基于ADAMS的五自由度机械手运动学仿真
基于ADAMS的多关节机械手手抓部分的运动学仿真研究

的多关节机械手手抓部分的其中,nh是约束方程的个数;nc是广义坐标数。
于是可以得到系统速度的约束方程:(4)。
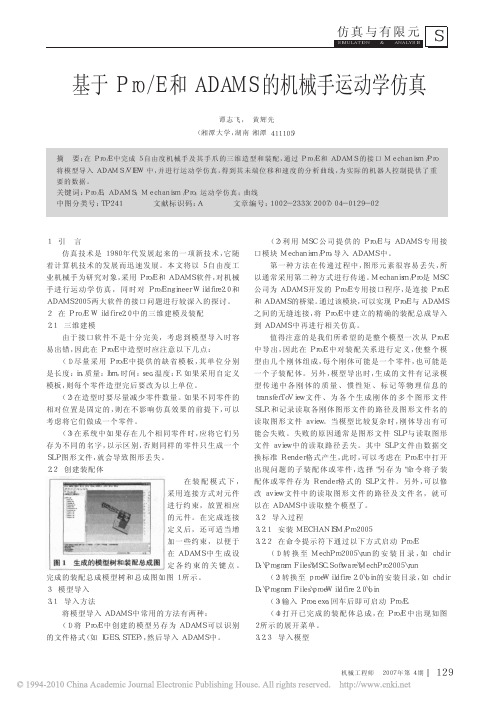
任意时刻t的速度,加速度可以由线性方程的数值方法求解,在ADAMS中通常采用图1 机械手三维装配三维模型的建立虚拟样机的三维模型的建立采用Solid完成,主要包括手抓、底座、大臂机构、小臂机构等,底座上有一电动机带动,实现大臂的转动。
大臂及其小臂的活动主要由液压缸带动,本文重点介绍机械手手抓部分的运动学分析,图2是机械手的三维装配图。
图2 手抓部分装配图立模型过程中遵循的原则。
建立模型之后,导入ADAMS化处理,在满足虚拟样机仿三维模型的建立要尽可能地数量应该尽可能的少,只保留基本的运动部件。
(2)机械手的结构及其分析。
本机械手实现的运动是平均每分钟抓取4次,旋转的角度是是机械手的机构运动简图,电动机带动齿轮转动,实现底座的转动,抓取物料时,由手抓图3 机械手机构运动简图机械手手抓的模型简化及其导入ADAMS中遵循模型的简化原则,将手抓的三维模型简化,模型建立部分使用Solid Edge ST5实现,ADAMA/View提供的Parasolid模型数据交换接口,将模ADAMS软件中。
导入后为模型的每个零件重命名和添加材料属性(steel)。
鉴于本文只研究机械手手抓部分的运动,故将删除了模型中与小臂链接的链接底座、前后缸盖以及套筒等的结构,完成简化后,为了使各个相对运动的部分形成有机的整体,根据构件之间相对运动,在模型中的利用ADAMS/View中的约束工具为各个构件之间引入约束。
图为导入ADAMS后的模型图。
图4 手抓简化仿真模型机械手手抓部分的仿真 机械手的手抓部分是机械手设计的重要部分,也是实现机械工作的必要条件,设计的目的是机械手每分钟中国设备工程 2024.04(下)图5 机械手手抓部分约束的添加机械手的整个驱动部分选用气压驱动,其中包括大小臂的运动以及手抓的张合,液压驱动最大优点是单位质量输出功率大,因为液压传动的动力元件可以达到很高的工作压力,在同等输出功率下具有体积小、质量轻、运动惯性小、动态性能好的特点。
基于Pro_E和ADAMS的机械手运动学仿真
点 击 Output Type 时 , 出 现 下 一 级 菜 单 , 有 两 种 格 式
Render 和 SLA 可 供 选 择 。
Render 包 含 Pro/E 中 模 型
定义的颜色等信息, 而
SLA 采 用 三 角 化 多 边 形 表
示 Pro/E 模 型表 面 , 没 有 颜
色信息。在本文中选用
图 5 未端位移和速度图 5总结
通过使用接口 软 件 Mechanism/Pro2005, 能 在 Pro/E 中完成零件的三维造型和装配后, 再将模型导入 ADAMS 中, 从而克服了 ADAMS 三维造型能力差的缺点。三维装 配模型导入 ADAMS 中后, 能很好地对机械 手 进行 运 动 学的分析, 能直观地观察到机器人的末端位移和速度。另 外, 也 可 以 对 机 械 手 进 行 静 力 学 、动 力 学等 方 面 的 分 析 , 观察其工作姿态, 判断其运动方案的合理性, 为对机器人 的 其 它 控 制 打 下 基 础 。此 技 术 同 样 可 应 用 到 工 程 机 械 、航 天航空业、国防工业及机械制造业等众多相关领域, 能大 大简化产品开发过程, 缩短开发周期, 减少开发费用和成 本, 提高产品质量。
