几种云台控制协议
云台控制协议一览表
主机云台控制协议一览表1、RV800 科立解码器通讯协议2、TOTA120 TOTA解码器通讯协议3、S1601 三乐协议4、CLT-168 保千里的协议5、TD-500 保千里高速球通讯协议6、V1200 银信V1200解码器、银信矩阵通讯协议7、ZION 锡安数码CBR24008、ANT 中晖协议9、CBC 日本CBC高速球通讯协议10、CS850A 松下CS850A高速球通讯协议11、CONCORD 2000b、维多B01及美国concord智能快球通讯协议12、HD600 CCVE闭路监控系统通讯协议13、SAMSUNG 三星641-643高速球通讯协议14、YAAN 亚安高速球控制协议15、PIH 利凌PIH717解码器通讯协议16、MG-CS160 明景B01通讯协议17、WISDOM WISDOM解码器通讯协议18、PELCOD1 派尔高公司D通讯协议(四种)19、PELCOD220、PELCOD321、PELCOD422、PELCOP1 派尔高公司P通讯协议(三种)23、PELCOP224、PELCOP325、philips 飞利浦高速球通讯协议(需要485-曼码转换器)26、NEOCOM 耐康姆协议27、名称未定新增加振华重大协议协议预制、是否支持是否有协议预制、是否支持是否有调用高速球自动功能调用高速球自动功能Philips 有支持没有CONCORD 有不支持有PELCOP3 有不支持有CS850A 有支持有PELCOP2 有不支持有CBC 有支持有PELCOP1 无不支持有ANT 无不支持有PELCOD4 有不支持有ZOIN 有不支持有PELCOD3 有不支持有V1200 有不支持有PELCOD2 有不支持有TD-500 有不支持有PELCOD1 无不支持有CLT-168 无不支持有WISDOM 无不支持有S1601MG-CS160 有支持有TOTA120 无不支持有PIH 有不支持有RV800 无不支持有YAAN 有支持有NEOCAM 无不支持有SAMSUNG 有支持有ZHZD 无不支持有HD600 有不支持有云台协议信息请注意: PELCO协议的自动码很有可能不同,基本上一个厂家一个定义,所以有自动功能并不能说明自动能控制,只有和我们协议相符合才能控制.云台控制原理DVR通过与解码器(或球机)的通讯控制云台DVR--------à解码器/球机————―――>摄像头DVR通过485信号向解码器球机发送命令,解码器/球机通过各种方式控制摄像头协议是DVR与解码器通讯的协议,DVR为发送命令方,解码器、球机接收,双方的协议相同才能控制.常见问题1如出现继电器响但是聚焦不成功等问题问题出在解码器(或球机)与摄像头的控制,请客户与解码器(或球机)的厂商联系.2如果协议对上但是继电器不响,可以变换地址码(加1或减1)进行控制.3如果方向可以控制,但是不能控制预制调用或自动,如果继电器没有响,那么就是我们的协议不同,不支持客户的解码器.。
云台地址码、波特率、协议码

云台地址码、波特率、协议拨码设置说明。
恒速球地址、协议、波特率等设置恒速球内置解码板,通过解码板对地址、协议、波特率的设置,实现对恒速球的云台和摄像机的镜头控制。
1、地址设置8位拨码开关(见下图)的1-6位用于恒速球的地址码设置,可在1~63范围内进行地址编码,每个恒速球的地址码应与硬盘录像机或矩阵或控制键盘的地址码一致,才能实现控制。
用于设置地址码6位拨码开关采用2进制,每位拨至ON时值为1,拨至OFF时值为0,详见表2。
表2:地址编码与拨码开关对应表KODICOM卡硬盘录像机KRE-301协议,上海诚丰硬盘录像机PRLCO-D,RM110协议地址采用16进制,与其它地址采用十进制不同,故地址首先需转换为十进制,拔码开关如表3表3:16进制地址与拨码开关对应表请按自己定义好的恒速球地址,按照表2或表3完成拨码开关的设置。
2、波特率设置8位拨码开关(见上图)的7、8位用于恒速球的地址码设置,可设置的波特率为1200BPS、2400BPS、480 0BPS、9600BPS。
