VC++串口通信编程
visual c++串口通信与工程应用实践

visual c++串口通信与工程应用实践Visual C++是一款强大的集成开发环境,可以用于开发串口通信和工程应用。
它提供了一套丰富的工具和函数库,可以方便地进行串口通信和工程应用的开发。
需要掌握相关的编程技巧和串口通信协议知识,才能更好地实践和应用。
下面是一些实践的步骤:1. 配置串口:在Visual C++中,可以使用WinAPI函数SetCommState和GetCommState来配置串口的波特率、数据位、停止位等参数。
需要定义一个DCB结构体来保存串口的配置信息,然后使用GetCommState获取当前串口的配置信息,修改对应的参数,最后使用SetCommState来设置新的配置。
2. 打开串口:使用WinAPI函数CreateFile来打开串口。
需要提供串口的名称(如"COM1")、访问权限和共享模式等参数。
打开成功后,会返回一个句柄,可以用于后续的读写操作。
3. 读取串口数据:使用ReadFile函数从串口中读取数据。
可以设置一个缓冲区来保存读取的数据,并指定读取的字节数。
ReadFile函数会阻塞,直到有足够的数据可供读取。
4. 写入串口数据:使用WriteFile函数将数据写入串口。
可以将要发送的数据保存到一个缓冲区,然后指定要发送的字节数。
WriteFile函数会阻塞,直到所有数据都被发送。
5. 关闭串口:使用CloseHandle函数关闭串口句柄。
以上是串口通信的基本步骤,可以根据具体的应用需求和功能进行扩展。
在工程应用中,可以根据串口通信的需求来设计和开发相应的功能模块,例如数据采集、控制命令发送等。
可以使用Visual C++的其他功能,如图形界面设计和多线程编程,来增强应用的用户体验和性能。
VC6.0MFC串口通信编写全过程
其于MFC的串口调试助手编辑过程一、新建打开VC6.0 文件新建工程MFC AppWiard(exe) 位置(选择保存工程位置)工程名称(输入工程名XXXX)确定选择基本对话框下一步下一步下一步选择(CXXXXDlg)完成确定在生成的基本对话框内将不需要按钮及提示框(自动生成的“确定”“取消”及提示框)删除或修改使用,至此基本框架完成如下图:二、往生成的基本框架中添加控件1、因为控件列表框内没有串口通信用到的通信控件,所以要先添加到控件列表框内再将控件添加到基本框内使用,步骤如下:菜单栏工程添加到工程Components and controls…Registered ActiveX Controls 选择“Microsoft Communications Control, version 6.0”Insert 确定OK 关闭此子窗口完成添加操作标志如上图所示。
2、将刚才添加添加到控件列表框内的串口控件添加到基本框架内点击控件列表框内的串口控件,此时光标变为“十”形,在基本框架内随意划取一矩形区域,即可以添加串口控件,不需要修改此控件的大小及位置,因为程编译运行后此控件是看不到的,步骤结果如下图:此控件(标志)是下面步骤添加进来的串口控件基本框架3、继续往基本框架内添加用于编辑发送数据的输入编辑框及输出编辑框,同理选择控件列表框内的“编辑框控件”,以相同的操作即可添加两个编辑窗口及一个按纽控件如下图所示:选择其中任意一个作为输入编辑框及输出编辑框这两个窗口需要修改大小及位置,因为程序运行后将会显示而串口通信控件则不显示,上图是运行后的效果。
4、对以上四个控件编程步骤如下:a、右击串口通信控件建立类向导Member variables Control IDS中选择IDC_MSCOMM1 add variable…Member variable name中输入控件变量名m_ctrlComm(变量名可以随意选取,但程序中应与所取变量名一致)OK 确定b、右击编辑框、属性、常规、ID:中输入ID号,此编辑框用于接收显示数据的其ID 号为IDC_EDIT_RXDATA(可以随意选取,但程序中应与所取ID号一致),再在此窗口的样式中勾选”多行”,同时将“自动水平滚动(T)”勾选去掉,再勾选“垂直滚动(V)”,此勾选操作是用于垂直多行显示的,按回车后即可输入;同理右击另一编辑框输入ID号为IDC_EDIT_TXDATA此编辑框用于编辑发送数据的,同样也选上用于垂直多行显示,发送框可以不用垂直多行显示;再为按钮控件添加ID号,为IDC_BUTTON_MANUALSEND,并将标题中的“Button1”改为“发送”,功能是按一次就把发送编辑框中的内容发送一次。
