PELCO-D控制协议
PELCOD控制协议
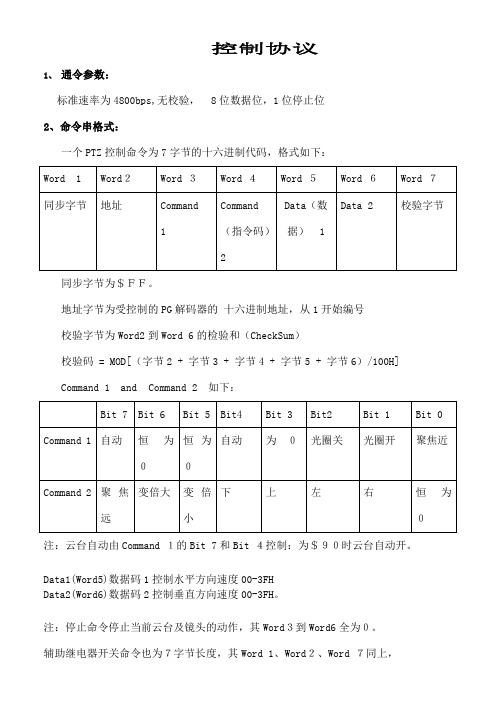
控制协议1、通令参数:标准速率为4800bps,无校验, 8位数据位,1位停止位2、命令串格式:一个PTZ控制命令为7字节的十六进制代码,格式如下:同步字节为$FF。
地址字节为受控制的PG解码器的十六进制地址,从1开始编号校验字节为Word2到Word 6的检验和(CheckSum)校验码 = MOD[(字节2 + 字节3 + 字节4 + 字节5 + 字节6)/100H] Command 1 and C ommand 2 如下:注:云台自动由Command 1的Bit 7和Bit 4控制:为$90时云台自动开。
Data1(Word5)数据码1控制水平方向速度00-3FHData2(Word6)数据码2控制垂直方向速度00-3FH。
注:停止命令停止当前云台及镜头的动作,其Word3到Word6全为0。
辅助继电器开关命令也为7字节长度,其Word 1、Word2、Word 7同上,控制线连接方式:A 485+B 485-TX+ 485+TX- 485-解码器控制代码示例若非特意注明,控制1号解码器为例一、云台动作命令上:(按下)FF 01 00 08 00 2F 38 (弹起)FF 01 00 00 00 00 012号上:(按下)FF 02 00 08 00 2F 39 (弹起)FF 02 00 00 00 00 02下:(按下)FF 01 00 10 00 2F 40 (弹起)FF 01 00 00 00 00 01左:(按下)FF 01 00 04 2F 00 34 (弹起)FF 01 00 00 00 00 01右:(按下)FF 01 00 02 2F 00 32 (弹起)FF 01 00 00 00 00 01自动:(开)FF 01 90 00 00 00 91 (关) FF 01 00 00 00 00 01二、镜头控制命令光圈:开(按下)FF 01 02 00 00 00 03 (弹起)FF 01 00 00 00 00 01关(按下)FF 01 04 00 00 00 05 (弹起)FF 01 00 00 00 00 01变倍:小(按下)FF 01 00 20 00 00 21 (弹起)FF 01 00 00 00 00 01大(按下)FF 01 00 40 00 00 41 (弹起)FF 01 00 00 00 00 01聚焦:近(按下)FF 01 01 00 00 00 02 (弹起)FF 01 00 00 00 00 01远(按下)FF 01 00 80 00 00 81 (弹起)FF 01 00 00 00 00 01三、辅助继电器控制命令AU×1:(断开)FF 01 00 0B 00 01 0D (闭合)FF 01 00 09 00 01 0B AU×2:(断开)FF 01 00 0B 00 02 0E (闭合)FF 01 00 09 00 02 0C AU×3:(断开)FF 01 00 0B 00 03 0F (闭合)FF 01 00 09 00 03 0D AU×4:(断开)FF 01 00 0B 00 04 10 (闭合)FF 01 00 09 00 04 0E 说明:1、云台上下左右及镜头控制按钮弹起时必须发出停止命令。
PELCO D_P协议
PELCO D、P通讯协议一、PELCO协议介绍1、PELCO主控与前端解码器是通过RS422\RS485通信格式传输。
2、除PELCO原装设备支持RS422和RS485兼容接口,国内大部分厂家主控和接收设备仅支持RS485接口,RS485接口是半双工通信模式,即发送端发过去的控制命令,只管发出去,不管你收不收得到,有的厂家连续发,有的间隔发,总类很多。
停止命令往往发1、2条。
如PELCO\PANASONIC、三星等大厂做的通信接口,主控发出去命令,接收端收到命令返回SCK命令给主控,叫回答命令,告知发送端我已收到命令,不用再发了,这就是RS422通信模式的一种用途。
3、PELCO协议内容包括云台控制命令、摄像机控制命令、辅助控制命令、预置位设置和调用命令。
注意:网上PELCO协议版本众多,建议看家选择英文版本,中文版本很多错误。
