单片机交通灯实验报告(汇编语言)
单片机实训报告交通灯

一、实训背景与目的随着城市化进程的加快,交通流量日益增大,传统的交通灯控制系统已经无法满足日益复杂的交通需求。
为了提高交通效率,减少交通拥堵,本实训项目旨在设计并实现一套基于单片机的智能交通灯控制系统。
通过本实训,学生可以深入了解单片机原理,掌握单片机编程与调试技巧,同时锻炼动手实践能力和团队协作精神。
二、系统设计1. 系统组成本系统主要由以下模块组成:单片机模块:采用AT89C52单片机作为核心控制单元,负责接收传感器信号、处理数据、控制交通灯状态等。
传感器模块:包括红外传感器、地磁传感器等,用于检测车辆和行人,实时获取交通信息。
执行模块:包括LED灯、继电器等,用于驱动交通灯和信号灯。
显示模块:采用LCD显示屏,用于显示交通灯状态、倒计时等信息。
电源模块:为系统提供稳定电源。
2. 工作原理系统工作原理如下:(1)单片机初始化,设置各模块参数。
(2)单片机通过传感器模块检测交通情况,如车辆和行人数量。
(3)单片机根据检测到的交通情况,控制交通灯和信号灯的亮灯状态。
(4)LCD显示屏显示交通灯状态和倒计时信息。
(5)当系统检测到紧急情况时,如行人过马路,系统自动切换到紧急模式,确保行人安全。
三、硬件设计1. 单片机模块选用AT89C52单片机作为核心控制单元,具有以下特点:内置8K字节闪存,可存储程序和数据。
内置8位定时器/计数器,可进行定时或计数操作。
内置串行通信接口,可进行数据通信。
2. 传感器模块红外传感器:用于检测车辆和行人,实现自动控制。
地磁传感器:用于检测车辆行驶方向,实现左转和直行控制。
3. 执行模块LED灯:用于显示交通灯状态。
继电器:用于驱动信号灯。
4. 显示模块采用LCD显示屏,用于显示交通灯状态、倒计时等信息。
5. 电源模块采用DC 12V电源,为系统提供稳定电源。
四、软件设计1. 编程语言采用C语言进行编程,具有以下优点:语法简单,易于理解。
可移植性好,可在不同平台上运行。
单片机交通灯实习报告

一、实习背景随着我国城市化进程的加快,城市交通压力日益增大,交通拥堵问题日益突出。
为了提高交通效率,保障交通安全,交通信号灯控制系统的设计与研究显得尤为重要。
本实习项目旨在通过单片机技术,实现对交通灯的智能控制,提高交通路口的通行效率和安全性。
二、实习目的1. 熟悉单片机的基本原理和编程方法;2. 掌握交通信号灯控制系统的设计方法;3. 提高实际动手能力和问题解决能力;4. 培养团队协作精神和创新意识。
三、实习内容1. 硬件设计(1)单片机选型:选用STC89C51单片机作为核心控制器;(2)传感器选型:选用红外传感器检测车辆和行人流量;(3)显示屏选型:选用LCD显示屏显示交通灯状态和时间;(4)交通灯模块:采用LED灯实现红、黄、绿灯的显示;(5)按键模块:采用按键实现功能切换和参数设置。
2. 软件设计(1)系统初始化:单片机上电后,进行系统初始化,包括设置定时器、初始化I/O端口等;(2)数据采集:通过红外传感器采集交通流量数据,并进行处理;(3)数据处理与决策:根据采集到的交通流量数据,结合预设的算法和规则,计算出当前交通灯的信号配时;(4)信号控制:根据计算出的信号配时,控制交通灯的信号状态;(5)人机交互:通过按键实现功能切换和参数设置,并通过LCD显示屏显示交通灯状态和时间。
3. 系统测试与调试(1)硬件测试:检查电路连接是否正确,电源是否稳定,传感器、显示屏、交通灯模块是否正常工作;(2)软件测试:通过编写测试程序,验证系统功能是否满足设计要求;(3)调试:根据测试结果,对系统进行调试,确保系统稳定可靠地运行。
四、实习成果1. 设计并实现了基于单片机的交通信号灯控制系统;2. 系统能够根据实时交通流量自动调整红绿灯的切换时间,提高交通效率;3. 系统具有故障自诊断、手动/自动切换等功能,提高了系统的可靠性和实用性。
