第14章轴z1
山东理工大学机械设计习题
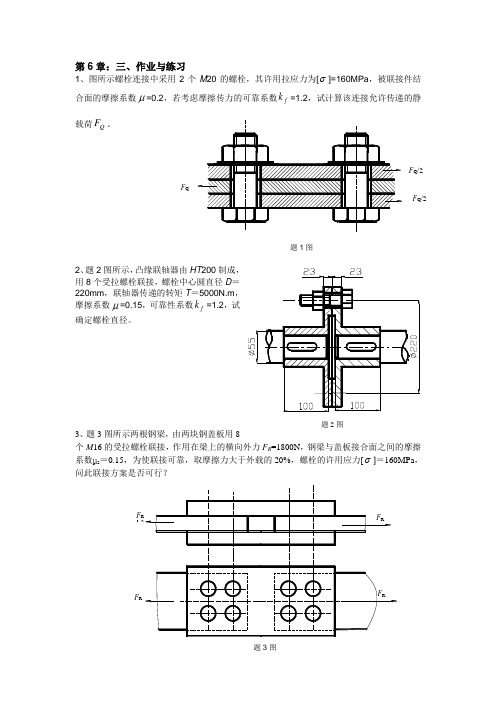
第6章:三、作业与练习1、图所示螺栓连接中采用2个M 20的螺栓,其许用拉应力为[σ]=160MPa ,被联接件结合面的摩擦系数μ=0.2,若考虑摩擦传力的可靠系数f k =1.2,试计算该连接允许传递的静载荷Q F 。
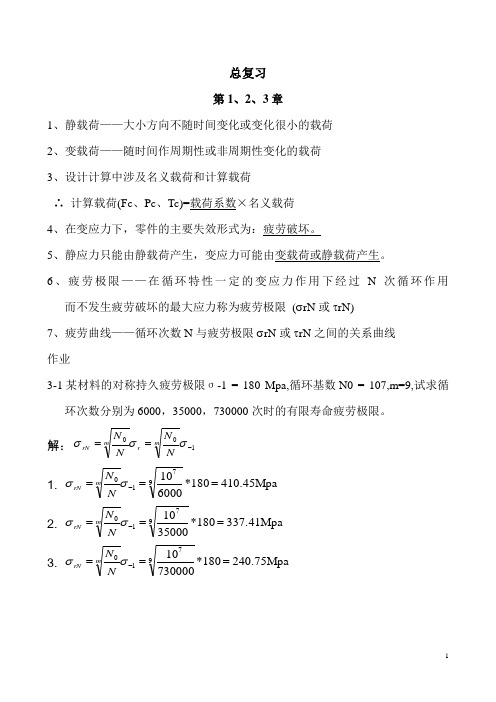
2、题2图所示,凸缘联轴器由HT 200制成,用8个受拉螺栓联接,螺栓中心圆直径D =220mm ,联轴器传递的转矩T =5000N.m ,摩擦系数μ=0.15,可靠性系数f k =1.2,试确定螺栓直径。
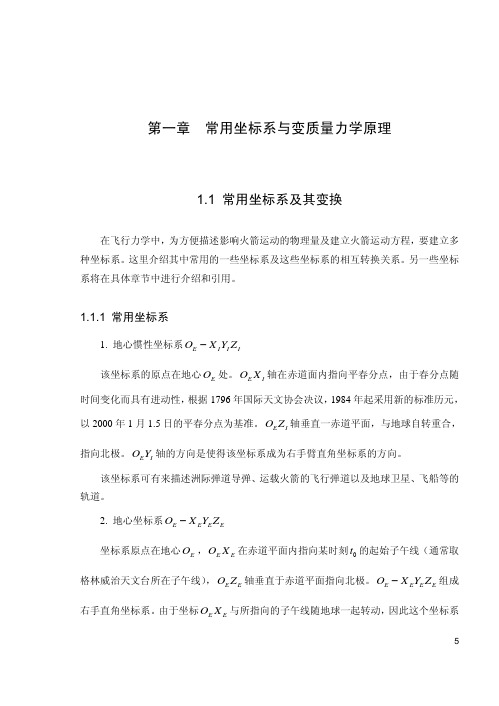
3、题3图所示两根钢梁,由两块钢盖板用8个M 16的受拉螺栓联接,作用在梁上的横向外力F R =1800N ,钢梁与盖板接合面之间的摩擦系数μs =0.15,为使联接可靠,取摩擦力大于外载的20%,螺栓的许用应力[σ]=160MPa ,问此联接方案是否可行?题2图题1图题3图4、题4图所示的气缸盖连接中,已知:气缸中的压力在0到1.5MPa 间变化,气缸内径D =250mm ,螺栓分布圆直径0D =346mm ,凸缘与垫片厚度之和为50mm 。
为保证气密性要求,螺栓间距不得大于120mm 。
试选择螺栓材料,并确定螺栓数目和尺寸。
5、题5图所示有一支架用一组螺栓与机座联接如图示,所受外载为F =10000N ,45=α。
结合面的摩擦系数为0.15,摩擦传力可靠系数2.1=f K ,螺栓的许用应力[]400=σMPa 。
试求螺栓的计算直径。
第7章 三、作业与练习1、题1图所示为在直径d =80mm 的轴端安装一钢制直齿圆柱齿轮,轮毂长L =1.5d ,工作时有轻微冲击。
试确定平键联接尺寸,并计算其能传递的最大转矩。
题5图第11章 带传动 三、作业与练习1、已知某单根普通V 带能传递的最大功率P =4.7kW,主动轮直径D 1=100mm ,主动轮转速n 1=1800r/min,小带轮包角α= 1350,带与带轮间的当量摩擦系数25.0=v μ。
求带的紧边拉力1F 、松边拉力及有效拉力F (忽略离心拉力)。
天津理工大学机械设计总复习
总复习第1、2、3章1、静载荷——大小方向不随时间变化或变化很小的载荷2、变载荷——随时间作周期性或非周期性变化的载荷3、设计计算中涉及名义载荷和计算载荷 ∴ 计算载荷(Fc 、Pc 、Tc)=载荷系数×名义载荷4、在变应力下,零件的主要失效形式为:疲劳破坏。
5、静应力只能由静载荷产生,变应力可能由变载荷或静载荷产生。
6、疲劳极限——在循环特性一定的变应力作用下经过N 次循环作用而不发生疲劳破坏的最大应力称为疲劳极限 (σrN 或τrN) 7、疲劳曲线——循环次数N 与疲劳极限σrN 或τrN 之间的关系曲线 作业3-1某材料的对称持久疲劳极限σ-1 = 180 Mpa,循环基数N0 = 107,m=9,试求循环次数分别为6000,35000,730000次时的有限寿命疲劳极限。