[ 参考文献] [ 1] 詹 友 刚.Pro/ENGINEER 中 文 野 火 版 教 程 : 通 用 模 块[ M] .北 京 :
清华大学出版社, 2003. [ 2] 郑凯.ADAMS 2005 机械设计高级应用 实例[ M] .北京:机械 工业
出版社, 2006. [ 3] 郑 建 荣.ADAMS— ——虚 拟 样 机 技 术 入 门 与 提 高[ M] .北 京:机 械
工业出版社, 2001. [ 4] 方 建 军. 机 械 动 态 仿 真 与 工 程 分 析- - Pro/ENGINEER Wildfire
基于MATLAB五自由度机械手运动学仿真分析

基于MATLAB五自由度机械手运动学仿真分析五自由度机械手是一种具有五个独立自由度的机械装置,可以实现复杂的姿态和路径规划。
为了研究其运动学特性,可以使用MATLAB进行仿真分析。
本文将基于MATLAB对五自由度机械手的运动学进行仿真分析,包括直接运动学和逆运动学。
首先,我们需要定义机械手的结构和参数。
五自由度机械手通常由五个关节连接而成,每个关节的旋转角度可以通过电机控制。
我们可以使用DH参数建立机械手的运动学模型,在MATLAB中定义每个关节的DH参数。
DH参数包括关节的长度、偏移、旋转角度和连接方式等。
在定义了机械手的结构和参数之后,我们可以进行直接运动学分析。
直接运动学是指根据机械手的关节角度计算末端执行器的位置和姿态。
在MATLAB中,可以使用正运动学算法根据给定的关节角度计算末端执行器的位置和姿态。
这个过程可以通过建立运动学模型和坐标变换矩阵实现,在MATLAB中可以使用符号计算工具箱对模型进行符号计算,得到末端执行器的位置和姿态的闭式解。
接下来,我们可以进行逆运动学分析。
逆运动学是指根据机械手的末端执行器位置和姿态计算关节角度。
在MATLAB中,可以使用逆运动学算法根据给定的末端执行器的位置和姿态计算关节角度。
这个过程通常需要使用数值方法进行迭代求解,MATLAB提供了多种数值求解方法,如牛顿法和Levenberg-Marquardt算法等。
我们可以使用这些算法对逆运动学进行求解,得到关节角度的解。
在进行仿真分析之前,我们还需要定义机械手的工作空间。
工作空间是机械手可以达到的位置和姿态的集合。
对于五自由度机械手,可以使用三维空间中的一个区域表示其工作空间。
在MATLAB中,可以定义一个三维空间的体积,在此体积内的点被认为是机械手的工作空间。
在MATLAB中进行仿真分析时,可以使用图形界面工具进行交互式仿真分析。
MATLAB提供了多种可视化和动画功能,可以实时显示机械手的运动过程和工作空间。
基于ADAMS的多自由度机器人汽车天窗检测运动学仿真
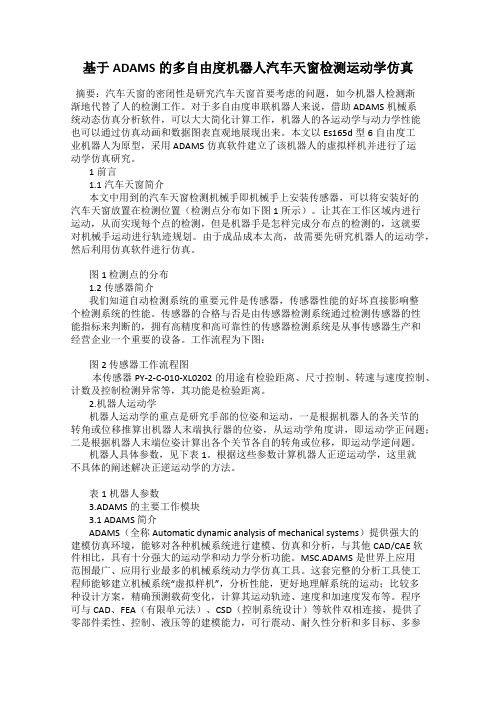
