大小球分拣传送PLC控制
plc大小球分拣
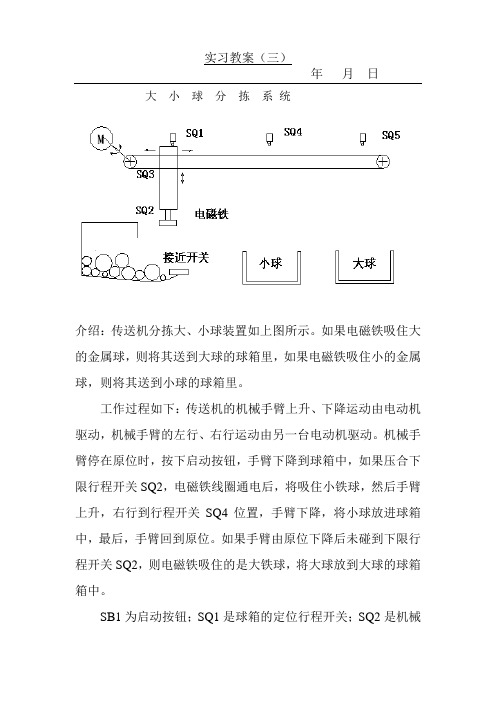
大小球分拣系统
介绍:传送机分拣大、小球装置如上图所示。
如果电磁铁吸住大的金属球,则将其送到大球的球箱里,如果电磁铁吸住小的金属球,则将其送到小球的球箱里。
工作过程如下:传送机的机械手臂上升、下降运动由电动机驱动,机械手臂的左行、右行运动由另一台电动机驱动。
机械手臂停在原位时,按下启动按钮,手臂下降到球箱中,如果压合下限行程开关SQ2,电磁铁线圈通电后,将吸住小铁球,然后手臂上升,右行到行程开关SQ4位置,手臂下降,将小球放进球箱中,最后,手臂回到原位。
如果手臂由原位下降后未碰到下限行程开关SQ2,则电磁铁吸住的是大铁球,将大球放到大球的球箱箱中。
SB1为启动按钮;SQ1是球箱的定位行程开关;SQ2是机械
手臂下降时下限行程开关,除限位作用外还要判断机械手臂抓的是大球还是小球;SQ3是机械手臂上升时限位行程开关;SQ4和SQ5分别是小球球箱和大球球箱定位行程开关。
一、输入输出地址表
SB1为启动按钮,SQ1是球箱的定位行程开关,SQ2是机械手臂下降时下限行程开关,除限位作用外还要判断机械手臂抓住的是大球还是小球;SQ3是机械手臂上升时限位行程开关;SQ4和SQ5分别是小球球箱和大球球箱定位行程开关。
二、状态流程图。
大、小球分拣传送机械PLC控制梯形图的设计与调试

目录引言 (1)第一章课程设计要求及任务 (2)1.1设计要求 (2)1.2设计任务 (2)第二章系统总体方案设计 (2)2.1大、小球分拣传送机械系统的功能 (2)2.2大、小球分拣传送机械系统的结构 (3)2.3大、小球分拣传送机械的设计思想 (3)2.4主电路设计 (3)2.5确定I/O信号数量,选择PLC的类型 (3)2.6确定电器元件I/O分配表 (4)2.7控制系统的接线图 (4)第三章控制系统设计 (4)3.1大、小球分拣传送机械的运行流程 (4)3.2大、小球分拣传送机械控制程序流程图 (6)3.3大、小球分拣传送机械控制程序的梯形图 (6)3.4大、小球分拣传送机械控制程序的语句表 (6)第四章结束语 (9)参考文献 (10)引言本课程设计主要对PLC程序的结构、特点、各器件的性能以及对被公职对象的控制过程进行具体研究,并通过PLC来实现对大小球分拣系统的控制,随着工业自动化、机械化进程的加速,自动控制正在逐步取代传统的人工控制,在改善工作人员的工作环境的同时也使生产效率大大提升,为了最大限度的满足被控制对象和生产过程的控制。
在本课程设计中对于一些原来用继电接触器线路不易实现的要求,试用PLC后,将很容易实现。
在满足控制要求前提下,采用多种控制模式来对被控制对象进行安全可靠的控制操作,使功能更加全面,其中包括手动控制,自动控制模式,使其操作更强,便于企业各类人员操作,另外,该系统的手动控制模式,也使生产设备的检测和维护更加方便。
关键字PLC,大小球分拣,机械臂第一章课程设计要求及任务1.1设计要求1.大、小分拣传送机械示意图2. 控制要求:(1)机械臂起始位置在机械原点(见图),为左限、上限并有显示。
(2)有起动按钮和停止按钮控制运行,设停止时机械臂必须已回到原点。
(3)起动后,机械臂动作顺序为:下降→吸球→上升(至上限)→右行(至右限)→下降→释放→上升(至上限)→左行返回(至原点)。
项目7:大小球分类传送plc

X7
X17
(b)改写后
X10 X14
S27 X15
S28
X16 X17
图7-18复杂选择性流程的改写
选择性流程里嵌套并行性流程的编程S 20 NhomakorabeaX0
X1
S 21 X2
S 22
S 23 X3
S 24
S 25 X4
S 26
S 27 X5
S 28
X6
X7
S 29
图7-19 选择性分支里嵌套并行性分支
选择性汇合后的并行性分支的编程
S20
