稍后再处理.Memo : 以白色讯息显示, 提醒飞行员某些系统目前状态 (系统仍属正常),其它 :出现在 Main EICAS 的讯息还包括起落架, 襟翼的收放位置, 以及燃油系统, 环控系统的部份数据.Auxiliary EICAS :显示在 Auxiliary EICAS 的资料种类就比较多,共计有四种显示模式 : Engine page. Status page, Synoptic page, Maintenance page.Engine page :用来显示次要引擎参数, 包括 N2 转速, 燃油流量, 滑油压力, 滑油温度, 滑油油量, 及引擎震动大小.Status page :上半部显示某些系统的数据, 包括液压, APU, 氧气, 电瓶充电状况.右下角部分则是飞行控制面的摆动角度, 左下部份则是显示 Status message.所谓 Status message 是用来显示系统本身组件的损坏状况, 与前述的警告讯息不尽相同. 警告讯息乃针对飞行员操作飞机所需的信息所设计,而 Status 则是飞机在起飞前, 供维修人员放飞的参考.一旦飞上天空, 飞行员只要注意警告讯息即可, Status message 可以不用管他.Synoptic page :以图形的方式来表现某些系统的状态, EICAS 提供了六个系统的图标功能 :电力系统, 燃油系统, 环控系统, 液压系统, 舱门及起落架状态.底下是燃油系统的例子,飞行员可以很清楚了解各个油箱剩油多少, 那些燃油帮浦在运作, 那些阀门已打开, 燃油经过那些管路供油到引擎.Maintenance page :此项功能乃由中央维修计算机提供,维修人员可以透过这个功能得到比较详细的系统数据, 以便找出故障原因. 底下是电力系统的一个例子 :Master warning/caution light :当有新的警告讯息出现时,此灯就会亮起 (出现 "WARNING", 或 "CAUTION" 字眼), 飞行员可以按下此键, 把此灯号取消, 以供下次新讯息出现使用.驾驶舱内的控制 :EICAS display control panel :用来控制 Auxiliary EICAS 的显示模式, 及 Main EICAS 上的警告讯息显示.1. Engine display switch在 aux EICAS 上显示 Engine page2. Status display switch在 aux EICAS 上显示 Status page3. Synoptic display switch在 aux EICAS 上显示 Synoptic page :ELEC : 电力系统FUEL : 燃油系统ECS : 环控系统HYD : 液压系统DRS : 舱门开启状态GEAR : 起落架状态4. Cancel switch将 Main EICAS 上的 Caution 及 Advisory 警告讯息取消,让下一页的讯息可以显示出来.5. Recall switch将 Cancel switch 所取消的讯息再叫出来显示Brightness control, Source selector, and Event record :1. Upper CRT brightness control控制 Main EICAS 显示屏亮度2. Lower CRT brightness contro控制 Aux EICAS 显示屏亮度3. Event recording switch按下此键可以记录 Maintenance page 中当时的系统数据, 以供日后叫出参考.4. EICAS EIU selector选择 EICAS 系统使用的 EIU(六)儀器降落系統(Instrument Landing System, ILS)-------------------------------------------------題外話所謂 ILS 是利用電波在空中建立一條航道 (三度空間中的一條直線), 在降落時, 只要飛機沿著這條航道飛, 就可以到達跑道頭完成落地. 