五自由度关节式机械手运动学分析及仿真
机器人手臂5种不同的运动组合

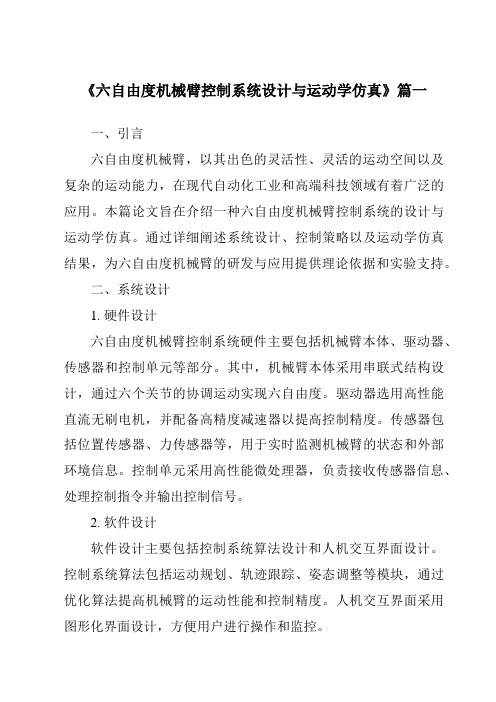
机器人手臂5种不同的运动组合 一般机器人手臂有3个自由度,即手臂的伸缩、左右回转和升降(或俯仰)运动。
手臂回转和升降运动是通过机座的立柱实现的,立柱的横向移动即为手臂的横移。
手臂的各种运动通常由驱动机构和各种传动机构来实现。
手臂的 3 个自由度,可以有不同的运动(自由度)组合,通常可以将其设计成如图2-34 五种形式。
①圆柱坐标型 如图2-34(a)所示,这种运动形式是通过一个转动,两个移动,共三个自由度组成的运动系统,工作空间图形为圆柱形。
它与直角坐标型比较,在相同的工作空间条件下,机体所占体积小,而运动范围大。
②直角坐标型 如图2-34(b)所示,直角坐标型机器人,其运动部分由三个相互垂直的直线移动组成,其工作空间图形为长方体。
它在各个轴向的移动距离,可在各坐标轴上直接读出,直观性强,易于位置和姿态的编程计算,定位精度高、结构简单,但机体所占空间体积大、灵活性较差。
③球坐标型 如图2-34(c)所示,又称极坐标型,它由两个转动和一个直线移动所组成,即一个回转,一个俯仰和一个伸缩运动组成,其工作空间图形为一球体,它可以作上下俯仰动作并能够抓取地面上或较低位置的工件,具有结构紧凑、工作空间范围大的特点,但结构轻复杂。
④关节型 如图2-34(d)所示,关节型又称回转坐标型,这种机器人的手臂与人体上肢类似,其前三个关节都是回转关节,这种机器人一般由立柱和大小臂组成,立柱与六臂同形成肩关节,大臂与小臂间形成肘关节,可使大臂作回转运动θ1和使大管作俯仰摆动θ2,小臂作俯仰摆动θ3。
其特点是工作空间范围大,动作灵活,通用性强,能抓取靠近机座的物体。
⑤平面关节型 如图2-34(e)所示,采用两个回转关节和一个移动关节;两个回转关节控制前后、左右运动,而移动关节则实现上下运动,具工作空间的轨迹图形,它的纵截面为矩形的回转体,纵截面高为移动关节的行程长,两回转关节转角的大小决定回转体横截面的大小、形状、这种形式又称为SCARA型装配机器人。
《2024年六自由度机械臂控制系统设计与运动学仿真》范文
《六自由度机械臂控制系统设计与运动学仿真》篇一一、引言六自由度机械臂,以其出色的灵活性、灵活的运动空间以及复杂的运动能力,在现代自动化工业和高端科技领域有着广泛的应用。
本篇论文旨在介绍一种六自由度机械臂控制系统的设计与运动学仿真。
通过详细阐述系统设计、控制策略以及运动学仿真结果,为六自由度机械臂的研发与应用提供理论依据和实验支持。
二、系统设计1. 硬件设计六自由度机械臂控制系统硬件主要包括机械臂本体、驱动器、传感器和控制单元等部分。
其中,机械臂本体采用串联式结构设计,通过六个关节的协调运动实现六自由度。
驱动器选用高性能直流无刷电机,并配备高精度减速器以提高控制精度。
传感器包括位置传感器、力传感器等,用于实时监测机械臂的状态和外部环境信息。
控制单元采用高性能微处理器,负责接收传感器信息、处理控制指令并输出控制信号。
2. 软件设计软件设计主要包括控制系统算法设计和人机交互界面设计。
控制系统算法包括运动规划、轨迹跟踪、姿态调整等模块,通过优化算法提高机械臂的运动性能和控制精度。
人机交互界面采用图形化界面设计,方便用户进行操作和监控。
三、控制策略1. 运动规划运动规划是六自由度机械臂控制系统的重要组成部分,主要任务是根据任务需求规划出合理的运动轨迹。
本系统采用基于规划的方法,通过预设的运动路径和速度参数,使机械臂按照规划的轨迹进行运动。
同时,采用动态规划算法对机械臂的运动进行实时调整,以适应外部环境的变化。
2. 轨迹跟踪轨迹跟踪是六自由度机械臂控制系统的核心部分,主要任务是使机械臂在运动过程中始终保持正确的姿态和位置。
本系统采用基于PID控制算法的轨迹跟踪策略,通过实时调整控制信号,使机械臂能够准确、快速地跟踪预设的轨迹。
同时,针对机械臂在运动过程中可能出现的扰动和误差,采用鲁棒性较强的控制策略进行优化。
四、运动学仿真为验证六自由度机械臂控制系统的设计效果和运动性能,我们进行了运动学仿真实验。
通过建立三维模型,模拟机械臂在不同任务下的运动过程,并分析其运动轨迹、姿态调整和速度变化等关键参数。
机械手臂动力学建模与仿真

机械手臂动力学建模与仿真机械手臂是一种用于实现复杂动作的机器人设备,它通常由各种活动关节和动力器件组成,可以用于生产线上的装配、搬运等任务。
