基于ADAMS的多接触问题研究
基于ADAMS的灵敏轴承摩擦力矩的仿真分析_刘蕾

第29卷第11期2012年11月机械设计JOURNAL OF MACHINE DESIGNVol.29No.11Nov.2012基于ADAMS的灵敏轴承摩擦力矩的仿真分析*刘蕾,陈晓阳,俞力铭,姜绍娜,张剑(上海大学轴承研究室,上海200072)摘要:灵敏轴承的摩擦力矩是稳定轴上干扰力矩的主要来源,其大小和波动性直接影响到系统工作的稳定性和可靠性。
根据灵敏轴承的实际工作情况,在所建立的灵敏轴承物理仿真模型的基础上,采用动力学分析软件ADAMS进行仿真分析,基于赫兹接触理论计算结果设置基本的接触参数,对比研究了不同球数灵敏轴承和不同轴向载荷下灵敏轴承的摩擦力矩性能。
关键词:灵敏轴承;摩擦力矩;ADAMS;动力学仿真中图分类号:TH133文献标识码:A文章编号:1001-2354(2012)11-0049-05陀螺稳定平台广泛应用在航天等现代尖端技术产品中,高灵敏、低摩擦力矩的陀螺仪框架灵敏轴承与陀螺仪马达转子轴承的精度和寿命高低是影响其定向及定位系统的重要因素[1]。
高精度的稳定平台要求其框架灵敏轴承具有很高的运动精度、支承刚度、小而稳定的摩擦力矩与精度保持性,这样才能使其定位精度高,确保惯导系统的姿态稳定和指示精度[2-3]。
灵敏轴承的摩擦力矩是稳定轴上干扰力矩的主要来源,其大小和波动值直接影响系统工作的稳定性和可靠性。
其中摩擦力矩的大小不仅与轴承结构、尺寸、几何精度、材料及热处理性能等参数有关,还与工作载荷、装配精度、润滑条件及使用环境因素有关,各种因素相互作用又相互干扰,分析过程复杂[4]。
到目前为止,国内外有大量学者进行轴承的力学模型分析研究,随着计算机技术的发展,利用计算机仿真、模拟各种因素对轴承性能的影响成为世界轴承行业的新动向[5-7]。
但目前国内外使用ADAMS软件进行动力学仿真模拟,多是针对高速重载下的滚动轴承,没有针对低速、轻载下的灵敏轴承,尤其是摩擦力矩的动力学仿真研究。
因此,文中在已有研究工作基础上,使用UG软件对灵敏轴承进行三维仿真物理建模,并将此模型导入商业软件ADAMS中进行轴承的低速动态特性仿真,获得了不同球数轴承和不同轴向载荷下一系列的启动和动态摩擦力矩数据。
基于Adams进行复杂接触分析的等效方法
基于Adams进行复杂接触分析的等效方法作者:谭勇朱成贤来源:《计算机辅助工程》2013年第03期摘要:基于Adams软件,通过对运动副进行组合研究提出复杂接触分析的等效方法.对某案例模型进行仿真和试验,仿真结果与试验结果吻合.该等效方法对于复杂接触模型的分析精度高,有利于提高模型的计算效率.所提出等效分析方法具有重要的工程参考意义和工程运用价值.关键词:接触分析;运动副; Adams中图分类号:TH112文献标志码:B0引言在机械产品的设计中,一个运动结构件沿另一个固定结构件的定位面快速滑动的机构被广泛运用(如过山车和轨道列车等).在进行此类机构的动力学分析时,往往需要准确模拟接触力以进一步分析运动结构件的姿态、运动等特性;对于固定结构件为柔性体时,还需分析固定结构件的变形和振动等特性.若固定结构件的定位面为复杂定位面(如曲面等),采用Adams软件分析此类快速且变速滑动问题时,接触参数设置困难.仿真时,在复杂接触面上容易产生冲击过载,接触力不易稳定,会严重降低多体动力学的分析精度.本文通过对运动副进行组合研究,提出复杂接触分析的等效分析方法.该方法提高接触力的分析精度;同时减小多体动力学模型中接触定义的数量,较大提高模型的计算效率.1等效方法的提出基于Adams软件进行复杂接触分析的等效方法研究实际上是多体动力学的深入应用问题.