由於電波可以穿過雲雨煙霧, 因此可以幫助飛行員在惡劣天氣狀況下降落飛機,實際上 ILS 可分成兩套系統 : Localizer (簡稱 LOC) 負責飛機橫向方面的導引, 讓飛機可以對準跑道. 而 Glide Slope (簡稱 G/S) 則負責飛機垂直方向的導引, 讓飛機沿著一定的下滑角度, 在跑道頭著陸.不過 ILS 的地面裝備所費不貲, 因此通常只裝在常用的跑道方向. 當機場宣佈改變跑道方向, 飛機必須從另一端降落時, 就無法使用到 ILS 的完整功能了. 因為原本 G/S 在跑道頭所設定的著陸點, 現在變成在跑道尾了, 因此無法提供 G/S 的功能. 而 LOC 只是負責讓飛機對準跑道中心線, 因此只要將電波向後發射, 還是可以提供 LOC 的功能, 但是此時訊號作了 180 度的轉變, 原本偏左的訊號, 變成了偏右的訊號. 在這種情況下, 飛行員必須將 ILS 設定為 Back Course (背向降落)模式, LOC 部份才能正常運作ILS 原理ILS 其實可以分成 LOC 與 G/S 兩部份來說明 :LOC : 工作頻率在 108.10 MHz - 111.95 MHz 之間 (此頻率包含在 VOR 範圍中). LOC 會以跑道中心線為準, 向左右兩邊發射 90 Hz, 與 150 Hz 兩種訊號, 當飛機飛在中心線左邊時, 90 Hz 的訊號會大於 150 Hz, 反之飛在中心線右邊時, 150 Hz 的訊號會比較強. 機上的系統就可以藉此顯示出飛機的左右偏差了.G/S : 其工作原理與 LOC 類似, 以 2- 3 度的角度, 朝上下方向發射 90 Hz, 150 Hz 兩種訊號. 當飛機飛行在滑降角之上時, 90 Hz 的訊號會大於 150 Hz, 反之飛在滑降角之下時, 150 Hz 訊號會比較強. G/S 的工作頻率在 329.15 MHz - 335.0 MHz 之間, 不過其頻道已與LOC 頻道搭配, 飛行員所設定的 ILS 工作頻率都是以 LOC 為準, 一但選定 LOC 頻率, G/S的工作頻率也跟著確定.系統運作747-400 上共有三套 ILS, 分為左中右三系, 除了顯示飛行的誤差外, 還可以與自動駕駛 (Autopilot)配合, 執行自動降落. 雖然有三套系統, 不過運作上確是一體的. 設計三套系統最主要的原因, 是著眼在自動降落時, 若有一套系統不正常, 可以利用 "少數服從多數" 的原則, 剔除故障的系統, 繼續執行自動降落. 若只剩兩個系統, 而又其中一個有問題, 飛機就沒辦法判定誰是誰非, 只得放棄自動降落, 改為手動駕駛.每套 ILS ( 包括 LOC 及 G/S) 都有各自的天線, 而且每套各有兩組天線, 因此 ILS 的天線介紹起來還挺複雜的. 以下分 LOC 與 G/S 介紹LOC :LOC 的天線藏在機鼻的雷達罩內, 所以平常看不到. 此天線接收的訊號只有在自動降落時會用到.在其它情況下, LOC 的訊號是由 VOR 天線接收 (別忘了, LOC 的頻率包含在 VOR 範圍中)在其它情況下, LOC 的訊號是由 VOR 天線接收 (別忘了, LOC 的頻率包含在 VOR 範圍中)G/S :一般情況下使用雷達罩內這組天線, 稱之為 G/S Capture antenna.當鼻輪放下後, 就用輪艙門上這組天線 (其精確度比較高 ), 稱為 G/S Track antenna.當飛行員使用 FMS 的自動飛行時, 當飛機接近落地機場時, 就會自動把 ILS 的頻率調到該機場所使用跑道的 ILS 頻率, 當使用手動降落時, 飛行員就得自己輸入頻率及跑道方向了.ILS 的誤差指示會分別顯示在 PFD, ND 及備份姿態儀上.同樣的, 飛行員可透過 ACP 收聽 ILS 的摩斯代碼或音頻訊號.駕駛艙內控制CDU :飛行員要手動調整 ILS 頻率時, 必須透過 CDU 來操作.