【精品】《控制工程基础》王积伟_第二版_课后习题解答(完整)
《控制工程基础》(王积伟 吴振顺)课后习题答案 高等教育出版社
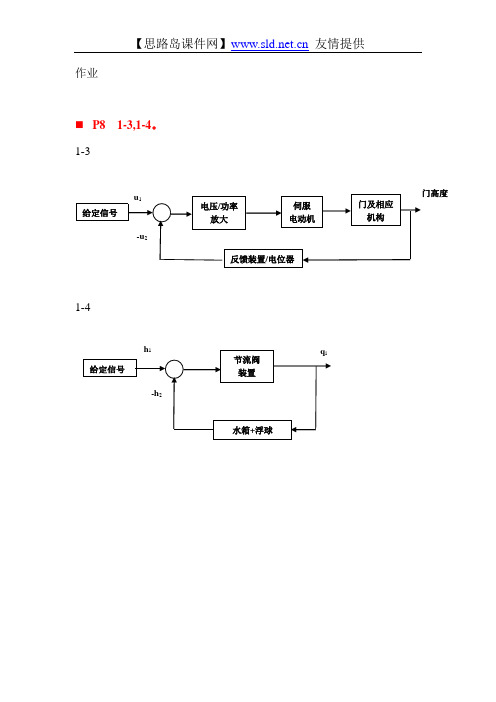
作业P81-3,1-4。
1-31-4(P72)2-1,2-2。
2-1-a22,u u u u u u i c i c -==+dt du dt du c RC RC R i u i22-==dt du dt du i RC u RC =+222-1-b221Kx B B dt dx dt dx =-dt dx dt dx B Kx B 122=+2-1-c2u u u i c -=2212()(1212R C C R i i u R u R u dt du dt du R c i i -+-=+=i dt du dt du u R C R R u R R C R R i 22121221)(2+=++2-1-d22211121x K x K x K B B dt dx dt dx =-+-1122112)(x K B x K K B dt dx dt dx +=++2-1-e1211R u R u R ii -=⎰⎰⎰-+-=+=dt u dt u u u dt i R i u C R i C R R R i R R R CR 211211212111212i dt du dt du u C R u C R R i +=++22212)(⏹ (P72)2-1,2-2 2-1-fdt dy B y K X K y K x K x K x K =--=-2222222111,122121)1(x x y K K K K -+= dt dx K BK dt dx K K B x K x K K x K 121221)1()(1122122-+=-+- 111212112)(x K BK x K K K B dt dx dtdx +=++ 2-22222212121212222311311)(,)()(dt x d dtdx dtdx dtdx dt x d dtdx dtdx dtdx mBx K B mBB x K t f =---=----22322322221)(x K B B m Bdt dx dtx d dtdx +++=313222212113311)()(dt x d dt x d dt x d dtdx dtt df m B B B K=++--22222223233312222313232222322)(])([])([dt x d dtdx dt x d dt x d B B B dtdx dt x d B K dtt df B KB B m x K B B m ++++-+++-+2223213233321424321)(dt x d B K m dt x d B B B m dt x d B m m ++=+222323424][)(12323121213212312121dt x d dt x d dt x d K m B B B B B B K m B m B m B m B m m m +++++++++dt t df dtdx B x K K B B K B B K )(32213213122)]()([=+++++⏹ (P72)2-3:-2)、-4)、-6);2-4:-2)。
控制工程基础王积伟吴振顺课后答案讲课文档
Xi(s)
H2
Xo(s)
G1
G2
G3
H1 G4
a)
北京工商大学 机械121班 刘辉 整理
第三十三页,共136页。
第二章 习题解答
G4
Xi(s) G1
G2
b)
H1
G1
Xi(s)
c)
G2
G3 H
G4
北京工商大学 机械121班 刘辉 整理
第三十四页,共136页。
2-8 按信息传递和转换过程,绘出图示两机械系 统的方框图。
a fi(t)
输入
b
K1
xo 输出
K
xi 输入
B1
m K2
B2
m
B2
xo 输出
北京工商大学 机械121班 刘辉 整理
第二十四页,共136页。
第二章 习题解答
解:
a fi(t)
输入
b
K1
输出 a
xo(t)
mxo(t)
=
b
fi(t)
fK1(t)
北京工商大学 机械121班 刘辉 整理
第六页,共136页。
第一章 习题解答
给定
液位
杠杆
阀门
浮子
给定
液位
a)
开关 电磁阀
北京工商大学 机械121班 刘辉 整理
浮子
b)