基于ADAMS的多自由度机器人汽车天窗检测运动学仿真摘要:汽车天窗的密闭性是研究汽车天窗首要考虑的问题,如今机器人检测渐渐地代替了人的检测工作。
对于多自由度串联机器人来说,借助ADAMS机械系统动态仿真分析软件,可以大大简化计算工作,机器人的各运动学与动力学性能也可以通过仿真动画和数据图表直观地展现出来。
本文以Es165d型6自由度工业机器人为原型,采用 ADAMS仿真软件建立了该机器人的虚拟样机并进行了运动学仿真研究。
1前言1.1汽车天窗简介本文中用到的汽车天窗检测机械手即机械手上安装传感器,可以将安装好的汽车天窗放置在检测位置(检测点分布如下图1所示)。
让其在工作区域内进行运动,从而实现每个点的检测,但是机器手是怎样完成分布点的检测的,这就要对机械手运动进行轨迹规划。
由于成品成本太高,故需要先研究机器人的运动学,然后利用仿真软件进行仿真。
图1 检测点的分布1.2 传感器简介我们知道自动检测系统的重要元件是传感器,传感器性能的好坏直接影响整个检测系统的性能。
传感器的合格与否是由传感器检测系统通过检测传感器的性能指标来判断的,拥有高精度和高可靠性的传感器检测系统是从事传感器生产和经营企业一个重要的设备。
工作流程为下图:图2 传感器工作流程图本传感器PY-2-C-010-XL0202的用途有检验距离、尺寸控制、转速与速度控制、计数及控制检测异常等,其功能是检验距离。
2.机器人运动学机器人运动学的重点是研究手部的位姿和运动,一是根据机器人的各关节的转角或位移推算出机器人末端执行器的位姿,从运动学角度讲,即运动学正问题;二是根据机器人末端位姿计算出各个关节各自的转角或位移,即运动学逆问题。
机器人具体参数,见下表1。
根据这些参数计算机器人正逆运动学,这里就不具体的阐述解决正逆运动学的方法。
表1机器人参数3.ADAMS的主要工作模块3.1 ADAMS 简介ADAMS(全称Automatic dynamic analysis of mechanical systems)提供强大的建模仿真环境,能够对各种机械系统进行建模、仿真和分析,与其他CAD/CAE 软件相比,具有十分强大的运动学和动力学分析功能。
五自由度机械手臂功能原理设计与仿真

1 引言目前在我国林果产业快速发展的同时,林果种植机械化水平较发达国家相比还很落后。
林果产业生产环节的修枝、植保、施肥、采摘等机械作业难题较突出。
其中果园喷施农药80%是依靠人力完成,剪枝机械化作业几乎为零,劳动强度非常大,而发达国家喷施农药机械化率已达95%,剪枝机械化作业率为100%,所以农民迫切需要解决林果生产环节机械化作业水平低、劳动强度大、人工作业成本高、作业质量差等问题。
国内在农业机器人方面的研究始于20 世纪90 年代中期, 相对于发达国家起步较晚。
但不少院校、研究所都在进行采摘机器人和智能农业机械相关的研究。
我国是一个农、林业大国,实现农林机械化生产的意义重大。
油茶树因其种子可榨油(茶油)供食用,故名油茶。
茶油色清味香,营养丰富,耐贮藏,是优质的食用油,也可作为润滑油、防锈油用于工业。
茶饼既是农药,又是肥料,可提高农田蓄水能力和防治稻田害虫。
果皮是提制栲胶的原料。
叶部含有花黄素、茶碱等,是医药工业的原料。