首先從標示著 "NAV RAD" 的功能鍵, 進入 FMC 的 NAV RADIO 功能選項中, 再用按鍵輸入頻率及跑道方向, 最後按下 LSK, 將資料輸入 ILS 中.EFIS control panel :其中的 Mode select switch 必須選在 "APP" 位置, 才會出現 ILS 顯示.Standyby Attitude :左下方的 APP 模式選擇鈕, 必須擺在 "APP" 的位置, 才會出現 ILS 的誤差指示, 若使用Back course, 則必須選在 "B/CRS" 位置.Audio control panel :右下角的 Approach receiver selector 選擇在 L, C, R 位置, 打開左邊灰色的收聽鈕, 就可以分別收聽左中右三系 ILS 的音頻訊號了.(七)输出入装置-------------------------------------------------随着机上系统的数字化, 飞行员与飞机间的沟通日益复杂.过去仪表上的按键或旋钮式的输入方式已经不敷使用, 因此驾驶舱内开始出现一些数字化的输出入装置.你可以把机上系统当作一台计算机,而他的键盘及屏幕, 就是底下要介绍的 CDU (Control Display Unit), 而另一个输出装备就是打印机.--------------------------------------------------------------------------------Control Display Unit (CDU) :在 747-400 上 CDU 主要提供中央维修计算机 (CMC)及飞行管理计算机 (FMC) 作为输出入装置使用,因为这两套计算机需要操作人员输入许多参数.另外也提供航空通信暨报告系统 (ACARS) 及航机状况监视系统 (ACMS)作为人机沟通接口.CDU 上各个系统的功能, 会在相关的章节介绍, 底下我们就来了解一下 CDU 的各部功能1. Line select key :(LSK) 由於駕駛艙內沒有滑鼠, CDU 也不是觸控式螢幕, 因此 CDU 的作法是把各電腦所提供選項列在螢幕中, 再透過 LSK 選取. 因此每個 CDU 螢幕一次最多只能顯示 12 個選項.2. 顯示幕 :總共可顯示 14 行文字. 其中第一行是每頁的標題,最後一行用來顯示系統訊息, 或作為輸入資料時的暫存區, 其它每行 LSK有一行提示文字,一行顯示資料, 共 12 行.最後一行也當作輸入暫存區, 例如要輸入 VOR 電台頻率時, 輸入的數字會先出現在此區, 再按下 VOR 頻率輸入鍵 (LSK), 系統就會 "吃" 進輸入的數據.3. FMC function key :提供飛行管理電腦中某些功能的熱鍵.4. Brightness control :控制螢幕亮度.5. MENU key :回總目錄, 由此可進入 FMC, CMC, ACARS, ACMS.6. Page key :到上一頁或下一頁.7. 訊息燈號 :顯示 CDU 的一些不正常或提醒飛行員的燈號.8. 數字鍵 9. 字母鍵印表機 :飛機上的印表機可讓 CMC, ACRAS, ACMS 將所輸出資料印在紙上. :CMC :可將所記錄的系統損壞狀況, 或是系統當時的運作參數印出ACARS :由 ACARS 所接收到地面所發出的連絡訊息, 可由印表機印出ACMS :ACMS 所記錄的不正常報告, 可由印表機輸出.(八)自动驾驶系统(Autopilot)-------------------------------------------------题外话飞行, 实在不是一件简单的事情, 就拿最基本的转弯来说好了, 飞行员首先要打副翼让机身倾斜, 同时要适度的踩方向舵, 避免 Adverse Yaw 的产生, 在手忙脚乱的当头, 还要注意是不是掉了高度, 慢了速度, 升降舵, 油门都不能闲着. 好不容易才开始平稳的转弯, 马上又到了我们要的机头方向, 于是又是一阵手忙脚乱, 把飞机改回平飞状态.现在有了自动驾驶, 要转弯, No problem ! 用两根手指, 转动一下旋钮, 要往那个方向飞, 就往那里飞, 而且又平又稳. 若再加上个飞行管理计算机, 先把飞行路径设定好, 甚至连转旋钮的动作都可以免了. 这么神奇的功能, 就是本单元要介绍的自动驾驶.