对于受约束的多体系统,其动力学方程是先根据牛顿定理给出自由物体的变分运动方程,再运用拉格朗日乘子定理导出基于约束的多体动力学方程.运动副约束反作用力和反作用力矩的计算公式为F″ki=-CTiATiΦkTriλk (1)T″ki=-CTi(ΦkTπti-s~′piATiΦkTri)λk(2)上式考虑典型运动副k,运动副定义点为p,约束方程为Φk=0,λk为拉格朗日乘子,Ci为从运动副定义坐标系到连体坐标系的方向余弦变换矩阵.[1]在基于Adams软件的多体动力学模型中,运动副设计合理和自由度数符合要求,则动力学模型对于各约束反力的求解精度高.利用这一特点,通过组合运动副的方法来等效实现接触力的传递.等效分析方法如下:(1)结构件处理为刚体情况.对运动结构件的自由度及运动边界进行分析;通过哑物体技术和参数化技术,模拟运动结构件的自由度及运动范围;进行多体动力学模型装配.(2)结构件处理为柔性体情况.进行运动结构件的自由度及运动边界分析;利用模态综合法建立柔性体模型或刚柔混合模型;利用哑物体技术建立刚性虚拟定位面,模拟柔性结构件的滑行定位面,进行刚性虚拟定位面与柔性结构件的受力传递分析,并根据实际情况确定其约束关系;通过哑物体技术和参数化技术,模拟运动结构件的自由度及运动范围;通过传感器技术、仿真剧本控制技术和用户自定义子程序技术实现刚性虚拟定位面与柔性结构件约束关系的动态调整.[2]2案例分析2.1案例机构模型某运动结构件通过3个滑块与固定结构件的3个滑槽接触,滑块与滑槽存在较小间隙;滑槽前端平直,后端为沿一定曲率变化的曲面,见图1.机构工作时,运动结构件加速运动.3结束语在工程设计中会经常出现复杂多样的接触情况,直接采用接触算法求解此类问题的难度大、计算精度和计算效率低.基于Adams软件,采用组合运动副方法对接触进行等效分析,并与试验结果进行对比.对比结果表明本文提出的复杂接触等效分析方法计算精度高,可适当提高计算效率.在复杂接触情况下,该等效方法对于分析物体振动特性、运动特性和姿态特性等问题时具有重要的工程参考意义和工程运用价值.参考文献:[1]陈立平,张云清. 机械系统动力学分析及Adams应用教程[M]. 北京:清华大学出版社, 2005: 43-53.[2]王国强,张进平. 虚拟样机技术及其在Adams上的实践[M]. 西安:西北工业大学出版社, 2002: 66-72.[3]邢俊文. Adams/Flex与AutoFlex培训教程[M]. 北京:科学出版社, 2006: 64-67.(编辑于杰)。
ADAMS中的接触和接触摩擦作用机制实例详解
ADAMS中的接触和接触摩擦作用机制实例详解高一佳【摘要】文章首先从理论上详细说明了ADAMS软件中的接触和接触摩擦在模型中的作用机制.然后结合拉臂式垃圾车动力学分析实例,研究了各参数变动对接触造成的影响.最后给出了解决接触求解无法收敛问题的一般原则.【期刊名称】《汽车实用技术》【年(卷),期】2017(000)006【总页数】4页(P64-66,75)【关键词】ADAMS;接触;接触摩擦【作者】高一佳【作者单位】陕西保利特种车制造有限公司,陕西西安710200【正文语种】中文【中图分类】U461CLC NO.:U461Document Code:AArticle ID:1671-7988 (2017)06-64-04即使是经验丰富的分析工程师,在处理包含接触和接触摩擦的ADAMS仿真任务时,也时常遭遇频繁的求解失败。
是什么原因让日常生活中无处不在的接触和摩擦在 CAE分析中变成了一个麻烦制造者。
本文将试图从理论与实际相结合的角度阐述ADAMS中接触和接触摩擦的作用机制及造成求解困难的原因,并给出改善接触求解困难的一些建议。
在ADAMS中,当两个分离的表面互相碰触并互切时,就称它们处于接触状态。