C语言实现串口通信
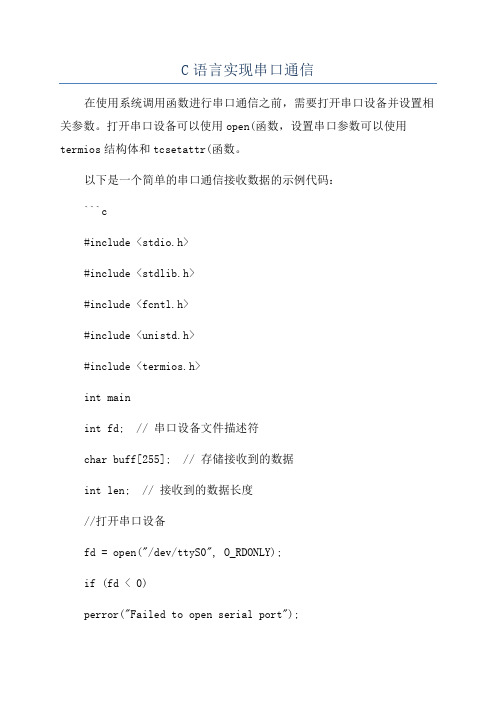
C语言实现串口通信在使用系统调用函数进行串口通信之前,需要打开串口设备并设置相关参数。
打开串口设备可以使用open(函数,设置串口参数可以使用termios结构体和tcsetattr(函数。
以下是一个简单的串口通信接收数据的示例代码:```c#include <stdio.h>#include <stdlib.h>#include <fcntl.h>#include <unistd.h>#include <termios.h>int mainint fd; // 串口设备文件描述符char buff[255]; // 存储接收到的数据int len; // 接收到的数据长度//打开串口设备fd = open("/dev/ttyS0", O_RDONLY);if (fd < 0)perror("Failed to open serial port");return -1;}//设置串口参数struct termios options;tcgetattr(fd, &options);cfsetspeed(&options, B1200); // 设置波特率为1200 tcsetattr(fd, TCSANOW, &options);//接收数据while (1)len = read(fd, buff, sizeof(buff)); // 从串口读取数据if (len > 0)buff[len] = '\0'; // 将接收到的数据转为字符串printf("Received data: %s\n", buff);}}//关闭串口设备close(fd);return 0;```这段代码首先通过open(函数打开串口设备文件"/dev/ttyS0",然后使用tcgetattr(函数获取当前设置的串口参数,接着使用cfsetspeed(函数设置波特率为1200,最后使用tcsetattr(函数将设置好的串口参数写回。
VC++串口通信编程详解
VC++串口通信编程详解在工业控制中,工控机(一般都基于Windows平台)经常需要与智能仪表通过串口进行通信。
串口通信方便易行,应用广泛。
一般情况下,工控机和各智能仪表通过RS485总线进行通信。
RS485的通信方式是半双工的,只能由作为主节点的工控PC机依次轮询网络上的各智能控制单元子节点。
每次通信都是由PC机通过串口向智能控制单元发布命令,智能控制单元在接收到正确的命令后作出应答。
在Win32下,可以使用两种编程方式实现串口通信,其一是使用ActiveX控件,这种方法程序简单,但欠灵活。
其二是调用Windows 的API函数,这种方法可以清楚地掌握串口通信的机制,并且自由灵活。
本文我们只介绍API串口通信部分。
串口的操作可以有两种操作方式:同步操作方式和重叠操作方式(又称为异步操作方式)。
同步操作时,API函数会阻塞直到操作完成以后才能返回(在多线程方式中,虽然不会阻塞主线程,但是仍然会阻塞监听线程);而重叠操作方式,API函数会立即返回,操作在后台进行,避免线程的阻塞。
无论那种操作方式,一般都通过四个步骤来完成:(1)打开串口(2)配置串口(3)读写串口(4)关闭串口1、打开串口Win32系统把文件的概念进行了扩展。
无论是文件、通信设备、命名管道、邮件槽、磁盘、还是控制台,都是用API函数CreateFile来打开或创建的。
该函数的原型为:C++代码1. HANDLE CreateFile( LPCTSTR lpFileName, DWORD dwDesiredAccess, DWORD dwShareMode, LPSECURITY_ATTRIBUTES lpSecurityAttributes, DWORD dwCreationDistribution, DWORD dwFlagsAndAttributes, HANDLE hTemplateFile);lpFileName:将要打开的串口逻辑名,如“COM1”;dwDesiredAccess:指定串口访问的类型,可以是读取、写入或二者并列;dwShareMode:指定共享属性,由于串口不能共享,该参数必须置为0;lpSecurityAttributes:引用安全性属性结构,缺省值为NULL;dwCreationDistribution:创建标志,对串口操作该参数必须置为OPEN_EXISTING;dwFlagsAndAttributes:属性描述,用于指定该串口是否进行异步操作,该值为FILE_FLAG_OVERLAPPED,表示使用异步的I/O;该值为0,表示同步I/O操作;hTemplateFile:对串口而言该参数必须置为NULL。