机械手臂的动力学建模和仿真是机器人研究领域的重要方向之一,它可以帮助我们更好地理解机械手臂的运动规律和控制策略,为机械手臂的设计和优化提供依据。
一、机械手臂的动力学建模机械手臂的动力学建模是指根据机械手臂的结构和运动特性,建立起机械手臂的运动学和动力学方程,可以用于模拟和预测机械手臂在各种工作条件下的运动状态。
机械手臂的动力学建模需要考虑多个方面,其中包括机械手臂的结构参数、关节位置和速度、负载矩阵和力矩控制等内容。
在机械手臂的动力学建模中,重要的一步是建立机械手臂的运动学方程。
机械手臂的运动学方程可以得到机械手臂各关节的位置、速度和加速度等运动参数。
通过运动学方程,可以计算出机械手臂末端执行器的位置和姿态等信息。
除此之外,还需建立机械手臂的动力学方程。
机械手臂的动力学方程通常考虑质量、惯性、关节力矩和外部负载等因素,可以用于计算机械手臂在不同负载下的动力学响应。
二、机械手臂的仿真机械手臂的仿真是指用计算机模拟机械手臂的运动状态和动作效果,以及对其进行控制和优化。
机械手臂的仿真可以用于验证机械手臂的动力学模型的正确性,优化机械手臂的设计和运动控制算法,评估机械手臂在不同工况下的能力。
机械手臂的仿真可以使用多种方法,其中最常用的是基于物理仿真引擎的仿真方法。
物理仿真引擎可以求解机械手臂的运动学和动力学方程,并考虑机械结构和物理环境的影响,模拟机械手臂在不同工作条件下的运动和操作效果。
基于物理仿真引擎的仿真方法可以有效提高机械手臂的设计和控制效率,减少试错成本。
三、机械手臂的控制策略机械手臂的控制策略是指确定机械手臂的运动轨迹和动作序列,以及控制机械手臂的动力输出和力矩控制方式等内容。
机械手臂的控制策略需要综合考虑机械手臂的结构和工作环境等因素,以实现高效、精准、安全的控制效果。
苹果采摘机器人机械手运动学分析与仿真

苹果采摘机器人机械手运动学分析与仿真马贵飞;马履中;杨文亮【摘要】通过齐次坐标变换建立了机械手的运动学模型,并对正运动学以及逆运动学分别进行了求解,通过初始位姿对运动学正反解进行了初步验证;利用矢量积法求解了机械手的雅克比矩阵,建立了机械手关节速度与末端执行器速度的瞬时对应关系;由机械手的具体结构设计出发,利用Pro/E 建立了机械手的实体样机模型,并导入仿真软件 ADAMS 中对其进行运动学仿真验证,使机械手整个运动过程直观化;同时分析了仿真过程中机械手各关节的驱动与机械手末端点运动变化的关系.仿真结果表明机械手的运动学方程解完全正确.【期刊名称】《农机化研究》【年(卷),期】2010(032)007【总页数】5页(P21-25)【关键词】苹果采摘机器人;机械手;样机模型;运动学分析;仿真【作者】马贵飞;马履中;杨文亮【作者单位】镇江市高等专科学校,机械系,江苏,镇江,212003;江苏大学,机械学院,江苏,镇江,212003;江苏大学,机械学院,江苏,镇江,212003【正文语种】中文【中图分类】TP242.3;S2250 引言我国苹果种植面积居世界首位,种植苹果已有3 000年多历史,直到目前收获作业都要靠人工完成,作业环境差、危险性高、既耗时又费力。
因此,发展机械化收获技术,研究开发苹果及其它果蔬采摘机器人,具有重要的意义。
自从1983年第1台西红柿采摘机器人在美国问世以来,采摘机器人的研制开发得到了很快发展,包括日本 Kondo-N 等人研制的西红柿采摘机器人、黄瓜采摘机器人、草莓采摘机器人等。
在国内,采摘机器人的研究才刚刚起步,上海交通大学正在进行黄瓜采摘机器人的研究,浙江大学对七自由度西红柿收获机械手进行了机构分析与优化设计研究[1],中国农业大学对采摘机械手的视觉识别系统进行了研究,东北大学研制了林木球果采摘机器人。
国外已有一些国家开展了苹果采摘机器人的研究工作。
有关资料[8]表明,法国、韩国相继开展了苹果收获机器人研究,并试做了样机。
机械手运动分析介绍课件

柔性化:机械手将具备更高的灵活性和适应 性,满足不同场景的需求
发展趋势分析
智能化:机械手将具备自主学习和 决策能力,提高工作效率
集成化:机械手将与其他设备集成, 实现自动化生产线
轻量化:机械手将采用更轻便的材 料和结构,提高运动速度和灵活性
环保化:机械手将采用环保材料和 节能技术,降低能耗和污染
传感器与反馈:设计合适的传感器,如位置传感器、力传 感器等,实现对机械手运动状态的实时监测与反馈
控制参数优化:通过实验和仿真,优化控制参数,提高 机械手的运动精度和稳定性
控制策略实现
01
控制算法:PID控制、模糊控制、 神经网络控制等
02
传感器:位置、速度、加速度等 传感器