在一般的物理意义中,处于接触状态的表面有下列特点:·不互相穿透;·能够传递法向压力和切向摩擦力;·通常不传递法向拉力。
(因此,它们相互间可以自由地分开并远离)。
接触由如图1所示三种状态。
在ADAMS中分别表述为Open,Closed and Stick,Closed and Slide。
接触具有强烈的非线性、非保守特性。
随着接触状态的改变,接触表面的法向和切向刚度都有显著的变化。
刚度方面大的突变通常会导致严重的收敛困难,特别是当存在滑动时。
大多数的接触问题还需要同时考虑摩擦,摩擦计算同样Adams/Solver有两个几何引擎用来检测三维接触,分别是Parasolid和RAPID。
ADAMS在汽车动力学仿真中的应用研究

ADAMS在汽车动⼒学仿真中的应⽤研究ADAMS在汽车动⼒学仿真中的应⽤研究newmaker⼀、引⾔数字化虚拟样机技术是缩短车辆研发周期、降低开发成本、提⾼产品设计和制造质量的重要途径。
随着虚拟产品开发、虚拟制造技术的逐渐成熟,计算机仿真技术得到⼤量应⽤。
系统动⼒学仿真是数字化虚拟样机的核⼼、关键技术。
对汽车⽽⾔,车辆动⼒学性能尤为重要。
为了降低产品开发风险,在样车制造出之前,利⽤数字化样机对车辆的动⼒学性能进⾏计算机仿真,并优化其参数就显得⼗分必要了。
对操纵稳定性的研究常采⽤仿真分析⽅法和试验⽅法来进⾏。
仿真分析是在计算机上建⽴简化到⼀定程度的模型,输⼊驾驶员对汽车的各种操纵信号,解算出系统的时域响应和频域响应,以此来表征汽车的操纵稳定性能。
因为仿真分析花费时间短,可在计算机上重复进⾏,对各种设计⽅案进⾏快速优化对⽐,并且可实现试验条件下不能进⾏的严酷⼯况分析,因此该⽅法⽇益被⼈们采⽤。
建⽴整车仿真模型常有多种⽅法,笔者应⽤机械系统运动学、动⼒学仿真分析软件ADAMS,来建⽴仿真模型,并对不同⽅向盘转⾓下的操纵稳定性进⾏了动⼒学仿真。
⼆、数字化分析模型的准备(⼀)仿真分析模型所需要的参数类型建⽴多体系统动⼒学分析模型,参数需要量⼤,精度要求⾼,参数准备⼯作量⼤。
所需的参数主要可划分为四类:尺⼨(⼏何定位)参数、质量特性参数(质量、质⼼与转动惯量等)、⼒学特性参数(刚度、阻尼等特性)与外界参数(道路谱等)。
其中的尺⼨参数和⼤部分的质量特性参数可以通过建⽴三维数字模型得到,其他参数尚需要别的参数获得⼿段来获取。
总的来说,参数的获得⽅法主要有以下⼏种:图纸查阅法、试验法、计算法、CAD建模法等。
可根据具体实际情况采⽤。
(⼆)数字模型间的数据传递基于CAD/CAM软件建⽴三维数字模型是建⽴数字化分析模型的基础。
使⽤CAD/CAM软件建⽴系统的三维实体数字模型,并以各个运动部件的形式先将零部件合并,装配好;将模型存为ADAMS软件可调⽤的特定格式的数据⽂件;然后利⽤CAD/CAM软件与ADAMS 软件之间的数据接⼝⽂件将三维模型传递到ADAMS软件中去;之后输⼊各运动部件的密度等必要参数,就可以直接得到各运动部件的质量、质⼼与转动惯量等质量参数。
ADAMS中的接触和接触摩擦作用机制实例详解

测 试 试 验
A U TO MO B I L E AP PL I ED T EC } { N0 L0 GY
2 0 I 7 年 第6 辫
20 l 7 N0.6
1 0 . 1 6 6 3 8 / j . c n k i . 1 6 7 1 — 7 9 8 8 . 2 0 1 7 . 0 6 . 0 2 0
分 开并 远 离 ) 。
析中变成了一 个麻烦制造者 。本文将试 图从理论 与实际相结
合 的 角度 阐述 AD AMS中接 触 和 接 触 摩 擦 的作 用 机 制 及造 成
求解困难的原因,并给 出改善接触求解 困难 的一 建议。