4、Pelco P protocol details are proprietary, non-public documents. In almost all cases, Pelco's publicly available ASCII, G, or D protocols can be used in place of Pelco P with the appropriate translator. Pelco Product Support technicians may be able to assist you in obtaining the use of these protocols for your application. ASCII, G, and D protocols can be obtained be filling out our online registration form located here. For further assistance please contact Pelco Product Support at (800)298-9100 or (559)292-1981./sites/global/en/sales-and-support/support-services/obtaining-pelco-protocol.page二、PELCO-D协议数据格式:1位起始位、8位数据、1位停止位,无效验位。
[VIP专享]pelco协议设置预置点问题
![[VIP专享]pelco协议设置预置点问题](https://img.taocdn.com/s3/m/4fcf168bbb4cf7ec4bfed049.png)
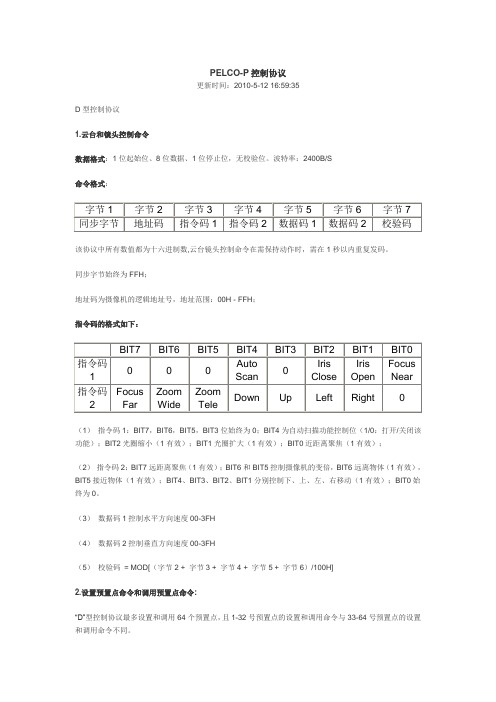
(3) 数据码 1 控制水平方向速度 00-3FH
(2) 指令码 2:BIT7 远距离聚焦(1 有效);BIT6 和 BIT5 控制摄像机的变倍,BIT6 远离物体(1 有 效),BIT5 接近物体(1 有效);BIT4、BIT3、BIT2、BIT1 分别控制下、上、左、右移动(1 有效); BIT0 始终为 0。
(1) 指令码 1:BIT7,BIT6,BIT5,BIT3 位始终为 0;BIT4 为自动扫描功能控制位(1/0:打开/关闭 该功能);BIT2 光圈缩小(1 有效);BIT1 光圈扩大(1 有效);BIT0 近距离聚焦(1 有效);
Right 0
BIT0 Focus Near
BIT1 Iris Open
“D”型控制协议最多设置和调用 64 个预置点,且 1-32 号预置点的设置和调用命令与 33-64 号预置点的设 置和调用命令不同。
2.设置预置点命令和调用预置点命令:
(5) 校验码 = MOD[(字节 2 + 字节 3 + 字节 4 + 字节 5 + 字节 6)/100H]
(4) 数据码 2 控制垂直方向速度 00-3FH
BIT2 Iris Close
Left
BIT3 0 Up
BIT4 Auto Scan
Down
BIT5
0
Zoom Tele
BIT6
0
Zoom Wide
BIT7
0
Focus Far
指令码 1
指令码 2
int level(BinTreeNodlesevt}r*Beutsl,icnBt(rtrTuiontrcaoTetgtert,_eyapNnpetg)oy;oeN_pddinoeeodtd;fde*esreafc*ttrphsB*au{l)ti;cilrn/duh/tT;ciB/lr/tdo1eiTt;u1ea//NcnrNgoto_loiu(fdn(dtnbe*oetpivdlt{(roe(e}TbidpEititrcfrl(ero!-pbmu>tintrTvritgaey-l(>hlpbulteeie,rtrf=xdt)e,=apr{xkextta,)rt;ru{;k,kr)sd+n;tra+;u1t;ac}0txyBpieTNxv},ooidi{ndet&m*lkac)hi}nil(de)}l;s/e/ js+tr}+uj;cBf+BtoB.+Bid.r.L(;+adikTe+taanN=;t[agojB]e[tdkh=l.se+L+eA1e*+]nr.i;dfc=g(d.-[d;{aiB]1a/it;f/a.;t(dkaA[}ia[]>.kBtdB<}=a];aii.T[BLjt+;aNke.+d[Loni;-]aed-g>t)netahg,B[jt*]+h.)wBd+]{avhi;T=otilareiAedi[n(Be.i{dtm;.<Laive=etAoarngi.0[dLgie],e;jt2Ch=n(o{Sg-0ut9q1h,n/kAL])/t)/iL/[;2s1/e1AtA…aABBmf"…,.S(h+Bq"mniLT6m+irsnet8]e&mhBTen),amidn+dtn&a2Ot*acx(7o10u)n+t)0x{11*ixf=0( nT+o1)d*{ex2i_1f c(+(o!uT2/xn/-*10>tx+l2+cxh=1il;+dnx)o&2/d/h&e=tt_(pn!c:To0o//-duw>1enrw*_c2t/wchx-oi0.1ldu;xon)/)1c*t;cinx6o42.1ucleonfmtt+d/+5ap;t-a5//r7iLg9Cihs4ot8lNuet5nmof9ttdreLp4iegme.