--------------------------------------------------------------------------------运作架构整套自动驾驶系统的核心, 是三部飞行控制计算机 (Flight Control Computer, FCC). 每部FCC 都是可以独当一面的大将, 只需一套就可进行自动驾驶控制. FCC 接受各方的讯号, 决定飞机该如何飞, 再去控制飞行控制面, 来迎合飞行员的要求.不过 747-400 上的飞行控制, 都还是传统机械式的传动, 因此 FCC 所发出的电的讯号, 必需有另一组机件来执行, 就是所谓的服务器 (Servo). 服务器可以利用液压作为动力 (液压唧统, piston), 将 FCC 过来的电讯, 转换为机械运动, 藉此来控制各飞行控制面.在飞行三轴的主要控制面上 (副翼, 升降舵, 方向舵) 都装有服务器, 可供 FCC 来控制, 但在飞行中, FCC 仅对副翼及升降舵作控制, 方向舵的控制就直接交由 Yaw Damper , 用来做协调转弯之用. 只有在降落过程中, 飞机触地时, FCC 才会用方向舵的服务器, 来作对正跑道的动作 (因为在地面上, 方向舵与鼻轮转向是同步控制的FCC 发出的控制讯号, 除了可以给服务器动作外, 也可以显示在 PFD 上, 称为 Flight Director (FD). 这是一组紫红色的十字线条, 在自动驾驶失效时, 可以给飞行员手动驾驶时一个参考.--------------------------------------------------------------------------------控制功能简介自动驾驶系统把飞行控制面的控制分成两个部份, 一是属于平面上的方向控制, 因为这部份是由副翼控制 Roll 轴上的运动来达成, 因此称为 Roll Mode. 另一部份是高度方面的控制, 因为是由升降舵控制 Pitch 轴上运动来达成, 因此称为 Pitch Mode. 若再加上自动油门控制 (Autothrottle mode), 这三个部份就组成自动驾驶的整个运作.以下就整个飞行的几个阶段, 来简述自动驾驶的应用 :1. 起飞 :虽然从对正跑道后, 自动驾驶就有能力接手飞机的起飞过程, 不过目前碍于法规的规定, 飞行员必需在离地 400 呎后才能启动自动驾驶, 因此起飞过程无法使用, 但飞行员还是可以参考 Flight director 的指示来飞行.2. 爬升, 巡航, 下降 :在这个阶段, 飞行员可以用不同的模式来操作自动驾驶系统, 他可以设定机头朝某个方向飞, 以某个固定的速度飞行, 以某固定的垂直速度爬升或下降, 设定巡航高度等等, 或者干脆交给飞行管理计算机全权处理.3. 降落 :当飞机接近降落机场, 并且已经捕捉到 ILS 的讯号时, 飞行员就可以启动进场模示. 飞机会自动对准跑道, 依 ILS 设定的滑降角度降落, 有侧风会自动修正, 在落地前会自动改平 (Flare), 落地后会自动修正滑行的路线 (免得冲出跑道), 等飞机减速后, 飞行员就会关掉自动驾驶系统了.。
PMDG744 面板介绍
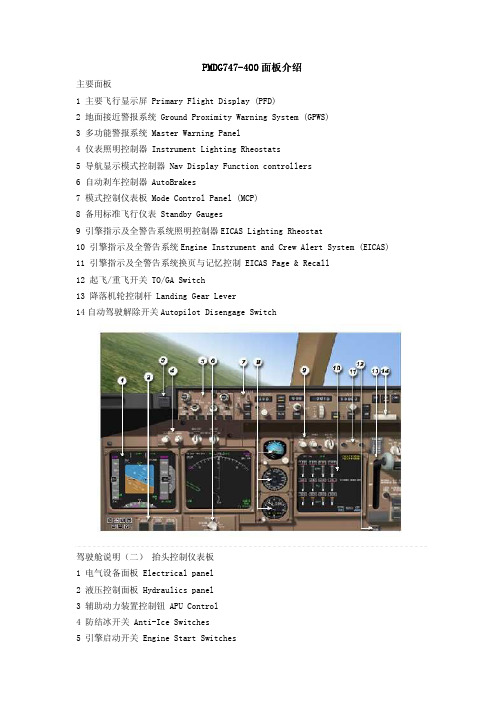
PMDG747PMDG747--400面板介绍面板介绍主要面板1 主要飞行显示屏 Primary Flight Display (PFD)2 地面接近警报系统 Ground Proximity Warning System (GPWS)3 多功能警报系统 Master Warning Panel4 仪表照明控制器 Instrument Lighting Rheostats5 导航显示模式控制器 Nav Display Function controllers6 自动剎车控制器 AutoBrakes7 模式控制仪表板 Mode Control Panel (MCP)8 备用标准飞行仪表 Standby Gauges9 引擎指示及全警告系统照明控制器EICAS Lighting Rheostat10 引擎指示及全警告系统Engine Instrument and Crew Alert System (EICAS) 11 引擎指示及全警告系统换页与记忆控制 EICAS