每位拨至ON时值为1,拨至OFF时值为0,波特率与拨码开关对应见表4。
表4:波特率与拨码开关对应表请根据控制恒速球设备所采用的通信波特率按照表4完成拨码开关的设置。
3、协议设置6位拨码开关的1,2,3,4位(见上图)用于设置协议类型,内置解码板提供下表5所列的协议,也可按用户要求将其它写入其它的协议。
表5:拨码开关与协议对应表本解码器通常提供以上14种协议,但可根据用户需要提供更多协议。
可提供协议有:与矩阵通讯协议: SAMSUNG、AD、AB、达拉斯、红苹果、科力矩阵、天大天财矩阵、派尔高矩阵、银信矩阵、LP矩阵。
与硬盘录像机通讯协议:录林王嵌入式、凯创嵌入式、DM嵌入式、海康威视嵌入式、KCL(三洋)、YAAN、SAMSUNG、 KIDICOM-SX硬盘录像机使用协议与波特率参照表见表6。
与键盘通讯协议:维多键盘、PWT键盘、三星键盘、YAAN 。
RS485云台控制学习文档
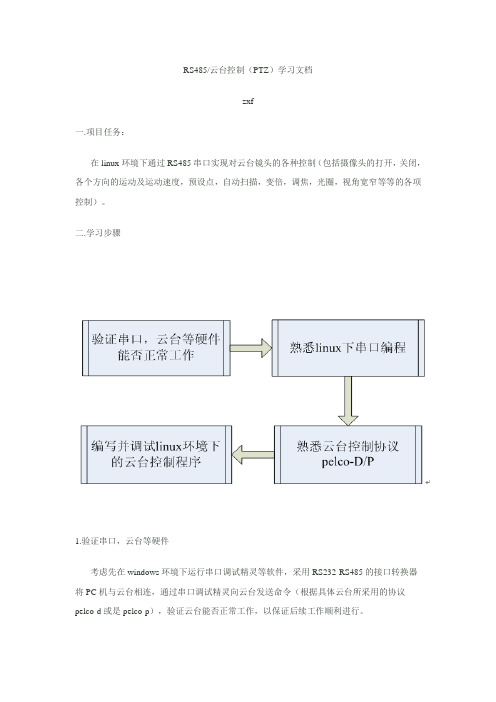
RS485/云台控制(PTZ)学习文档zxf一.项目任务:在linux环境下通过RS485串口实现对云台镜头的各种控制(包括摄像头的打开,关闭,各个方向的运动及运动速度,预设点,自动扫描,变倍,调焦,光圈,视角宽窄等等的各项控制)。
二.学习步骤1.验证串口,云台等硬件考虑先在windows环境下运行串口调试精灵等软件,采用RS232-RS485的接口转换器将PC机与云台相连,通过串口调试精灵向云台发送命令(根据具体云台所采用的协议pelco-d或是pelco-p),验证云台能否正常工作,以保证后续工作顺利进行。
2.熟悉linux下的串口编程串口是电脑上一种很通用设备通信的协议,常用PC机上包含的是RS232规格的串口,当然,除了RS232 ,还有RS485和RS422两种规格,用于不同的设备通信;linux环境下万物皆文件,都是文档,串口是设备文档,配置好后,其他东西就当成文档进行操作。
串口编程中比较重要的是串口的设置,需要配置的部分包括波特率,数据位,停止位,奇偶校验等。
关于linux下串口设置的例子和程序网上有很多,而且基本上内容大同小异。
可以采用如下方法来验证自己在linux下的串口程序:准备PC机两台(一台装Linux系统,另一台装windows即可),用串口线分别和两台计算机的串口相连,在windows机下运行串口调试软件,并打开com1(linux下对应串口ttyS0)等待操作。
在linux机下运行自己的串口程序,注意打开的串口和波特率,校验位等设置要和windows机一致,可以将自己的串口程序运行在接收数据状态,并打印信息,在windows机下用串口调试精灵发送数据,验证在linux机下接受是否正确,同样可以验证发送数据是否正确。
关于串口设置程序:1. 配置波特率:注意每台机器都有输出输入接收信息的速度,所以用cfsetispeed和cfsetospeed来分别设置。
Linux串口设置过程中有一个非常重要的结构体struct termios ,它包括了串口端的任何配置,在termios.h中被定义。
PELCO协议
PELCO协议一、协议介绍PELCO协议是一种用于视频监控系统的通信协议,旨在实现视频设备之间的互操作性和数据传输。
本协议定义了一套通信规则和命令格式,以确保不同厂商生产的视频设备可以相互通信和控制。
二、协议版本当前的PELCO协议版本为2.0,该版本是在之前版本的基础上进行了改进和优化。
本协议适用于支持串口通信的视频设备,如摄像机、云台和录像机等。
三、协议功能1. 云台控制:PELCO协议支持对云台进行控制,包括云台的方向控制(上、下、左、右)、变焦控制、聚焦控制和光圈控制等。
2. 预置位设置:用户可以通过PELCO协议设置云台的预置位,以便在需要时快速定位到指定位置。
3. 巡航路径设置:PELCO协议支持设置云台的巡航路径,可以按照预设的路径自动巡航。