03
驱动系统:电机、液压、气动等 驱动系统
并联型机械手:基于并联机构,适用 0 5 于高速、高精度的运动和操作任务
复合型机械手:结合多种机械手的 0 6的应用领域
01
工业自动化:用于生产 线上的物料搬运、装配、 焊接等操作
02
医疗领域:用于手术、 康复治疗、辅助诊断等
03
服务行业:用于餐厅、 酒店、商场等场所的服 务机器人
机械手可以提高生产效率,降低 人工成本,提高产品质量
机械手的分类
直角坐标机械手:基于直角坐标系, 0 1 适用于简单的搬运和装配任务
圆柱坐标机械手:基于圆柱坐标系, 0 2 适用于旋转和摆动任务
球坐标机械手:基于球坐标系,适 0 3 用于空间内的任意方向运动
关节型机械手:基于关节结构,适 0 4 用于复杂的运动和操作任务
发展趋势展望
智能化:机械手将具备 自主学习和决策能力, 提高工作效率
一种新型五自由度并联机床的运动学和动力学分析

- II -
哈尔滨工业大学工学硕士学位论文
目
摘
录
要 ............................................................................................................. I
Abstract ............................................................................................................. II 第 1 章 绪论 ......................................................................................................1 1.1 课题背景及研究的目的和意义 ...............................................................1 1.2 并联机床的国内外研究现状 ...................................................................2 1.2.1 并联机床的发展和应用方面 .............................................................2 1.2.2 并联机床的理论研究方面 .................................................................4 1.3 课题主要研究内容 ....................................................................................6 第 2 章 运动学分析 ..........................................................................................7 2.1 引言 ...........................................................................................................7 2.2 机床构型确定 ............................................................................................7 2.3 机构位姿逆解 ............................................................................................8 2.3.1 坐标转换矩阵 .....................................................................................8 2.3.2 逆解方程的建立 .................................................................................9 2.4 速度和加速度分析 ..................................................................................13 