adams接触
adams中接触力参数

在ADAMS(Automatic Dynamic Analysis of Mechanical Systems)中,接触力参数的设置对于模拟接触行为和计算接触力至关重要。
以下是一些常见的接触力参数:1. 接触类型:二维(2D)接触:适用于平面几何形状之间的接触,如圆弧、曲线和点。
三维(3D)接触:适用于实体之间的接触,如球、圆柱、封闭的shell、拉伸体和旋转体。
2. 接触算法:基于回归的接触算法(Restitution-base contact):通过惩罚参数与回归系数计算接触力,考虑能量损失和恢复系数。
基于碰撞函数的接触算法(IMPACT-Function-based contact):使用ADAMS函数库中的IMPACT函数来计算接触力。
3. 接触参数:刚度(Stiffness):描述接触面抵抗变形的能力,单位通常为N/m或N/mm。
力指数(Force Exponent):影响接触力随位移变化的曲线形状,通常取值在1.1~1.5之间。
最大阻尼系数(Damping):控制接触过程中能量耗散的速度,单位通常为N·s/m。
穿透深度(Penetration Depth):允许接触体在没有产生接触力的情况下相互穿透的最大距离,单位通常为m。
静摩擦系数(Static Friction Coefficient):描述接触面在相对静止时阻止滑动的阻力。
动摩擦系数(Kinetic Friction Coefficient):描述接触面在相对运动时阻止滑动的阻力。
4. 材料相关参数:材料stiffness 和damping:这些参数取决于具体材料的物理特性,例如钢(Steel)在干燥或润滑条件下的刚度和阻尼系数。
在设置这些参数时,需要根据实际的机械系统和材料特性进行调整,以确保模拟结果的准确性和可靠性。
虚拟样机详述Adams中接触的定义
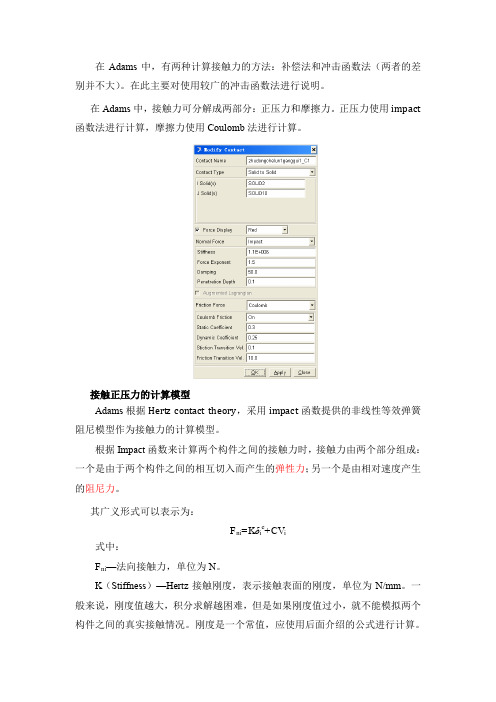
在Adams中,有两种计算接触力的方法:补偿法和冲击函数法(两者的差别并不大)。
在此主要对使用较广的冲击函数法进行说明。
在Adams中,接触力可分解成两部分:正压力和摩擦力。
正压力使用impact 函数法进行计算,摩擦力使用Coulomb法进行计算。
接触正压力的计算模型Adams根据Hertz contact theory,采用impact函数提供的非线性等效弹簧阻尼模型作为接触力的计算模型。
根据Impact函数来计算两个构件之间的接触力时,接触力由两个部分组成:一个是由于两个构件之间的相互切入而产生的弹性力;另一个是由相对速度产生的阻尼力。
其广义形式可以表示为:F ni=Kδi e+CV i式中:F ni—法向接触力,单位为N。
K(Stiffness)—Hertz接触刚度,表示接触表面的刚度,单位为N/mm。
一般来说,刚度值越大,积分求解越困难,但是如果刚度值过小,就不能模拟两个构件之间的真实接触情况。
刚度是一个常值,应使用后面介绍的公式进行计算。
δi(Penetration Depth)—接触点的法向穿透深度,单位为mm。
注意:接触定义界面中输入的是阻尼达到最大值时的穿透深度(由碰撞动力学模型可知,两物体接触后,阻尼很快就达到最大值,且在接触过程中保持不变,因此,此时输入的穿透深度的取值应该越小越好。
同时考虑到ADAMS中的数值收敛性,一般可采用ADAMS中推荐的取值0.01 mm),并不是最大穿透深度(阻尼达到最大值后,构件之间的相互切入还可以继续)。
当接触点的法向穿透深度小于其临界值(接触定义界面中的输入值)时,阻尼系数是穿透深度的三次函数,当大于等于临界值时,阻尼值也到达其最大值,如下图所示。
e(Force Exponent)—力的指数,刚度项的贡献因子。