1 、 什 么 是 接 触
在A DA MS中,当两 个分离 的表面互相碰触 并互切时, 就称 它们处于接触状态 。在一般 的物理意 义中,处 于接 触状
A D AMS中的接触 和接触摩 擦作用机 制实例 详解
高一 佳
( 陕西保利特种车制造有 限公司,陕西 两安 7 1 0 2 0 0 ) 摘 要 :文章首先从理论上详细说 明了 A DAMS软件 中的接触 和接触 孽擦在 模掣中的作J { j 机制 。然后结 持 臂式 垃圾车动 力学 分析 实例 ,研 究了 备参数变动对接触造成的影响 。最后给 出了解 决接 触求解无法收敛 问题 的一 收原
G a o Y i j i a
( S h a a n x i Pl o y S p e c i a l V e h i c l e Ma n u f a c t ur i n g Co . , L TD. , S h a a n x i Xi ’ l f u 7 1 0 2 0 0)
Op e n ,C l o s e d a n d S t i c k ,C l o s e d a n d S l i d e 。接触具有强烈 的 非线性、非保守特性 。随 着接 触状 态的改变,接触表面的法 向和切向刚度都有显著的 变化 。刚度 方面大的突变通常 会导 致 严重 的收敛困难,特别是 当存在滑动 时。
61-基于ADAMS的碰撞仿真分析
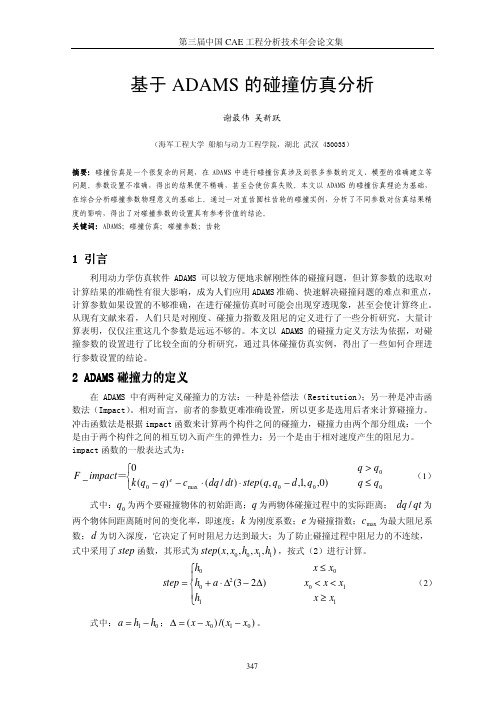
348
第三届中国 CAE 工程分析技术年会论文集
代中需要求解线性方程组,过大的迭代次数将导致累积误差的加人而产生错误的结果。默认 值为 10。 4、校正器(Corrector):ADAMS 中有两种校正器 Original 和 Modified。这两种校正器的 主要区别在于对迭代收敛的判定上,其中 Modified 校正器对收敛的判定比较宽松。系统默认 校正器是 Original。 5、积分多项式阶数(Kmax):在 ADAMS 中,用参数 Kmax 控制积分多项式的最大阶数,刚 性积分器中默认阶是 6。当系统包含非连续量的时候,若将积分阶设为 2( 1、2 阶向后差分多 项式可在任意步长上保证计算的稳定性)可以提高计算速度,因为这样避免了频繁的变阶计 算。
3.2 积分器、 积分器、积分格式与 积分格式与积分误差
1、积分器(Integrator)。ADAMS 中常用的刚性积分器有三种:GSTIFF、WSTIFF 与 BDF, 不同的刚性积分器,计算的效率和稳定性也有所不同,它们的计算稳定性关系为 BDF >WSTIFF [2] > GSTIFF,而数值计算效率关系为 GSTIFF >WSTIFF > BDF 。GSTIFF 是最常用的积分器,也 是系统默认的积分器。BDF 积分器虽然计算时间最长,但它有时可求解 GSTIFF 求解失败的问 题。 2、积分格式(Formulation)。ADAMS 提供了三种积分格式:I3、SI2 和 SI1。I3 格式求解 速度快,但精度太差;SI2 格式可以避免 Jacobian 矩阵的病态,而且考虑了约束方程,虽然 求解时间变长,但求解精度高;SI1 求解精度比 SI2 还高,但它计算量太大,一般不采用。 3、积分误差(Error)。积分误差决定了在求解动力学方程的过程中,某一步的预测值与 校正值之间所能接受的差值。积分误差过大,计算容易进行,但最终结果会产生过大误差; 积分误差过小,求解时间太长。一般来讲,积分误差设为 0.001 较为适宜。
基于仿真的粘滞阻尼系数对刚体接触力影响的分析
韬
' I
…
{
‘I
_
¨
‘
}
L土; -
一
{霄 1… * 麓{ £ } ; { - i . f { { }