2.4.1 速度分析和雅克比矩阵 ...................................................................13 2.4.2 加速度分析 .......................................................................................15 2.5 本章小结 .................................................................................................16 第 3 章 工作空间分析 ....................................................................................17 3.1 引言 .........................................................................................................17 3.2 工作空间的影响因素 ..............................................................................17 3.2.1 滑块极限行程约束 ...........................................................................17 3.2.2 运动副极限转角约束 .......................................................................18 3.2.3 杆件之间的干涉 ...............................................................................20 3.2.4 机构的奇异位形 ...............................................................................21 3.3 极坐标搜索法确定机床的工作空间 ......................................................22 3.3.1 工作空间的简介 ...............................................................................22 3.3.2 工作空间的降维描述 .......................................................................22 3.3.3 工作空间的极坐标搜索 ..................................................................25
机械手臂运动学分析及运动轨迹规划
机械手臂运动学分析及运动轨迹规划机械手臂是一种能够模仿人手臂运动的工业机器人,正因为它的出现,可以将传统的人工操作转变为高效自动化生产,大大提高了生产效率和质量。
而机械手臂的运动学分析和运动轨迹规划则是实现机械手臂完美运动的关键。
一、机械手臂运动学分析机械手臂的运动学分析需要从几何学和向量代数角度出发,推导出机械手臂的位姿、速度和加速度等运动参数。
其中,机械臂的位姿参数包括位置和姿态,位置参数表示机械臂末端在空间中的坐标,姿态表示机械臂在空间中的方向。
对于机械臂的位姿参数,一般采用欧拉角、四元数或旋转矩阵的形式描述。
其中,欧拉角是一种常用的描述方法,它将机械臂的姿态分解为绕三个坐标轴的旋转角度。
然而,欧拉角的局限性在于其存在万向锁问题和奇异性等问题,因此在实际应用中,四元数和旋转矩阵往往更为常用。
对于机械臂的运动速度和加速度,可以通过运动学方程求出。
运动学方程描述了机械臂末端的速度和加速度与机械臂各关节角度和速度之间的关系,一般采用梯度方程或逆动力学方程求解。
二、机械手臂运动轨迹规划机械手臂的运动轨迹规划是指通过预设规划点确定机械臂的运动轨迹,以实现机械臂的自动化运动。
运动轨迹的规划需要结合机械臂的运动学特性和运动控制策略,选择合适的路径规划算法和控制策略。