4. 视频参数设置:用户可以通过PELCO协议设置视频设备的参数,如亮度、对比度、色彩等。
5. 报警触发:PELCO协议支持通过报警输入触发相应的动作,如自动转向某个预置位、自动录像等。
6. 视频数据传输:PELCO协议定义了视频数据传输的格式和方式,以保证视频设备之间的数据传输的稳定和可靠。
四、协议结构PELCO协议的命令格式如下:起始码 | 地址码 | 命令码 | 数据1 | 数据2 | 校验和1. 起始码:协议起始码是一个字节的固定值,用于标识一条协议的开始。
2. 地址码:地址码用于指定要控制的设备地址,通常是一个字节的值。
3. 命令码:命令码用于指定要执行的具体操作,如云台控制、参数设置等。
4. 数据1和数据2:数据1和数据2用于传递具体的参数或者数据,根据命令码的不同而有所变化。
5. 校验和:校验和用于校验协议的完整性,通常是通过对其他字段进行求和或异或运算得到的。
五、协议命令PELCO协议定义了一系列的命令码,用于执行不同的操作。
以下是一些常用的命令码示例:1. 云台控制命令:- 上:0x08- 下:0x10- 左:0x04- 右:0x02- 停止:0x002. 变焦控制命令:- 变焦放大:0x20- 变焦缩小:0x40- 停止:0x003. 预置位设置命令:- 设置预置位:0x03- 转到预置位:0x074. 巡航路径设置命令:- 设置巡航路径:0x06- 开始巡航:0x07- 停止巡航:0x005. 视频参数设置命令:- 设置亮度:0x0A- 设置对比度:0x0B- 设置色彩:0x0C六、协议应用PELCO协议广泛应用于视频监控系统中,为不同厂商的视频设备提供了一种标准的通信方式。
云台通讯协议
竭诚为您提供优质文档/双击可除云台通讯协议篇一:几种云台控制协议pelco产品协议解析pelco(派尔高)的监控器材在我国有很广泛的应用。
pelco有自己的传输控制协议,当它的产品配套使用时,可以互相兼容。
但在某些情况下,由于工程的需要,要求用其它设备(比如电脑)来控制pelco的矩阵或镜头,这就要求充分了解pelco的传输协议。
诶诺基数码科技有限公司的视频解码软件可完全兼容pelco协议,可通过pc机控制pelco的各种设备。
本文为你详细解析pelco常用协议之一:pelco-d协议pelco-d协议pelco-d协议一般用于矩阵和其它设备之间的通信。
它的格式如下:所有的值都是用的16进制表示。
同步字通常都是$FF。
地址码是指与矩阵通信的那台设备的逻辑地址,可以在设备中设置。
命令字1和命令字2设置如下:sence码与bit4和bit3有关。
在bit4和bit3为1的情况下,如果sence码为1,则命令就是自动扫描和和摄像机打开;如果sence码为0,则命令就是手动扫描和摄像机关闭。
当然如果bit4或bit3为0的话那命令就无效了。
数据1表示镜头左右平移的速度,数值从$00(停止)到$3F(高速),另外还有一个值是$FF,表示最高速。
数据2表示镜头上下移动的速度,数值从$00(停止)到$3F(最高速)。
校验码是指byte2到byte6这5个数的和(若超过255则除以256然后取余数)。
pelco-d&pelco-p协议格式高速球的设置主要包括协议的选择和消息的发送。
高速球的型号是:tmd-scs18dn使用的协议有:bo1,alec,pelco -9600,pelco-4800,pelco-2400,ao1,santach1650,peaRmain,kony19.2kbkony20.832,hd600,lil in,kalatel,Vcl,tota,wj-Fs616,philips,ad.厂家设置的是pelco-2400.该协议的具体内容如下:pelco-d协议一般用于矩阵和其它设备之间的通信。
Pelco-P协议

PELCO-P云台控制通信协议数据格式:1位起始位、8位数据、1位停止位,无效验位。