解:100-==σσσmrmrNNN NN1. 410.45Mpa180*6000109710===-σσmrN NN 2. 337.41Mpa180*35000109710===-σσmrN NN 3. 240.75Mpa180*730000109710===-σσmrNNN第6章螺纹联接1、在常用的螺旋传动中,传动效率最高的螺纹是_____(4)_____。
(1)三角形螺纹(2)梯形螺纹(3)锯齿形螺纹(4)矩形螺纹2、在常用的螺纹联接中,自锁性能最好的螺纹是____(1)______。
(1)三角形螺纹(2)梯形螺纹(3)锯齿形螺纹(4)矩形螺纹3、在常用的螺纹联接中,用于联接的螺纹是____(1)______。
(1)三角形螺纹(2)梯形螺纹(3)锯齿形螺纹(4)矩形螺纹4、承受预紧力F′的紧螺栓联接在受工作拉力F时,剩余预紧力为F″,其螺栓所受的总拉力F0为_____(2)_____。
(1)'+=FFF0(2)"+=FFF(3)"'=FFF+5、为了保证联接的紧密性和刚性,F”>06螺纹联接防松的根本问题在于___(3)__。
《现代光学》课件第1章

29
第1章 现代光学的数学物理基础
可将r0、r1和r的表达式作泰勒展开,取旁轴近似为 (1.1-29)
30
第1章 现代光学的数学物理基础
由于振幅随r的变化比较缓慢,故振幅因子中的r可作 近似: r≈d,于是得到旁轴近似条件下轴外点光源发出的 球面波在(x,y,z1)面上的复振幅分布的表达式为
(1.1-22)
21
第1章 现代光学的数学物理基础
3. 柱面波 均匀无限长同步辐射的线光源发出的光波为柱面波。 柱面波的特征是: 相位间隔为2π的等相面是一组等间距同 轴柱面,光波场中各点的振幅与该点到轴线的距离的平方 根成反比。
22
第1章 现代光学的数学物理基础
图1.1-3 柱面波示意图
23
第1章 现代光学的数学物理基础
复振幅为
令 (1.1-24)
25
第1章 现代光学的数学物理基础
对于给定的观察面,z1为常量,则U0也是与x、y无关 的常量。显然U0不影响该面上复振幅的相对分布。于是该 观察面上的复振幅可简写为
(1.1-25)
26
第1章 现代光学的数学物理基础
2. 球面光波场中任意平面上的复振幅 这里以发散球面波为例讨论。如图1.1-4所示,点光源 Q(x0,y0)在(x0,y0,z0)面内,观察点P(x,y)在(x,y,z1)面内,两平 面间距离为d=z1-z0。Q到P的矢径为r,z0到P的矢径为r0, Q到z1的矢径为r1,这些矢径的长度分别为
由式(1.1-4)与式(1.1-2),可以给出相应的光学拉格朗 日函数定义:
(1.1-5) 此处,z可假定起着与拉格朗日力学中的时间相同的作用。 与经典力学中的情况类似,我们同样能够引入哈密顿量。 根据经典力学中广义动量p和q的定义:
国家开放大学机械设计基础形成性考核习题及答案

