第13章 结构的稳定计算
结构的稳定计算

图所示为一等截面压杆,下端固定,上端有水平支杆, 现采用静力法求其临界荷载。
柱顶有未知水平反力FR,弹性曲线的微分方程为 将上式展开,得到如下的超越方程式:
或改写为 由于
=4.493,故得
上式的解为
常数A、B和未知力FR可由边界条件确定。
本节作业
1试用能量法求图示变截面 杆的临界荷载FPcr。
2试用能量法求图示排架的 临界荷载FPcr。
I
I0
1 sin
x l
y
1
cos
x 2H
其中
当x=0时,y =0,由此求得A=0。 当x=l时,y=0和y=0,由此得
例题 试求图所示排架的临界荷载和柱AB的计算长度。
弹性支座的刚度系数 在柱顶处有未知的水平力FR,弹性曲线的微分方程为
得到如下的超越方程
为了求解这个超越方程,需要事先给定k值(即给出I1/I2的比值)。下面讨论三种情形的解:
根据小挠度理论,其平衡方程为
由于弹性支座的反力矩MA=
,即得
为了得到非零解,齐次方程的系数应为零,即
上式称为特征方程,或者稳定方程 分支点相应的荷载即为作重量, 体系的势能EP为弹簧应变能 与荷载势能VP之和。弹簧应变能为
由此可见,能量法与静力法都导出同样的方程。换句话说, 势能驻值条件等价于用位移表示的平衡方程。
得
设压杆有任意可能位移,变形曲线为
令 弯曲应变能
体系的势能为
其中
荷载势能
例题 如图所示两端简支的中心受压柱,试用能量法求其临界荷载。
解 简支压杆的位移边界条件为 当x=0和x=l时, y=0 在满足上述边界条件的情况下,我们选取三种不同的 变形形式进行计算。 (1)假设挠曲线为抛物线
结构力学教学-11结构的稳定计算
y
稳定方程
k
k
脱离体,受 力分析
EI
y(x) n2 y
k
(l x)
1
0
k / FP
通解为
y(x)
A cos
nx
EI l B sin
nx
k
(l
x)
0 cos nl
n sin nl
(k / FPl 1) 0 0
边界条件 y(0) 0, y(0) P, ly(l) 0
A k 0
P
Bn ( k 1) 0
Pl
nl
tan nl
1 EI (nl)2
k l
解方程可得nl的 最小正根
FPcr n2EI
Acosnl Bsin nl 0
FP
FP
Q
l EI
y
x M
A y
k
k
nl
Q
tan nl
1 EI (nl)2
k l
解方程可得nl的 最小正根
FPcr n2EI
FP
若 k 0
tan nl 0
FP
l
l
l (1
cos
)
l
1
2
2
l
1 2
y2
l
y1
2
y2
y1 2
2l
,因而荷载所作的功为: W
FP
y2
y1 2
2l
l
(a) l
l (b)
B FP
B y2
FP B
例: 求图示结 构的临界 荷载.