具有很高的经济效益。
目前油茶果树的采摘主要是依靠人力,这大大增加了果农的负担,而且人工采摘的效率低下,油茶果的采摘期大概有一个月左右,对于大面积种植油茶果树的果农来说,油茶果的采摘,就成了一个让人头疼的问题。
对于林果采摘机械手臂的研究不仅是和国际接轨的要求,更是国内市场的强烈需求。
本课题试图运用功能原理的求解方法,发散思维,创新结构设计,并通过计算机仿真软件对最终方案进行虚拟样机仿真研究,根据机械运动系统方案建立仿真用虚拟样机三维装配模型,仔细研究其约束条件、和初始输入数据,在成熟的虚拟样机系统中进行运动学和动力学仿真,检验方案的可行性,并查找方案的潜在问题加以修正,直到得到较满意的结果。
2 设计要求与计划2.1设计要求2.1.1 功能性要求机械臂要能够采摘树冠尺寸直径为3米,高3.5米以内的所有油茶树上的油茶果实(直径约 4.5cm),其运动要灵活自如,响应要快同时稳定性要好。
一种五自由度石材雕铣机器人的ADAMS仿真
一种五自由度石材雕铣机器人的ADAMS仿真一、背景简介石材雕刻制品需求量的增大和工业机器人的发展促成了雕铣机器人的产生和快速发展,本文借助adams对课题中初步设计的一种五自由度石材雕铣机器人进行仿真分析,旨在得出各关节的运动参数,为后续完善设计提供依据。
下面就分步进行介绍。
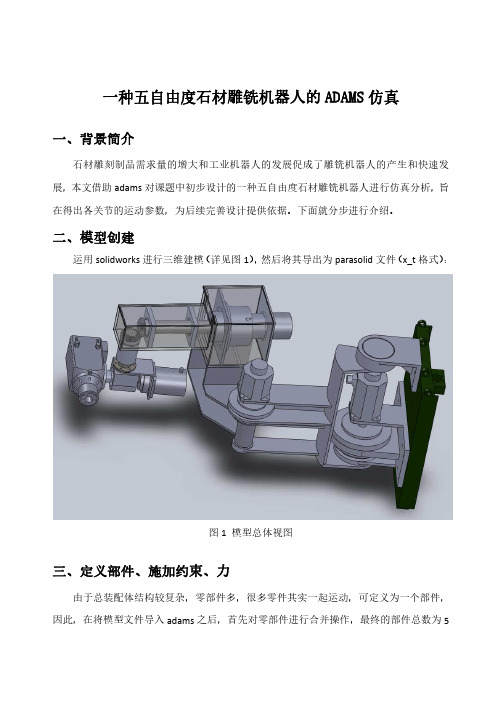
二、模型创建运用solidworks进行三维建模(详见图1),然后将其导出为parasolid文件(x_t格式):图1模型总体视图三、定义部件、施加约束、力由于总装配体结构较复杂,零部件多,很多零件其实一起运动,可定义为一个部件,因此,在将模型文件导入adams之后,首先对零部件进行合并操作,最终的部件总数为5个。
其次,定义各零部件材料,并添加约束。
在本设计中,将模型材料选择为钢质,这样adams可以自动计算各部件的质量和惯量等参数,末端执行器按产品说明书中的质量65kg 定义,模型共包括5个约束,其中4个旋转副,1个移动副。
系统共受1个集中力(2000N,施加在末端执行器处),1个扭矩(20.25Nm,施加在末端执行器处),以及1个变化的配重力,施加在臂架上,力的大小为Fpeizhong=Mg-Maz=1248.5*9.80665-1248.5*ACCZ(MARKER_12,ARKER_11,MARKER_11, MARKER_11)(其中M为配重质量,也就是以上各部件的质量的和,g为重力加速度,az 为臂架在z轴方向上的加速度)(参见图2、图3)。
图2模型定义图四、施加驱动、进行仿真系统在每个运动副约束上施加一个约束,采用正弦函数,施加驱动,详见表1:设置仿真步数620步,时间6.2s,进行仿真。
(详见图3)图3模型定义信息表1各关节驱动函数五、仿真结果仿真结束后,得到各关节的功率曲线,见图4至8。
图4升降台运动副功率变化曲线图关节号驱动函数移动关节(升降台)0.5*sin (time )关节290.0d *sin(38.0d*time)关节360.0d *sin(38.0d*time-90d)关节4100.0d *sin(103d*time+100d)关节5180.0d *sin(115.0d *time)图5关节2功率变化曲线图图6关节3功率变化曲线图图7关节4功率变化曲线图图8关节5功率变化曲线图六、总结通过本分析,得出了各关节的功率需求曲线,从而为电机选型提供了强有力的依据,为改进和完善设计具有很好的指导意义。