第七页,共136页。
水箱 水箱
实际
液位
实际 液位
第二章 习题解答
2-1 试建立图示各系统的动态微分方程,并说明
这些动态方程之间有什么特点。
C1
R1
R2 uo ui(t)
C2
R2
C2
uo(t)
《控制工程基础》第二版课后习题答案
第一章习题解笞U]>U2 U\ U2第二章习题解答2-1a) b)d)f)L^f| 忙d)f\ — fl =^2X O严(f)=$(M+E ⑴虑 如(f) =iQ)RRC^-u o (t)^u o (t) = RC^-u^t) at at fs (r)=B 低[xi (f) -曲(幼 j/B (t)=fK (t) = KXo(t) B dB d 『八10602斤不%()+%©二斤击可()占dR^c —% (0+ (*i + 心)% ⑴=邛应 ~u i (0+ R 2u t (0 atati =i R +,C u o =IR?:R R 严冃3宙 % =gR\ +u oa)=K ](旳一兀)+」:dx o ](J?l + J?2)C —«c (!)+ %("■ R Q C — Wj(O + tti (Oat at(K[ + K2)B — x o (t)+ K\K2X o (t)= K\R 〒曲(f)+ 琦心再(f)dt at10602a) b) c) Q © f)U Q —1/?2 + — j icit— Z/?| + iR-f H —J idte)dxK\% K i (兀 _ %) = K 》(兀)—x)=号二dtoB 2+ (®K° ++ B'B? + 场*3 + 水2〃?)& 2+ (K }B 2+K }B 3 + 心汝 + KM 巴2 + K }K 2X 2 dt3J S + 2用 + 8S-丘($ + 2)($戈+2$十4)广、■炉+ 5,2+9用+7E ($+恥 + 2)乡一rn\fU2K 2rdx { dx 2< dt dt ;/(O™-坷罕~_叭 dtdxj … 一 —- - K?x^ = m dtdx l dx 2dt dt护d 2x 2 2~d^ k,用典2+ (的+创坷+用2创+加2*3);?7皿乔对)13173 G($)= --------------- —(£+。
《控制工程基础》王积伟第二_课后习题解答完整
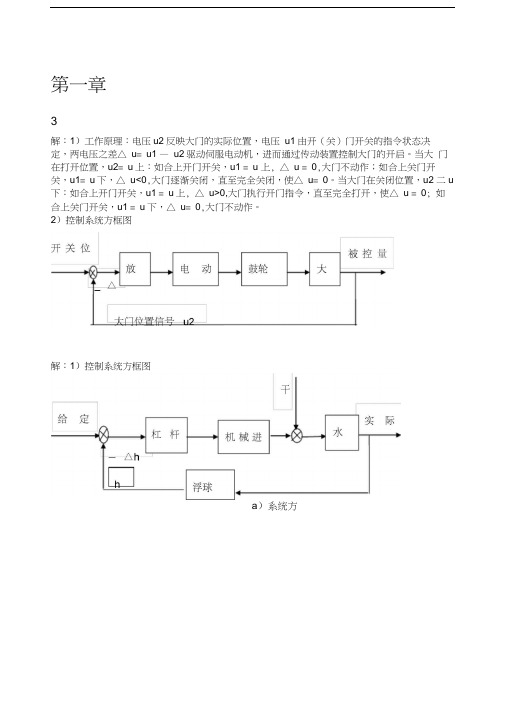
第一章3解:1)工作原理:电压u2反映大门的实际位置,电压u1由开(关)门开关的指令状态决定,两电压之差△ u= u1 —u2驱动伺服电动机,进而通过传动装置控制大门的开启。
当大门在打开位置,u2= u上:如合上开门开关,u1 = u 上, △ u = 0,大门不动作;如合上关门开关,u1= u下,△ u<0,大门逐渐关闭,直至完全关闭,使△ u= 0。
当大门在关闭位置,u2 二u 下:如合上开门开关,u1 = u上, △ u>0,大门执行开门指令,直至完全打开,使△ u = 0; 如合上关门开关,u1 = u下,△ u= 0,大门不动作。
2)控制系统方框图解:1)控制系统方框图a)系统方a )水箱是控制对象,水箱的水位是被控量,水位的给定值 h '由浮球顶杆的长度给定,杠 杆平衡时,进水阀位于某一开度,水位保持在给定值。
当有扰动(水的使用流出量和给水 压力的波动)时,水位发生降低(升高),浮球位置也随着降低(升高),通过杠杆机构是 进水阀的开度增大(减小),进入水箱的水流量增加(减小),水位升高(降低),浮球也随 之升高(降低),进水阀开度增大(减小)量减小,直至达到新的水位平衡。
此为连续控制 系统。
b )水箱是控制对象,水箱的水位是被控量,水位的给定值 h '由浮球拉杆的长度给定。
杠 杆平衡时,进水阀位于某一开度,水位保持在给定值。
当有扰动(水的使用流出量和给水 压力的波动)时,水位发生降低(升高),浮球位置也随着降低(升高),到一定程度后, 在浮球拉杆的带动下,电磁阀开关被闭合(断开),进水阀门完全打开(关闭),开始进水(断水),水位升高(降低),浮球也随之升高(降低),直至达到给定的水位高度。
随后水 位进一步发生升高(降低),到一定程度后,电磁阀又发生一次打开(闭合)。
此系统是离 散控制系统。