对于刚度比较大的接触,e>1,否则e<1。
对于金属常用1.3~1.5,对于橡胶可取2甚至3。
一般用1.5。
C(Damping)—阻尼系数,单位为N*sec/mm。
adams中接触力参数
adams中接触力参数在物理学中,Adams是一种多体动力学仿真软件,用于模拟多个刚体或弹性体在接触、碰撞、运动等物理过程中的相互作用。
在Adams中,接触力参数是模拟中一个重要的因素,它描述了接触物体之间的力学特性和行为。
下面是一些与Adams中接触力参数相关的参考内容:1. 接触力模型:在Adams中,可以选择不同的接触力模型来模拟物体之间的接触力。
常见的模型包括弹簧-阻尼模型、Hertz接触模型和Coulomb摩擦模型等。
在模型中,接触力参数会影响弹簧的刚度、阻尼比、接触点的形变等,从而影响接触力的大小和性质。
2. 接触刚度:接触刚度是指两个接触物体之间的弹性变形程度对接触力的影响。
在Adams中,可以通过调整接触刚度参数来改变接触物体的刚度,从而影响接触力的大小和分布。
3. 接触阻尼:接触阻尼描述了接触物体之间的相对运动对接触力的影响。
在Adams中,可以通过增加接触阻尼参数来增加接触物体之间的摩擦力,从而影响接触力的大小和动态行为。
4. 接触刚度曲线:在某些情况下,接触物体之间的力学行为可能会随着加载和卸载的过程而变化。
在Adams中,可以通过定义接触刚度曲线来模拟这种行为。
曲线上的数据点会影响接触力的变化情况,进一步影响仿真结果。
5. 接触力分布:接触力分布描述了接触物体上各个接触点的力学行为。
在Adams中,可以通过调整接触力分布参数来指定接触点的位置和分布情况,从而影响接触力的大小和方向。
6. 摩擦力:在Adams中,可以通过设置接触表面之间的摩擦力参数来模拟接触物体之间的摩擦行为。
摩擦力参数包括静摩擦系数和动摩擦系数,分别描述了两个物体在静止和运动状态下的摩擦特性。
7. 接触冲击:在Adams中,接触物体之间的接触冲击是通过设定补偿、阻尼或初始速度等参数来模拟的。
这些参数会影响接触冲击的强度、持续时间、性质等。
以上是关于Adams中接触力参数的相关参考内容。
Adams作为一种强大的多体动力学仿真软件,提供了丰富的参数和选项,使得用户可以灵活地模拟和调整物体之间的接触力行为,以获得准确的仿真结果。
虚拟样机详述Adams中接触的定义
在Adams中,有两种计算接触力的方法:补偿法和冲击函数法(两者的差别并不大)。
在此主要对使用较广的冲击函数法进行说明。
在Adams中,接触力可分解成两部分:正压力和摩擦力。
正压力使用impact 函数法进行计算,摩擦力使用Coulomb法进行计算。
接触正压力的计算模型Adams根据Hertz contact theory,采用impact函数提供的非线性等效弹簧阻尼模型作为接触力的计算模型。
根据Impact函数来计算两个构件之间的接触力时,接触力由两个部分组成:一个是由于两个构件之间的相互切入而产生的弹性力;另一个是由相对速度产生的阻尼力。
其广义形式可以表示为:F ni=Kδi e+CV i式中:F ni—法向接触力,单位为N。
K(Stiffness)—Hertz接触刚度,表示接触表面的刚度,单位为N/mm。
一般来说,刚度值越大,积分求解越困难,但是如果刚度值过小,就不能模拟两个构件之间的真实接触情况。
刚度是一个常值,应使用后面介绍的公式进行计算。
δi(Penetration Depth)—接触点的法向穿透深度,单位为mm。
注意:接触定义界面中输入的是阻尼达到最大值时的穿透深度(由碰撞动力学模型可知,两物体接触后,阻尼很快就达到最大值,且在接触过程中保持不变,因此,此时输入的穿透深度的取值应该越小越好。