Page & Recall12 起飞/重飞开关 TO/GA Switch13 降落机轮控制杆 Landing Gear Lever14自动驾驶解除开关Autopilot Disengage Switch驾驶舱说明(二) 抬头控制仪表板1 电气设备面板 Electrical panel2 液压控制面板 Hydraulics panel3 辅助动力装置控制钮 APU Control4 防结冰开关 Anti-Ice Switches5 引擎启动开关 Engine Start Switches6 燃油系统面板 Fuel Systems panel7 照明设备开关 Lighting Switches8 气流控制面板Pneumatics Panel9环境控制面板 Environment Panel中央基座控台CENTER PEDESTAL1 油路控制开关 Fuel Cutoff Switches2 停机煞车杆 Parking Brake Lever3 襟翼控制杆 Flap Control Lever4 配平指示器 Stabilizer Trim Indicator5 节流阀 Throttles6 空气煞车杆 Speed Brake Lever7 下方引擎指示及全警告系统画面控制键 Lower EICAS Page Controls8 飞航管理计算机面板 FMC Panels9下方引擎指示及全警告系统显示屏 Lower EICAS驾驶舱说明(三) 飞航管理计算机面板1 飞航管理计算机输入键盘 FMC Keyboard2 飞航管理计算机功能输入按键 Mfunction Switches3 执行开关 Execute Switch4 左排选择按键 Left LSKs (Line Select Keys)5 右排选择按键 Right LSKs6 飞航管理计算机数据显示屏FMC Data Screen模式控制仪表板 MCP PANEL1 决定高度调整钮 Decision Height Adjustment knob2 水平状况显示屏模式选择钮 HSI Mode Selector3 水平状况显示屏可视距离调整钮 HIS Range knob4 公制 / 英制 选键 Meters / Feet Switch5 气压拨定选择钮 Barometic Pressure Selector Knob6 自动节流阀设定开关 Auto Throttle Arming Switch7 速度设定窗 Speed Selection Window8 垂直高度导航钮 LNAV Switch9 航向设定窗 Heading SelectionWindow10 航向选钮及转弯坡度限制选钮Heading Selector Knob & Bank Limit Selector11 垂直速率设定窗Vertical Speed Selection Window12 高度设定窗 Altitude Selection Window13 高度设定调整钮 Altitude Selection Knob14 Localizer Hold Switch15 自动驾驶控制开关 Autopilot Connect Switches16 左边(NAV1)VOR/ADF选择开关 Life VOR/ADF Selector Switch17 水平状况显示屏数据选择钮 HSI Data Display Switches18 右边(NAV2) VOR/ADF选择开关 Right VOR/ADF Selector Switch19 飞行指示开关 Flight Director On/Off Switch20 自动驾驶速度控制 Autopilot Speed Switch 21 速度模式(指示空速/马赫)选纽 IAS Mach toggle switch22 速度设定调整钮Speed Selection Knob23 FLCH 按键开关 FLCH Switch24 VNAV 按键开关 VNAV Switch25 航向保持按键开关 Heading Hold Switch26 垂直速率控制转轮 Vertical Speed Control Wheel27 