机械设计基础课程形成性考核作业(一)第1章 静力分析基础1.取分离体画受力图时,__CEF__力的指向可以假定,__ABDG__力的指向不能假定。
A .光滑面约束力B .柔体约束力C .铰链约束力D .活动铰链反力E .固定端约束力F .固定端约束力偶矩G .正压力2.列平衡方程求解平面任意力系时,坐标轴选在__B__的方向上,使投影方程简便;矩心应选在_FG_点上,使力矩方程简便。
A .与已知力垂直B .与未知力垂直C .与未知力平行D .任意E .已知力作用点F .未知力作用点G .两未知力交点H .任意点3.画出图示各结构中AB 构件的受力图。
4.如图所示吊杆中A 、B 、C 均为铰链连接,已知主动力F =40kN,AB =BC =2m,=30.求两吊杆的受力的大小。
解:受力分析如下图列力平衡方程:又因为 AB=BC第2章 常用机构概述1.机构具有确定运动的条件是什么答:当机构的原动件数等于自由度数时,机构具有确定的运动2.什么是运动副什么是高副什么是低副答:使两个构件直接接触并产生一定相对运动的联接,称为运动副。
以点接触或线接触的运动副称为高副,以面接触的运动副称为低副。
3.计算下列机构的自由度,并指出复合铰链、局部自由度和虚约束。
(1)n =7,P L =10,P H =0 (2)n =5,P L =7,P H =0C 处为复合铰链(3)n =7,P L =10,P H =0 (4)n =7,P L =9,P H =1E 、E ’有一处为虚约束F 为局部自由度C 处为复合铰链第3章 平面连杆机构1.对于铰链四杆机构,当满足杆长之和的条件时,若取_C_为机架,将得到双曲柄机构。
A .最长杆B .与最短杆相邻的构件C .最短杆D .与最短杆相对的构件2.根据尺寸和机架判断铰链四杆机构的类型。
a )双曲柄机构b )曲柄摇杆机构c )双摇杆机构d )双摇杆机构3.在图示铰链四杆机构中,已知,l BC =150mm ,l CD =120mm ,l AD =100mm ,AD 为机架;若想得到双曲柄机构,求l AB 的最小值。
复变函数第一章

z1 z1 z2 z2
Arg(
z1 z2
)
Arg
z1
Arg
z2
1、 幂函数
非零复数 z 的 n 次幂
zn rnein rn (cos n i sin n )
其中
zn z n , Arg zn nArg z.
令 r = 1,则得棣莫弗公式
(cos i sin )n cos n i sin n
21
•连续曲线 若实函数 x(t) 和 y(t) 在闭区间[, ]
上连续,则方程组
x x(t),
y
y(t),
( t )
或复数方程 z z(t) x(t) iy(t) ( t )
代表一条平面曲线,称为 z 平面上的连续曲线.
进一步地,若在 t 上,x '(t) 及 y '(t) 存在、
E(C)
线 C 把 z 平面唯一地分成
C、I(C) 及 E(C) 三个点集,
I(C)
它们具有如下性质:
(1)彼此不交;
O
C
x
(2)I(C) 是一个有界区域(称为 C 的内部);
(3)E(C) 是一个无界区域(称为 C 的外部).