同时考虑到ADAMS中的数值收敛性,一般可采用ADAMS中推荐的取值0.01 mm),并不是最大穿透深度(阻尼达到最大值后,构件之间的相互切入还可以继续)。
当接触点的法向穿透深度小于其临界值(接触定义界面中的输入值)时,阻尼系数是穿透深度的三次函数,当大于等于临界值时,阻尼值也到达其最大值,如下图所示。
e(Force Exponent)—力的指数,刚度项的贡献因子。
对于刚度比较大的接触,e>1,否则e<1。
对于金属常用1.3~1.5,对于橡胶可取2甚至3。
一般用1.5。
C(Damping)—阻尼系数,单位为N*sec/mm。
ADAMS接触力

ADAMS 接触力ADAMS 中的接触力(contact force)可用来描述运动物体接触时的相互作用力。
在ADAMS 中有如下两类接触力:1) 二维(2D)接触:是指平面几何形体之间的相互作用(比如圆弧、曲线和点)。
2) 三维(3D)接触:是指实体之间的相互作用(比如球、圆柱、封闭的shell 、拉伸体和 旋转体)。
Contact force 运用两种不同的方法计算法向力:1)基于回归的接触算法(Restitution-base contact)。
ADAMS/Solver 用这种算法通过惩罚参数与回归系数计算接触力。
惩罚参数施加了单面约束,回归系数决定了接触时的能量损失。
2)基于碰撞函数的接触算法(IMPACT-Function-based contact)。
ADAMS/Solver 运用ADAMS 函数库中IMPACT 函数来计算接触力。
点击力库的按钮contact force ,弹出Create Contact 对话框,图1为对话框截取的部分内容:下面只对应用较广的IMPACT 型接触力的各参数作一说明,其参数如图1所示:1) Stiffness 指定材料刚度。
一般来说,刚度值越大,积分求解越困难。
2) Force Exponent 用来计算瞬时法向力中材料刚度项贡献值的指数。
通常取1.5或更 大。
其取值范围为Force Exponent 1≥,对于橡胶可取2甚至3;对于金属则常用1.3~1.5。
3) Damping 定义接触材料的阻尼属性。
取值范围为Damping 0≥,通常取刚度值的0.1~1﹪4)Penetration Depth 定义全阻尼(full damping)时的穿透值。
在零穿越值时,阻尼系数为零;ADAMS/Solver 运用三次STEP 函数求解这两点之间的阻尼系数。
其取值范围为Penetration Depth 0≥下例为某金属材料在不同单位下的参数设置Stiffness 100000N/mm 1e8N/mExponent 1.3~1.5 1.3~1.5Damping 10~100N ·s/mm 1e6 N ·s/mPenetration 0.1mm 1e-3m图2部分内容为选定库伦摩擦时的内容,其含义如下:1) Coulomb Friction 。
ADAMS接触力汇总

ADAMS 接触力ADAMS 中的接触力(contact force)可用来描述运动物体接触时的相互作用力。
在ADAMS 中有如下两类接触力:1) 二维(2D)接触:是指平面几何形体之间的相互作用(比如圆弧、曲线和点)。
2) 三维(3D)接触:是指实体之间的相互作用(比如球、圆柱、封闭的shell 、拉伸体和 旋转体)。
Contact force 运用两种不同的方法计算法向力:1)基于回归的接触算法(Restitution-base contact)。
ADAMS/Solver 用这种算法通过惩罚参数与回归系数计算接触力。
惩罚参数施加了单面约束,回归系数决定了接触时的能量损失。
2)基于碰撞函数的接触算法(IMPACT-Function-based contact)。
