镜头成像角度计算
(完整版)监控镜头焦距与角度、照射距离参数

镜头选配参考标准在实际应用中,经常听到有用户提出诸如某摄像机能够“看多远”之类的问题,比如100m 500m甚至1km远外的物体还能否在监视器上清晰地显示出来。
有了前面关于镜头的成像尺寸、焦距及视场角等概念后,这个问题就不难解释了,即“看多远”问题与许多因素有关。
比如说,用某定焦镜头可以看清100 m远处的钞票的面值。
一般来说,镜头焦距越长,“看”得就越远,但同时视场角却变小,结果观看的范围变窄了。
举个简单的例子,若用标准镜头刚好看清远处某人的基本特征(是男或是女),则换用长焦距镜头则可能看清其面部特征(是否有痣或疤),但却无法看见该人穿的是什么裤子和鞋(这部分已经“涨”出了画面),而换用广角镜头则只可能看到画面中有人(连男女都分辨不出),但却可看清该人在整个监视场景中的所处的位置,周围还有什么别的人物或参照物。
因此,关于“看多远”的较为科学的说法应该是“在屏幕上成的像大小可对应于实际观测距离处多高或多宽的景物”。
例如,用8mn镜头观测10m远处的景物,如果该处有10个人站成一排则刚好可横向充满整个监视器屏幕。
一般情况下,为了能够较为清楚的探测到监视范围内的目标并实现自动跟踪,一般要求在CCD靶面上的目标至少占有三行电视线。
若要能分辨出人物,则一般应要求人物的面部成像在356m(14in )监视器上占到12.7mm(0.5in)以上。
在实际应用中,经常会有用户提出该摄像机能看清楚多么远的物体或该摄像机能看清楚多宽的场景等问题,这实际上要由所选用的镜头的焦距来决定,另外还与所选择的摄像机的分辨率及监视器的分辨率有关。
光学系统的焦距是指光组主点到焦点的距离。
而镜头的焦距实际上就是构成镜头的组合光组的焦距,它决定了摄取图像的大小,用不同焦距的镜头对同一位置的物体摄像时,配长焦距镜头的摄像机所摄取的景物尺寸就大,反之,配短焦距镜头的摄像机所摄取的景物尺寸就小。
理论上,任何一种镜头均可拍摄很远处的物体,并在摄像机的成像靶面上成一个很小的像,但受象素的限制,当成像小到小于图像传感器的一个象素大小时,便不再能形成被摄物体的像,即便成像有几个象素大小,该像也难以辨别为何物。
摄像头焦距算法
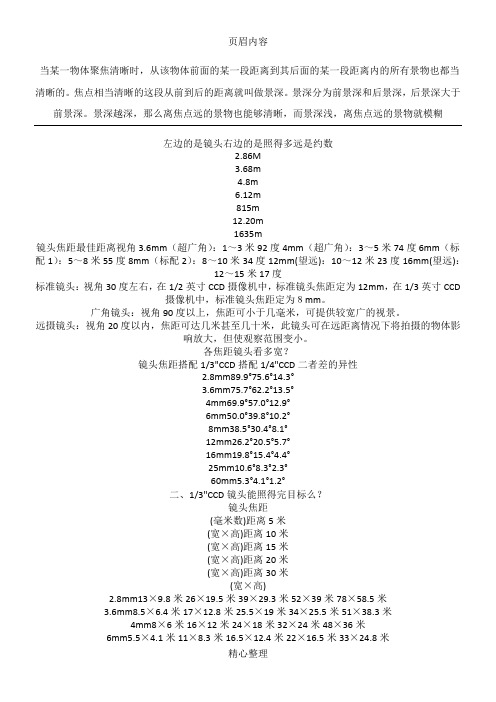
当某一物体聚焦清晰时,从该物体前面的某一段距离到其后面的某一段距离内的所有景物也都当清晰的。
焦点相当清晰的这段从前到后的距离就叫做景深。
景深分为前景深和后景深,后景深大于前景深。
景深越深,那么离焦点远的景物也能够清晰,而景深浅,离焦点远的景物就模糊左边的是镜头右边的是照得多远是约数2.86M3.68m4.8m6mm(标配1):望远):英寸CCD(毫米数)距离5米(宽×高)距离10米(宽×高)距离15米(宽×高)距离20米(宽×高)距离30米(宽×高)2.8mm13×9.8米26×19.5米39×29.3米52×39米78×58.5米3.6mm8.5×6.4米17×12.8米25.5×19米34×25.5米51×38.3米4mm8×6米16×12米24×18米32×24米48×36米6mm5.