X0 X1
S21 X2
S22
X3 X7
S29
X4 S23
X5 S24
X6
X10 X11
S25 X12
S26
X13 X17
(a)改写前
X14 S27
X15 S28
X16
S20
X0 X1
S21 X2
S22 X3 X7
S29
X0 X10
X4
X11
S23 S25
X5 X12 S24 S26
X6
X13
S21 T1
Y002 车道:黄 T1 K100
S22
Y1 车道:红
T2 K50 C0 T5
对状态S33动作次数
计数的计数器触点 C0 在第5次计数时动作
S30 T2
S31 T3
S32 T4
S33 C0 T5
S34
T6
RET END
Y005 人行道:红 RST C0 Y006 人行道:绿
T3 K150
Y0 SET S21
S 21 X1
S 22
SET S24
PLC在大小球分拣传送装置中的应用
设计题目名称:PLC在大小球分拣传送装置中的应用学生姓名:周树奎摘要本设计是研制自动化程度高、工作可靠、稳定的机械臂控制系统,使其完成分拣大小球的全自动的机械设计。
本文阐述了应用西门子公司的具有高性能价格比的微型可编程控制器S7-200 PLC的自动分拣大小球控制系统。
该系统充分利用了学习中讲述的可编程控制器(PLC)的多方面的设计知识和方法,实现了机械臂从原点的下降、判断、抓取、上升、摆动、释放、还原等一系列的动作完成这一工序。
这一控制系统的实现和应用,充分体现了PLC系统在工业现场的应用,PLC用存储逻辑代替接线逻辑,大大减少了控制设备外部的接线,使控制系统设计及建造的周期大为缩短,同时维护也变得容易起来。
更重要的是使同一设备经过改变程序改变生产过程成为可能,根据设计和不同的需求改变数据和状况,还可以使其应用的范围更加广泛。
关键词:西门子、可编程控制器、自动控制、大小球分拣目录第一章PLC系统设计的基础知识 (1)1.1 PLC控制系统的构成与特点 (1)1.1.1PLC控制系统的构成 (1)1.1.2 PLC控制系统的特点 (2)1.2 PLC的产生与定义 (2)1.3 PLC的结构 (3)1.3.1 LC的基本组成 (3)1.4 PLC的应用、分类及程序语言 (6)1.4.1 PLC的应用 (6)1.4.2 PLC的分类 (7)1.4.3 PLC程序语言 (7)第二章PLC的基本指令介绍 (8)2.1 基本逻辑指令 (8)2.1.1 位逻辑指令 (8)2.1.2 置位/复位指令 (10)2.1.3 定时器指令 (10)2.2 顺序控制指令 (11)2.2.1 顺序控制指令介绍 (11)2.2.2 顺控指令的使用 (11)2.2.3 使用说明 (12)第三章PLC在大小球分拣系统中的设计 (13)3.1 PLC分拣大小球的控制要求 (13)3.2分拣大小球的系统结构示意图 (14)3.3分拣大小球控制接线图 (15)3.3.1 大小球分拣控制电路图 (15)3.3.2 接线时注意事项 (15)第四章大小球分拣系统的PLC程序设计 (17)4.1 I/O点分配 (17)4.2 程序指令表 (17)4.3 状态流程图 (18)4.4 程序梯形图 (18)4.5 程序调试 (25)总结 (26)参考文献 (27)致谢 (28)江苏建筑职业技术学院毕业设计说明书- 1 - 第一章 PLC 系统设计的基础知识1.1 PLC 控制系统的构成与特点1.1.1 PLC 控制系统的构成 通常机械设备的电气控制主要由控制电器、保护电器和电动机等组成。
plc大小球分拣系统课程设计
学院Henan Polytechnic Institute 毕业设计(论文)题目__________班级__________姓名__________指导教师__________前言系统在社会各行各业如:物流配送中心、邮局、采矿、港口、码头、仓库等行业得到广泛运用,分拣系统能够大大提高企事业单位该环节的生产效率。