VC 串口编程基础之如何用 VC 打开串口和关闭串口

VC 串口编程基础之如何用VC 打开串口和关闭串口在对串口进行操作之前都需要先打开串口,VC 串口编程方法分为利用VC 串口控件(或VC 串口类)和直接调用Windows底层API函数(我称之为VC API 串口编程)两种方法,不管哪种方法,其实质都是利用底层API函数对串口进行操作,这里我们来看怎么利用API函数来用VC 打开串口。
在Windows 32位以上操作系统(Win98以上)中,将串口(包括其它通信设备)作为文件来处理,所以串口的打开、读写和关闭所用API函数与文件操作函数一样。
所以打开串口用CreateFile,读串口用ReadFile,写串口用WriteFile,关闭串口用CloseHandle。
一、用VC 打开串口、关闭串口的API函数1、打开串口用CreateFile,其声明如下:1HANDLE CreateFile(2LPCTSTR lpFileName, // file name3DWORD dwDesiredAccess, // access mode4DWORD dwShareMode, // sha re mode5LPSECURITY_ATTRIBUTES lpSecurityAttributes, // SD6DWORD dwCreationDisposition, // how to create7DWORD dwFlagsAndAttributes, // file attributes8HANDLE hTemplateFile // handle to template file9);部分参数解释如下:●lpFileNam e:指定要打开的串口逻辑名,用字符串表示,如“COM1”和“COM2”分别表示串口1和串口2,若要知道您的电脑有哪此串口,可以打开设备管理器查看,如下图所示,或用丁丁串口调试助手,这个工具启动后会枚举系统当前存在的串口。
●dwDesiredAccess:访问类型,有读(dwDesiredAccess=GENERIC_READ)、写(dwDesiredAccess=GENERIC_WRITE)或两者兼有((dwDesiredAccess=GENERIC_READ | GENERIC_WRITE)。
Visual Studio串口通信与测控应用编程实践

4.1.1 单片机测控系统 的组成
1.单片机测控系统的 硬件组成
2.单片机测控系统的 软件组成
4.1.2 单片机开发板B 的功能
4.1.3 单片机开发板B 的主要电路
1.电源电路 2.时钟电路 3.复位电路 4.数码管显示电路 5.串口通信驱动电路
4.2 PC与单片机开发板B组成的测控系统
2017
3.1 典型数据采集卡简 介
3.1.4 PCI-1710HG数据采集卡安装与测 试
1.数据采集卡的性能
2.基于PCI-1710HG数据采 集卡构成的测控系统组成
3.PCI-1710HG数据采集卡 的安装
4.PCI-1710HG数据采集卡 的测试
5.ActiveDAQ控件的安装
3.2 PC与PCI-1710HG数据采集卡组成的测控系统
2.2 PC与西门子S7-200 PLC组成的测控系统
2.2.5 PC端VC++.NET测控程 序设计
1.利用SerialPo-200 PLC组成的测控系统
2.2.6 PC端C#.NET测控程序 设计
1.利用SerialPort控件实现 2.利用MSComm控件实现
03
Part One
3 基于PCI数据采集卡的测控系统
3.1 典型数据采集卡简介
1
3.1.1 数据采集系统概述
2
3.1.2 基于PC的DAQ系统组成
3
3.1.3 .NET语言数据采集与控 制的方式
4
3.1.4 PCI-1710HG数据采集 卡安装与测试
3.1 典型数据采 集卡简介
3.1.1 数据采集系统概述
2018
1.2.3 三菱 PLC端测控程
序设计
串口vc编程步骤及程序
1.添加C++类 CCESeries下面是CCESeries.h 文件的内容:#pragma once//定义串口接收数据函数类型//这是一个回调函数,执行该函数时,表示串口接收到了数据。