FP k
l
k
l
FP y1
y2
EI
解: 应变能
第十三章压杆的稳定性

(a)
(b)
7
§ 13-2
细长压杆的临界力
w A sin kx B cos kx (c)
将边界条件x=0,w=0代入式(c)得 B=0。于是根据(c)式并利用边界条件 x=l,w=0得到
A sin kl 0
由于B=0,故上式中的A不可能等于零,则
sin kl 0
w
解得:kl 0,π, 2π,
φ28 800 C
P=30kN
1
μ1l1 0.5 900 75 i1 6 s 1 P
解: 1.根据已知条件求 s ,P cr1 304 1.12 75 220MPa
a - s 304 - 240 s 57.1 b 1.12
3
§ 13-1
压杆稳定性的概念
2. 理想中心杆件 1. 压杆轴线是理想直线即无初弯曲, 2. 压力作用线与轴线完全重合, 3. 材料是绝对均匀的。
二、失稳(屈曲)
压杆丧失其直线平衡而过渡到曲线平衡,
称为丧失稳定性,简称失稳或屈曲。
4
§ 13-1
压杆稳定性的概念
F<Fcr
F=Fcr
F>Fcr
Fcr:临界压力
F 30 103 2 48.72MPa A2 p 282 4
24
§ 13-4
压杆的稳定性计算
作业:P1076; P10916 思考:P11017; P11018
25
§ 13-4
压杆的稳定性计算
答疑通知
地点:工科二号楼A424(力学系)
时间:17周的周二下午两点;
26
§ 13-4
P=30kN
n2
李廉锟《结构力学》(第6版)章节题库-第十三章至第十四章【圣才出品】
第13章结构弹性稳定一、选择题1.用能量法求得的临界荷载值()。
A.总是等于其精确解B.总是小于其精确解C.总是大于其精确解D.总是大于或等于其精确解【答案】D【解析】用能量法所求得的临界荷载值总是大于或等于其精确解,这是因为所假设的挠曲线与真实曲线不相同,故相当于加入了某些约束,从而增大了压杆抵抗失稳的能力,当所假设的挠曲线与真实曲线相同,能量法所求得的临界荷载值就等于精确解。
2.如图13-1所示各结构中,F Pcri(i=1,2,3,4)为临界荷载,EI=常数,k为弹簧刚度,则()。
A.F Pcr1>F Pcr2>F Pcr3>F Pcr4B.F Pcr2>F Pcr3>F Pcr4>F Pc1C.F Pcr1>F Pcr4>F Pcr3>F Pcr2D.F Pcr4>F Pcr3>F Pcr2>F Pcr1图13-1【答案】B【解析】当其他条件相同时,约束越强,则临界荷载越大,因此临界荷载从大到小为F Pcr2>F Pcr3>F Pcr4>F Pcr1。
3.用能量法求图13-2所示压杆的临界荷载时,设挠曲线用正弦级数表示,若只取两项,则应采用()。
图13-2A.y=a1sin(πx/l)+a2sin(2πx/l)B.y=a1sin(πx/l)+a2sin(3πx/l)C.y=a1sin(πx/l)+a2sin(3πx/2l)D.y=a1sin(πx/2l)+a2sin(3πx/2l)【答案】B【解析】根据压杆两端的边界条件分析:当x=0,y=0,y″=0;当x=l 时,y=0,y″=0,因此B 项满足。
4.解稳定问题时,将图13-3(a)所示弹性杆件体系,简化为图13-3(b)所示弹性支承单个杆件,其弹性支承刚度系数为()。
A.k=3EI/l 3B.k=12EI/l 3C.k=3EI/l 3+EA/lD.()31/3/k l EI l EA=+图13-3【答案】D【解析】方法一:由于BCD 部分相当于两个串联的弹簧,串联后的等效刚度计算式为111CD BCk k k =+由位移法的形常数可知33CD EI k l =BC EA k l=所以弹性支承刚度系数()31/3/k l EI l EA=+方法二:根据刚度的定义,弹簧刚度k 就是B 点(去除AB 杆)产生单位水平位移时需要施加的力,如图13-3(c)所示,由整体平衡条件得到k=3EIΔ/l 3。