机械臂自动分拣机构的积极作用正日益为人们所认识,它能部分地代替人的劳动并能达到生产工艺的要求,遵循一定的程序、时间和位置来完成工件的筛选与传送。
因为它能大大地改善工人的劳动条件,加快实现工业生产机械化和自动化的步伐,因此,受到各先进单位的重视并投入了大量的人力物力加以研究和应用,尤其在高温、高压、粉尘、噪声的场合,应用得更为广泛。
在我国,近代几年来也有较快的发展,并取得一定的成果,受到各工业部门的重视。
在生产过程中,经常要对流水线上的产品进行分拣,本课程设计拟设计大小球分拣传送机控制系统的PLC设计,采用的德国西门子S7-200 系列(cpu-224)PLC,对机械臂的上下、左右以及抓取运动进行控制,用于分捡大小球的机械装置。
我们利用可编程技术,结合相应的硬件装置,控制机械手完成各种动作。
关键词:大小球分拣控制系统;PLC;行程开关目录第1章设计内容 (3)1.1 大小球分拣传送机械控制系统设计内容简介 (3)1.2 大小球分拣传送机械控制系统功能分析 (4)第2章大小球分拣传送系统的硬件电路 (5)2.1按控制要求进行功能分析 (5)2.2确定I/O信号数量,选择P LC的类型 (6)2.3分拣大小球控制的I/O接线图 (6)2.4分拣大小球控制的电器元件配置表 (7)第3章大小球分拣传送系统的软件设计 (8)3.1分拣大小球控制的运行框图 (8)3.2分拣大小球控制程序的梯形图 (9)3.3分拣大小球控制程序的指令表 (11)第4章软件硬件调试 (14)心得体会 (14)参考文献 (15)第1章设计内容1.1 大小球分拣传送机械控制系统设计内容简介学院此次安排我们进行了电气自动化的毕业设计,对我们系统总结学习知识是很有益处的。
基于PLC的大小球分拣系统设计
出端口上搭建一个 H 桥来实现控制电机的左转和右转。将原
理调试好的程序改写成有两个端口输出来控制电机的右转, 即现在采用的Y10、Y12控制电机右转。同样采用Y11、Y13控
制电机的左转。
控制小球移动的主要功能梯形图中,当下限位闭合的时 候,机械臂将会走小球分支,让置位线圈 S22 得电,电磁铁 开始吸小球,并且Y3的闭合,使到与组态连接的M103得电, 同时与组态进行实时的数据监控,时间继电器T1开始计时时 间为1S。对部分指令程序调试如下1.3所示。
2.设计内容
当输送机处于起始位置时,上限位开关和左限位开关开 关处于闭合的状态,原位指示灯此时闪亮。启动装置后,捡
球装置下行。如果电磁铁碰到大球时上限位动作,而下限位
开关不动作;如果电磁铁碰到小球时下限位开关动作。电磁 铁下降后电磁铁吸球,吸到球后上升,到上限位后机械臂右 移动。如果吸的是小球,则机械臂到小球位,电磁杆下降, 电磁铁失电释放小球到小球的箱子。如果吸取的是大球,则
机械臂到大球位,电磁杆下降,电磁铁失电释放大球到大球
的箱子。吸起小球后,则捡球装置向上行,碰到上
限位开关后,捡球装置向右行;碰到右限位开关(小球
的右限位开关)后,再返回到原位。如果吸起的是大球,捡 球装置右行碰到另一个右限位开关(大球的右限位开关)后, 再向下行,碰到下限位开关后,将大球释放到小球箱里,然 后返回到原位。 然而,在设计机械臂的时候,左限位、小球限位开关和 大球的限位开关的放置,影响到机械臂的移动是否能够触及
到限位开关。所以要对电机上的位置,选定好要设计的左限
位开关、小球限位开关、大球限位开关。并能按照给定的程 序,机械臂能够及时的碰及到限位开关,能够更好的控制好 大小球的分拣。
大小球分拣系统示意图如图1.1所示。
PLC控制大小球分拣传送机

PLC控制大小球分拣传送机1. 引言本文档介绍了如何使用PLC(可编程逻辑控制器)控制大小球分拣传送机。
传送机是工厂自动化生产线中常见的设备,它可以将待分拣的物体按照不同的尺寸分拣到不同的位置。
本文档详细描述了PLC控制大小球分拣传送机的硬件结构、PLC 程序设计以及运行原理。