typedef void (CALLBACK* ONSERIESREAD)(void * pOwner /*父对象指针*/ ,BYTE* buf /*接收到的缓冲区*/,DWORD dwBufLen /*接收到的缓冲区长度*/);class CCESeries{public:CCESeries(void); //CCESeries类的构造函数~CCESeries(void); //CCESeries类的析构函数public://打开串口BOOL OpenPort(void* pOwner,/*指向父指针*/UINT portNo = 1, /*串口号*/UINT baud = 9600, /*波特率*/UINT parity = NOPARITY, /*奇偶校验*/UINT databits = 8, /*数据位*/UINT stopbits = 0 /*停止位*/);//关闭串口void ClosePort();//同步写入数据BOOL WriteSyncPort(const BYTE*buf , DWORD bufLen);//设置串口读取、写入超时BOOL SetSeriesTimeouts(COMMTIMEOUTS CommTimeOuts);//得到串口是否打开BOOL GetComOpened();private://串口读线程函数,该函数被定义成私有静态。
static DWORD WINAPI ReadThreadFunc(LPVOID lparam);private://关闭读线程,当使用完串口后,便调用这个函数退出串口数据接收线程。
void CloseReadThread();private://已打开的串口句柄// HANDLE m_hComm;//读线程句柄HANDLE m_hReadThread;//读线程ID标识DWORD m_dwReadThreadID;//读线程退出事件HANDLE m_hReadCloseEvent;BOOL m_bOpened; //串口是否打开void * m_pOwner; //指定父对象指针public:ONSERIESREAD m_OnSeriesRead; //串口读取回调函数HANDLE m_hComm;};2.下面是CCESeries.cpp文件的内容:#include "StdAfx.h"#include "CESeries.h"//构造函数,将m_hComm初始化为无效的句柄CCESeries::CCESeries(){//初始化内部变量m_hComm = INVALID_HANDLE_VALUE;m_OnSeriesRead = NULL;m_bOpened = 0;}//析构函数,检测如果串口是打开的,则关闭串口CCESeries::~CCESeries(){if (m_bOpened){//关闭串口ClosePort();}}//串口读线程函数,该线程用于异步接收串口数据。
在VS(VC)2010中使用MSComm控件实现串口通信的详细步骤
// TODO: 在¨²此ä?添¬¨ª加¨®控?件t通ª¡§知a处ä|理¤¨ª程¨¬序¨°代䨲码? }
void CCommTestDlg::OnBnClickedButtonOpen() { // TODO: 在¨²此ä?添¬¨ª加¨®控?件t通ª¡§知a处ä|理¤¨ª程¨¬序¨°代䨲码? }
10. 添加关闭串口按钮的消息响应函数 void CCommTestDlg::OnBnClickedButtonClose() { // TODO: 在此添加控件通知处理程序代码 m_mscomm.put_PortOpen(FALSE);//关闭串口 AfxMessageBox(_T("串口 1 已关闭")); } 11. 添加发送按钮消息响应函数 void CCommTestDlg::OnBnClickedButtonSend() { // TODO: 在此添加控件通知处理程序代码 UpdateData(true); //读取编辑框内容 m_mscomm.put_Output(COleVariant(m_EditSend));//发送数据 m_EditSend.Empty(); //发送后清空输入框 UpdateData(false); //更新编辑框内容 } 12. 接收数据 void CCommTestDlg::OnCommMscomm1() { // TODO: 在此处添加消息处理程序代码 static unsigned int cnt=0; VARIANT variant_inp; COleSafeArray safearray_inp; long len,k; unsigned int data[1024]={0}; byte rxdata[1024]; //设置 BYTE 数组 CString strtemp; if(m_mscomm.get_CommEvent()==2) //值为 2 表示接收缓冲区内有字符 {