垂直速率控制开关 Vertical Speed Switch28 高度保持按键开关 Altitude Hold Switch29 进场保持按键开关 Appraoch Hold Switch30 自动驾驶解除开关 Autopilot Disengage Switch无线电控制面板RADIO PANEL1 请勿吸烟警示选纽 No Smoking Warning Switch2 使用中的无线电频率 Active Radio Frequency3 无线电模式选纽 Radio Mode Selector Buttons4 使用/被用无线电选纽 Active/ Standby Selector Switch5 被用无线电频率 Standby Radio Frequency6 无线电频率内环调整钮 Radio Frequency Inner Tuning Knob7 无线电频率外环调整钮 Radio Frequency Outer Tuning Knob8 座位安全带警示选纽 Seatbelt warning System Switch时钟控制面版 CLOCK PANEL1 马表计时控制键 Stopwatch Start / Stop / Reset control2 使用时间控制选纽 Elapsed Time Switch3 现在标准时间 Current Time4 使用时间 Elapsed Time5 飞行加速模式选纽 Flightsim Accelerated Time control。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机师通用训练教材747-400自动驾驶及飞航管理系统747-400 Auto-Pilot System & FMS课程内容:PSS747/747-PS1及其它高拟真度747-400飞行仿真软件之自动驾驶系统/飞航管理系统操作说明。
本课程仅列入仿真飞行软件相关内容及必要之概念,部份内容因仿真软件之真实程度限制,可能与实际747-400之操作有所不符,请同仁注意。
课程目的:对波音747-400之AP/FMS系统操作完全熟悉,并了解其运作逻辑,并能藉此操作任何相似之747-400仿真飞行软件。
于搭乘747-400时若遇到电影情节(正副驾驶均失能,机上无人能操控),能增加存活机率。
宣告:一、本教材内容仅适用于仿真飞行软件,不得用于实施真实飞行员训练。
第一章自动驾驶基本概念建立3第二章EFIS飞航仪表8第三章MCP面板操作27第四章FMS-CDU操作31写在前面本文基本上是教材。
不,不是基本上,它根本就是教材。
所以,它不是操作手册。
因为它不是操作手册,所以没有很明确的按系统分门别类。
若读者遇上某系统的问题,想翻到那一部份看看,可能找不到,因为前面讲过了,故到此就省略了。
或者,觉得这时候讲不太妥,就写“后详”。
因为它是教材,所以废话特别多;尤其是依本人精神,废话更多。
因为我不想用「专业」语法吓人,而笔者也并非专业人士。
废话多,为了解释原理。
有时为了解释原理,不得不拆散系统。
结论:本文最好还是一路看下去,别跳页。
本文不是针对任何一种仿真飞行软件所写,而是希望以真实飞机系统为教学对象。
因为现在软件越做越好,天晓得教材写完后多久,就出来个一模一样的?针对某特定软件写「系统操作」,勤劳人当为之,笔者懒矣,干脆一劳永逸。
问题来了,要对真飞机写教材,图怎么办?没办法,有粥吃粥有屎吃屎。
各位可以发现大部份的图是从747 PS1中抓来的。
它的画面实在不怎么样,可是它最真。
所以不要误会我是在写PS1教材!我作梦都会梦到该公司会出一套FS版本的系统外加AIR文件。
最要说明的是,手中没PS1的同好翻一翻后可能会觉得大部份的内容都用不上,看这份教材干什么呢?一,让你知道你现在玩的系统有多假。
二,知道真的怎么操作,假的还难得了人吗?三、波音系统骨子里都一路货,触类能旁通。
真的,这份看看,767的系统也照玩,虽然还是得摸一摸。
最后,747 PS1其实还真是个好东西,想学747-400系统的同好,最好设法拥有一套。