5×4.1米11×8.3米16.5×12.4米22×16.5米33×24.8米8mm3.5×2.6米7×5.3米10.5×7.9米14×10.5米21×15.8米12mm2×1.5米4×3米6××4.5米8×6米12×9米16mm1.5×1.1米3×2.3米4.5×3.4米6×4.5米9×6.8米25mm1.3×1米2.5×1.9米3.8×2.9米5×3.8米7.5×5.6米60mm0.5×0.4米1×0.75米1.5×1.1米2×1.5米3×2.3米三、1/3"CCD镜头最远能看清多少米?3.6MM、6MM、8MM、12MM、16MM、25MM乘上2.4就是最远多少米距离了镜头的种类镜头的种类有许多种,每一种镜头都有其特点。
监控摄像机镜头角度和距离计算
监控摄像机镜头角度和距离计算
选用镜头焦距的理论计算:
摄取景物的镜头视场角是极为重要的参数,镜头视场角随镜头焦距及摄像机规格大小而变化其变化关系如前所述,覆盖景物镜头的焦距可用下述公式计算:
1
f=u·D/U
2f=h·D/H
f:镜头焦距、U:景物实际高度、H:景物实际宽度、D:镜头至景物实测距离、u:图像高度、h:图像宽度
举例说明:当选用1/2″镜头时,图像尺寸为u=4.8mm,h=6.4mm;镜头至景物距离D=3500mm,景物的实际高度为U=2500mm景物的实际宽度可由下式算出H=1.333·U,这种关系由摄像机取景器CCD片决定;将以上参数代入公式1中,可得f=4.8·3500/2500=6.72mm,故选用6mm定焦镜头即可;
摄像机拍摄的视角与镜头的毫米数、CCD的尺寸大小密不可分,下表为镜头毫米数与搭配的CCD拍摄视角的对应关系仅供参考;
镜头毫米数与搭配的CCD拍摄视角的对应关系
1/3″CCD搭配镜头拍摄范围的尺寸如下表所示:
备注:同样毫米数的镜头搭配1/4″的CCD芯片拍摄的范围和角度稍微窄一点,但是拍摄画面中的物体看起来要大一点.表中的数据为水平方向的视场角度,如果摄像机装在高处往低处监看时,视场角和拍摄范围要稍微大一些,但拍摄画面中的物体要稍微小一点;
1/3"CCD搭配镜头拍摄范围的尺寸
摄像机镜头与观察角度,观察距离关系图
监控摄像机镜头的选用。
镜头角度与距离计算方法

专用的镜头角度计算方法镜头焦距的计算1公式计算法:视场和焦距的计算视场系指被摄取物体的大小,视场的大小是以镜头至被摄取物体距离,镜头焦头及所要求的成像大小确定的。
1、镜头的焦距,视场大小及镜头到被摄取物体的距离的计算如下;f=wL/W 2、f=hL/hf;镜头焦距w:图象的宽度(被摄物体在ccd靶面上成象宽度)W:被摄物体宽度L:被摄物体至镜头的距离h:图象高度(被摄物体在ccd靶面上成像高度)视场(摄取场景)高度H:被摄物体的高度ccd靶面规格尺寸:单位mm规格W H1/3" 4.8 3.61/2" 6.4 4.82/3" 8.8 6.61" 12.7 9.6由于摄像机画面宽度和高度与电视接收机画面宽度和高度一样,其比例均为4:3,当L不变,H或W增大时,f变小,当H或W不变,L增大时,f增大。
2视场角的计算如果知道了水平或垂直视场角便可按公式计算出现场宽度和高度。