25
•单连通区域 设 z 平面上的区域 D, 若在 D 内 无论怎样画简单闭曲线,其内部仍全含于 D, 则称 D 为单连通区域. 非单连通的区域称为多 连通区域.
y
z
v
w
2 O 2 x
4 O 4 u
31
•反函数 假设函数 w=f(z) 的定义域是 z 平面上的 集合 G,值域是 w 平面上的集合 G*. 对 G* 中 的每一个点 w,在 G 中有一个(或至少两个) 点与之相对应,则在 G* 上确定了一个单值(或
第14章 手动变速器(1)

速器组成,传动比可在几个范围内连续变化。
变速器档数:前进档的位数。
2、按操纵方式分:
(1)手动变速:靠驾驶员直接操纵变速杆进行换挡的 变速器,结构简单,工作可靠,但操作复杂; (2)自动变速:根据汽车运行状况自动换挡,无离 合器通过加速踏板控制车速,操作简单,结构复杂; (3)半自动变速:组合式:常用挡位采用自动换挡, 其余挡位由驾驶员手动操纵;预选式:驾驶员先用按钮 选定挡位,在踩下离合器踏板或松开加速踏板时,接通 自动控制和执行机构进行自动换挡。
无同步器时变速器的换档过程
a、从低档换入高档 结合齿圈 脱离瞬间: V4=VJ
;
四档齿轮
五档齿轮
V5>VJ、 V4; 保持空档片刻 V5降低,VJ、 V4变 化不大; 在VJ与V5相等时挂 入五档。
花键毂
结合套
中间轴
b、从高档换入低档
脱离瞬间: V5=VJ; V4<VJ、 V5; 抬起离合器踏板, 踩一下油门踏板, V4升高,VJ变化 不大; 在VJ与V4相等时 挂入四档。 五档齿轮
第14章 手动变速器
一、功用:
1、改变传动比,改变汽车的行驶速度和牵引力。扩 大驱动轮的转矩和转速的范围,以适应经常变化的行驶 工况,使发动机工作在高效区; 2、改变驱动轮的旋转方向,实现倒车; 3、利用空档,中断动力传递,便于操纵。
二、变速器的分类
1、按传动比变化方式分:
(1)有级式变速器:采用齿轮传动,一般 汽车采用 3~5个前进档和一个倒档。 (2)无级式变速器:采用液力变扭器传动,传动比 可在一定的数值范围内连续变化。 (3)综合式变速器:由液力变扭器和行星齿轮式变
自锁弹簧
自锁钢球
拨叉轴
互锁钢球
常用坐标系及其间的转换
将式(1.4)中之φ0、 α0 分别用 B0、 A0 代替。即可得到。
3. 发射坐标系与箭体坐标系间的欧拉角及方向余弦阵 这两个坐标系的关系用以反映箭体相对于发射坐标系的姿态角。为使一般一状态下
这两坐标系转至相应轴平行,现采用下列转动顺序:先绕 oz 轴正向转动ϕ 角,然后绕
新的 y′ 轴正向转动ψ 角,最后绕新的 x1 轴正向转γ 角。两坐标系的欧拉角关系如图 1.4
用该坐标系与其它坐标系的关系反映出火箭的飞行速度矢量状态。
1.1.2 坐标系间转换
1. 地心惯性坐标系与地心坐标之间的方向余弦阵
由定义可知这两坐标系的 oE ZI , oE ZE 是重合的,而 oE X I 指向平春分点 oE X E 指
向所讨论的时刻格林威治天文台所在子午线一赤道的交点, oE X I 与 oE X E 的夹角要通
cosα0 cosλ0 + sinα0 sinφ0 sin λ0
cosα0 cosφ0 ⎤
sinφ0
⎥ ⎥
−sinα0 cosφ0 ⎦⎥
(1.4)
若将地球考虑为总地球椭球体,则发射点在椭球体上的位置可用经度 λ0 ,地理纬
度 B0 确定, ox 轴的方向则以射击方位角 A0 表示。这样两坐标系间的方向余弦阵只需
过天文年历年表查算得到,记该角为 ΩG ,显然,这两个坐标系之间仅存在一个欧拉角
ΩG ,因此不难写出两个坐标系的转换矩阵关系。
⎡XE⎤
⎡XI ⎤
⎢ ⎢
YE
⎥ ⎥
= EI
⎢ ⎢
YI
⎥ ⎥
(1.1)
⎢⎣ ZE ⎥⎦
⎢⎣ ZI ⎥⎦