五自由度机械臂运动和控制仿真分析

五自由度机械臂运动和控制仿真分析一、本文概述随着机器人技术的快速发展,机械臂作为其中的重要组成部分,已在工业自动化、医疗、航空航天等领域得到广泛应用。
机械臂的运动和控制问题是机器人研究领域的核心问题之一。
本文旨在探讨五自由度机械臂的运动学和动力学模型,分析其运动特性,并在此基础上研究其控制策略,为机械臂的精确控制和优化提供理论支持。
文章首先介绍五自由度机械臂的基本结构和运动学原理,阐述其运动学模型的建立过程。
然后,通过拉格朗日方法或牛顿-欧拉方法建立机械臂的动力学模型,分析其在不同运动状态下的动力学特性。
接着,文章将研究机械臂的控制策略,包括位置控制、速度控制和力控制等,通过仿真实验验证控制策略的有效性。
文章将总结五自由度机械臂的运动和控制特性,并展望未来的研究方向。
本文的研究对于提高机械臂的运动精度、稳定性和效率具有重要意义,有望为机械臂在实际应用中的优化和升级提供理论指导和技术支持。
二、五自由度机械臂的结构与特点五自由度机械臂是一种高度灵活和复杂的机器人系统,其结构设计和特点决定了其在运动和控制方面的性能。
五自由度机械臂通常包括一个基座、一个旋转关节、两个或更多个移动关节以及一个末端执行器。
这种配置使得机械臂可以在三维空间中实现广泛的运动范围,从而满足各种复杂任务的需求。
结构设计:五自由度机械臂的结构设计通常遵循模块化原则,每个关节都由一个电机、减速器和传动机构组成。
基座关节负责机械臂的整体定位和姿态调整,而移动关节则负责实现末端执行器在三维空间中的精确移动。
这种结构设计使得机械臂具有较高的刚性和稳定性,同时也便于维护和升级。
灵活性:五自由度机械臂的灵活性是其最大的特点之一。
通过合理控制各个关节的运动,机械臂可以在复杂环境中实现精确的操作。
例如,在装配线上,五自由度机械臂可以准确地抓取和放置不同大小和形状的零件;在医疗领域,五自由度机械臂可以用于执行精细的手术操作。
控制精度:为了实现精确的运动控制,五自由度机械臂通常配备有高性能的控制系统。
基于ADAMS的五自由度焊接机械手运动学分析
设计提供 了参 考依 据。 关键 词 : 焊接机械手 ; D M ;五 自由度 ; 动学 分析 AAS 运
中图分 类号 :P 4 T2 1 D I1 .9 3 ji n 10 O :0 3 6/.s .07—14 2 1 .20 2 s 4 X.02 0 .1
焊 接机 械手 在高 质 、 高效 的焊 接生 产 中 , 发挥 了极 其 重 要 的 作用 , 它将 操 作 人 员从 繁重 、 调 、 单
第3 卷 第2 4 期
21年 4 02 月
武 汉理工 大学学报 ( 息与管理工 程版 ) 信
J U N LO T IF R A IN&M N G M N N IE RN ) O R A FWU ( O M TO N A A E E TE GN E IG
Vo . 4 No 2 13 .