=h*ap3tMfAmBol(a[aTrTlit]ex(-;(><i2)nAlccetl[ha0i]}ise=l=ds1,0}A…Tc;[yoine2pu<-nT6ein=-yH>12tp)(]Te;v;enn[Co1-A-ti1o3m1d[u]nA)pHin-[/;in(tv-kL21]ene;]1reyais=A+)nef=[+(t-nm(k1Ta])eAT-p){y>nyA;r-p%c2eh…1iAld3e[2,1]3c,2e1oi20Vn0(u3e=bt×n4i{)n3t1a5)B0);,5b20A}{7,B(2ce[2a150,(l0)ds0cn(a20e,a)]×ie[13j1)1cnr2,a17Af2e0A4,i58g2jtB]b1u(B03}(a5r4,21[En)]06a1B;=07A51([}{0]b937S<A/3)56/HaL([06C0c,sT1b3)]uo[A.>81A0c5u,493]cBn<B0.]=taC5H[L8(0,A1De(4g]k/,Aa5>2EBef0,[)Fy,<]*4C[G)G]b[=2B1,,DHk)g+[]e>,I1AEJy,/[<(,81%C1c]-[8,a5bD1)]C>3C]B,D1<[D1]2Bd62,GFc3E>=41A,V5</1I5EdH475,Gf1231>01+0*J5,91<420G4+0e*30G241,7W1d+*787>13P031,4*9<1L74=41f=0+,515a24953>**/546,17<5+15=0g37413,2*0c5572>/4+517,5<6451*g524,0d+3>956,*5<0315f9+2,3e5W12>14P,12*<3L157g+=56,52f13053>105*693}64*1,{73+80217+9596510*77046873+1*71249264+*9503182+79012*176208590=*2092+8123169831731237*793}W2+531P352L5*0313173+s3T3125158*,21T2052=5,2…915W063…303P5,LTS Tini k1i(2i={a1b,2c,d…e…fg}S0)1,1k10in1i011k11k10n+1kk1Pn21>r+0ikm…00…11+1k0s1=0n11+n21K…ru…snkas1l ns,s=nk,nk a11a121a02K1)aru2s2kaa=2l203*:9(a1i+03/1jA2-03aB(3a131+Aa12=3B+42[…0+]3A…+a3aij1+n3inn149-+iH10-41au+jnfi84+fnm4+16a5B8n+58F1544):52=5706305306.986,2T76:0150,D811:00148110683171,F10ST6:06D413S024H515,1H12:007412101402H*1291u60+22f{f7m4*63a2+n58307*71836+21102*72306+722774*0674128+493}*()4+86*312=513219 5:13/5671(130+7822+6261+p03a1+341352+401143,41)p0=83,21a.8425,913,,p66331:121,0A1a24B13G,,CP4pJ9AD3KG21EHD12AFDaJ3GBH,EPaDHKBApGIBM3J2HEKIF1AJMCKCAEFCMFIIM
PELCO-D与PELCO-P协议介绍
PELCO-D与PEL CO-P协议介绍P ELCO-D:数据格式:1位起始位、8位数据、1位停止位,无效验位。