VC串口通讯实例
在VC++中有两种方法可以进行串口通讯。
一种是利用Microsoft公司提供的ActiveX 控件Microsoft Communications Control。
另一种是直接用VC++访问串口。
下面将简述这两种方法。
一、Microsoft Communications ControlMicrosoft公司在WINDOWS中提供了一个串口通讯控件,用它,我们可以很简单的利用串口进行通讯。
在使用它之前,应将控件加在应用程序的对话框上。
然后再用ClassWizard 生成相应的对象。
现在我们可以使用它了。
该控件有很多自己的属性,你可以通过它的属性窗口来设置,也可以用程序设置。
我推荐用程序设置,这样更灵活。
SetCommPort:指定使用的串口。
GetCommPort:得到当前使用的串口。
SetSettings:指定串口的参数。
一般设为默认参数"9600,N,8,1"。
这样方便与其他串口进行通讯。
GetSettings:取得串口参数。
SetPortOpen:打开或关闭串口,当一个程序打开串口时,另外的程序将无法使用该串口。
GetPortOpen:取得串口状态。
GetInBufferCount:输入缓冲区中接受到的字符数。
SetInPutLen:一次读取输入缓冲区的字符数。
设置为0时,程序将读取缓冲区的全部字符。
GetInPut:读取输入缓冲区。
GetOutBufferCount:输出缓冲区中待发送的字符数。
SetOutPut:写入输出缓冲区。
一般而言,使用上述函数和属性就可以进行串口通讯了。
以下是一个范例。
#define MESSAGELENGTH 100class CMyDialog : public CDialog{protected:VARIANT InBuffer;VARIANT OutBuffer;CMSComm m_Com;public:......}BOOL CMyDiaLog::OnInitDialog(){CDialog::OnInitDialog();m_Com.SetCommPort(1);if (!m_Com.GetPortOpen()) {m_Com.SetSettings("57600,N,8,1");m_Com.SetPortOpen(true);m_Com.SetInBufferCount(0);SetTimer(1,10,NULL);InBuffer.bstrVal=new unsigned short[MESSAGELENGTH]; OutBuffer.bstrVal=new unsigned short[MESSAGELENGTH]; OutBuffer.vt=VT_BSTR;}return true;}void CMyDiaLog::OnTimer(UINT nIDEvent){if (m_Com.GetInBufferCount()>=MESSAGELENGTH) { InBuffer=m_Com.GetInput();// handle the InBuffer.// Fill the OutBuffer.m_Com.SetOutput(OutBuffer);}CDialog::OnTimer(nIDEvent);}用该控件传输的数据是UNICODE格式。
vc++_串口上位机编程实例 附vc串口通信(接收)
VC++串口上位机简单例程(源码及详细步骤)VC++编写简单串口上位机程序串口通信,MCU跟PC通信经常用到的一种通信方式,做界面、写上位机程序的编程语言、编译环境等不少,VB、C#、LABVIEW等等,我会的语言很少,C语言用得比较多,但是还没有找到如何用C语言来写串口通信上位机程序的资料,在图书管理找到了用VC++编写串口上位机的资料,参考书籍,用自己相当蹩脚的C++写出了一个简单的串口上位机程序,分享一下,体验一下单片机和PC通信的乐趣。