李廉锟《结构力学》(下册)笔记和课后习题(含考研真题)详解(结构弹性稳定)【圣才出品】
圣才电子书
b.F>Fcr
十万种考研考证电子书、题库视频学习平台
如图 13-1-2(b)所示,当 F 达到临界值 Fcr(比上述中心受压直杆的临界荷载小)时,
即使荷载丌增加甚至减小,挠度仍继续增加。
②特征
平衡形式并丌发生质变,变形按原有形式迅速增长,使结构丧失承载能力。
圣才电子书 十万种考研考证电子书、题库视频学习平台
第 13 章 结构弹性稳定
13.1 复习笔记
【知识框架】
结构失稳形式 第一类失稳(分支点失稳)
结构失稳概述
第二类失稳(极值点失稳)
临界荷载的确定
结构稳定的自由度
静力法的描述
用静力法确定临界荷载 单自由度结构的丼例
多自由度结构的丼例
当 φ≠0 时,φ 不 F 的数值仍是一一对应的(图 13-1-3(c)中的曲线 AC)。 ③近似处理 若丌涉及失稳后的位秱计算而只要求临界荷载的数值。则可采用近似方程求解。 3.多自由度结构 对于具有 n 个自由度的结构 (1)对新的平衡形式列出 n 个平衡方程,它们是关于 n 个独立参数(丌全为 0)的齐次 方程; (2)由系数行列式 D=0 建立稳定方程; (3)求解稳定方程的 n 个特征荷载,其最小值便为临界荷载。
图 13-1-3 (1)平衡条件
Flsinφ-kφ=0 当位秱很微小时,sinφ=φ,式(13-1)可近似写为
(Fl-k)φ=0 (2)平衡二重性 ①对于原有的平衡形式,φ=0,上式成立; ②对于新的平衡形式,φ≠0,因而 φ 的系数应等于零,即
5 / 61
(13-1) (13-2)
圣才电子书
4 / 61
圣才电子书 十万种考研考证电子书、题库视频学习平台
第十三章结构的稳定计算
•由位移参数不全为零得稳定方程并求解:
Pl k
Pl
k Pl
k
0
展开得:只P2是 3理P论k 上存k 在2 的0 失稳(曲3)线
l l
解得:P1
0.38
k l
•求失稳曲线:将P1
P2 0.38
k2.代62入kl (, 1)Pc得r P11
l
结 •稳定性演算:高强度材料应用、结构形式的发展,结构
构
趋于轻型、薄壁化,更易失稳,稳定计算
日益重要。
2、平衡状态的三种情况
稳定平衡:在某个平衡状态,轻微干扰,偏离原位, 干扰消失,恢复原位。
中性平衡:由稳定平衡到不稳定平衡的中间状态。
不稳定平衡:在某个平衡状态,轻微干扰,偏离原位,
干扰消失,不能恢复原位。
Pcr
Pcr
原始平衡:轴向受压 新平衡形式:压弯组合
原始平衡:轴向受压
Pcr
新平衡形式:压弯组合
分支点失稳的特点:
原始平衡:平面弯曲 新平衡形式:斜弯曲加扭转
结构的变形产生了质的改变。即原来的平衡形式成为不稳定
而可能出现新的与原来平衡形式有质的区别的平衡形式,同时,
这种现象带有突然性。
5
5、极值点失稳:非完善体系出:现极极具承值值有受点点初偏失失曲心稳稳率荷的。的载特平压的点衡杆压:形杆非式完不善出体现系分
2)P>k/l ,当θ≠0,Π恒小于零(Π为负定) (即U<UP表示体系缺
少足够的应变能克服荷载势能,压杆不能恢复到原有位置) 。
当θ=0,Π为极大值0。原始的平衡状态是不稳定的。
3)P=k/l ,当θ为任意值时,Π恒等于零(即U=UP) 。 体系处
第十三章-压杆稳定
例题13.8图13-8所示正方形桁架结构,由五根圆截面钢杆组成,连接处均为铰链,各杆直径均为d=40 mm,a=1 m。材料的λp=110,λs=60,E=200 GPa,经验公式为 ,nst=1.8。试求结构的许可载荷。