{ 7 ; }
一
∞. 【 )
j
cc 】 瞳=05 8mm .N‘ /
Tme ) i ( s
图 4 球体与板体碰 撞的接触 力变化 曲线
当 = 时 , =c 然后保持不变。 c ~, 须通过齿轮 间的接触来完成 。 在分析过程中, 了避 为 L naai Nkaeh曾提 出确定 式( 中阻尼 免施加的负载发生突变 ,负载转矩的定义使用 s p akr 和 i vs n r 1 ) t e 单元 的最大阻尼系数 c 的方法阁 一 :
的接触碰撞。 小齿轮( 主动轮 ) 转动周期是 1 。 5 图 表 s 示 了当最 大阻 尼系 c 分别取 5 N・/ 5N・/ m、 一 O smm、 sm 0 ・/ m和 0 ・/ m时, .N sr 5 a N sm 而其他接触参数
K= 8 9 e+ 5 N/'l 2 q . d =O 0 .7 nn 3 =15, 。 l / . 1 mm ,
Cf r= a t () 7
函数平 缓施加 。模 型间的接触 定义 为实体 与实 体
(od Sf ) Sh — od 接触 。 i
式 () 被称 为滞 后 阻 尼 因子 , 7中 而且
‘ 3 ( e. =。 1 O - Байду номын сангаас r
: .
。
() 6 8 ,
在机械系统动力学仿真分析软件 A A S中 , DM 完 成对图 1 中模型的约束和载荷的添加,以及求解器的 设置和仿真控制。在最大阻尼系数 c 的取值分别为 ~
Adams中接触建模技巧
在Adams模型中定义了接触力的情况下,在建模和计算时需要考虑的很多因素,通过以下各个方面的使用技巧,可以帮助我们建立更容易收敛的模型及更准确的计算结果:步长在模型中定义有接触力的情况下,使用相对大的步长运行仿真将导致收敛问题使接触计算困难。
在积分步长内大的位移(特别是转动位移)会导致明显的不连续。
仿真时把hmax参数设置为相对小的值可以帮助一些模型通过限制预测产生的位移,从而使计算更容易收敛。
静平衡在包含有接触的模型中进行静平衡求解是非常困难的,使用好的建模技术比如如果预计对象在静平衡时是接触状态,那么确保对象在建模初始配置下也是接触状态。
如果不可行,那么对象与接触位置很接近,这样在静平衡迭代过程中可以更容易检测到接触。
使用合适的TLIM及ALIM求解参数设置也能限制扰动帮助找到静平衡位置。
如果很难找到静力平衡那么可以对模型使用动力平衡方法。
薄壳在一个求解步中,Adams会执行多个积分步来满足预测校正的要求,如果输入的几何厚度很薄,那就有可能出现一个几何完全穿透到另一个几何中,导致无效的交叉体积的计算。
这可以导致错过接触,穿或生成异常高的接触力。
减少hmax可以帮助防止这个问题。
摩擦摩擦的计算是高度非连续的,可能导致数值收敛问题,特别是在相对低速的状态下。
摩擦计算困难将加重已经困难的接触计算。
只要有可能首先运行模型不考虑接触的摩擦,运行成功后再考虑摩擦的影响。
如果附加的接触力导致数值计算困难或仿真速度缓慢。
那么可以尝试增加摩擦设置中的STICTION_TRANSITION_VELOCITY 和FRICTION_TRANSITION_VELOCITY参数,也可以减小摩擦系数,这都将有助于积分收敛。
复杂几何从几何生成器获取接触几何交集信息的时间直接与给定几何的复杂程度相关。
有些方法将几何限制,尽可能避免不必要的访问,但复杂的几何任然会很大程度影响仿真。
考虑预估接触几何对之间的实际接触区域,将跟据可能接触几何区域对几何体进行修剪或分割,接触定义时只引入分割后可能产生接触的几何体。
基于Adams进行复杂接触分析的等效方法
②2号哑物体与 1 号哑物体 之间建立横 向平动
副, 并 限位 设置 .