编译环境:VC++6.0操作系统:VMWare虚拟出来的Windows XP程序实现功能:1、PC初始化COM1口,使用n81方式,波特率57600与单片机通信。
PC的COM口编号可以通过如下方式修改:当然也可以通过上位机软件编写,通过按钮来选择COM端口号,但是此次仅仅是简单的例程,就没有弄那么复杂了。
COM1口可用的话,会提示串口初始化完毕。
否则会提示串口已经打开Port already open,表示串口已经打开,被占用了。
2、点击开始转换,串口会向单片机发送0xaa,单片机串口中断接收到0xaa后启动ADC 转换一次,并把转换结果ADCL、ADCH共两个字节的结果发送至PC,PC进行数值转换后在窗口里显示。
(见文章末尾图)3、为防止串口被一只占用,点击关闭串口可以关闭COM1,供其它程序使用,点击后按钮变为打开串口,点击可重新打开COM1。
程序的编写:1、打开VC++6.0建立基于对话框的MFC应用程序Test,2、在项目中插入MSComm控件:工程->增加到工程->Components and Controls->双击Registered ActiveX Controls->选择Microsoft Communications Control, version 6.0->Insert,按默认值添加,你会发现多了个电话图标,这是增加后串口通信控件。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
在工业控制中,工控机(一般都基于Windows平台)经常需要与智能仪表通过串口进行通信。
串口通信方便易行,应用广泛。
一般情况下,工控机和各智能仪表通过RS485总线进行通信。
RS485的通信方式是半双工的,只能由作为主节点的工控PC机依次轮询网络上的各智能控制单元子节点。
每次通信都是由PC机通过串口向智能控制单元发布命令,智能控制单元在接收到正确的命令后作出应答。
在Win32下,可以使用两种编程方式实现串口通信,其一是使用ActiveX控件,这种方法程序简单,但欠灵活。
其二是调用Windows的API函数,这种方法可以清楚地掌握串口通信的机制,并且自由灵活。
本文我们只介绍API串口通信部分。
串口的操作可以有两种操作方式:同步操作方式和重叠操作方式(又称为异步操作方式)。
同步操作时,API函数会阻塞直到操作完成以后才能返回(在多线程方式中,虽然不会阻塞主线程,但是仍然会阻塞监听线程);而重叠操作方式,API函数会立即返回,操作在后台进行,避免线程的阻塞。
无论那种操作方式,一般都通过四个步骤来完成:(1)打开串口(2)配置串口(3)读写串口(4)关闭串口(1)打开串口Win32系统把文件的概念进行了扩展。
无论是文件、通信设备、命名管道、邮件槽、磁盘、还是控制台,都是用API函数CreateFile来打开或创建的。
该函数的原型为:HANDLE CreateFile( LPCTSTR lpFileName,DWORD dwDesiredAccess,DWORD dwShareMode,LPSECURITY_ATTRIBUTES lpSecurityAttributes,DWORD dwCreationDistribution,DWORD dwFlagsAndAttributes,HANDLE hTemplateFile);•lpFileName:将要打开的串口逻辑名,如“COM1”;•dwDesiredAccess:指定串口访问的类型,可以是读取、写入或二者并列;•dwShareMode:指定共享属性,由于串口不能共享,该参数必须置为0;•lpSecurityAttributes:引用安全性属性结构,缺省值为NULL;•dwCreationDistribution:创建标志,对串口操作该参数必须置为OPEN_EXISTING;•dwFlagsAndAttributes:属性描述,用于指定该串口是否进行异步操作,该值为FILE_FLAG_OVERLAPPED,表示使用异步的I/O;该值为0,表示同步I/O操作;•hTemplateFile:对串口而言该参数必须置为NULL;同步I/O方式打开串口的示例代码:HANDLE hCom; //全局变量,串口句柄hCom=CreateFile("COM1",//COM1口GENERIC_READ|GENERIC_WRITE, //允许读和写0, //独占方式NULL,OPEN_EXISTING, //打开而不是创建0, //同步方式NULL);if(hCom==(HANDLE)-1){AfxMessageBox("打开COM失败!");return