五、实习总结通过本次单片机交通灯实习,我掌握了单片机的基本原理和编程方法,熟悉了交通信号灯控制系统的设计方法,提高了实际动手能力和问题解决能力。
单片机实验报告(汇编语言+交通灯+工业控制等)
单片机应用技术实验报告BCD码加法一、实验内容编写一个程序实现多位BCD码加法。
假设单片机RAM中20H和30H中放着BCD码加数和被加数,结果放在20H开始的单元中。
要求考虑进位问题。
二、实验源程序ORG0630HMOV R0,#20HMOV R1,#30HMOV A,R7;R7中放着加数的个数MOV R6,A;R6中放置最后结果CLR CLOOP:MOV A,@R0;取加数ADDC A,@R1DA A;十进制加法调整MOV@R0,A;把结果送回20H开始的单元INC R0INC R1DJNZ R7,LOOPJC NEXT1;如果最后一次加法有进位,跳转到NEXT1SJMP NEXT2NEXT1:MOV@R0,#1;R0中放置进位INC R6NEXT2:NOPEND三、实验小结这个BCD码加法实验在编程是,遇到些语法小问题,后来在同组同学的探讨下纠正了过来。
当程序运行正确时我们有一种成就感,很高兴。
实验名称:P3.3输入、P0口输出一、实验内容(1)P3.3口做输入口,外接一脉冲,每输入一个脉冲,P1口按十六进制加一。
(2)P1口做输出口,编写程序,使P1口接的8个发光二极管L1—L8按16进制加一方式点亮发光二极管。
二、实验说明(1)P1口是准双向口,它作为输出口时与一般的双向口使用方法相同,由准双向口结构可知:当P1口作为输入口时,必须先对它置高电平,使内部MOS管截止,因内部上拉电阻是20KΩ—40KΩ,故不会对外部输入产生影响。
(2)延时子程序的延时计算问题。
对于延时程序DELAY:MOV R6,#00HDELAY1:MOV R7,#80HDJNZ R7,$DJNZ R6,DELAY1MOV、DJNZ指令均需用两个机器周期,而一个机器周期时间长度为12/6.0MHZ,所以该段指令执行时间为:((80+1)×256+1)×2×(12÷6000000)=132.1ms三、实验步骤(1)P3.3用插针连至K1,P1.0—P1.7用插针连至L1—L8。
51单片机设计交通灯(汇编语言)
题目:智能交通灯控制系统班级:p09电气四班姓名:刘强0903110429一、任务:设计并制作一个城市交道口交通灯控制糸统二、要求:根据下图交道口模型,装上交通灯。
交道口模型如图所示。
交通灯控制规则如下:1)每个街口有左拐、右拐、直行及行人四种指示灯。
每个灯有红、绿两种颜色。
自行车与汽车共用左拐、右拐和直行灯。
2)共有四种通行方式:①车辆南北直行、各路右拐,南北向行人通行。
南北向通行时间为1分钟,各路右拐比直行滞后10秒钟开放。
②南北向左拐、各路右拐,行人禁行。
通行时间为1分钟。
③东西向直行、各路右拐,东西向行人通行。
东西向通行时间为1分钟,各路右拐比直行滞后10秒钟开放。
④东西向左拐、各路右拐。
行人禁行。
通行时间为1分钟。
3)在通行结束前10秒钟,绿灯闪烁直至结束。
1, 基本部分:按照上述控制要求,用发光二极管代替交通灯,用PROTEUS绘制电路图,并仿真调试实现之。
2, 发挥部分:1.有倒计时时间显示。
2若交道口出现紧急情况,交警可将糸统设置成手动:全路口车辆禁行、行人通行。
紧急情况结束后再转成自动状态。
3当有119、120等特种车辆通过时,糸统自动转为特种车放行,其它车辆禁止状态。
特种车辆通过15秒钟后,糸统自动恢复,用模型车演示。
4其它自选措施。
智能交通灯控制系统1.系统功能的确定功能一:可以实现红绿灯的转换以及控制路口的基本功能。
功能二:有倒计时功能和最后十秒绿灯闪烁的功能。
功能三:出现紧急情况时,警察可以手动控制特殊状态,并维持交通。
功能四:119或120等特种车经过时,可转换成为特种车道行驶状态,并在情况消除后15秒,恢复原状。