ADAMS/Solver 运用ADAMS 函数库中IMPACT 函数来计算接触力。
点击力库的按钮contact force ,弹出Create Contact 对话框,图1为对话框截取的部分内容:下面只对应用较广的IMPACT 型接触力的各参数作一说明,其参数如图1所示:1) Stiffness 指定材料刚度。
一般来说,刚度值越大,积分求解越困难。
2) Force Exponent 用来计算瞬时法向力中材料刚度项贡献值的指数。
通常取1.5或更 大。
其取值范围为Force Exponent 1≥,对于橡胶可取2甚至3;对于金属则常用1.3~1.5。
3) Damping 定义接触材料的阻尼属性。
取值范围为Damping 0≥,通常取刚度值的0.1~1﹪4)Penetration Depth 定义全阻尼(full damping)时的穿透值。
在零穿越值时,阻尼系数为零;ADAMS/Solver 运用三次STEP 函数求解这两点之间的阻尼系数。
其取值范围为Penetration Depth 0≥下例为某金属材料在不同单位下的参数设置Stiffness 100000N/mm 1e8N/mExponent 1.3~1.5 1.3~1.5Damping 10~100N ·s/mm 1e6 N ·s/mPenetration 0.1mm 1e-3m图2部分内容为选定库伦摩擦时的内容,其含义如下:1) Coulomb Friction 。
ADAMS中接触的定义及参数设置

ADAMS中接触的定义及参数设置一、接触的定义接触力类型1)二维(2D)接触:是指平面几何形体之间的相互作用(比如圆弧、曲线和点)。
2)三维(3D)接触:是指实体之间的相互作用(比如球、圆柱、封闭的shell、拉伸体和旋转体)。
接触力的计算方法1)基于回归的接触算法(Restitution-base contact)。
ADAMS/Solver 用这种算法通过惩罚参数与回归系数计算接触力。
惩罚参数施加了单面约束,回归系数决定了接触时的能量损失。
2)基于碰撞函数的接触算法(IMPACT-Function-based contact)。
ADAMS/Solver 运用ADAMS 函数库中IMPACT 函数来计算接触力。
接触碰撞模型碰撞函数的理论计算公式xC d x step x k contactF e⨯-∆⨯=),,0,0,()( contactF 为接触力;△x :两碰撞物体的挤压变形;d 为渗入深度; 接触参数说明1)Stiffness 指定材料刚度。
一般来说,刚度值越大,积分求解越困难。
2)Force Exponent 用来计算瞬时法向力中材料刚度项贡献值的指数。
≥,对于橡胶可取2通常取1.5或更大。
其取值范围为Force Exponent1甚至3;对于金属则常用1.3~1.5。
≥,通3) Damping定义接触材料的阻尼属性。
取值范围为Damping0常取刚度值的0.1~1﹪4)Penetration Depth定义全阻尼(full damping)时的穿透值。
在零穿越值时,阻尼系数为零;ADAMS/Solver运用三次STEP函数求解这两点之间的阻尼系数。