FALSE;}return TRUE;重叠I/O打开串口的示例代码:HANDLE hCom; //全局变量,串口句柄hCom =CreateFile("COM1", //COM1口GENERIC_READ|GENERIC_WRITE, //允许读和写0, //独占方式NULL,OPEN_EXISTING, //打开而不是创建FILE_ATTRIBUTE_NORMAL|FILE_FLAG_OVERLAPPED, //重叠方式NULL);if(hCom ==INVALID_HANDLE_VALUE){AfxMessageBox("打开COM失败!");return FALSE;}return TRUE;(2)、配置串口在打开通讯设备句柄后,常常需要对串口进行一些初始化配置工作。
这需要通过一个DCB结构来进行。
DCB结构包含了诸如波特率、数据位数、奇偶校验和停止位数等信息。
在查询或配置串口的属性时,都要用DCB结构来作为缓冲区。
一般用CreateFile打开串口后,可以调用GetCommState函数来获取串口的初始配置。
要修改串口的配置,应该先修改DCB结构,然后再调用SetCommState 函数设置串口。
DCB结构包含了串口的各项参数设置,下面仅介绍几个该结构常用的变量:typedef struct _DCB{………//波特率,指定通信设备的传输速率。
这个成员可以是实际波特率值或者下面的常量值之一:DWORD BaudRate;CBR_110,CBR_300,CBR_600,CBR_1200,CBR_2400,CBR_4800,CBR_9600,CBR_19200, CBR_38400,CBR_56000, CBR_57600, CBR_115200, CBR_128000, CBR_256000, CBR_14400DWORD fParity; // 指定奇偶校验使能。
若此成员为1,允许奇偶校验检查…BYTE ByteSize; // 通信字节位数,4—8BYTE Parity; //指定奇偶校验方法。
此成员可以有下列值:EVENPARITY 偶校验 NOPARITY 无校验MARKPARITY 标记校验 ODDPARITY 奇校验BYTE StopBits; //指定停止位的位数。
此成员可以有下列值:ONESTOPBIT 1位停止位 TWOSTOPBITS 2位停止位ONE5STOPBITS 1.5位停止位………} DCB;winbase.h文件中定义了以上用到的常量。
如下:#define NOPARITY 0#define ODDPARITY 1#define EVENPARITY 2#define ONESTOPBIT 0#define ONE5STOPBITS 1#define TWOSTOPBITS 2#define CBR_110 110#define CBR_300 300#define CBR_600 600#define CBR_1200 1200#define CBR_2400 2400#define CBR_4800 4800#define CBR_9600 9600#define CBR_14400 14400#define CBR_19200 19200#define CBR_38400 38400#define CBR_56000 56000#define CBR_57600 57600#define CBR_115200 115200#define CBR_128000 128000#define CBR_256000 256000GetCommState函数可以获得COM口的设备控制块,从而获得相关参数:BOOL GetCommState(HANDLE hFile, //标识通讯端口的句柄LPDCB lpDCB //指向一个设备控制块(DCB结构)的指针);SetCommState函数设置COM口的设备控制块:BOOL SetCommState(HANDLE hFile,LPDCB lpDCB);除了在BCD中的设置外,程序一般还需要设置I/O缓冲区的大小和超时。
Windows用I/O缓冲区来暂存串口输入和输出的数据。
如果通信的速率较高,则应该设置较大的缓冲区。
调用SetupComm函数可以设置串行口的输入和输出缓冲区的大小。