在机械臂运动轨迹规划中,最重要的是选择合适的路径规划算法。
常见的路径规划算法有直线插补、圆弧插补、样条插值等。
其中,直线插补最简单、最直接,但是在复杂曲线的拟合上存在一定的不足。
圆弧插补适用于弧形、曲线路径的规划,加工精度高,但需要计算机械臂末端的方向变化,计算复杂。
样条插值虽能够精确拟合曲线轨迹,但计算速度较慢,适用于对路径要求较高的任务。
除了选择合适的路径规划算法,机械臂运动轨迹规划中还需要采用合适的控制策略。
常用的控制策略包括开环控制和闭环控制。
开环控制适用于简单的单点运动,对于复杂的轨迹运动不太适用;而闭环控制可以根据机械臂末端位置的反馈信息及时调整控制器输出,适用于复杂轨迹运动。
机器人机械手臂运动学与动力学分析
机器人机械手臂运动学与动力学分析1.引言随着科技的不断进步,机器人技术已经广泛应用于生产制造、医疗卫生、军事防务等领域。
机器人的机械手臂是其重要组成部分,通过其灵活的运动能力,使机器人能够执行各种任务。
在机械手臂的设计和控制中,运动学和动力学是两个重要的方面。
本文将对机械手臂的运动学和动力学进行深入分析。
2.机械手臂的运动学机械手臂的运动学研究机器人手臂的位置和运动方式。
运动学分析通常包括正、逆运动学两个方面。
2.1 正运动学正运动学研究机器人手臂的运动学模型与其关节角度之间的关系。
对于n自由度的机械手臂,可以通过构建齐次变换矩阵的方法,将末端执行器的位置和姿态与关节角度联系起来。
2.2 逆运动学逆运动学研究机械手臂如何通过末端执行器的位置和姿态来确定关节角度。
逆运动学问题通常是非线性的,并且存在多解性。
通过使用几何方法、代数方法或数值方法,可以求解机械手臂的逆运动学问题。
3.机械手臂的动力学机械手臂的动力学研究机器人手臂受力和加速度之间的关系。
动力学分析可以帮助我们理解机械手臂的受力情况,为控制和优化机械手臂的运动提供基础。
3.1 机械手臂的运动方程机器人手臂的运动方程是描述手臂在特定坐标系下的加速度与外部力之间关系的方程。
通过运动方程,可以推导出机械手臂的动力学模型。
3.2 动力学优化动力学优化是基于机械手臂的动力学模型,通过优化算法来最小化手臂的能耗、提高执行效率或实现更加精确的运动。
通过对机械手臂的动力学特性进行深入分析,可以找到最佳的控制策略和参数设置。
4.机械手臂运动学与动力学的应用机器人机械手臂的运动学和动力学分析在实际应用中具有重要意义。
4.1 生产制造领域在生产制造领域,机械手臂的运动学和动力学分析可以帮助优化生产线的布局和工艺流程。
通过合理设计机械手臂的运动轨迹和力矩分配,可以实现高效率和高精度的自动化生产。
4.2 医疗卫生领域机械手臂在医疗卫生领域的应用越来越广泛,例如辅助手术机器人。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
务I造 lI5 ,tb 五自由度关节式机械手运动学分析及仿真 Kinematic analysis and simulation of the 5-DOF joint manipulator 刘萍,陈莹 LlU Ping.CHEN Ying (宿迁学院,宿迁223800) 摘要:本文针对一种五自由度关节式机器人,利用各关节处相邻两连杆相对关系得到各连杆对基座的 位姿描述,基于此,在机械手末端位姿已知的情况下,对其进行逆运动学分析,推导了各关 节变量(角度)的公式表达。最后,利用VB软件编程实现了该机械手正、逆运动学分析的参 数化及位姿的主、俯视图可视化仿真,为后续的机械手设计与研究提供一定的理论基础。 关键词:五自由度;机械手;运动学;仿真 中图分类号:TH1 1 2 文献标识码:A 文章编号:1 009—01 34(201 1)1 O(上)-0009-03 Doi:1 0.3969/J.issn.1 009-01 34.2011.1 0(1-).04
0引言 在过去三四十年问,机器人技术获得了引人 注目的发展,其应用范围遍及工业、农业、医疗 及航空航天等领域H ]。机器人运动学分析是对其 进行动力学及控制研究的基础 】,文献[7]利用纯 软件的方法研究了五自由度关节型机器手的运动 动力学,并进行了三维仿真,由于缺少理论分析 而不方便对后续的力学控制进行研究。本文针对 这种类型的机器手,利用各关节处相邻两连杆相 对关系得到各连杆对基座的位姿描述,即正运动 学分析过程,然后,利用两矩阵相等时对应位置 元素相等的特点,对该机械手的逆运动学进行了 求解。最后,利用VB软件编程实现了该机械手运 动学分析的参数化及位姿的主、俯视图的可视化 仿真。 1运动学模型建立