2-1 解:(c )确定输入输出变量(u1,u2)得到:CR 2dU 1(1 匹)u 2 =CR 2dU 1-R2u 1 dt R 1 dt R一阶微分方程(e )确定输入输出变量(u1,u2)消去i 得到:(& R 埒汁2牛亡 一阶微分方程第二章2- 2解:1)确定输入、输出变量f (t ) 、X 2□2)工作原理:b )系统方框图干f(t)-fK1⑴-fB 1⑴-fBMF^d^- - 1 -(s 2) (s 1) (s 1)2M(s)=0, 4) D(s)=0,得到极点:一1, M(s)=0, 得到零点:2) 对各元件列微分方程:2f f f _ d X 2(t)fB3 ~'T K2-'T B 2= m 2K1B3 dt 2=K 1X 1; f B1 = B 1 -- -dt B d (x 1 - x2) =B 3 甬;fK2 = K 2X23)4) 5) 拉氏变换.F(s)—KX(s)—B 1SX1G)—B3$(X 1(s) —X 2(s)] = gs 2X 1(s) 叉'B 3S[X 1(s) -X 2(s)] -K 2X2G)-B 2SX2G ) = m 2S 2X 2(s) 消去中间变量: 拉氏反变换:mi|m 2 d 4X d 3X d 2X$ (B 1m 2 七2口1 B s mh B s mJ $(B 1B 3 B 1B 2 B s B ?心口2 ^心)/dt dt dt 2_3(K 1B 2 K 1B 3 K 2B 1 K 2B 3)等 K 1g 弋詈解:(2) (4)1 1 11 1 1 — 29 s 49 s 13 (s 1)(5)(6)-0.25 2s 0.5 2 22 2.5 s2- 5解:1)D(s)=0, M(s)=0,2) D(s)=0, M(s)=0,得到极点:0,0,-2,-5得到零点:一 1 , ' 得到极点:一 2, — 1, —2 得到零点:0 , 0 , — 1+ □0 +oci3) D(s)=O, 得到极点:0,得到零点:一2,2- 8解:1) a )建立微分方程b) 拉氏变换 c) 画单元框图(略) d) 画系统框图mx o (t) = f k (t) f Bl (t) - f B2(t) f k (t)二 k(X i (t) —x °(t))ms 2X o (s) = F k (s) F BI (S ) -F B 2(S )b) 拉氏变换:F k (s )=k (X i (s )-X o (s))F Bi (s)=B i S (X j (s)—X o (s))F B 2(S )工 B 2S X O (S )c) 绘制单元方框图(略)4)绘制系统框图Fi ( s )2)a)建立微分方程:f B1(t) B id (N (t)-")) dtf B2 (t)=B 2 dX o (t) dt由于扰动产生的输出为:要消除扰动对输出的影响,必须使 X o2(S )=0 得到:QK 2K 3G o (s) -K 3K 4S =0第三章3- 1解:1)法一:一阶惯性环节的调整时间为 4T ,输出达稳态值的98%故: 4T = 1min ,得到:T = 15s法二:求出一阶惯性环节的单位阶跃时间响应,代入,求出。
《控制工程基础》王积伟_第二版_课后习题解答

d)画系统框图
2)a)建立微分方程:
b)拉氏变换:
c)绘制单元方框图(略)
4)绘制系统框图
2-11
解:a)
b)
2-14
解:(1)
(2)由于扰动产生的输出为:
要消除扰动对输出的影响,必须使
得到:
得到:
第三章
3-1
解:1)法一:一阶惯性环节的调整时间为4T,输出达稳态值的98%,故:
3-8
解:闭环传递函数
1)K=200:
最大超调量
峰值时间
调整时间
上升时间
振动次数
2)K=150,得到:
依次得到的动态性能指标:0、54,0037s,0、175s,0、02s,2、34。
3)K=13、5,得到:
此时,系统为过阻尼系统,为两个惯性环节串联。
4)对于二阶系统传递函数化为标准形式后,只要 不变,系统调整时间ts不变;随着 增大,过渡过程在缩短(tp,tr),但总过渡时间(调整时间ts)不变;而随着 的减小,振动幅度在加剧,振动次数N、超调量Mp都在加大。
3)单位加速度输入稳态误差;
法二:
3-11
解:开环传递函数 ,此系统为 型系统。
1)稳态误差系数
2)输入信号为阶跃信号、速度信号与加速度信号的组合,它们的系数分别为:
根据信号线性叠加的原理,系统的稳定误差为:
a)当 时,
b)当 时,
c)当 时,
3-12
解:
1)仅有输入信号作用下的稳态误差
偏差传递函数
4T=1min,得到:T=15s
法二:求出一阶惯性环节的单位阶跃时间响应,代入,求出。
2)法一:输入信号 ,就是速度信号;