BOOL SetupComm(HANDLE hFile, // 通信设备的句柄DWORD dwInQueue, // 输入缓冲区的大小(字节数)DWORD dwOutQueue // 输出缓冲区的大小(字节数));在用ReadFile和WriteFile读写串行口时,需要考虑超时问题。
超时的作用是在指定的时间内没有读入或发送指定数量的字符,ReadFile或WriteFile 的操作仍然会结束。
要查询当前的超时设置应调用GetCommTimeouts函数,该函数会填充一个COMMTIMEOUTS结构。
调用SetCommTimeouts可以用某一个COMMTIMEOUTS结构的内容来设置超时。
读写串口的超时有两种:间隔超时和总超时。
间隔超时是指在接收时两个字符之间的最大时延。
总超时是指读写操作总共花费的最大时间。
写操作只支持总超时,而读操作两种超时均支持。
用COMMTIMEOUTS结构可以规定读写操作的超时。
COMMTIMEOUTS结构的定义为:typedef struct _COMMTIMEOUTS {DWORD ReadIntervalTimeout; //读间隔超时DWORD ReadTotalTimeoutMultiplier; //读时间系数DWORD ReadTotalTimeoutConstant; //读时间常量DWORD WriteTotalTimeoutMultiplier; // 写时间系数DWORD WriteTotalTimeoutConstant; //写时间常量} COMMTIMEOUTS,*LPCOMMTIMEOUTS;COMMTIMEOUTS结构的成员都以毫秒为单位。
总超时的计算公式是:总超时=时间系数×要求读/写的字符数+时间常量例如,要读入10个字符,那么读操作的总超时的计算公式为:读总超时=ReadTotalTimeo utMultiplier×10+ReadTotalTimeoutConstant 可以看出:间隔超时和总超时的设置是不相关的,这可以方便通信程序灵活地设置各种超时。
如果所有写超时参数均为0,那么就不使用写超时。
如果ReadIntervalTimeout 为0,那么就不使用读间隔超时。
如果ReadTotalTimeoutMultiplier 和ReadTotalTimeoutConstant 都为0,则不使用读总超时。
如果读间隔超时被设置成MAXDWORD并且读时间系数和读时间常量都为0,那么在读一次输入缓冲区的内容后读操作就立即返回,而不管是否读入了要求的字符。
在用重叠方式读写串口时,虽然ReadFile和WriteFile在完成操作以前就可能返回,但超时仍然是起作用的。
在这种情况下,超时规定的是操作的完成时间,而不是ReadFile和WriteFile的返回时间。
配置串口的示例代码:SetupComm(hCom,1024,1024); //输入缓冲区和输出缓冲区的大小都是1024COMMTIMEOUTS TimeOuts;//设定读超时TimeOuts.ReadIntervalTimeout=1000;TimeOuts.ReadTotalTimeoutMultiplier=500;TimeOuts.ReadTotalTimeoutConstant=5000;//设定写超时TimeOuts.WriteTotalTimeoutMultiplier=500;TimeOuts.WriteTotalTimeoutConstant=2000;SetCommTimeouts(hCom,&TimeOuts); //设置超时DCB dcb;GetCommState(hCom,&dcb);dcb.BaudRate=9600; //波特率为9600dcb.ByteSize=8; //每个字节有8位dcb.Parity=NOPARITY; //无奇偶校验位dcb.StopBits=TWOSTOPBITS; //两个停止位SetCommState(hCom,&dcb);PurgeComm(hCom,PURGE_TXCLEAR|PURGE_RXCLEAR);在读写串口之前,还要用PurgeComm()函数清空缓冲区,该函数原型:BOOL PurgeComm(HANDLE hFile, //串口句柄DWORD dwFlags // 需要完成的操作);参数dwFlags指定要完成的操作,可以是下列值的组合:PURGE_TXABORT 中断所有写操作并立即返回,即使写操作还没有完成。