2.方案论证2.1方案一:如下图所示,为proteus仿真图。
其中,P1,P0端口的8位分别来控制东西,南北方向的红绿灯。
且运用了4个74LS164的8位移位寄存器(串行输入,并行输出)来控制4个LED的数码显示,通过AT89C51单片机的P3.0,P3.1两个扩展端口来接4个并行连接的74LS164的DIN和CLK两个端口来显示倒计时的功能,这会产生乱码使得显示杂乱,而主程序以顺序执行为主,其中穿插着对P3.7的端口高低电平的测试和跳转语句来实现功能三,并且功能一、二在主程序中实现,没有功能四的的实现程序。
单片机交通灯实验汇编语言程序

单片机交通灯实验汇编语言程序经过几天的整理,终于将网络上得到交通灯仿真文件,用汇编自己编写了一个程序,实验结果完全符合本人的思路,实验成功。
程序比较长,估计还会用更好的办法重新写。
编写心得是:单片机编程,不一定要背指令,用时可以查,也不必去默写子程序,用时还是可以查,但是,很关键的就是,你的程序,你自己要清楚整个的执行过程,也就是单片机的执行流程。
而在实际的应用中,要注意驱动电路的设计,特别是单片机上电复位输出高电平可能造成的影响。
程序如下:如果网页显示格式错乱可从51hei/f/jtda.rar 处下载. ORG 0000HSTART:MOV R2,#30SU0:MOV P0,#00HMOV P1,#00HMOV P2,#00HMOV P3,#00111111BMOV A,R2MOV R4,AMOV A,R4MOV R0,AMOV B,#5DIV ABMOV B,#3MUL ABMOV R1,ASETB P0.4SETB P0.7SETB P2.2SETBP2.5AJMP KEYSU1A: DEC R0DEC R1SUL5: CJNE R1,#5,SUL6SETB P2.7SUL6: CJNE R1,#4,SUL7SETB P2.7SUL7: CJNE R1,#3,SUL1SETB P2.7SUL1: CJNE R1,#2,SUL2SETB P2.7SUL2: CJNE R1,#1,SUL3SETB P2.7SUL3: CJNE R1,#0,SUL4MOV A,R0MOV R1,ACLR P2.5CLR P0.7SETB P0.5SETB P2.4SUL4: CJNE R0,#0,KEYAJMP SU0BKEY: JB P3.5,KEY1 LCALL DELAY MOVR2,#45KEY1:JB P3.2,KEY2 LCALL DELAY MOV R2,#60KEY2:JB P3.3,KEY3 LCALL DELAY MOV A,R2 ADD A,#5 MOV R2,A CJNE R2,#95,DD MOVR2,#95KEY3:JB P3.4,DD LCALL DELAY MOV A,R2 SUBB A,#5 MOV R2,A CJNE R2,#0,DD MOV R2,#0DD:MOV R3,#50;数码1DD1: MOV P1,#00H MOV A,R0 MOV B,#10 DIV AB MOV DPTR,#TAB MOVC A,@A+DPTR MOV P1,A SETB P0.0 LCALL DELAY1 CLR P0.0 MOV A,B MOV DPTR,#TAB MOVC A,@A+DPTR MOV P1,A SETB P0.1 LCALL DELAY1 CLR P0.1;数码2 MOV。
单片机交通灯实验报告

单片机交通灯实验报告实验目的:1.熟悉单片机的基本工作原理和编程方法。
2.学习如何使用单片机控制交通灯的运行。
3.加深对电子元器件和电路原理的理解和掌握。
实验器材:1.51系列单片机开发板:包括单片机主控板、显示器板、外部扩展板等。
2.LED灯:红色、黄色、绿色各一颗。
3.电阻:用于限流。
4.连接线:用于连接各个电子元器件。
实验原理:在交通中,红灯代表停止、黄灯代表警告、绿灯代表通行。