水平视场角β(水平观看的角度)β=2tg-1= 垂直视场角q(垂直观看的角度)q=2tg-1= 式中w、H、f同上水平视场角与垂直视场角的关系如下:q=或=q 表2中列出了不同尺寸摄像层和不同焦距f时的水平视场角b的值,如果知道了水平或垂直场角便可按下式计算出视场角便可按下式计算出视场高度H和视场宽度W.H=2Ltg、W=2Ltg 例如;摄像机的摄像管为17mm(2/3in),镜头焦距f为12mm,从表2中查得水平视场角为40℃而镜头与被摄取物体的距离为2m,试求视场的宽度w。
W=2Ltg=2×2tg=1.46m 则H=W=×1.46=1.059m 焦距f越和长,视场角越小,监视的目标也就小。
图解法如前所示,摄像机镜头的视场由宽(W)。
高(H)和与摄像机的距离(L)决定,一旦决定了摄像机要监视的景物,正确地选择镜头的焦距就由来3个因素决定;*.欲监视景物的尺寸*.摄像机与景物的距离*.摄像机成像器的尺士:1/3"、1/2"、2/3"或1"。
镜头角度与距离计算方法

镜头角度与距离计算方法部门: xxx时间: xxx整理范文,仅供参考,可下载自行编辑专用的镜头角度计算方法镜头焦距的计算1公式计算法:视场和焦距的计算视场系指被摄取物体的大小,视场的大小是以镜头至被摄取物体距离,镜头焦头及所要求的成像大小确定的。
b5E2RGbCAP1、镜头的焦距,视场大小及镜头到被摄取物体的距离的计算如下;f=wL/W2、f=hL/hf;镜头焦距 w:图象的宽度<被摄物体在ccd靶面上成象宽度)W:被摄物体宽度L:被摄物体至镜头的距离h:图象高度<被摄物体在ccd靶面上成像高度)视场<摄取场景)高度H:被摄物体的高度ccd靶面规格尺寸:单位mm规格 W H1/3" 4.8 3.61/2" 6.4 4.82/3" 8.8 6.61" 12.7 9.6 p1EanqFDPw由于摄像机画面宽度和高度与电视接收机画面宽度和高度一样,其比例均为4:3,当L不变,H或W增大时,f变小,当H或W不变,L 增大时,f增大。
DXDiTa9E3d2视场角的计算如果知道了水平或垂直视场角便可按公式计算出现场宽度和高度。
水平视场角β<水平观看的角度)β=2tg-1= 垂直视场角q<垂直观看的角度) q=2tg-1= 式中w、H、f同上水平视场角与垂直视场角的关系如下: q=或=q 表2中列出了不同尺寸摄像层和不同焦距f时的水平视场角b的值,如果知道了水平或垂直场角便可按下式计算出视场角便可按下式计算出视场高度H和视场宽度W. H=2Ltg、W=2Ltg 例如;摄像机的摄像管为17mm(2/3in>,镜头焦距f为12mm,从表2中查得水平视场角为40℃而镜头与被摄取物体的距离为2m,试求视场的宽度w。
W=2Ltg=2×2tg=1.46m 则H=W=×1.46=1.059m 焦距f越和长,视场角越小,监视的目标也就小。
相机偏差角度计算

相机偏差角度计算在相机偏差角度计算中,有两个重要的概念:相机的光学中心和主点。
相机的光学中心是指相机的光学轴通过相机的中心点,即相机镜头的中心点。
而主点是指当相机成像时,成像平面上与相机光学轴的交点位置。