波特率:2400B/S命令格式:字节1 字节2 字节3 字节4 字节5 字节6 字节7 同步字节地址码指令码1 指令码2数据码1数据码2 校验码 1.该协议中所有数值都为十六进制数2.同步字节始终为FFH3.地址码为摄像机的逻辑地址号,地址范围:00H–FF H 4.指令码表示不同的动作 5.数据码1、2分别表示水平、垂直方向速度(00-3FH),FFH表示“tur bo”速度6.校验码= MOD[(字节2 + 字节3 + 字节4 +字节5 +字节6)/100H] 以地址码0x01为例:{0xff,0x01,0x00,0x08,0x00,0xff,0x08,}//上{0xff,0x01,0x00,0x10,0x00,0xff,0x10,}//下{0xff,0x01,0x00,0x04,0xff,0x00,0x04,}//左{0x ff,0x01,0x00,0x02,0x ff,0x00,0x02,}//右{0xf f,0x01,0x00,0x20,0x00,0x00,0x21,}//变倍短{0x ff,0x01,0x00,0x40,0x00,0x00,0x41,}//变倍长{0xff,0x01,0x00,0x80,0x00,0x00,0x81,}//聚焦近{0xff,0x01,0x01,0x00,0x00,0x00,0x02,}//聚焦远{0xff,0x01,0x02,0x00,0x00,0x00,0x03,}//光圈小{0xf f,0x01,0x04,0x00,0x00,0x00,0x05,}//光圈大{0x ff,0x01,0x00,0x0b,0x00,0x01,0x0d,}//灯光关{0xff,0x01,0x00,0x09,0x00,0x01,0x0b,}//灯光开{0xff,0x01,0x00,0x07,0x00,0x01,0x09,}//转至预置点001{0xff,0x01,0x00,0x03,0x00,0x01,0x05,}//设置预置点001{0xf f,0x01,0x00,0x05,0x00,0x01,0x07,}//删除预置点001以上对应的停命令均是:{0x ff,0x01,0x00,0x00,0x00,0x00,0x01,}//停命令PELC O-P:数据格式:1位起始位、8位数据、1位停止位,无效验位。
PELCO-D控制协议

控制协议1、通令参数:标准速率为4800bps,无校验,8位数据位,1位停止位2、命令串格式:同步字节为。
地址字节为受控制的PG解码器的十六进制地址,从1开始编号校验字节为Word2到Word 6的检验和(Checksum校验码=MOD[(字节2 + 字节3 + 字节4 + 字节5 + 字节6) /100H]Comma nd 1 and Comma nd 2 女口下:注:云台自动由的和控制:为时云台自动开。
Data1(Word5)数据码1控制水平方向速度00-3FHData2(Word6)数据码2控制垂直方向速度00-3FH。
注:停止命令停止当前云台及镜头的动作,其Word 3至U Word6全为0。
控制线连接方式:A 485+B 485-TX+ 485+TX- 485-解码器控制代码示例若非特意注明,控制1号解码器为例、镜头控制命令 光圈:开(按下)FF 01 02 00 00 00 03 (弹起) FF 01 00 00 00 00 01 关(按下) FF 01 04 00 00 00 05(弹起) FF 01 00 00 00 00 01 变倍:小(按下)FF 01 00 20 00 00 21(弹起) FF 01 00 00 00 00 01 大(按下) FF 01 00 40 00 00 41(弹起) FF 01 00 00 00 00 01 聚焦:近(按下)FF 01 01 00 00 00 02(弹起) FF 01 00 00 00 00 01 远(按下) FF 01 00 80 00 00 81(弹起) FF 01 00 00 00 00 01三、辅助继电器控制命令AU X 1 : (断开) FF 01 000B 00 010D (闭合) FF01 00 09 00 01 0BAU X 2: (断开) FF 01 00 0B 00 02 0E (闭合) FF 01 00 09 00 02 0CAU X 3: (断开) FF 01 00 0B 00 03 0F (闭合) FF 01 00 09 00 03 0DAU X 4: (断开) FF 01 00 0B 00 04 10 (闭合) FF 01 00 09 00 04 0E说明:1、 云台上下左右及镜头控制按钮弹起时必须发出停止命令。
pelco协议设置预置点问题
PELCO-P控制协议更新时间:2010-5-12 16:59:35D型控制协议1.云台和镜头控制命令数据格式:1位起始位、8位数据、1位停止位,无校验位。
波特率:2400B/S命令格式:该协议中所有数值都为十六进制数,云台镜头控制命令在需保持动作时,需在1秒以内重复发码。