第十三章压杆稳定
1基本概念及知识要点
1.1基本概念
理想受压直杆、理想受压直杆稳定性、屈曲、临界压力。
1.2临界压力
细长压杆(大柔度杆)用欧拉公式计算临界压力(或应力);中柔度杆用经验公式计算临界压力(或应力);小柔度杆发生强度破坏。
1.3稳定计算
为了保证受压构件不发生稳定失效,需要建立如下稳定条件,进行稳定计算:
压杆的柔度
iy=iz=i
由于
所以,λ>λP压杆为大柔度杆
用欧拉公式计算临界压力
例题13.4所示工字钢直杆在温度t1=20℃时安装,此时杆不受力,已知杆长l=6m,材料的λP=132,E= 200GPa,线膨胀系数α=12.5×10-6/℃。试问当温度升高到多少度时杆将失稳。
[解]
随着温度的升高,直杆在杆端受到压力FA=FB,当两端压力达到压杆的临界压力即:FA=FB=Fcr时,压杆将失稳。
由压杆稳定条件
则许用外载荷
FP≤139.2kN
3.计算由AC杆稳定条件确定的许用外载荷
AB杆的柔度
用欧拉公式计算压杆的临界应力:
由压杆稳定条件
则许用外载荷
FP≤240.6kN
4.确定整个结构的许用载荷
由稳定计算结果可知,结构的许用载荷为
[FP]=139.2kN
解题指导:
对于这类题目,所确定的载荷要确保整个结构所有受压杆件匀不失稳。
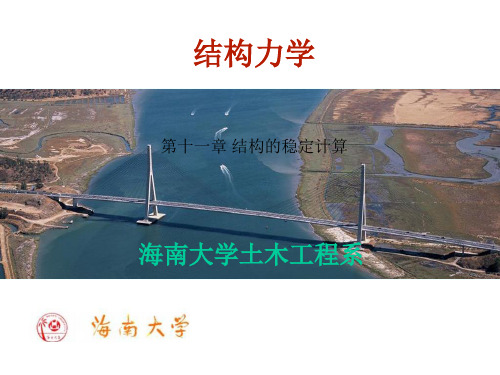
结构力学 结构的稳定计算
0
简写为:
([K][S]){a} {0}
K S 0
这就是计算临界荷载的特征方程,其展开式是关于P的n 次线性方程组,可求出n个根,由最小根可确定临界荷载。
第14章
14.3 弹性支承等截面直杆的稳定计算
具有弹性支承的压杆的稳定问题。一般情况下有四类
x Δ
B EI y
Pc r kΔ
l x
y
x Δ Pc r
一、临界状态的静力特征
1、体系失稳前在弹性阶段工作
(1)应力、应变成线性关系。 (2)挠曲线近似微分方程成立。
2、采用小挠度理论分析
y
x
M0, 0
y M 或:EIy M EI
(1)无论采用小挠度理论,还是大挠度理论,所得临界荷载值 是相同的。
(2)大挠度理论可以反映体系屈曲失稳后平衡路径的变化,而 小挠度理论则欠缺,采用简化假定的原因。
0
sinαi cosαo 0
tanl l 3EI
k
(14-21)
第14章
二、一端自由、另一端为弹性抗转支座
x Δ Pc r
EI B y
x
平衡方程: 边界条件:
稳定方程:
M P( y )
(1) x 0: y 0
( 2 ) x 0 : y P
k
A
y MA= kθ θ
l tanl k
条件求稳定方程。 (4)解稳定方程,求临界荷载。
第14章
3、举例 (1)试求图示结构的临界荷载。
p
pcr
EI l x
x
y
pcr
解:建立坐标系、取隔离体、写平衡方程
R
M p y R (l x) (1)
l-x
结构动力学之结构的稳定计算
M p( y ) (1)
将 M EIy 代入式( 1): EIy py p
令 p , EI 则:y 2 y 2 (2)
解为: y A cos x B sin x y A sin x B cos x
结构不能工作。
(a) 偏心受压杆
(b) 荷载——位移曲线(P—Δ 曲线)
结构的稳定计算
稳定验算与强度验算区别
稳定验算 目的 防止出现不稳定的平衡状态 强度验算 保证结构的实际最大应力不超过 相应的强度指标
内容
研究结构同时存在的两种本质 不同的平衡状态的最小荷载值, 求解结构在荷载下的内力问题 即临界荷载
P
C
平衡方程可以简化为:
Pl k 0 P k / l
P cr