2. 硬件结构大小球分拣传送机的硬件结构主要包括以下几个部分: - 传送带:用于将物体从起点传送到分拣区域。
- 传感器:用于检测物体的尺寸。
- 分拣装置:根据检测到的尺寸,将物体分拣到不同的位置。
- PLC:负责控制传送带、传感器和分拣装置的运行。
3. PLC程序设计PLC程序设计是控制大小球分拣传送机的关键。
下面是一个简单的PLC程序的框图示例:START|- 检测传感器状态|- 如果感知到小球|- 传送带升起|- 推动小球到小球分拣位置|- 如果感知到大球|- 传送带升起|- 推动大球到大球分拣位置|- 传送带下降END在PLC程序中,首先会检测传感器的状态。
当感知到小球时,传送带会升起,然后将小球推动到小球分拣位置。
当感知到大球时,传送带会升起,然后将大球推动到大球分拣位置。
最后,传送带会下降,准备接收下一个物体。
4. 运行原理当PLC接收到输入信号后,按照程序的逻辑顺序执行相应的输出操作。
在本例中,PLC会根据传感器的输出信号,控制传送带的升降和分拣装置的运动,以实现大小球的分拣。
传送带通过电机驱动,可以根据PLC的控制信号控制其升降。
传感器通过感知物体的尺寸来产生输出信号,然后将该信号传送给PLC。
分拣装置根据PLC的控制信号,将物体推送到相应的分拣位置。
5. 总结本文档介绍了使用PLC控制大小球分拣传送机的原理和方法。
通过合理的硬件结构设计和PLC程序编写,可以实现精确而高效的物体分拣。
PLC应用技术项目九任务2 大小球分拣控制系统

图大小球分拣系统控制示意图
1.PLC外部接线图
2.梯形图程序
3.指令表
自评:
互评:
综合评价:
天津滨海职业学院
PLC应用技术
项目实训工单
姓名:
学号:
系(院):
专业班级:
辅导教师:
日期:年月日
项目九
1.巩固步进指令指令的用法。
2.巩固硬件接线与监控。
1.TVT-90学习机主机箱。(主机型号为FP0-C16T)
2.控制实验板。
3.连接导线若干。
控制要求:
(1)打开开关,系统判断分拣杆是否在原始位置(电磁阀Y4失电、LS1和LS3压合)。若不在原始位置,则自动调整到原始位置。
(2)当分拣杆牌原始位置时,系统开始工作:A)磁铁下降→碰到大球→吸起大球→达到上限位→右行至大球容器处→磁铁下降释放铁球→磁铁上升并退回原位;B)磁铁下降→碰到小球→吸起小球→达到上限位→右行至小球容器处→磁铁下降释放铁球→磁铁上升并退回原位。
(3)磁铁下降碰球时间为2s,大球还是小球由LS2的状态决定。考虑到工作的可靠性,规
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要大、小球分拣传送以其对人们生活的积极影响特别是在工业上的普遍应用不断被人们所认识,作为可操控机械,它能够部分地代替人的劳动并能达到生产工艺的要求,遵循事先设定的步骤来完成工件的分拣传送,大大地节省了人类的劳动时间,更因其能适应复杂的环境,从而改善了人们的工作环境。
随着科技的不断发展,在工业领域其应用范围不断增加,并取得了一定的成果。
本课题设计了大、小球的分类选择传送系统,采用日本三菱公司的FX2N系列PLC,对机械臂的上下、左右移动以及对球的抓取和释放的运动过程进行控制。
我们利用可编程控制技术,并结合相应的硬件装置,来控制机械臂完成各种动作,实现大小球的分类选择传送。
关键词:PLC , 大小球, 机械臂, 原点显示第一章概述1.1选题背景大、小球选择分类传送作为工业中器件选择传送的一个写照,在工业控制中它的应用领域不断拓宽。
它能够通过编程来完成各种预期的作业任务,并能在各种复杂环境中工作,在构造和性能上兼有人和机器各自的优点,尤其在人工智能方面大大地增加其效率,同时也改善了人类的工作环境与工作强度。
中国在科技发展方面发展水平较低,在工业中分拣传送劳动密集型还占有相当大的份额。