第一章自动驾驶基本概念建立一、不同的自动驾驶模式在FS仿真飞行中一提到自动驾驶,大家脑海中就会浮现出以下的控件目:1.自动油门和速度模式:把自动油门打开,然后设个速度让飞机跑;指示空速和马赫数还能切换,真好。
2.方向控制模式:设在HDG上,一按亮飞机就往那个方向跑。
3.自动导航模式:NAV能拦VOR幅向,“GPS”打开的话就沿飞行计划走。
4.高度和垂直速度模式:高度设在ALT、垂直速度设VS。
5.APP模式:拦LOC和G/S,还能自动落地。
还有吗?好象没了,FS2000所有能用的自动驾驶功能就全在上头了。
好,现在我们来看这些模式之中,有那些模式激活后,别的模式会跳掉。
1.用航向选择模式就不能用NAV导航或APP自动落地。
2.用NAV导航就不能用航向和APP。
3.用高度/垂直速度模式就不能用APP,只能单独拦LOC。
4.用APP就不能用航向选择、NAV导航、高度/垂直速度模式。
我们从FS2000的实践中可发现,不同的自动驾驶模式可能会相克,逼你在同一时间只能选用一种。
就像你想要自动落地,就不能去微调垂直升降率;你想飞指定的航向,就不要用自动导航……等等。
有些模式不会相克,如APP自动落地阶段你可以开着自动油门控速,也可以关了自动油门自己操作;NAV自动导航模式中你可以维持某高度,也可以任意上升下降。
从以上描述,各位可以推论出来:同一类的模式只能同时执行一种;不同类的模式则互不干扰。
如控制飞机左右航向的模式,要嘛就HDG、要嘛NAV,再不然APP;但不论你选以上任一种模式,你都可以决定自动油门要不要开着。
这就是一种「模式」的概念。
在真实747-400上,自动驾驶系统的模式更多,但原理仍是一样的。
主要和FS「简化版」自动驾驶系统差异所在,在于多了LNAV 和VNAV两种导航模式、空层转换(Flight Level Change)变高模式、高度及航向的HOLD模式、两种自动油门模式选择,以及少了NAV自动拦VOR幅向功能。
多了这些东西,让自动驾驶的相生相克情况更加复杂,模式间还可能自动转换跳来跳去。
这使得同仁们在开始接触高拟真仪表板时经常大叫:「怎么会这样?」、「这怎么按不下去?」、「喂!你他╳的给我动啊!」……虽然本文是为仿真飞行所作,但基本是以「真实飞机」为蓝本所写,因此其难度会比「基本仪器飞行」要高很多。
为了后续学习的需要,在此先把几种比较常见的自动驾驶模式组合排列出来,大家先“ㄌㄨ”一遍心里有个底。
二、常见的自动驾驶模式组合范例1. LNAV+VNAV这是巡航中最常见的模式,完全交给飞航管理计算机去控制。
LNAV控制水平导航,VNAV控制垂直导航(高度)及自动油门(速度、油门大小)。
2. LNAV+VNAV+MCP SPD。
这表示基本上我们还是用LNAV和VNAV来飞;但速度多少由我指定,而不是计算机计算出来的经济速度。
MCP就是你现在看到的面板;MCP SPD就是你在这上面设的速度。
你在巡航时觉得VNAV给你的速度不太适合目前需求,临时想改一下速度,就用这种模式。
按一下白色的钮数字就跳出来;要回复VNAV的速度就再按一下让数字消失。
3. LNAV+SPD+VS平面模式用LNAV,升降用VS控制升降率,到面板设定高度;速度自行设定。
只要在LNAV+VNAV爬升状态下按VS,就变这付德性。
比方说你嫌VNAV 爬得太慢或太快,这是解决方式之一。
4. HDG SEL+VNAV自订航向选择(HDG SEL)加VNAV。
HDG SEL只要按一下SEL钮即可,在这面板上看不出来,没有这模式的亮灯;不过主飞航显示屏(PFD)上会显示HDG SEL 字样。
在LNAV导航途中临时要改变航向,就转一转HDG再一按即可;要改回来就先设一个能拦回航路的航向,再按一下LNAV。
5. THR+其它非VNAV模式有时若情况需要大推力时,就按THR,发动机推力会推到当时所能到达的极限。
要按THR,得先让VNAV跳掉。
(除此之外,这也是玩FS时能最快到达目的地的方法之一,真飞机就不能这样玩了)6. VNAV+HDG HOLD要跳开LNAV,除了按HDG SEL外,若暂时不变更航向,也可以按HDG HOLD,它会维持目前的航向。
假如在转向时按下HOLD,它会维持改平后的航向。