其取值范围为Penetration Depth≥0;刚度:K越大,两物体渗透的量越小;指数:e越大,两物体渗透的量越大,因为渗透量是小数;阻尼:C越大,渗透量曲线越平滑,碰撞力曲线越平滑;渗透量:§,当实际渗透量大于§时,阻尼值开始完全起作用接触刚度由hertz 理论计算Reference:H.M. Lankarani and P.E. Nikravesh, “Continuous Contact Force 2,1,1)(34k 5.1n 22/1212121=-=⎥⎦⎤⎢⎣⎡++==i E h R R R R h h i i i πνπimpactprior to rate gap gap n restitutio of t coefficien 4)1(k 3n 2===-=--δδδδ e e DModels for Impact Analysis in Multibody Systems”, Nonlinear Dynamics, 5: 193-207, 1994.不同指数的影响:指数影响刚度(斜率)指数影响接触力变化的连续性:各种材料接触碰撞参数推荐值:库伦摩擦特性及参数定义仿真时发生接触穿透现象发生穿透的原因:模型结构:参与接触的零部件结构过于复杂,使得现有判断准则难以正确判断接触是否发生;仿真步长的设置:求解动力学方程组时将接触力并入广义矩阵中求解。
adams接触刚度系数 -回复
adams接触刚度系数-回复什么是adams接触刚度系数?Adams接触刚度系数是一种用于评估接触面之间刚度的指标。
它是指在两个接触面之间施加的力与产生的位移之间的比例关系。
Adams接触刚度系数可用于各种工程和科学应用中,比如机械力学、材料科学、地质学等领域。
在接触力分析中,接触刚度系数是一个重要的参数,能够帮助工程师优化设计和改善系统性能。
接触刚度系数的计算方法要计算Adams接触刚度系数,需要先测量或估计两个接触面之间的力和位移。
首先,通过施加一个已知的力并测量相应的位移,可以得到一组数据点。
然后,根据这些数据点,可以使用线性回归或其他数学方法来找到力与位移之间的线性关系。
接着,通过该线性关系中的斜率确定接触刚度系数。
接触刚度系数通常以单位力施加在单位位移上的力学刚度来表示。
在实际应用中,计算接触刚度系数可能会涉及复杂的力和位移测量。
例如,在机械接触中,使用传感器测量接触点处的力和位移。
然而,如果接触面的刚度随时间变化,则需要通过连续测量力和位移来获得准确的数据。
另外,接触刚度系数也可以通过有限元分析、实验测试和数值模拟等方法来计算。
Adams接触刚度系数的影响因素接触刚度系数可能会受到多种因素的影响。
首先,接触面的材料和几何形状可以影响刚度系数。
如果接触面是弹性材料,接触刚度系数通常比刚性材料小。
此外,接触面的形状和大小也会对刚度系数产生影响。
较大的接触面积通常会导致较大的刚度系数。
其次,加载条件也可能会影响接触刚度系数。
在静态加载下,接触刚度系数通常是常数。
然而,在动态加载或振动条件下,接触刚度系数可能会随时间变化,特别是当接触面之间存在间隙和滑动时。
最后,表面处理和润滑也会对接触刚度系数产生影响。
如果接触面进行了粗糙度处理,可以增加接触刚度系数。
另外,润滑剂的使用可以减小接触刚度系数,因为润滑减少了接触点之间的摩擦。
应用实例和未来发展Adams接触刚度系数在工程实践中有着广泛的应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Todd McDevitt, Ph.D., P.E.
July 25, 2000
Problem Description
F
(1)
Rigid Body 1
Rigid Body 2
(1) c ( 2) c
r
(1)
r
r F
M ( 2)
r
( 2)
M (1)
F
kn
kn
Rigid Body 2
c max
c
c
d
kn g
n
viscous ห้องสมุดไป่ตู้amping contribution
k(x 1 x) n STEP(x, x 1 d, c max , x1 ,0) * x IMPACT= 0
: x x1 : x x1
IMPACT Function
Define contact force parameters.