图 2所示
 ̄WCa g) r 小臂∞ ) 手赡秆 4 手部沂5 ) )
五
一
编程计算, 可得出以 0 一 5 。0 为变量的运动学方程。
a P
。 T5 =
ay Py
() 3
a : P
0
1
中 : =CC 45一SS; =¥C 45 1 ; n 1 3C 2 1 v 12 C +C¥ 5 3 5
摘
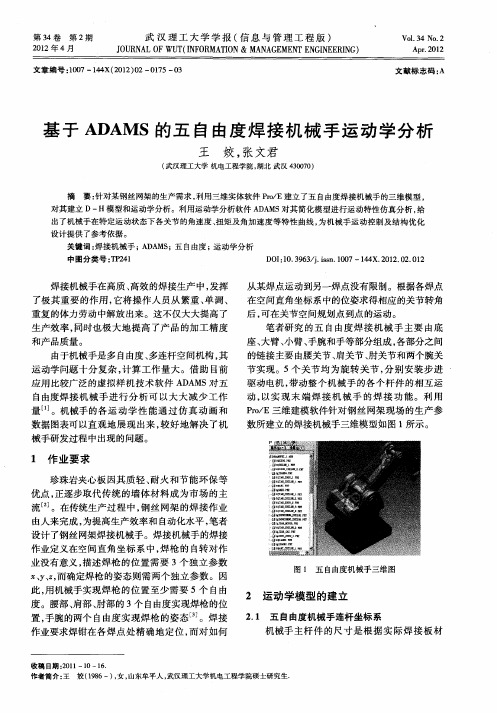
E建立了五 自由度焊接机械手 的三维模 型 , r/
对其 建立 D— H模型和运动学分析 。利用 运动学分析软件 A A S D M 对其 简化模 型进 行运动 特性仿真分 析 , 给
出了机械 手在 特定运动状态下各关节 的角速度 、 扭矩及角 加速度 等特性 曲线 , 为机械手 运动控制及结构 优化
重复的体力劳动中解放 出来 。这不仅大大提高了 生产效率 , 同时也极大地提高 了产品 的加工精度 和产 品质 量 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Abstract:In mis p印er throu曲establishing a Pm/E simulation model of a 5-Dof robot,and aIl ADAMS simulation model
model,c删ed which equal to me Pro/E
out me kinematics simulation of me mbot,men the皿oVement process of tlle robot is
中图分类号:TP241
文献标识码:A
文章编号:1006一0316ematics simulation of 5-Dof robot based on ADAMS
CA0 Chun—fang,KoNG Qing—zhong
(College of Mechanical Engineering,I彻er Mongolia Ulliversity of rIkhnology,HIlllhot 01∞51,China)
运动学仿真后,还可测出各个关节上的驱动力, 这里只给出腰关节的驱动力曲线图,如图8。
2.2仿真结果
图4、图5显示了机械手运动的过程。图4为
机械手仿真开始1 s后,腰关节转动90。,肩关节转
:
动45。,肘关节转动一90。后机械手的姿态;图5为
毫
机械手在第二秒滚转一90。,第三秒侧摆一135。的最
{
终姿态。可以看到,机械手的运动符合最初的设定。
(1)输入移动或旋转的速度。在默认情况下, 输入的转速单位为度,单位时间,输入的移动单位为 长度/单位时间。
(2)使用函数表达式。 (3)输入自编函数子程序的传的参数。还可以 编一个子程序定义非常复杂的运动,此时,在 参数栏输入的是传递给子程序的参数。本次仿真使 用的是第二种方法,输入函数。ADAMS提供了很
图l仿真计算流程
收稿日期:2007一08—24
万方数据 作者简介:曹春芳(1982一),女,硕士研究生,主要研究方向为机械手的运动学分析及仿真。
·72·
机器人技术
柳掰2007年第12期总第34卷
1模型建立
1.1利用Pro/E建立机构模型