波特率:9600B/S 命令格式:字节1 字节2 字节3 字节4 字节5 字节6 字节7 字节8 STX 地址码指令码1 指令码2 数据码1 数据码2 ETX 校验码1.该协议中所有数值都为十六进制数2.STX始终为A0H3.地址码为摄像机的逻辑地址号,地址范围:00H–1FH4.指令码表示不同的动作5.数据码1、2分别表示水平、垂直方向速度(00-3FH),在有关预制点的操作时,数据码2表示预制点值6.ETX始终为AFH7.校验码(XOR Bytes 2-6) = 字节2 ^ 字节3 ^ 字节4 ^ 字节5 ^ 字节6以地址码0x01为例:{0xa0,0x01,0x00,0x02,0x10,0x00,0xaf,0x13,}//右{0xa0,0x01,0x00,0x04,0x10,0x00,0xaf,0x15,}//左{0xa0,0x01,0x00,0x08,0x00,0x30,0xaf,0x39,}//上{0xa0,0x01,0x00,0x10,0x00,0x30,0xaf,0x21,}//下{0xa0,0x01,0x00,0x20,0x00,0x00,0xaf,0x21,}//变倍长{0xa0,0x01,0x00,0x40,0x00,0x00,0xaf,0x41,}//变倍短{0xa0,0x01,0x01,0x00,0x00,0x00,0xaf,0x00,}//聚焦远{0xa0,0x01,0x02,0x00,0x00,0x00,0xaf,0x03,}//聚焦近{0xa0,0x01,0x04,0x00,0x00,0x00,0xaf,0x05,}//光圈大{0xa0,0x01,0x08,0x00,0x00,0x00,0xaf,0x09,}//光圈小{0xa0,0x01,0x00,0x96,0x00,0x00,0xaf,0x97,}//自动巡航{0xa0,0x01,0x00,0x98,0x00,0x00,0xaf,0x99,}//关闭自动巡航{0xa0,0x01,0x00,0x03,0x00,0x01,0xaf,0x03,}//设置预置点01{0xa0,0x01,0x00,0x05,0x00,0x01,0xaf,0x05,}//删除预置点01{0xa0,0x01,0x00,0x07,0x00,0x01,0xaf,0x07,}//转至预置点01{0xa0,0x01,0x00,0x92,0x00,0x00,0xaf,0x93,}//灯光开{0xa0,0x01,0x00,0x94,0x00,0x00,0xaf,0x95,}//灯光关{0xa0,0x01,0x00,0x9A,0x00,0x00,0xaf,0x9b,}//报警开{0xa0,0x01,0x00,0x9C,0x00,0x00,0xaf,0x9d,}//报警关以上对应的停命令均是(上下左右、变倍、聚焦、光圈均有停命令):{0xa0,0x01,0x00,0x00,0x00,0x00,0xaf,0x01,}注:pelco-p缺省地址码是0。
高杆云台枪机485控制协议
高杆云台枪机485控制协议一、485控制协议简介485控制协议是1984年由RS-485组织(RS-485 Organization)制定的一种应用在计算机网络上异步通信介质上的一种泳行协议,集中控制,广播消息,以及点对点通信,其结构由RS-485口所支持。
RS-485口是一种基于驱动器/接收器的单接口,可以支持多种不同的版本的协议,包括RS-485,RS-422,等。
它采用一种非常类似于RS-232口的信号传输方式,但是基于串行通信,一种低速通信协议,所以可以接收与传递更多的信息,并可以多距离传输。
它也支持数据多路复用,即在一条总线上可以存在几个用户,每个用户之间的事务可以彼此隔离。
二、485控制协议主要特点1.支持数据多路复用,就是在一条总线上可以存在几个用户,每个用户之间的数据事务可以彼此隔离,多路距离可用于建立点到点连接,可以满足多距离,多节点的应用需求。
2.具备灵活可靠性:485控制协议支持点对点连接,可靠性和安全性更高,基于冗余备份系统可以改善网络可用性。