Define normal and frictional force parameters.
Workshop: Pawl to Gear Tooth Contact
Create surrogate spline
Access Geometric Modeling panel.
Workshop: Pawl to Gear Tooth Contact
You are viewing the gear tooth - parking pawl interface The model is complete except for a curve-to-curve unilateral contact constraint between the RED gear tooth and the parking pawl. YOUR TASK: create this missing contact constraint.
The IMPACT function allows the analyst to introduce a local, 1D deformable continuum model at the contact interface.
Consider the Hertzian solution for two contacting spheres:
Workshop: Pawl to Gear Tooth Contact
Start ADAMS/VIEW.
At the UNIX prompt:
• •
cd ppm
adams101 -c aview ru-s i e
Read in command file.
Click Import a file; then click OK.
no penetration compressive normal contact force no penetration, no force
persistency condition
g
FN
Unilateral Normal Contact Constraints
IDEA: variational inequality
g (t ) min x (1) ( , t ) x ( 2 ) ( , t )
Contact basis n (1) outward normal
x (1) t (1) t ( 2 ) Fc Fn n (1) Ft t (1)
Define contact force parameters.
Define normal and frictional force parameters.
Workshop: Pawl to Gear Tooth Contact
Objective:
Introduce the mechanics of creating contact constraints in ADAMS/VIEW.
From the File Import dialog box,
• • •
enter ppm.cmd in the File to Read field check the Update Screen box uncheck the Display Model Upon Completion box
Penalty Regularization
Introduce the scalar quantity kn .
Fn k n g
As k n , the constraint error 0.
kn
g
Fn
constraint error
IMPACT Function
k n
Rigid Body 1
(1) c
( 2) c
EOM m (i )(i ) F (i ) Fc(i ) r (i ) (i ) H (i ) M (i ) r (i ) F (i ) rc Fc
r t 0 ro r t 0 v o
t [0, T ]
from the cascading menus.
Workshop: Pawl to Gear Tooth Contact
Edit spline control points
Click on Click on
to access point Location Table. and select file bspline_t8.dat.
•
Build -> Bodies/Geometries
Select the Spline tool
.
Add a closed spline to an existing part.
• • •
Pick the body: gear. Pick 8 arbitrary points with the left mouse button. Create (end) with right mouse button.
Edit spline
Click on
to recalculate segments.
Change reference marker to .park.gear.MAR4197223. Click on OK in the Modify Geometric Spline panel.
Workshop: Pawl to Gear Tooth Contact
Edit spline
Access Modify Geometric Spline panel.
• •
Right click on surrogate spline. Select Bspline: GCURVE_27471 -> Modify
Concluding Remarks
3 Steps to Automatic Contact Constraints
Define geometry.
points, curves, circles, planes, spheres
Define contact force element.
Select type of contact manifold, i.e, plane, curve, etc. Identify contact manifolds. Verify outward normals.
c
c
Outline
Introduction & Motivation
Theoretical Background Contact Modeling in ADAMS/VIEW
Workshop: Pawl to Gear Tooth Contact
Friction Numerical Issues & Debugging Contact Models
t [0, T ]
F ( 2)
Fc(1) Fc( 2) Fc
Plus unilateral contact conditions
Contact Kinematics
R3 O
Rigid Body 1
x
(1)
x
( 2)
Rigid Body 2
g
n(1)
t (1)
Gap function g (t ) signg (t ) g (t ) , where
3 Steps to Automatic Contact Constraints
Define geometry.
points, curves, circles, planes, spheres
Define contact force element.
Select type of contact manifold, i.e, plane, curve, etc. Identify contact manifolds. Verify outward normals.
k(x 1 x) n
n>1 n=1 n<1
k
unfriendly derivative
working range
1
(x 1 x)
: x x1 : x x1
k(x 1 x) n STEP(x, x 1 d, c max , x1 ,0) * x IMPACT= 0