图2即为在cAD软件Pro/E中所建立的机械手 机构模型。假设各杆件质量分布均匀,且为刚体。 图中可以清楚地看到该机械手由机座、腰部、大臂、 小臂、手腕以及夹持器几部分构成。其中腰部与机 座之间、大臂与腰部之间、小臂与大臂之间分别通 过旋转关节连接。此三个关节的作用是使与其连接 的杆件构成相对转动,即机械手的三个自由度,它 们决定了机械手末端在空间中的位置。机械手的腕 部有两个旋转关节连接,包含滚转和俯仰共两个自 由度,他们决定了机械手在空间中的姿态。机械手 的技术参数如表1所示。
重
誊
图6手部末端位移变化曲线图
图7手部末端速度变化曲线图
图4机械手运动过程1
图5机械手运动过程2
在仿真结束后,进行测量输出。ADAMs提供 了两种类型的测量,一种是预先定义好的自动输出 结果的测量,如:构件、点、柔性件、力、运动副 等对象的位移、速度和加速度、动能和势能、力等 有关信息。另一种是用户自定义的测量。ADAMs 的测量功能非常广泛,不仅可以在仿真分析过程中 跟踪绘制感兴趣的变量,以便跟踪了解仿真分析过 程,同时还可以在仿真分析结束后绘制有关变量的 变化曲线。
图3机械手约束信息
2 ADAMS仿真
2.1仿真设置
本次仿真主要观察在给定机械手五个关节角的 值后让机械手的末端达到一定位姿。要求机械手的 前三个关节先动,之后腕部关节再旋转调整姿态。 首先定义旋转副的运动,使各杆件按一定规律运动。 ADAMS定义的运动可以是与时间有关的位移、速 度和加速度,默认状态下运动的速度定义为常数。 我们可以通过三种方法自定义运动值:
图2机械手模型 表l机械手技术参数
该机械手可看作一个开式运动链,由连杆通过 转动关节串联而成。开链的一端固定在地面基座上, 另一端是自由的,安装着工具(或称为末端执行器), 用来完成各种作业。整个机械手的运动是由分别安 装在每个旋转关节上的步进电机驱动,经谐波减速 器减速后带动连杆转动。只要给定各个关节的角度 值,机械手就可以以一定姿态运动到指定位置。如 果给定机械手初态和末态位置坐标,也可以测出机 械手各关节角度值及其随时间的变化规律曲线。
万方数据
扔掰2007年第12期总第34卷
机器人技术
·73·
多函数,这里使用五个sTEP函数来定义五个旋转 副的运动。具体如下:
Motionjizuo—yao:step(time,0,0,1,90d) Motion—dabi—yao:step(time,0,0,1,45d) Motion3一xiaobi—dabi:step(time,0,O,1,一90d) Motion4一wanl—xiaobi:(time,1,0,2,-90d) Motion5一wan2一wanl:(time,2,O,3,一135d) 设定仿真时间为3 s,仿真步数为200,仿真。
祝耱2007年第12期总第34卷
机器人技术
·71·
基于ADAMS的五自由度机械手运动学仿真
曹春芳,孑L庆忠
(内蒙古工业大学机械学院,内蒙古呼和浩特010051)
摘要:利用三维实体建模软件Pro/E建立五自由度机械手的实体模型,并导入多体系统动力学仿真软件ADAMs中对其
关键诃:啪;ADAMs;机械手;运动学仿真 进行运动学仿真分析,使机械手整个运动过程直观化并对机械手的动力学分析及控制奠定了基础。
物理样机而言难以进行或根本无法进行的试验,直 到获得系统级的优化方案,缩短开发周期。
由于ADAMs的建模功能并不强大,只能建一 些简单的模型。所以本文先采用专业的cAD软件 Pro/E建立机械手的机构模型,然后通过 Mechallisnl/Pro接口模块导入ADAMs中进行运动 学仿真。整个仿真流程如图1所示。