个 参数 ( 3 个 位 置参数 和 3个方 向参 数 ) 使其 与另一 个 关键 点相 符 , 这 样便 可实 现 约束生 效功 能 , 并 通过
动 态链 接库 调用 此程 序.
③3号 哑物体 与 2号哑 物体 之 间建立 法 向平 动
( J i a n g n a n D e s i g n a n d R e s e a r c h I n s t i t u t e o f Ma c h i n e r y a n d E l e c t r i c i t y , G u i y a n g 5 5 0 0 0 9 , C h i n a )
Ab s t r a c t :Ba s e d o n Ad a ms ,a l l e q u i v a l e n t me t h o d o f t h e c o mp l e x c o n t a c t a n a l y s i s i s p r o p o s e d by c o mb i n a t i o n s t ud y o f k i n e ma t i c p a i r s .A c a s e mo d e l i s s i mu l a t e d a n d t e s t e d a n d t he s i mu l a t i o n r e s u l t s a r e c o n s i s t e n t wi t h t h e t e s t r e s u l t s . T h e e q u i v a l e n t me t ho d f o r c o mp l e x c o n t a c t mo d e l a n a l y s i s i s mo r e a c c u r a c y,a n d i t h e l p s t o i mp r o v e t h e c lc a u l a t i o n e ic f i e n c y o f t h e mo d e 1 . Th e r e f o r e, t h e e q u i v a l e n t me t ho d c a n p r o v i d e i mp o r t a n t e n g i n e e r i n g r e f e r e nc e a n d e n g i n e e r i n g a p p l i c a t i o n v a l u e . Ke y wo r ds :c o n t a c t a n a l y s i s ;k i n e ma t i c p a i r ;Ad a ms
ADAMS仿真时发生接触穿透的原因及对策
’!( 分误差精度过低会影响求解的正确性 "
D’’’ N’’’ #’’’ 6’’’ %’’’ !’’’ &’’’ &>’ !>’ %>’ 6>’ #>’
时间 $ H$ % P&
!># !>’ &># &>’ ’># ’
-$./00 是最常用的积分器 ! 也是系统默认的积分器 !
它包括 =% #=& 和 ,=! 等形式 " 对于非连续问题的求解 !,=! 积分器的稳定性一般要比 =% 积分器好 ! 但是 ,=! 求解速
示棒料与滚筒的碰撞力大小 " 由图 % 可 知 ! 当 仿 真 步 数 取 &(( 和 #(( 时 均出现了穿透现象 " 其中 ! 步数取 &(( 时 ! 棒 料 与 滚 筒第 一 次 接 触 便 发 生 了 穿 透 $ 步 数 取 #(( 时 ! 棒料被刮板带起又落下时发生穿透 " 步数取 为 &((( 时 ! 始终未发生穿透 " 仿真步数的增大虽然有助于提高求 解稳 定 性 ! 但同时会增加系统的计算时间 ! 所以在实际 过程中需要综合考虑 " 适当增大仿真步数 !对仿 真会有一定帮助 "
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目前,ADAMS软件的应用越来越广泛,但是,运用ADAMS 软件来研究多接触问题的文献几乎难以找到,其原因正是它对多接触问题处理不力。
在ADAMS软件中,尽管可以定义各种二维或者三维的接触关系,但是求解往往是不成功的。
1多接触问题在ADAMS软件中的求解困难及可能原因ADAMS中多接触问题求解困难主要表现在:定义接触后,求解速度会突然比直接定义约束代替接触的模型慢很多;由于接触力跃变太大而产生数值困难,使仿真过程出错而停止;在仿真时间较长时会产生接触力突然消失、接触体互相穿透、就象没有定义接触的现象。
根据ADAMS中采用的接触判断准则和接触动力学模型[1],求解动力学方程组时,ADAMS求解器将接触力并入广义力矩阵中求解。