cos 1 tan sin
A
随遇平衡
B
即有外界干扰时,结构失稳时的临界荷载为:
O
θ
Pcr k / l
θ可以为任意值,即结构处于随意平衡状态。大小挠度 理论求出的分枝点荷载临界值是相同的,但是失稳后的承载 能力结论是不同的。
稳定方程(特征方程: ) D 1 0 0
l 1 0 0
cos l si n l
R cosαl A sinl B 0 0 p
l cos l sin l 0 tg l l
无限自由度体系的稳定 静力法
tg l l
左式为“超越方程”
5 2
2
0
3 2
EI 2 EI 得 :pcr 4.493 EI 20.19 2 l (0.7l )2
2
4.493
板的稳定计算公式
板的稳定计算公式板的稳定计算公式是结构工程领域中非常重要的内容,它可以帮助工程师们预测和评估板在受力情况下的稳定性。
在实际工程设计中,经常需要对板的稳定性进行计算,以确保结构的安全性和稳定性。
下面我们来详细介绍板的稳定计算公式。
首先,板的稳定性计算通常包括两种情况:一是受压稳定,即板在受压力作用下的稳定性;二是受弯稳定,即板在受弯矩作用下的稳定性。
对于板的受压稳定性计算,常用的计算公式是欧拉公式,即板的稳定性方程为Pcr = π²E(t/kl)²,其中Pcr 为板的临界压力,E为板的弹性模量,t为板的厚度,k为板的有效长度系数,l为板的长度。
在实际工程设计中,为了简化计算,常常采用一些简化的公式来进行板的稳定性计算。
例如,对于矩形板的受压稳定性计算,可以采用Kt系数法,即板的稳定性方程为Pcr = Ktπ²E(t/l)²,其中Kt为板的稳定性系数,一般取为0.95。
对于板的受弯稳定性计算,常用的计算公式是板的受弯稳定性方程为Mcrl =π²E(t/kl)²,其中Mcrl为板的临界弯矩,E为板的弹性模量,t为板的厚度,k为板的有效长度系数,l为板的长度。
在实际工程设计中,为了简化计算,常常采用一些简化的公式来进行板的受弯稳定性计算。
例如,对于矩形板的受弯稳定性计算,可以采用Kb系数法,即板的受弯稳定性方程为Mcrl = Kbπ²E(t/l)²,其中Kb为板的稳定性系数,一般取为0.7。
需要注意的是,板的稳定性计算是一个复杂的工程问题,受到很多因素的影响,如板的材料性质、尺寸、受力情况等,因此在进行板的稳定性计算时,需要综合考虑各种因素,选择合适的计算公式,确保计算的准确性和可靠性。
此外,为了保证结构的安全性,工程设计中通常会对板的稳定性进行安全系数的考虑,以确保板在受力情况下的稳定性和安全性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
D
FP
D k
l
FP
k
l
l
l
l
(1)假设失稳形式,如图所示。位移参数为y1和 y2
FAx = FP A FAx = FP A B y1 B B1y1 y2 C1 y2 C D FP
C C1 FR2= ky2 FR2= ky2
D FP
FP y 2 l Fy P 2 FDy = l
FP y 1 FAy = lF y P 1 FAy = l
Ⅰ(不稳定)
(1)假设失稳形式,如图所示 (2)建立临界状态的平衡方程 EI0 =∞
l
B C1
FPcr = kl
A
C Ⅱ(随遇平衡)
Ⅰ(稳定)
(3)建立稳定方程:
A
( FP l kl 2 ) 0A
方程有两个解,其一为零解,
O
0 0
对应于原始平衡路径I (图中OAB);其二为非零解, 对应于新的平衡路径II (图中AC或AC1)
3FP kl 0
C
D D1 FP k
l
FRC
解稳定方程,得特征荷载值
确定临界荷载为
kl FP 3
FPcr
kl FP 3
三、无限自由度体系的稳定计算(静力法)