在相机成像过程中,由于相机的光学结构和机械结构的特性,会引起成像偏差。
这些偏差可以分为径向畸变和切向畸变。
径向畸变是指由于镜头的曲率半径不同引起的图像畸变,而切向畸变是指由于焦点不在图像中心引起的图像畸变。
对于相机的光学中心和主点,它们之间的位置关系可以通过相机标定来确定。
相机标定是指利用已知的三维空间点和它们在相机坐标系中的投影点的对应关系,来确定相机内参(包括焦距、主点位置等)和外参(包括相机位置和姿态等)的过程。
在进行相机偏差角度计算时,首先需要进行相机的标定。
标定方法通常包括使用棋盘格或特定的校准板进行拍摄,通过对拍摄的影像进行处理,确定相机的内参和外参。
内参包括焦距、主点位置等和相机的镜头结构有关。
外参包括相机的位置和姿态等和相机在物体坐标系中的位置关系有关。
通过相机的标定结果,可以进行相机的畸变校正。
畸变校正是指根据相机的标定参数,将成像过程中产生的径向畸变和切向畸变进行校正,使得图像能够更加准确地表示真实场景。
相机偏差角度计算主要利用畸变校正后的图像进行。
首先,根据畸变校正后的图像,确定图像上的特征点位置。
这些特征点可以是图像上的角点或其他明显的特征点。
然后,通过相机的内参和外参,将图像上的特征点映射到物体坐标系中的位置。
最后,利用这些结构化的特征点位置,可以计算相机的偏差角度。
相机的偏差角度计算可以通过多种方法实现,其中最常用的方法是使用三角测量。
三角测量是指通过已知的三维空间点和它们在图像上的投影点的对应关系,计算相机的位置和姿态的方法。
根据相机的位置和姿态,可以计算相机的偏差角度。
在实际应用中,相机偏差角度的计算可以用于校正相机成像过程中的偏差,提高相机的成像精度和准确性。
同时,相机偏差角度的计算还可以应用于计算机视觉和机器人技术中,进行目标定位、运动估计和路径规划等任务。
摄像机焦距和视场角计算

摄像机焦距和视场角计算摄像机焦距和视场角是常用的摄影和摄像术语,用于描述摄像机镜头的属性。
摄像机焦距是指摄像机镜头的光学焦点到图像传感器(或胶片)的距离,通常以毫米(mm)为单位表示。
焦距决定了摄像机的视场角度,即摄像机镜头能够捕捉到的景物范围。
在计算摄像机焦距和视场角的过程中,首先需要了解以下几个概念:1.传感器尺寸:摄像机传感器是指将光线转换为电信号的装置,通常有不同尺寸的传感器可选择。
传感器尺寸较大的摄像机具有更高的分辨率和更好的低光性能。
2.画幅尺寸:画幅尺寸是指摄像机拍摄到的画面范围的宽度和高度,通常以横向和纵向的长度表示。
3.视场角(FOV):视场角是指摄像机能够捕捉到的画面范围,通常以水平、垂直或对角线的度数表示。
视场角越大,摄像机可以捕捉到的范围就越广。
接下来,我们将介绍计算摄像机焦距和视场角的几种方法:1. 透镜公式法:透镜公式法是根据透镜公式计算焦距的方法。
透镜公式表示为1/f = 1/d0 + 1/di,其中f表示透镜焦距,d0表示物距,di 表示像距。
在摄像机中,物距可以近似等于无穷大(对于远离摄像机的物体),因此透镜公式可以简化为1/f ≈ 1/di。
通过测量成像距离di,就可以得到透镜的焦距f。
2. 画幅倍率法:画幅倍率法是基于不同画幅尺寸之间的比例关系计算焦距的方法。