在本实验中,我们将使用单片机控制三个LED灯实现交通灯的运行。
具体原理如下:1.使用单片机的IO口控制LED灯的亮灭。
2.根据交通灯的运行状态,通过改变LED灯的亮灭顺序来模拟交通的运行。
实验步骤:1.连接电路:将三个LED灯连接到单片机的IO口,并通过电阻限流。
2.编写程序:使用C语言编写程序,在主函数中设置交通灯的运行状态和亮灭顺序。
3.烧写程序:将编写好的程序烧写到单片机中。
4.运行实验:启动单片机,观察LED灯的亮灭情况,验证交通灯是否能正常工作。
实验结果:经过实验,我们成功地实现了单片机交通灯的控制。
在程序运行过程中,红灯先亮,表示停止;然后黄灯亮,表示警告;最后绿灯亮,表示通行。
整个过程循环不断,符合实际交通灯的运行规律。
实验总结:通过这次实验,我深入了解了单片机的基本工作原理和编程方法,掌握了使用单片机控制交通灯的技巧。
同时,我也加深了对电子元器件和电路原理的理解和掌握。
这些知识将对我今后的学习和工作产生积极影响。
然而,在实验过程中也遇到了一些问题。
比如,如果LED灯连接不正确或程序编写有误,交通灯可能无法正常运行。
因此,在进行单片机实验时,我们需要仔细检查电路连接和程序编写,确保一切正常。
总之,单片机交通灯实验是一次充满趣味和挑战的实践活动。
通过这次实验,我不仅学到了许多知识,而且培养了动手能力和实践能力。
希望将来能有更多这样的实验机会,继续提升自己的电子技术水平。
基于单片机的交通灯的设计报告(汇编语言)
交通灯的设计报告摘要:近年来随着科技的飞速发展,单片机的应用正在不断深入,同时带动传统控制检测技术日益更新。
在实时检测和自动控制的单片机应用系统中,单片机往往作为一个核心部件来使用,仅单片机方面知识是不够的,还应根据具体硬件结构软硬件结合,加以完善。
十字路口车辆穿梭,行人熙攘,车行车道,人行人道,有条不紊。
那么靠什么来实现这井然秩序呢?靠的就是交通信号灯的自动指挥系统。
交通信号灯控制方式很多。
本系统采用MSC-51系列单片机AT89C51和74LS47来设计交通灯控制器,实现了能根据实际车流量通过AT89C51芯片的P1口设置红、绿灯熄亮时间的功能;红绿灯循环点亮,绿灯熄灭时黄灯闪烁3秒(交通灯信号通过P1口输出,显示时间直接通过P0、P2口输出至二个对应的双位数码管)。
本系统实用性强、操作简单、扩展功能强。
关键词:单片机交通灯时间一、课题设计需要实现的系统功能:1.AB方向亮绿灯60s,然后黄灯闪烁3次,每次一秒(亮灭各40ms),红灯40s,同时CD方向红灯65s,绿灯35s,黄灯闪烁3s2.各路灯用LED模拟显示,同时用七段数码管显示两路的倒计时时间3.利用键盘可修改灯亮时间4.PC机设置灯亮时间,利用PC与单片机串口通信实现二、单片机概述单片机微型计算机是微型计算机的一个重要分支,也是颇具生命力的机种。
单片机微型计算机简称单片机,特别适用于控制领域,故又称为微控制器。
通常,单片机由单块集成电路芯片构成,内部包含有计算机的基本功能部件:中央处理器、存储器和I/O接口电路等。
因此,单片机只需要和适当的软件及外部设备相结合,便可成为一个单片机控制系统。
单片机经过1、2、3、3代的发展,目前单片机正朝着高性能和多品种方向发展,它们的CPU功能在增强,内部资源在增多,引角的多功能化,以及低电压底功耗。
三、芯片简介3.1、AT89C51芯片简介AT89C51单片机内部结构AT89C51单片机包含中央处理器、程序存储器(ROM)、数据存储器(RAM)、定时/计数器、并行接口、串行接口和中断系统等几大单元及数据总线、地址总线和控制总线等三大总线。
51单片机交通灯设计汇编实验
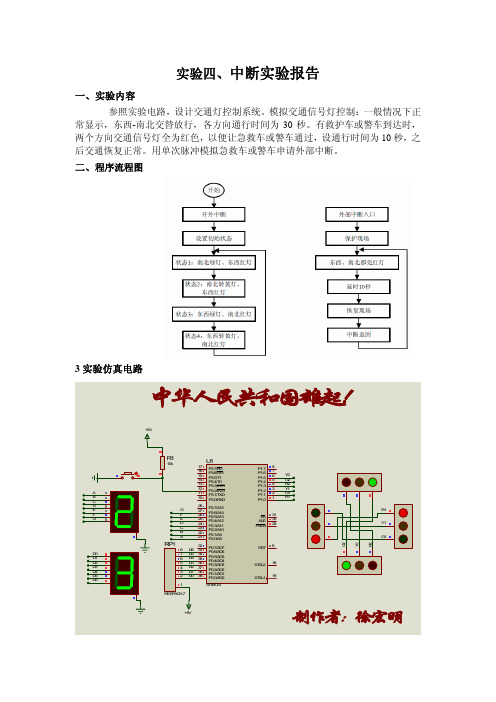
实验四、中断实验报告一、实验内容参照实验电路,设计交通灯控制系统。
模拟交通信号灯控制:一般情况下正常显示,东西-南北交替放行,各方向通行时间为30秒。