7. LNAV+SPD+ALT HOLD和前项同一个概念,跳开VNAV,并维持现有高度。
若在升降中按ALT HOLD,会维持改平后的高度。
8. HDG HOLD+ALT HOLD+SPD完全不用LNAV及VNAV,维持现有航向和高度,速度也自己调。
新手在处于手忙脚乱不知如何是好的危急状况时,两个HOLD按下去就是了,至少先把飞机稳住再慢慢想办法。
9. HDG SEL+SPD+VS这简单,和之前LNAV+SPD+VS的差别只是航向也由你设定。
自己动手设定飞离场时常见到这种模式。
10. LNAV+Flight Level Change(FLCH)按空层转换(FLCH)钮是巡航时变更高度的一种方式,通常只在两种状况下会用到:1.临时改一下,如应航管要求;过一阵子还会回到原巡航高度;2.想用最大推力爬升或零推力下降。
因为用FLCH爬升时发动机会用全推力;下降时油门则收到底。
它会用升降率去控制维持显示在面板上的速度,此时你也可以调整。
11. HDG SEL+SPD+ALT HOLD这还用说吗?玩FS一般最常用到的模式,没有任何自动导航。
12. VNAV+LOC你只拦左右定位台(Localizer),其它交给VNAV。
当然,我们都知道过一阵子VNAV也得跳掉,否则会死得很难看。
怎么跳?这时若是在下降且想继续降下去,按VS;若是维持高度,或下降中想改平,按HOLD。
13. APP+SPD这也不用多说,FS中常见的场面。
操作方式也一样,APP可在处于其它模式下先按下去等着,到了拦到LOC和G/S后其它模式就分别自动跳掉。
三、FMC与自动驾驶之基本关联正式进入主题前先连续来十三个图文并茂示范,目的不在于教会各位现在就能灵活使用面板上的开关――就靠以上这些「简化版」说明还早得很呢――而是如同前文所述,先对自动驾驶系统不同模式的运作逻辑有个概念:我们是在飞一些自动驾驶的「模式」,而这些模式还挺复杂的,没有想象中那么单纯。
尤其是和飞航管理计算机(Flight management Computer, FMC)相结合之后。
当代只要是档次高一点的飞机都有飞航管理计算机,我们先不讲得太深入,只谈各位最关心的一点:它跟自动驾驶有什么关系?最简单的说法,它只管LNAV、VNAV,以及APP后接着的自动落地(AutoLand)。
你怕它的话,把LNAV、VNAV两个关掉就没事了,然后一切按「老规矩」飞;自动落地我想没人会反对。
若想让计算机帮你忙,这两个好歹得亮上一个。
若要讲得专业一点,也没上面说得那么简单,不过我们也不需要知道那么多。
我们目前只要先知道:自动驾驶面板上,只有LNAV和VNAV两个钮是直接和FMC发生关系的。
其它就算有关系,和我们玩FS的操作行为也没什么关系。
对新手而言,先知道这样就够了。
第二章EFIS飞航仪表全新接口的EFIS仪表747-400不是什么具原创性的先进产物,而是从六○年代的747一再演进而来。
其飞操系统亦然,也就是在旧有的架构上加上一些新接口,骨子里还是一样。
这么说毫无贬意,至少它稳当,对深怕摔飞机的航空公司而言这点是很重要的。
为什么要说这些呢?这是要降低各位对747-400的敬畏感,不要看了复杂的仪表就敬鬼神而远之。
当然,要设计出这么大一架能飞的飞机实在不是难事,很多国家都做得到;但是要做到能让航空公司自愿下订单则颇需一些工业底子,而美国的工业实力恐怕在本世纪中叶前仍将霸占世界鳌头。
为什么要说后面这段呢?这是告诉各位,咱们的747系列还有的飞呢,不会太早被淘汰的,所以其系统还是值得我们去学习的。
由于747-400仍是机械液压系统操作而非线传飞控(FBW),所以基本上飞747和飞737没什么多大差别,差的只是操作接口有所不同,基本操作逻辑是一样的。
当然,在FS之类的仿真飞行软件中,FBW和传统操作是感觉不出什么差异的。
其不仅仅是在于「力回馈」的因素,FBW有些不同的操作逻辑,以专攻西斯纳小飞机见长的FS也不可能去仿真出来。
目前流行的微软仿真飞行外加套件或如747PS1之类的专业仿真程序都是以EFIS操作接口来勾引消费大众,是故以下即先针对747-400的EFIS飞航仪表作一简介。