通常,标准35mm画幅(36x24mm)被认为是基准画幅,其焦距与其他画幅下的焦距之间存在倍数关系。
通过将标准35mm画幅的焦距与其他画幅下的焦距进行比较,可以计算出与之相对应的焦距。
3.视场角计算:一旦得到了焦距,就可以通过以下公式计算视场角:视场角 = 2 * arctan(0.5 * 画幅尺寸 / 焦距)其中,arctan表示反正切函数。
视场角可以通过焦距和画幅尺寸来计算,可以根据需要计算水平、垂直或对角线的视场角度。
需要注意的是,焦距和视场角之间存在一种相反的关系。
焦距越短,视场角越大,焦距越长,视场角越小。
视场和焦距的计算方法
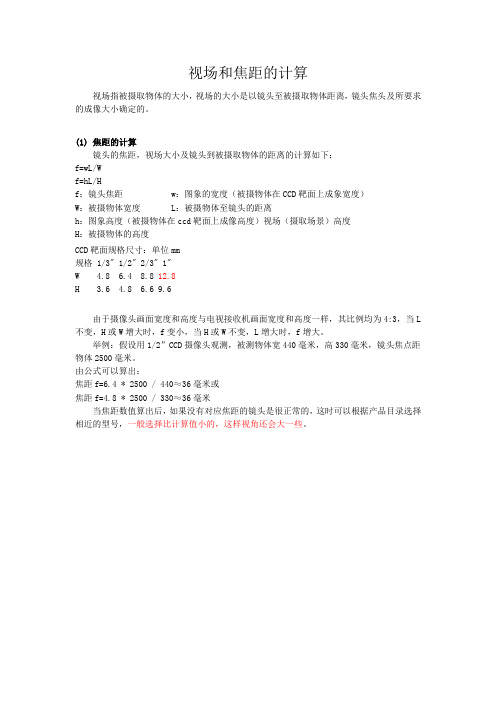
视场和焦距的计算视场指被摄取物体的大小,视场的大小是以镜头至被摄取物体距离,镜头焦头及所要求的成像大小确定的。
(1) 焦距的计算镜头的焦距,视场大小及镜头到被摄取物体的距离的计算如下:f=wL/Wf=hL/Hf;镜头焦距 w:图象的宽度(被摄物体在CCD靶面上成象宽度)W:被摄物体宽度 L:被摄物体至镜头的距离h:图象高度(被摄物体在ccd靶面上成像高度)视场(摄取场景)高度H:被摄物体的高度CCD靶面规格尺寸:单位mm规格 1/3" 1/2" 2/3" 1"W 4.8 6.4 8.8 12.8H 3.6 4.8 6.6 9.6由于摄像头画面宽度和高度与电视接收机画面宽度和高度一样,其比例均为4:3,当L 不变,H或W增大时,f变小,当H或W不变,L增大时,f增大。
举例:假设用1/2”CCD摄像头观测,被测物体宽440毫米,高330毫米,镜头焦点距物体2500毫米。
由公式可以算出:焦距f=6.4 * 2500 / 440≈36毫米或焦距f=4.8 * 2500 / 330≈36毫米当焦距数值算出后,如果没有对应焦距的镜头是很正常的,这时可以根据产品目录选择相近的型号,一般选择比计算值小的,这样视角还会大一些。
(2) 视场角的计算如果知道了水平或垂直视场角便可按公式计算出现场宽度和高度。
W=2LtanQw/2 ( Qw:水平视角)H=2LtanQh/2 ( Qh:垂直视角)水平视场角Qw(水平观看的角度)Qw =2tg-1(W/2L)垂直视场角Qh(垂直观看的角度)Qh =2tg-1(H/2L)视场由宽(W)、高(H)和与摄像头的距离(L)决定,一旦决定了摄像头要监视的景物,正确地选择镜头的焦距就由3个因素来决定:l 、欲监视景物的尺寸2、摄像头与景物的距离3、摄像头成像器的尺寸(3)、选配镜头的原则为了获得预期的摄像效果,在选配镜头时,应着重注意六个基本要素:(1)被摄物体的大小;(2) 被摄物体的细节尺寸;(3) 物距;(4)焦距;(5) CCD摄像机靶面的尺寸;(6) 镜头摄像系统的分辩率。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
镜头成像角度计算
在查看数码相机规格时,我们常会说某相机的「实际焦距」是多少mm ,
然后又相当于传统35mm 相机(下面有解释)的多少mm,究竟「等效焦距」是如何计算的呢?