由于人的劳动能力有限,并且人不能持续长时间的高强度工作,因此在劳动效率上往往是制约企业发展的关键性因素,为了提高劳动效率,抢占市场份额,各个企业也不断的引进和更新自动化设备来提高效率,同时降低人的工作强度。
因而这种自动化控制在工业控制中有很大优势。
1.2可编程控制器介绍可编程控制器起源于20世纪60年代末期,70年代随着微处理器的出现,使其真正成为具有计算机特征的工业控制装置。
随着科技的不断进步,可编程控制器也更加适用于现代工业的需要。
可编程控制器未来主要朝着以下方向发展:进一步加快CPU处理速度;变革操作控制方式,以增加对输入输出快速反应能力;由整体结构向小型模块化结构发展,增加配置的灵活性,降低成本;进一步系统提高可靠性。
1.3控制要求本次设计的大、小球分类选择传送PLC控制要满足以下控制要求:机械臂起始位置在机械原点,为左限、上限并有显示;有起动按钮和停止按钮控制运行,停止时机械臂必须已回到原点; 起动后机械臂动作顺序为:下降→吸球→上升(至上限)→右行(至右限)→下降→释放→上升(至上限)→左行返回(至原点);机械臂右行时有小球右限(X4)和大球右限(X5)之分,下降时,当电磁铁压着大球时下限开关X2断开,压着小球时下限开关X2接通。
第二章硬件设计2.1 主电路设计大、小球分拣传送实质上是由电动机控制的机械臂完,其主电路就是电动机的正反转电路。
主电路电路图如图2-1所示。
KM4图2-1 大、小球分类选择传送PLC控制的主电路电路图2.2 I/O地址分配及接线图按照设计要求,我们设定好输入量与输出量,定义各个量的含义,并对它们进行地址分配。
本系统的I/O地址分配如表2-1所示表2-1 大、小球分类选择传送PLC控制的I/O地址分配根据控制要求,设定好各个量的地址分配之后,我们把其对应的I/O接线图绘制出来,其I/O接线图如图2-2所示。
图2-2 大、小球分类选择传送PLC控制的I/O接线图2.3元件的选择选按钮时,按照按钮的使用场合、控制回路要求、工作状态与工作情况等原则选择按钮。
其一般规格为交流500V,允许持续电流5A,红色按钮表示停止,绿色按钮表示启动。
根据这些我们选择实用的按钮。
行程开关有直动式、滚动式和微动式三种。
直动式行程开关结构简单,成本低,但容易烧蚀触头。
滚动式行程开关克服了直动式的缺点,但其结构复杂,价格也较高。
考虑到我们所做的系统比较小,我们选择体积小,动作灵敏,适用于小型机构的微动式行程开关。
接近开关是对接近它的物体有感知能力的一种位移传感器利用传感器对接近物体的敏感特性达到控制开关通断的目的。
通常分为霍尔接近开关,超声波接近开关,高频振荡式接近开关。
本设计中我们采用霍尔接近开关X6检测是否有球。
接触器主要用于远距离频繁接通和分断交直流主回路及大容量用电回路的低压控制电器。
根据负载特性、被控电路电流大小、被控电压等级以及控制电压等级等,我们选择交流电磁式接触器CJ12系列,它适用于交流50HZ,额定电压至380V,额定电流至600A 的电路。
本设计中电磁阀主要用于机械臂吸球与放球动作的控制,电磁阀线圈通电后产生电磁吸力将铁球吸住,线圈断电后,释放铁球。
电磁阀常用于机械控制,分为直动式、分布直动式和先导式,从实用性、经济性、可靠性等因素考虑,我们选择直动式电磁阀熔断器在电路中主要起短路保护作用,过载或短路时熔体发热而熔断,从而达到保护电路的目的。
它具有体积小,便于维护,价格低廉,分断能力强,限流能力好等优点,有NT、RT、RL、FA4等系列,我们选择额定分断能力100KA、最大额定电流400A的有填封闭管式熔断器RT15型作为电路熔断器。
在本设计中,我们要实现大、小球的分拣传送,实现其上下、左右移动,就要用到能实现正反转的交流异步电动机。
异步电动机主要用于拖动各种生产机械,结构简单,使用方便,运行可靠,成本低廉,效率较高。
第三章软件设计3.1系统流程图根据设计要求,对大、小球要分类传送的控制要求,画出系统流程图。