有救护车或警车到达时,两个方向交通信号灯全为红色,以便让急救车或警车通过,设通行时间为10秒,之后交通恢复正常。
用单次脉冲模拟急救车或警车申请外部中断。
二、程序流程图3实验仿真电路4、实验程序ORG 0000HJMP MAINORG 0003H ;外部中断0的入口地址JMP X0_INTORG 000BH ;T0中断的入口地址JMP T0_INT;*************************************** MAIN:MOV TMOD, #01HMOV TH0, #3CHMOV TL0, #0B0HMOV R1, #20 ;定时1sSETB TR0SETB ET0SETB PT0SETB EX0SETB IT0SETB EAMOV SP, #60HM_LOOP:;***************************************N_B:MOV 30H, #11H ;南北MOV P1, 30HMOV R5, #30 ;CALL DISPLAYMOV R2, #27LOOP1:CALL WAIT_1SDJNZ R2, LOOP1 ;判断是否过了27s ;--------------------------MOV 30H, #21HMOV P1, 30HMOV R2, #3LOOP11:CALL WAIT_1SDJNZ R2, LOOP11 ;判断是否过了3秒;*************************************** D_X:MOV 30H, #0AH ;东西MOV P1, 30HMOV R5, #30CALL DISPLAYMOV R2, #27LOOP2:CALL WAIT_1SDJNZ R2, LOOP2 ;判断是否过了27s ;--------------------------MOV 30H, #0CHMOV P1, 30HMOV R2, #3LOOP22:CALL WAIT_1SDJNZ R2, LOOP22 ;判断是否过了3秒JMP M_LOOP;*************************************** WAIT_1S: ;等待新秒出现JNB 20H.0, $CLR 20H.0DEC R5CALL DISPLAYRET;-----------------------------DISPLAY:MOV A, R5MOV B, #10DIV ABMOV DPTR, #TAB1MOVC A, @A + DPTRMOV P2, AMOV A, BMOV DPTR, #TAB1MOVC A, @A + DPTRMOV P0, ARETTAB1:DB 3FH, 06H, 5BH, 4FH, 66H, 6DH, 7DH, 07H, 7FH, 6FH ;***************************************X0_INT:MOV P1, #09H ;全部红灯PUSH ACCPUSH BPUSH PSWSETB RS0 ;换工作区MOV R5, #10 ;倒计时显示CALL DISPLAYMOV R1, #20 ;定时1s;----------------MOV R2, #10 ;倒计时LOOP3:CALL WAIT_1SDJNZ R2, LOOP3 ;判断是否到了10s ;----------------POP PSW ;恢复原区CALL DISPLAY ;显示原值MOV P1, 30H ;显示原灯POP BPOP ACCRETI;-----------------------------T0_INT: ;T0中断,高优先级 MOV TL0, #0B0HMOV TH0, #3CH ;50ms中断一次DJNZ R1, EXIT_T0MOV R1, #20 ;定时1sSETB 20H.0 ;每到一秒就置一EXIT_T0:RETI;*************************************** END。