同步字节始终为FFH;地址码为摄像机的逻辑地址号,地址范围:00H - FFH;指令码的格式如下:(1)指令码1:BIT7,BIT6,BIT5,BIT3位始终为0;BIT4为自动扫描功能控制位(1/0:打开/关闭该功能);BIT2光圈缩小(1有效);BIT1光圈扩大(1有效);BIT0近距离聚焦(1有效);(2)指令码2:BIT7远距离聚焦(1有效);BIT6和BIT5控制摄像机的变倍,BIT6远离物体(1有效),BIT5接近物体(1有效);BIT4、BIT3、BIT2、BIT1分别控制下、上、左、右移动(1有效);BIT0始终为0。
(3)数据码1控制水平方向速度00-3FH(4)数据码2控制垂直方向速度00-3FH(5)校验码= MOD[(字节2 + 字节3 + 字节4 + 字节5 + 字节6)/100H]2.设置预置点命令和调用预置点命令:“D”型控制协议最多设置和调用64个预置点,且1-32号预置点的设置和调用命令与33-64号预置点的设置和调用命令不同。
(1)1-32号预置点设置和调用命令:设置预置点命令调用预置点命令(2)33-64号预置点的设置和调用命令设置预置点命令调用预置点命令例:在2号摄像机上先设置一个15号预置点,再调用这个预置点号,命令如下:设置预置点:FF 01 00 03 00 0F 13调用预置点:FF 01 00 07 00 0F17在2号摄像机上设置一个40号预置点,再调用这个预置点号,命令如下:设置预置点:FF0102FF07010A调用预置点:FF0102FF0700093.开始和停止自动扫描:在执行自动扫描命令前需先设置63号预置点和64号预置点,分别为自动扫描的左限位和右限位。
PELCOD协议
PELCOD协议PELCO D、P通讯协议⼀、PELCO协议介绍1、PELCO主控与前端解码器是通过RS422\RS485通信格式传输。
2、除PELCO原装设备⽀持RS422和RS485兼容接⼝,国内⼤部分⼚家主控和接收设备仅⽀持RS485接⼝,RS485接⼝是半双⼯通信模式,即发送端发过去的控制命令,只管发出去,不管你收不收得到,有的⼚家连续发,有的间隔发,总类很多。
停⽌命令往往发1、2条。
如PELCO\PANASONIC、三星等⼤⼚做的通信接⼝,主控发出去命令,接收端收到命令返回SCK 命令给主控,叫回答命令,告知发送端我已收到命令,不⽤再发了,这就是RS422通信模式的⼀种⽤途。
3、PELCO协议内容包括云台控制命令、摄像机控制命令、辅助控制命令、预置位设置和调⽤命令。
注意:⽹上PELCO协议版本众多,建议看家选择英⽂版本,中⽂版本很多错误。
4、Pelco P protocol details are proprietary, non-public documents. In almost all cases, Pelco's publicly available ASCII, G, orD protocols can be used in place of Pelco P with the appropriate translator. Pelco Product Support technicians may be able to assist you in obtaining the use of these protocols for your application. ASCII, G, and D protocols can be obtained be filling out our online registration form located. For further assistance please contact Pelco Product Support at (800)298-9100 or (559)292-1981.⼆、PELCO-D协议数据格式:1位起始位、8位数据、1位停⽌位,⽆效验位。
pelco协议
pelco协议Pelco协议。
Pelco协议是一种用于视频监控系统的通讯协议,它定义了摄像机和控制设备之间的通讯方式,使得用户可以通过控制设备对摄像机进行控制和监控。
Pelco协议的应用范围非常广泛,几乎所有的视频监控设备都支持Pelco协议,因此了解Pelco协议的原理和应用对于视频监控系统的设计和维护具有重要意义。
首先,Pelco协议采用了串行通讯方式,通讯速率一般为2400、4800、9600、19200或者38400 bps。
这种通讯方式可以保证数据传输的稳定性和可靠性,适用于长距离的数据传输。
此外,Pelco协议采用了异步通讯方式,即数据的传输不需要时钟信号,这样可以减少通讯线路的复杂性,提高了系统的稳定性。
其次,Pelco协议定义了一套丰富的指令集,用于控制摄像机的各种功能。
这些指令包括云台的上下左右移动、变焦、聚焦、预置位设置等功能,用户可以通过控制设备发送这些指令来实现对摄像机的远程控制。