其中
பைடு நூலகம்
⎡ cos ΩG sin ΩG 0⎤
机械基础(第五版)教材及习题册参考答案

机械基础习题册(第五版)参考答案劳动社会保障出版社绪论一、选择题二、判断题三、填空题1.机械传动常用机构轴系零件液压与气动2.信息3.动力部分执行部分传动部分控制部分4.制造单元5.高副6.滚动轮接触凸轮接触齿轮接触7.滑动大低不能8.机械运动变换传递代替或减轻四、术语解释1.机器——是人们根据使用要求而设计的一种执行机械运动的装置,其用来变换或传递能量、物料与信息,以代替或减轻人类的体力劳动和脑力劳动。
2.机构——具有确定相对运动的构件的组合。
3.运动副——两构件直接接触而又能产生一定形式相对运动的可动连接。
4.机械传动装置——用来传递运动和动力的机械装置称为机械传动装置。
五、应用题1.答:2.答:零件:螺钉、起重吊钩、缝纫机踏板、曲轴、构件:自行车链条机构:台虎钳、水泵、机器:车床、洗衣机、齿轮减速器、蒸汽机、3.答:动力部分:发动机传动部分:离合器、变速箱、传动轴、执行部分:车轮控制部分:方向盘、排挡杆、刹车、油门*4.答:略第一章带传动一、选择题二、判断题三、填空题1. 主动轮从动轮挠性带2. 摩擦型啮合型3. 摩擦力运动动力。
4. 打滑薄弱零件安全保护5. 无两侧面不接触。
6. 帘布芯绳芯包布顶胶抗拉体底胶7.Y、Z、A、B、C、D、E8.几何尺寸标记。
9.型号基准长度标准编号10.实心式腹板式孔板式轮辐式11.平行重合12.调整中心距安装张紧轮13.弧形凹形变直摩擦力传动能力14.SPZ SPA SPB SPC15.型号基准长度16.啮合带传动齿轮传动17.单面带双面带节距18. 仪表、仪器、机床、汽车、轻纺机械、石油机械 四、术语(标记)解释1.机构传动比-----机构中输入角速度与输出角速度的比值。
2.V 带中性层-----当V 带绕带轮弯曲时,其长度和宽度均保持不变的层面称为中性层。
3.V 带基准长度L d -----在规定的张紧力下,沿V 带中性层量得的周长,称为V 带基准长度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
• 1.轴受弯曲时的强度计算
• 强度条件为:
b
M W
b
(14 1)
b 弯曲应力, MPa;
M 弯矩, N mm;
W 轴的抗弯截面系数, 对于实心圆轴W d 3 0.1d 3mm3;
32
b 许用弯曲应力, MPa.
• 2.轴受扭转作用时的强度计算
• 强度条件为:
T WT
9.55 106
结束
§14-3 轴的结构设计
设计任务: 使轴的各部分具有合理的形状和尺寸。
设计 1.轴应便于制造,轴上零件要易于装拆;
要求:
(制造安装要求)
2.轴和轴上零件要有准确的工作位置;
(定位要求)
3.各零件要牢固而可靠地相对固定;(固定要求)
4.改善应力状况,减小应力集中。(加工要求)
§14-3 轴的结构设计
• (2)安装滚动轴承、联轴如②器、、③密与⑦封段圈等标准件 • 的轴径,应符合各标准件内径系列的规定;
• (3)套筒的内径,应与相配的轴径相同并采用过
• 渡配合.
• 2.轴向尺寸:
• 以设计一单级圆柱齿轮减速器的高、低速轴的 轴向尺寸为例:
• (1)轴承间跨度
l b 2a2 2l2 B b 小齿轮宽度, mm; B 初选的轴承宽度, mm; a2 小齿轮端面到箱体内壁的 距离,一般取a2 10 ~ 15mm; l2 滚动轴承端面至箱体内壁 的距离,当轴承用油润滑时 l2 5 ~ 10mm,当轴承用脂润滑 时l2 10 ~ 15mm.
• 1. 用经验公式初步估算轴的直径
• 这种方法是参考同类型的机器设备,比较轴 传递的功率、转速及工作条件,来初步估算 轴的结构和尺寸.