在这里我们测量手部末端wAN3随时间的位移 变化,得图6所示曲线图。图6中可以清楚地看到 机械手臂全部位移大部分集中在第一秒内,也就是 说,要腰关节,肩关节,肘关节的旋转已经基本达 到所需位置。而腕部的滚转、俯仰两关节的作用是 对手部姿态做调整,位移的变化并不大。图7为机 械手末端速度变化曲线图,可以看到与实际情况是 非常吻合的。
2002
万方数据
1.2 ADAMS仿真模型等效转换
我们利用Pro/E与ADAMs软件的接口 MechanisⅡ1/Pm,将机构模型转入ADAMs中。由于 M,Pro和ADAMs来自两个不同的公司,两者间属
“有缝连接”,两者问不同的图形格式在转换时一 些图形元素可能会丢失,此时需要返回作相应的修 改,进一步完善模型。确保无误后添加约束及驱动。 对于本论文中的机械手主要包括固定副,关节的旋 转副及驱动。各部件的约束关系尽可能与实际系统 相一致,最终形成系统的虚拟样机。此时的样机包 含两部分,一部分为大地(固定件)模型,另一部 分为运动件模型。各关节的连接关系可以在ADAMS 的信息窗口中看到,如图3所示。接下来就可以进 行仿真分析了。
clearly visible.Which can be refered by me dynamics analysis aIld contml of me robot.
Key woI.ds:P艘;ADAMS;robof;垴nematjcs sjmulatjon
随着科学技术的发展,机械手已经广泛应用于 各个领域,将操作人员从繁重、单调、重复的体力 劳动中解放出来。特别是在高温、危险、有害的作 业环境(放射性、有毒气体、粉尘、易燃、易爆、 强噪声等)中,可用机械手代替人的部分操作。在 铸造、锻造、冲压、切削加工、喷漆、装配等各种 工艺过程中都已用到机械手。这不仅大大提高了生 产效率,同时也极大地提高了产品的加工精度和产 品质量,可以说工业机器人的应用对工业的发展起 到了巨大的推动作用。因此,对于机械手的分析研 究是非常有意义的。本文主要对一个五自由度机械 手的运动在虚拟环境下作了分析。
Z奄。J口山
图8腕部俯仰关节驱动力
3结束语 通过对五自由度机械手的运动学仿真分析,使
机械手的整个运动过程直观明了,同时测量了手部 末端的位移、速度随时间的变化曲线,及腕关节的 驱动力。对机械手的轨迹规划及其控制奠定了基础。
参考文献:
【1]郑建荣.ADAMs虚拟样机技术入门与提高[M】.北京:机械工业出 版社,2005. 【2]苏厚合,黄圣杰,林佩玲.PRO/ENGINEER2000i入门教程【M].北 京:清华大学出版社,2001. 【3】李军,邢俊文,覃文浩.ADAMs实例教程【M】.北京:北京理工大 学出版社,2002. 【4]柳洪义,宋伟刚.机器人技术基础[M】.北京:冶金工业出版社,
ADAMS (Automatic Dynamic Analysis of Mechanical system)是目前应用比较广泛的虚拟样 机技术软件。所谓虚拟样机技术是一种在获得物理 样机之前,允许技术人员使用系统仿真软件,在各 种虚拟环境中真实地模拟系统的运动,并对其在各 种工况下运动和受力情况进行仿真分析,观察并试 验各组成部件的相互运动情况,它可以在计算机上 方便地修改设计缺陷,快速分析多种方案,进行对