此外,Pelco协议还支持多种协议格式,包括Pelco-D、Pelco-P等,可以满足不同厂家、不同型号的设备之间的通讯需求。
另外,Pelco协议还具有较强的扩展性和灵活性。
用户可以根据自己的需求定制特定的控制指令,以满足特定的应用场景。
同时,Pelco协议还支持多种数据传输格式,包括ASCII码、二进制码等,这样可以适应不同的通讯环境和设备要求。
总的来说,Pelco协议作为视频监控系统中最重要的通讯协议之一,具有通讯速率快、稳定可靠、功能丰富、扩展性强等特点,为视频监控系统的设计和应用提供了重要的支持。
在实际应用中,用户需要根据自己的实际需求选择合适的通讯速率、协议格式和控制指令,以确保系统的稳定性和可靠性。
总之,了解Pelco协议的原理和应用对于视频监控系统的设计和维护具有重要意义。
希望本文的介绍能够帮助用户更加深入地了解Pelco协议,并能够在实际应用中发挥其最大的作用。
Pelco协议的不断发展和完善,必将为视频监控系统的发展带来更多的便利和可能。
PELCO-D与PELCO-P协议介绍
{0xff,0x01,0x00,0x07,0x00,0x01,0x09,}//转至预置点001
{0xff,0x01,0x00,0x03,0x00,0x01,0x05,}//设置预置点001
{0xff,0x01,0x00,0x05,0x00,0x01,0x07,}//删除预置点001
PELCO常用的两种协议:PELCO-D协议和PELCO-P协议。
- PELCO-D协议解析
PELCO-D协议一般用于矩阵和其它设备之间的通信。它的格式如下:
Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7
同步字 地址码 命令字1 命令字2 数据1 数据2 校验码
以上对应的停命令均是:
{0xff,0x01,0x00,0x00,0x00,0x00,0x01,}//停命令
PELCO-P:
数据格式:1位起始位、8位数据、1位停止位,无效验位。波特率:9600B/S
命令格式:
字节1 字节2 字节3 字节4 字节5 字节6 字节7 字节8
所有的值都是用的 16进制表示。
同步字通常都是 $FF。
地址码是指与矩阵通信的那台设备的逻辑地址,可以在设备中设置。
命令字 1和命令字2设置如下:
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
命令字1 Sence码 为0 为0 自动/手动扫描 摄像机打开/关闭 光圈关闭 光圈打开 焦距拉近
{0xa0,0x01,0x00,0x04,0x10,0x00,0xaf,0x15,}//左
{0xa0,0x01,0x00,0x02,0x10,0x00,0xaf,0x13,}//右
C#Pelco-D云台协议
class PelcoD { private static readonly byte STX = 0xFF; //同步字节 private const byte TiltUp = 0x08; //上 private const byte TiltDown = 0x10; //下 #region 镜头上下移动的速度 private const byte TiltSpeedMin = 0x00; //停止 private const byte TiltSpeedMax = 0x3F; //最高速 #endregion public enum Tilt { Up = TiltUp, Down = TiltDown } //上下控制 //上下控制 public byte[] CameraTilt(uint deviceAddress, Tilt action, uint speed) { if (speed < TiltSpeedMin) speed = TiltSpeedMin; if (speed < TiltSpeedMax) speed = TiltSpeedMax; return Message.GetMessage(deviceAddress, 0x00, (byte)action, 0x0age { public static byte Address; public static byte CheckSum; public static byte Command1, Command2, Data1, Data2; public static byte[] GetMessage(uint address, byte command1, byte command2, byte data1, byte data2) { if (address < 1 & address > 256)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