• 例如在一般减速器中,与电动机直接相联的 高速输入轴的轴端直径d可按以下经验公式 估算:
• d=(0.8~1.2)D (此处D为电机轴的轴端直径)
• 而各级低速轴的直径可按同级齿轮中心距a
• (2) 定位套筒与圆螺母
• ①定位套筒: 当轴上两个零件相隔距离不大时,
•
常采用套筒作轴向固定;
• ②圆螺母: 当轴段允许车制螺纹时,可采用圆螺
•
母和止动垫圈作轴向固定;
定位套筒
要求: 套筒长度 B > L(零件之间的距离)
圆螺母
• (3) 轴端挡圈与圆锥面
• 这两种方法都适用于轴伸端零件的轴向固定;
倒角
退刀槽
①②
③
④ ⑤⑥ ⑦
• 注意: 当采用套筒、螺母、轴端挡圈作轴向固 定时,应把装零件的轴段(即轴头)做得比零件 轮毂短2~3mm,以确保套筒、螺母或轴端挡圈 能紧靠零件端面.
• 四、轴的各段直径和长度的确定
• 1.径向尺寸:
如轴头①段和④段
• (1)凡有配合要求的轴段,应尽量采用标准直径;
带轮 轴承盖 轴端挡圈
套筒 齿轮
滚动轴承
典型轴 系结构
一、拟定轴上零件的装配方案
装配方案:确定轴上零件的装配方向、顺序、 和相互关系。
二、轴上零件的定位
定位方法:轴肩、套筒、圆螺母、轴端挡圈、轴承端盖。
轴肩----阶梯轴上截面变化之处。起轴向定位作用。
套筒
4、5间的轴肩使齿轮在轴上 定位,1、2间的轴肩使带轮 定位,6、7间的轴肩使右端 滚动轴承定位。
T2 T1
T1+T2
不合理 Tmax= T1+T2
(2)改进轴的局部结构可减小应力集中的影响 合金钢对应力集中比较敏感,设计时更应从结构上加以注意
应力集中出现在截面突然发生变化或过盈配合边缘处。 应力集中处
R
措施: 1) 用圆角过渡; 2)尽量避免在轴上开横孔、切口或凹槽;
采取增加卸载槽、过渡肩环、凹切圆角 等也可以减小过盈配合处的局部应力。
e
2 b
4 2
( M )2 4( T )2 1
W
2W W
M 2 T 2 b (14 4)
M e M 2 T 2为当量弯矩, N mm; W 抗弯截面系数, 对于实心圆轴W 0.1d 3mm3;
e 轴的当量应力, MPa;
b 许用弯曲应力, MPa.
• 二、初步估算轴的直径
• (2)箱外零件至轴承支点的距离
l1
L
l3
l4
(l2
B) 2
l5 2
l3 轴承盖凸缘厚和螺钉头
厚,取l3 15 ~ 40mm;
l4 箱外零件至固定零件的
距离,取l4 15 ~ 20mm;
l5 带轮宽, mm;
L 轴承座孔长度, mm,见下表 :
注 : a为齿轮中心距, mm.
五、改善轴的受力状况,减小应力集中
d3
P n
9.55106 P 0.2d 3n
16
轴的扭切应力, MPa;
MPa
(14 2)
T 转矩, N mm;
WT
抗扭截面系数, mm3, 对于实心圆轴WT
d3
16
0.2d 3;
P 传递的功率, kW ;
n 轴的转速, r / min;
d 轴的直径, mm;
许用扭切应力, MPa.
• 心轴又分为两种
①转动心轴-轴是转动的(如火车车辆轴).
②固定心轴-轴是固定的(如自行车前轴).
起重机动滑轮轴
光轴-全轴各处直径相同的轴; 阶梯轴-各段直径不同的轴.
分类:
转轴---传递扭矩又承受弯矩
按承受载荷分有: 传动轴---只传递扭矩
类
心轴---只承受弯矩
型
直轴 光轴
一般情况下,直轴做成实心 轴,需要减重时做成空心轴
按承受载荷分有: 传动轴---只传递扭矩
类
心轴---只承受弯矩
型
本章只研究直轴
直轴
光轴
按轴的形状分有: 曲轴 阶梯轴
挠性钢丝轴
• 三、轴的基本组成 • 轴主要由轴颈、轴头和轴身所组成. • 轴颈-轴上被支承的部分(即装有轴承处)称为轴颈. • 轴头-轴上装转动零件的部分(即装轮毂处)为轴头. • 轴身-联接轴颈和轴头的部分称为轴身.