系统流程图如图3-1所示。
图3-1 大、小球分类选择传送PLC控制的系统流程图3.2顺序功能图顺序功能图如图3-2所示。
图3-2大、小球分类选择传送PLC控制的顺序功能图3.3梯形图和指令表系统的梯形图如图3-3所示。
图3-3 大、小球分类选择传送PLC控制的梯形图根据梯形图写出系统的指令表0 LD M80021 SET S02 STL S03 LD X14 AND X35 SET S206 STL S207 OUT Y08 LD X09 SET S2110 STL S2111 OUT Y112 LD X213 AND X614 SET S2215 LDI X216 AND X617 SET S2518 STL S2219 SET Y520 OUT T021 K1022 LD T023 SET S23 24 STL S2325 OUT Y226 LD X327 SET S2428 STL S2429 OUT Y330 LD X431 SET S2832 STL S2533 SET Y534 OUT T035 K1036 LD T037 SET S2638 STL S2639 OUT Y240 LD X341 SET S2742 STL S2743 OUT Y344 LD X545 SET S2846 STL S2847 OUT Y148 LD X249 SET S2950 STL S2951 RST Y552 OUT T153 K1054 LD T155 SET S3056 STL S3057 OUT Y2 58 LD X359 SET S3160 STL S3161 OUT Y462 LD X163 ANI X1464 SET S2065 RET66 END3.4程序分析电路接通后,M8002产生触发脉冲同时按下左限开关X1、上限开关X3对系统置位,显示原点Y0灯亮。
接着按下启动开关X0,系统启动,开始下行,Y1显示,到达下限X2时,进入选择顺序的两个分支电路。
如果此时吸盘吸起的是大球,则下限位开关X2的常开触点闭合,电磁阀Y5通电吸球,延时1秒后开始上升,Y2显示,到达上限X3后即右行;若是小球,则下限位开关X2常闭触点闭合吸球,其余过程同大球。
吸住小球向右运行,Y3显示,到达小球右限X4后开始下行(大球是在到达大球右限开关X5后开始下行),Y1显示。
到达下限X2之后电磁阀线圈Y5断电放球,然后延时1秒,机械臂开始上行,Y2显示,到达上限X3之后,开始向左移动,Y4显示,回到原点后,原点Y0显示。
第四章结论4.1系统调试打开三菱FX2N系列仿真软件,将梯形图程序输入到计算机,并连接好外部接线图,然后对程序进行调试。
首先,系统通电运行后,同时按下X1、X3,观察原点显示Y0,看机械臂是否在机械原点,并有显示。
然后,按下启动按钮X0,观察机械臂是否按照本设计设定的工作方式运行。
无误后,按下停止按钮,观察系统是否在完成本周期的工作后返回原点,并停留在初始步。
若运行过程中出错,则要认真查找出错原因,哪个环节出错,然后作出修改,并重新运行,直至运行结果完全正确。
4.2设计感想本次设计的大、小球分类选择传送PLC控制已经结束,纵观整个设计过程,我们从分析问题,到逐渐解决问题,并最终达到预期目的,可以说我收获很大。
通过理论分析和不断的实践使得问题得到较好的解决,系统的阐述了设计过程。
设计中我们用到流程图、梯形图和指令表,通过实践是我加深了对它们的理解,并熟练掌握了编程方法。
同时也认识到,作为新时代的大学生,在竞争如此激烈的社会环境里,动手实践和创新能力显得尤为重要,通过这次课程设计我还发现自己还存在诸多方面的不足。
理论知识终究不是实践能力,在实践面前一系列问题就会突然被发现,但是没有扎实的理论知识实践能力就大大削弱,要注重理论与实践相结合,并且要认认真真去做每一件事,大胆创新,从而不断提高自己的能力。