未发生接触前,每一次迭代都将预先判定接触是否发生,一旦接触发生,为了更精确计算接触力,动态地将迭代步长调整到比用户设定值小很多的值,并且在这些小步长迭代的过程中仍然继续判断有否其它接触发生,使求解速度大大降低。
该问题可选用效率高的算法来解决,如坐标分离法等。
对于产生数值困难的问题,一般通过正确的参数匹配加以解决,其中刚度的选取是关键,除依据材料特性和几何特性外,还应使求解过程中接触力不至于破坏构件间的约束关系。
此外,步长应尽量取得小。
接触力突然消失现象是ADAMS中多接触问题求解失败的最致命的原因,目前还缺乏针对该现象的解决办法,据笔者的亲身体会,认为产生这种现象可能有下面几方面原因:(1)参与接触的零部件结构过于复杂,使现有判断准则难以正确判断接触发生与否,从而产生穿透现象;(2)积累误差的影响;(3)如前所述,接触发生时步长变得很小,当仿真时间较长时,将产生很多中间结果,但ADAMS不象某些Ansys等软件那样能将中间结果自动存盘,而是驻留在计算机内存之中,只有等整个仿真过程结束且用户给出存盘指令后才将这些结果保存下来。
在这个过程中当大量的内存用于存放先前的结果后,后续结果不得不丢失,或引起动态刷新不正常,使与形体关联的sheII文件中的当前数据不正确,从而引起接触判断的失误。
经笔者长时间的摸索,采用分段仿真的办法可以根本解决接触突然消失的问题。
2基于ADAMS的分段仿真概念、例证和数据融合基于ADAMS的分段仿真[2]是指为解决ADAMS软件对多接触问题处理不力、尤其是发生接触力突然消失的问题,将需仿真的整个时间段分割成数个小的时间段分别进行仿真,从第二段开始的每一小段仿真的初始条件为上一段仿真的最后一步结果,最后将所有结果融合的仿真办法。
分段仿真和动力学中初值问题求解在原理上是一致的。
分段仿真的办法是调用ADAMS的Save命令和ReIoad命令,完成一段仿真时,用Save命令将当前的所有动力学参数值和系统变量存为一个文件,下一段仿真开始之初,用ReIoad命基于ADAMS的多接触问题研究石明全(华东交通大学机电工程学院,南昌330013)E-maiI:sha_ou1975@摘要目前运用的大多数动力学分析软件中,对接触问题的处理都不是很理想。
在ADAMS软件的最新版本中,尽管可以定义诸多接触形式,但是当接触约束目较多时,仿真过程中会出现接触体间互相穿透的现象,从而无法求解,目前运用ADAMS软件研究多接触问题的文献尚难以发现。
该文针对多接触求解在ADAMS中难以求解的问题,提出了基于ADAMS的分段仿真方法,运用该方法,可以在ADAMS平台上对多接触问题进行仿真研究。
关键词ADAMS多接触分段仿真法文章编号1002-8331-(2004)29-0220-03文献标识码A中图分类号TP319Study on Multi-contacts with ADAMSShi Mingguan(MechanicaI and EIectricaI SchooI of East China Jiaotong University,Nanchang330013)Abstract:MuIti-contacts is very difficuIt to be soIved in most CAE software.based on the Iast version of ADAMS,many forms of contact restriction can be defined,but when many contact restrictions are defined,the contact bodies are to penetrate through each other,and anaIysis comes to faiIing,then gets wrong simuIation resuIts.This paper focus on the soIving difficuIties,especiaIIy the penetrating phenomena between contact bodies.ln this paper,subsection simuIation based on ADAMS software is brought forward to soIve muIti-contacts probIem,and it is proved to be highIy effective.Keywords:ADAMS,muIti-contacts,subsection simuIation作者简介:石明全(1975-),副教授,主要从事机械动力学仿真和计算机辅助设计和制造方向的研究和教学工作。