用静力法计算无限自由度体系稳定问题有两个特点: FP 第一,位移参数为无穷多个;
y O
FR
x
第二,临界状态平衡方程为微分方程。
3)根据平衡具有二重性静力特征(位移有非零解),建
立特征方程,习惯称稳定方程。
4)解稳定方程,求特征根,即特征荷载值。
5)由最小的特征荷载值,确定临界荷载(结构所能承 受的压力必须小于这个最小特征荷载值,才能维持 其稳定平衡)。
二、静力法计算示例
以图示的一个单自由度体系为例。
FP k B
F
(1)假设失稳形式,如图所示 (2)建立临界状态的平衡方程
关于位移参数为y1和 y2的齐次线性方程组
建立稳定方程:
y1 y2 0
则对应于原始平衡形式,相应于没有丧失稳定的情况
y1 y2
不全为零,则对应于相应新的平衡形式
kl 2 FP D FP
FP 0 kl 2 FP
此方程就是稳定方程。
解稳定方程,求特征荷载值:
(kl 2FP )2 FP2 0
B1 FR1= ky1 FR1= ky1
FDy =
各支座反力分别为别计算如图示
(2)建立临界状态平衡方程:分别取A-B1-C1部分和B1C1-D部分为隔离体,则有
FAx = FP A B y1 B1 FP y 1 FAy = l FR1= ky1 y2 C1 FR2= ky2 FDy = FP y 2 l C D FP
二、静力法计算示例
FP FP FRB B B1
Ⅰ(不稳定)
FP
(1)假设失稳形式,如图所示
B
k
(2)建立临界状态的平衡方程 (3)建立稳定方程:
EI0 =∞ C1
FPcr = kl l
B A C Ⅱ(随遇平衡)
Ⅰ(稳定)
( FP l kl 2 ) 0
A A
为了得到非零解,方程的系数应为零 FPl-kl2=0
l /2 l /2
Ⅰ(不稳定)
不稳定平衡 随遇平衡 稳定平衡
Ⅱ(大挠度理论)
C B A
D FPcr
Ⅰ(稳定)
D1
Ⅱ(小挠度理论)
O
理想体系的失稳形式是分支点失稳。其特征是:丧失稳 定时,结构的内力状态和平衡形式均发生质的变化。因 此,亦称质变失稳(属屈曲问题)。
FPcr FPcr
qcr
FPcr
a) 受静水压力的圆弧拱单纯
用静力法计算图示弹性理想压杆的临界荷载。 (1)假设失稳形式,如图中实线所示。 (2)建立临界状态平衡方程: 按小挠度理论,压杆弹性曲线的 近似微分方程为
l /2
FP
FP
Ⅰ(不稳定)
状态的静力特征是:平衡形
式具有二重性。静力法的要 不稳定平衡 C
随遇平衡 B 点是:在原始平衡路径之外,
Ⅱ(大挠度理论)
D FPcr
Ⅰ(稳定)
寻找新的平衡路径,确定二 者交叉的分支点,从而求出 临界荷载。
l /2
稳定平衡
A
D1
Ⅱ(小挠度理论)
O
静力法计算步骤
1)假设临界状态时体系的新的平衡形式(失稳形式)。 2)根据静力平衡条件,建立临界状态平衡方程。
EI0 =∞
M
弹簧反力
A
0 FP l FRB l 0
A FP k B FRB B FP B1
FRB kl
于是有
EI0 =∞
l
l
C
FPcr = kl
( FP l kl 2 ) 0
A
A
二、静力法计算示例 以图示的一个单自由度体系为例。 FRB k B
B B1 FP FP FP
二、三种平衡状态
无干扰的平衡状态 对轴心受压 件施以干扰 干扰后的平衡状态 恢复原平衡状态
撤除干扰
新位置保持平衡 继续偏离
临界状态:是由稳定平衡向不稳定平衡过渡的中介状态。 使杆件处于临界状态的外力称为临界荷载,以FPcr表示。 它既是使杆件保持稳定平衡的最大荷载,也是使杆件 产生不稳定平衡的最小荷载。
由此解得两个特征荷载值,即
FP1 kl 3
FP 2 kl
确定临界荷载值:取二特征荷载值中最小者,得