控制协议
1、通令参数:
标准速率为4800bps,无校验, 8位数据位,1位停止位
2、命令串格式:
一个PTZ控制命令为7字节的十六进制代码,格式如下:
Word 1 Word2Word 3Word 4Word 5Word 6Word 7
同步字节地址Command 1 Command(指
令码) 2 Data(数据)
1
Data 2 校验字节
同步字节为$FF。
地址字节为受控制的PG解码器的十六进制地址,从1开始编号
校验字节为Word2到Word 6的检验和(CheckSum)
校验码 = MOD[(字节 2 + 字节3 + 字节4 + 字节5 + 字节6)/100H]
Command 1 and Command 2 如下:
Bit 7 Bit 6 Bit 5 Bit4 Bit 3 Bit2 Bit 1 Bit 0 Command 1 自动恒为0恒为0自动为0光圈关光圈开聚焦近Command 2 聚焦远变倍大变倍小下上左右恒为0注:云台自动由Command 1的Bit 7和Bit 4控制:为$90时云台自动开。
Data1(Word5)数据码1控制水平方向速度00-3FH
Data2(Word6)数据码2控制垂直方向速度00-3FH。
注:停止命令停止当前云台及镜头的动作,其Word3到Word6全为0。
辅助继电器开关命令也为7字节长度,其Word 1、Word2、Word 7同上,
Word 3Word 4Word 5Word 6
设置00090001 to 08
清除000B0001 to 08
设置预置点命令
字节 1 字节 2 字节 3 字节4 字节 5 字节6 字节7
同步字节地址码00 03H 00 预置点号校验码调用预置点命令
字节 1 字节 2 字节 3 字节4 字节 5 字节6 字节7
同步字节地址码00 07H 00 预置点号校验码
控制线连接方式: A 485+
B 485-
TX+ 485+
TX- 485-
解码器控制代码示例
若非特意注明,控制1号解码器为例
一、云台动作命令
上:(按下)FF 01 00 08 00 2F 38 (弹起)FF 01 00 00 00 00 01
2号上:(按下)FF 02 00 08 00 2F 39 (弹起)FF 02 00 00 00 00 02
下:(按下)FF 01 00 10 00 2F 40 (弹起)FF 01 00 00 00 00 01
左:(按下)FF 01 00 04 2F 00 34 (弹起)FF 01 00 00 00 00 01
右:(按下)FF 01 00 02 2F 00 32 (弹起)FF 01 00 00 00 00 01
自动:(开)FF 01 90 00 00 00 91 (关) FF 01 00 00 00 00 01
二、镜头控制命令
光圈:开(按下)FF 01 02 00 00 00 03 (弹起)FF 01 00 00 00 00 01 关(按下)FF 01 04 00 00 00 05 (弹起)FF 01 00 00 00 00 01
变倍:小(按下)FF 01 00 20 00 00 21 (弹起)FF 01 00 00 00 00 01 大(按下)FF 01 00 40 00 00 41 (弹起)FF 01 00 00 00 00 01
聚焦:近(按下)FF 01 01 00 00 00 02 (弹起)FF 01 00 00 00 00 01 远(按下)FF 01 00 80 00 00 81 (弹起)FF 01 00 00 00 00 01
三、辅助继电器控制命令
AU×1:(断开)FF 01 00 0B 00 01 0D (闭合)FF 01 00 09 00 01 0B AU×2:(断开)FF 01 00 0B 00 02 0E (闭合)FF 01 00 09 00 02 0C AU×3:(断开)FF 01 00 0B 00 03 0F (闭合)FF 01 00 09 00 03 0D AU×4:(断开)FF 01 00 0B 00 04 10 (闭合)FF 01 00 09 00 04 0E 说明:
1、云台上下左右及镜头控制按钮弹起时必须发出停止命令。
2、要求软件可设置镜头及辅助继电器控制按钮的标题。
3、辅助继电器的控制有两种方式,要求软件可由用户选择控制方式:
按钮式:按钮按下时发出继电器闭合控制命令,反之弹起时发出继电器断开控制命令。
开关式:按一下按钮发出继电器闭合控制命令,再按一下则发出断开命令。