3.支持多种通信协议:485控制协议支持多种版本的协议,例如RS-485,RS-422,等都可以在RS-485接口上实现。
4.485口也可以控制多种外部设备,例如灯光,窗帘,门禁控制,自动取款机,激光打印机等。
三、485控制协议在高杆云台枪机应用高杆云台枪机通常采用485控制协议,它由驱动器接收器模块实现控制,并通过485总线将控制信号传送到控制器,使枪机可以被控制。
它具有距离远,可靠性强,可以实现远程控制等优点,从而使枪机可以自动跟踪目标,以及进行巡視,探测,报警等代理系统的控制应用。
四、485控制协议的注意事项1.由于485控制协议是低速通信协议,数据传输速率较慢,因此在长距离传输环境中会受到电磁干扰影响,所以安装485口应该注意防止外界电磁干扰对485口的影响。
2.485口应避免长期处于未连接状态,未接上电源情况下不可以长期处于未连接状态,造成485口耗损,影响枪机正常运行。
控制云台的协议
控制云台的协议甲方(服务提供方):名称:________________________________________________________________________地址:________________________________________________________________________法定代表人:__________________________________________________________________联系电话:____________________________________________________________________乙方(服务接受方):名称:________________________________________________________________________地址:________________________________________________________________________法定代表人:__________________________________________________________________联系电话:____________________________________________________________________鉴于甲方是一家专业从事云台控制设备研发、生产与销售的企业,乙方需要使用甲方提供的云台控制设备及相关服务,经双方协商一致,达成如下协议:一、服务内容甲方同意向乙方提供云台控制设备及相关的技术支持服务。
该服务包括但不限于云台的复位、预置设置、调用、删除等基础功能,以及根据乙方需求进行的技术定制和优化。
二、设备标准甲方应保证所提供的云台控制设备符合国家相关标准和乙方的使用需求。
设备应具备良好的稳定性、可靠性和安全性,能够满足乙方在各类应用场景下的需求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
PELCO产品协议解析
PELCO (派尔高)的监控器材在我国有很广泛的应用。
PELCO有自己的传输控制协议,
当它的产品配套使用时,可以互相兼容。
但在某些情况下,由于工程的需要,要求用其它
设备(比如电脑)来控制PELCO的矩阵或镜头,这就要求充分了解PELCO的传输协议。
诶
诺基数码科技有限公司的视频解码软件可完全兼容PELCO协议,可通过PC机控制PELCO的各种设备。
本文为你详细解析PELCO常用协议之一:PELCO-D协议
PELCO-D协议
PELCO-D协议一般用于矩阵和其它设备之间的通信。
它的格式如下:
Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7 同步字地址码命令字1 命令字2 数据1 数据2 校验码
所有的值都是用的16进制表示。
同步字通常都是$FF。
地址码是指与矩阵通信的那台设备的逻辑地址,可以在设备中设置。