首先,我们得了解「等效焦距」的问题并非始于数码相机,而是自传统相机
即有。
最著名的问题便是「标准镜头」的焦距问题。
1. 什么是[标准镜头]?
当镜头的摄角和人类双眼的视角相近时,便可称为「标准镜头」。
对35mm 的传统相机( 底片24x36mm )而言,50mm 的镜头和人类双眼的感觉最接近( 您要说55mm 的镜头也可以),所以,我们说50mm 属于「标准镜头」。
(设摄角为Fov)。
Fov= 2x( Tan^(-1)) ( 底片长度/ (2x镜头焦距))
对于35mm 的传统相机,采用标准镜头(50mm),底片36x24mm,底片对角线约为43.3mm。
可得出:
Fov=46.79 °
H-Fov=39.59 °(水平Fov)
V-Fov = 26.99 °(垂直Fov)
若换成45相机(45相机用的是4'x5' 的底片),标准镜头可不是50mm 哦!为了维持相同的摄角( 46.79 ° ),我们将Fov 值往回带,求「镜头焦距」,便可得到180mm。
所以,180mm 的镜头对于一般35mm 相机而言,虽是长镜头,对45相机来说却还是标准镜头呢!
2. 等效焦距
在数码相机上,因为各数码相机的对应情况不一,为了让摄影者容易了解摄角的问题,便采用了「等效焦距」的说法。
来看数码相机的情况。
我们已经知道,重点是「维持相同的摄角」,便可以验算出数码相机的等效焦距。
消费级数码相机的影像感测面积比传统相机小了许多。
例子1:我们以10X 光学变焦的C-2100UZ 为例,原厂的规格是实际焦距为7 - 70mm,CCD 为1/2' 型(下面有解释),相当于35mm 传统相机的38 - 380mm 。
我们以1X 的广角端和10X 的远望端,数码相机跟传统相机各验算一次,看看是不是能「维持相同的摄角」。
传统35mm相机:
Fov (1x) = 2 x arctan (43.3/(2x38))=59.34 °
Fov (10x) = 2 x arctan (43.3/(2x380))=6.52 °
数码相机C-2100UZ
Fov (1x) = 2 x arctan (8/(2x7))=59.49°
Fov (10x) = 2 x arctan (8/(2x70))=6.54 °
由计算可得知,原厂提供的“相当于35mm 传统相机的38 - 380mm ”是一正确的信息。
例子2:以4X光学变焦Canon Power Shot A610为例。
原厂的规格是实际焦距为7.3-29.2mm,CCD 为1/1.8' 型,相当于35mm 传统相机的35-140 mm。
我们以1X 的广角端和4X 的远望端,数码相机跟传统相机各验算一次,看看是不是能「维持相同的摄角」。
传统35mm相机:
Fov (1x) = 2 x arctan (43.3/(2x35))=63.48 °
Fov (4x) = 2 x arctan (43.3/(2x140))= 17.58°
数码相机Canon Power Shot A610
Fov (1x) = 2 x arctan (8.932/(2x7.3))=62.91°
Fov (4x) = 2 x arctan (8.932/(2x29.2))= 17.39°
由计算可得知,原厂提供的“相当于35mm 传统相机的35-140 mm”是一正确的信息。
至于摄角小有误差导因于两种感光「底片」的长宽比有所不同。
另外,我们得注意,「焦距等效」并不代表「景深等效」。
3. 拼合柱状全景图,使用普通消费型数码相机水平需要拍摄多少张图像?
我们以数码相机Canon Power Shot A610(CCD为1/1.8'型,7.176x5.319mm)为例,计算广角端(1X)Fov:
Fov = 2 x arctan (8.932/(2x7.3))=62.91°
H-Fov = 2 x arctan (7.176/(2x7.3))=52.35°
V-Fov = 2 x arctan (5.319/(2x7.3))=40.03°
如果不考虑重叠范围,水平需要拍摄7张。
(这是不现实的)
考虑25度的重叠范围,水平需要拍摄13张。
来自: /sacrtap/blog/item/757a3edd821604d38c1029de.html。