2) 配合段前端制成锥度; 为了便于轴上零件的拆卸,轴肩
高度不能过大。
结构不合理!
轴的结构工艺性: 为便于轴上零件的装拆,一般轴都做成从轴端逐渐向 中间增大的阶梯状。在满足使用要求的前提下,轴的结 构越简单,工艺性越好。零件的安装次序 装零件的轴端应有倒角,需要磨削的轴端有砂轮越程槽, 车螺纹的轴端应有退刀槽。
轴颈
轴身
轴头
§14-2 轴的材料 为了改善力学性能
轴的材料
种 碳素钢:35、45、50、Q235
类
正火或调质处理。
合金钢: 20Cr、20CrMnTi、40CrNi、
38CrMoAlA等
用途:碳素结构钢因具有较好的综合力学性 能,应用较多,尤其是45钢应用最广。合金 钢具有较高的力学性能,但价格较贵,多用 于有特殊要求的轴。
• 轴端挡圈和轴肩配合,或轴端挡圈和圆锥面配 合,均可对零件实现轴向的双向固定.
轴端挡圈
圆锥面
圆锥面
• (4)弹性挡圈与紧定螺钉
• ①弹性挡圈常与轴肩配合使用,对轴上零件实 现双向固定,常用于滚动轴承的轴向固定;
• ②紧定螺钉多用于光轴上零件的轴向固定,还
可兼作周向固定. 弹性挡圈
紧定螺钉
轴向力较小时, 可采用弹性挡圈或紧定螺钉来实现。
发动机
传动轴
后桥
• 2) 传动轴-只传递转矩而不承受弯矩或所受弯矩 很小的轴称为传动轴.如图示汽车的传动轴等.
• 特点:这类轴起传递动力和
• 运动的作用,主要发生
• 转扭动转心变轴形.
固定心轴
• 3) 心轴-只承受弯矩而不传递转矩的轴称为心轴.
• 特点:这类轴只起支承转动零件的作用,不传递转
•
矩,受力后主要发生弯曲变形.
轴肩
轴端挡圈
①② ③
④ ⑤⑥ ⑦
轴承端盖
三、轴上零件的固定 轴向固定由轴肩、套筒、螺母或轴端挡圈来实现。
齿轮受轴向力时,向右是通过4、5间的轴肩,并由6、7间的轴肩顶在滚动轴 承的内圈上;向左则通过套筒顶在滚动轴承的内圈上。带轮的轴向固定是靠1、 2间的轴肩和轴端当圈。
①②
③
④ ⑤⑥ ⑦
双向固定
• 轴肩-我们把阶梯轴上截面变化处叫做轴肩. • 作用: 主要起定位作用,还可以起轴向固定作用.
按轴的形状分有:
阶梯轴
功用:用来支撑旋转的机械零件,如齿轮、 带轮、凸轮等。
分类:
转轴---传递扭矩又承受弯矩
按承受载荷分有: 传动轴---只传递扭矩
类
心轴---只承受弯矩
型
直轴 光轴
按轴的形状分有: 曲轴 阶梯轴
功用:用来支撑旋转的机械零件,如齿轮、带轮、 凸轮等。
分类:
转轴---传递扭矩又承受弯矩
五、改善轴的受力状况,减小应力集中
当轴上有两处动力输出时,为了减小轴上的载荷,应将 输入轮布置在轴的中间。
又如当动力从两轮输出时:
a.当输入轮布置中间时, b.当输入轮布置在两轮的另一侧时,
轴的最大转矩为T1;
轴的最大转矩为T1+T2.
输出 输入 输出
输出 输出 输入
T1
合理
T2
Tmax = T1
(1)合理布置轴上零件的位置可以改善轴的受力状况.
例如起重机卷筒的两种布置方案:
心轴
此时,d转>d心
转轴
方案 a
T
方案b
a. 大齿轮和卷筒联成
W
b. 大齿轮与卷筒分开
一体,转矩经大齿轮直接传给卷筒,
布置在轴上,
W
故此时卷筒轴只受弯矩而不传递转矩. 在起重载荷W时,此时卷筒轴