命令字1和命令字2设置如下:
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
命令字1 Sence码为0 为0 自动/手动扫
描
摄像机打开/
关闭
光圈关闭光圈打开焦距拉近
命令字2 焦距拉远视角变宽视角变窄上下左右为0
Sence码与Bit4和Bit3有关。
在Bit4和Bit3为1的情况下,如果Sence码为1,则命令就是自动扫描和和摄像机打开;如果Sence码为0,则命令就是手动扫描和摄像机关闭。
当然如果Bit4或Bit3为0的话那命令就无效了。
数据1表示镜头左右平移的速度,数值从$00(停止)到$3F(高速),另外还有一个值是$FF,表示最高速。
数据2表示镜头上下移动的速度,数值从$00(停止)到$3F(最高速)。
校验码是指Byte2到Byte6这5个数的和(若超过255则除以256然后取余数)。
PELCO-D & PELCO-P协议格式
高速球的设置主要包括协议的选择和消息的发送。
高速球的型号是:TMD-SCS18DN使用的协议有:BO1,ALEC,PELCO-9600,PELCO-4800,PELCO-2400,AO1,
SANTACH1650,PEARMAIN,KONY19.2KB KONY20.832,HD600,LILIN,KALATEL, VCL,TOTA,WJ-FS616,PHILIPS,AD.厂家设置的是PELCO-2400.
该协议的具体内容如下:
PELCO-D协议一般用于矩阵和其它设备之间的通信。
它的格式如下:
同步字通常都是 $FF。
地址码是指与矩阵通信的那台设备的逻辑地址,可以在设备中设置。
是自动扫描和和摄像机打开;如果Sence码为0,则命令就是手动扫描和摄像机关闭。
当然如果Bit4或Bit3为0的话那命令就无效了。
数据1表示镜头左右平移的速度,数值从$00(停止)到$3F(高速),另外还有一个值是$FF,表示最高速。
数据2表示镜头上下移动的速度,数值从$00(停止)到$3F(最高速)。
校验码是指Byte2到Byte6这5个数的和(若超过255则除以256然后取余数)。
PELCO-P协议
PELCO-P协议一般采用RS-485传输,波特率为4800,1位起始位和停止位,8
地址码是设备的逻辑地址,可由接收设备上的DIP开关来设定。
校验码是Byte2 到Byte6 这5 个数的异或值(XOR)。
地址码是从0编起的,所以地址码$00表示第一台设备。
PELCO-D和PELCO-P协议另有一些特殊命令,可对设备进行一些高级控制,EXTENDED COMMANDS:
In addition to the “PTZ” commands shown above, there are control commands that allow you access to the more advanced
features of some equipment. The response to one of these commands is four bytes long. The first byte is the synchronization
character (FF), the second byte is the receiver address, the third byte contains the alarm information and the fourth byte is the check sum.
PTZ命令控制说明:
⒈当控制云台水平、上下方向动作或“IRIS”、“FOCUS”、“ZOOM”时需要使相应的控制位为“1”,不用控制的相应位置为“0”
⒉当需要云台PAN/TILT两方向同时动作时,只需将PAN/TILT的相应控制位置“1”即可,PAN/TILT 的速度控制由WORD5/WORD6决定
⒊将WORD3、WORD4的所有位置为“0”可以停止云台的动作
5、扩充命令
(
(
(
(
(。