2202004.29计算机工程与应用计算机工程与应用2004.29图4小球C 第二段仿真的X 方向位移、速度、加速度仿真t /(S )x /(mm )y /(mm )u x /(mm ・S -1)u y /(mm ・S -1)a x /(mm ・S -2)a y /(mm ・S -2)0.50140.1199-347.6896184.402322.8825-1044.0353-429.1524全段0.5141.7374-347.5058174.840418.7079-1174.945214.3008仿真0.811.3325-349.8151-260.4-8.987-289.058888.32331.0-37.3365-348.0114-179.552920.46031137.171518.04450.50140.1199-347.6896184.402322.8825-1044.0353-429.1524第二段0.5141.7374-347.5058174.840418.7079-1174.945214.3008仿真0.811.3325-349.8151-260.4-8.987-289.058888.32331.0-37.3365-348.0114-179.552920.46031137.171518.0445仿真碰撞开始时刻/(s )碰撞结束时刻/(s )最大碰撞力时刻/(s )最大碰撞力/(N )全段0.570.5740.5713567.9109第二段0.570.5740.5713567.9109令将该文件重新载入并作为当前段仿真的初始值,同时将每一段仿真的结果输出到一个结果文件,以便最后的数据融合。
显然,应用分段仿真办法必须解决两个问题,一是证明其可行性和结果的正确性;二是解决最后的数据融合问题。
ADAMS 软件采用第一类Lagrange 方程[3]建立系统的动力学模型,仿真理论无疑是正确的。
在此仅用实例说明分段仿真的结果和不分段的结果相比既不丢失数据,也不产生误差。
图1分段仿真例证模型设有如图1所示的模型,滑块A 可沿图示的x 方向滑动,其两端与地之间各连接一个无阻尼弹簧。
无重杆B 一端与小球C 固连,一端与滑块A 质心铰接,可绕铰点在xy 平面内转动,小球质心初速u 0。
小球C 分别与固定不动的块D 、块E 定义实体碰撞。
如总的仿真时间为1S ,分两段计算,将整个过程从0.5S 处分开,每段的其它求解条件一致。
第一段和第二段的语法[4]分别为:第一段:Simuiation /Dynamic Time=0.5,Step Size=1e-4Save /SyStem Fiie=d :/t050.Sav第二段:Reioad /SyStem Fiie=d :/t050.SavSimuiation /Dynamic Time=1.0,Step Size=1e-4列出全段仿真和分段仿真的部分结果见图2、图3、图4,表1,表2。
从图2~图4、表1、表2可以看出,在对应时段,分段仿真结果无论曲线变化规律还是动力学参量的数值都与全段仿真结果一致。
表1全段仿真和分段仿真结果对照:小球C 质心运动对照表表2分段仿真和全段仿真小球C 碰撞情况对照为直观反映整个过程系统的动力学特性,需将分段仿真的结果融合起来。
ADAMS 中,计算结果文件如图5所示。
其中,文件头包含仿真类型、坐标系和单位制等信息;物体编号块对系统每一个物体按名称编号;约束编号块对定义的每一个约束按名称和类型编号;力元编号对每个外力、弹簧力元和接触等按图2小球C 全段仿真的X 方向位移、速度、加速度图3小球C 第一段仿真的X 方向位移、速度、加速度2214结束语机构间的接触问题是动力学研究领域广泛关注的问题,除了接触理论还有待进一步发展外,对接触这一强“刚性”问题的求解也需要解决。
随着如ADAMS这样的大型CAE软件的广泛应用,使动态仿真成为现实,但是目前针对运用这样一些软件求解接触问题尤其是多接触问题的文献还非常少。
该文在长期探索的基础上,找到一条在ADAMS软件的现有版本及求解环境下求解多接触问题的途径,实践证明,采用分段仿真方法能够在ADAMS中成功地对多接触问题进行仿真求解,且由分段的任意性和表l、表2中所取时刻的任意性,可以得出结论:基于ADAMS的分段仿真是切实可行,可在工程上运用。
(收稿日期:2004年2月)参考文献l.G M L Gladwell著.范天佑译.经典弹性理论中的接触问题[M].北京:北京理工大学出版社,l99l2.石明全.某火炮自动供输弹系统和全炮耦合的发射动力学研究[D].博士学位论文.南京:南京理工大学,2003-06:30~393.洪嘉振.计算多体系统动力学[N].北京:高等教育出版社,l999er Reference Manual version l2.0[M].MDI,2000名称编号;所有的编号唯一而不重复。
初始条件块中按编号对应的原则记录每个物体、约束或力元的初始值。
每一数据块包含一步迭代的当前时刻和数据结果,记录该时刻所有参量的当前值,依次按位移、速度、加速度、约束、力的顺序排列,并且每一行都对应一个模型定义时的编号。