FPcr kl 3
【讨论】将以上二特征荷载值分别回代,可求得对应位 移参数的比值。
C1 A B y1 B 1 C y2= y1 D FP1= FPcr= kl 3
a) 反对称失稳(实际失稳形式)
l /2
不稳定平衡 随遇平衡
Ⅱ(大挠度理论)
C B A
D FPcr
Ⅰ(稳定)
l /2
稳定平衡
D1
Ⅱ(小挠度理论)
O
FP FPcr
B点是路径Ⅰ与Ⅱ的分支点(也可理解为共解点)。 该分支点处,二平衡路径同时并存,出现平衡形式 的二重性(其平衡既可以是原始直线形式,也可以 是新的微弯形式)。 原始平衡路径I在该分支点处,由稳定平衡转变为不 FP FP 稳定平衡。 因此,这种形式的失稳 称为分支点失稳,对应 的荷载称为第一类失稳 的临界荷载,对应的状 态称为临界状态。
三、两类稳定问题
失稳:随着荷载的逐渐增大,原始平衡状态丧失其稳定性 第一类失稳:分支点失稳
FP FP
Ⅰ(不稳定)
l /2
Ⅱ(大挠度理论)
不稳定平衡 随遇平衡
C B A
D FPcr
Ⅰ(稳定)
l /2
稳定平衡
D1
Ⅱ(小挠度理论)
O
简支压杆的理想体系的平衡路径
FP FPcr π EI l
2
2
压杆单纯受压,不发生弯曲变形(挠度D=0)。仅 有惟一平衡形式——直线形式的原始平衡状态,是 稳定的,对应原始平衡路径Ⅰ(OAB表示)。
七、 稳定分析的自由度
体系稳定分析的自由度——确定结构失稳时所有的变形状 态所需的独立几何参数(位移参数)的数目,用W表示。
FP FP y1 FP
y2 EI 0 =∞ EI 0 =∞
y(x) EI
a) W=1
b) W=2
c) W=∞
x
13.2 确定临界荷载的静力法
一、 静力法及其计算步骤 静力法,根据临界状态的静力特征而提出的 。 在分支点失稳问题中,临界
A y1 B1
B
C y2= y1 C1
D
FP2=kl
b) 正对称失稳
【例13-2】试用静力法求图所示结构的临界荷载。弹簧刚度 系数为k。
A B EI 0 =∞ C D FP
A
l
B
B
EI 0 =∞ l
C
l
D FP
1 (1)假设失稳形式,如图所示,位移参数为D 。 d l l l A C F P
B B1
三、稳定计算的核心内容
对于单个荷载,要确定临界荷载 FPcr 对于一组荷载或均布荷载,则要确定荷载的临界参数 cr 小挠度理论和大挠度理论 结构稳定问题只有根据大挠度理论才能得出精确的结 论; 小挠度理论可以用比较简单的办法得到能满足工程需 要的基本正确的结论。 该二理论均以变形后的位形为计算依据,所不同的是, 小挠度理论的曲率采用近似表达式,而大挠度理论的 曲率采用精确表达式。
二、三种平衡状态
轴心受压杆件受到轻微干扰而稍微偏离了它原来的直 线平衡位置,当干扰消除后 该杆件能够回到原来的平衡位置,则原来的平衡状态 称为稳定平衡状态。 该杆件继续偏离,不能回到原来的平衡位置,则原来 的平衡状态称为不稳定平衡状态 该杆件在新位置上就地静止并平衡,则原来的平衡状 态称为随遇平衡状态(或中性平衡状态),亦称临界 状态。
D1
FP
FP FP
A
l
B
C FRC D1 FRC
D
k
FP
FP
lБайду номын сангаас
k
建立临界状态平衡方程:
( FP )2l FPd (kd ) l 0 l
建立稳定方程:
A B EI 0 =∞ C
d
M
C
0
(3FP kl )d 0
D FP l
未知量d 有非零解的条件是 l l
B1 FP A B FP
l
l
l
M C1 0 (C 以左部分) M B1 0 ( B 以右部分)
1 1
FP y1 ky1l ( )2l FP y2 0 l FP y2 ky2 l ( )2l FP y1 0 l