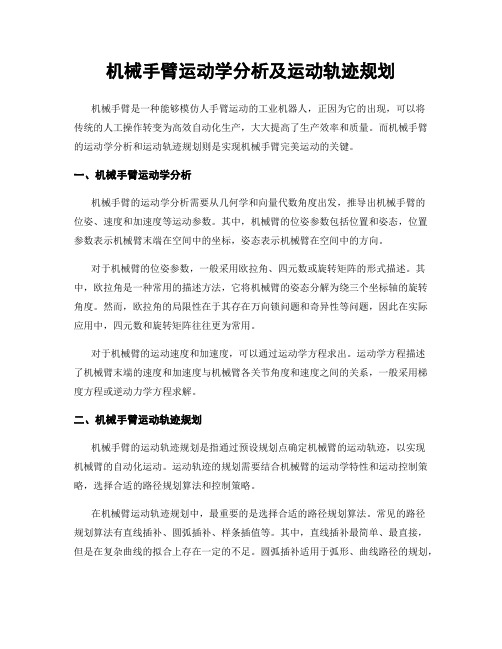
图1五自由度关节式机械手机构简图
图1为研究的五自由度关节式机械手的机构 简图,该机械手包含五个转动关节,主要由底 座、腰(连杆1)、大臂(连杆2)、小臂(连杆 3)、腰曲伸(连杆4)及腕组成。如图1所示建 立各关节坐标系{1} ̄{5},杆件参数及关节变量 见表1(角度取逆时针方向为正),其中 为连杆 i(i=l,5)绕 轴旋转的角度或连杆i一1(i=2,3,4) 到连杆i绕 轴转动的角度, ¨为连杆i-1的长度, 为连杆从z¨到z 绕 旋转的角度(满足右手定则时 为正),d 为相邻连杆的公共法线的距离。 表1五自由度关节式机械手杆件参数和关节变量
f ai.1 ai.i 1 日1∈[一17O。,l70。] 0 O。 O 2 ∈[一135O,135。] 0 —90。 O 3 ∈[一9O。,90。] a2 O。 O 4 ∈[一90。,90。] a3 O。 O 5 ∈[一180。,18O。] O 一90。 O
2运动学分析 2.1正运动学 正运动学分析过程即求解在确定的机械手尺 寸下,不同的关节变量 输入时机械手末端坐标系 对主坐标的位置和姿态。对于转动关节,关节两 侧连杆i对连杆i一1的相对位置由矩阵表示为
收稿日期:2011-08—24 作者简fr:刘萍(1980一),女,江苏常州人,讲师,研究方向为数控与机械运动动力学。
第33卷第1O期2011—10(上) 19] 一sO.
cO c 0c cO。SI3( 0 、l 甸 出 0 一S仪, Cl3( 1 0 l —d S仪
di c Oc l
的条件下求取各杆臂的转动角度,即巳知 f 1、 nx,ny,nz,ox,Oy,Oz,ax,ay,az,求 , ,05。 一 由式(2)知,连杆5对主坐标的关系用连杆 问相互关系的传递表示为 其中c 表示cosO ,sO 表示sinO ,其他依次类 推。 将对应的 ,d , 代入式(1)即可得到相 邻连杆问的关系。丁。, , , , 丁5。则连杆i 对主坐标的关系为:
。 =兀 (i=l,2,3,4,5) (2)
连杆l对主坐标的关系:。71。 连杆2对主坐标的关系:。 =。TI・ 连杆3对主坐标的关系:。 =。T 2 连 ̄4fff主坐标的关系:。r4。T+3T4 连杆5对主坐标的关系:。 =。r4 4 代入上述各式,得到机械手末端装置(腕) 对基座的关系为 1 0 a P l
。 :
Oy ay Py l (3) 1.
1 0 0 0 l I 其中,n ,力 表示末端X’分别在 0 o'Zo方向 上的投影;o ,0 ,0 表示末端Y’分别在 o 0,zo方向 上的投影;ax,a ,a 表示末端z’分别在 0 0,Z0方向 上的投影。 式中, 』 ClC234C5+S1S5
S LC234C5一C1S5 ,zz -¥234C5 O 一 C234S5+SIC5 01 -SIC234S5一C1C5
O: ¥234S5 a -c1s234 a 一s1s234 az -
C234
其Oec 表示cosO ,C234表示cos(02+ ,+ ),其他 依此类推。 2.2逆运动学分析 逆运动学分析过程即在末端位姿已知
[1Ol 第33卷第1O期2011—10(上)
。 =。 (4)
式(2)两端左乘。T・~,得到 。 ~・。 = ・ ・ r4・ i5)
化解之,由式(5)等号两边矩阵的(2,4)位
置的元素相等,令(p1:arctanf 1, 则 P e。=(p。_[sgn(【p )一sgn(sin0。)] (6)
其中,S g n(X)为符号函数:当x>0时, sgn(x)=l;当x<0时,sgn(x)=l。 由式(5)等号两 矩阵的(2,4)位 的元素
艚, 一tan(O sln O ̄O等COS121 I 一 J
0 :(p:_[sgn )一sgn(sinO )] (7) 由式(5)等号两边矩阵的(1,4)、(3,4) 位置的元素分别相等,通过适当的化解可以得到
c。 e.: 二! 二竺 ± !! !! ! 2a1a
tano : ! !! ! ! 二! 一a2P:sinO3+a2 cos03+a
in0 =± 则o,=p一[sgn(p)一sgn(sino,)] (9) 代入式(8)得 …f-a 2p sin 03 a 2 COSO 3al Jl + + j
、 (10) 由式(5)等号两边矩阵的(1,3)、(3,3) 位置的元素分别相等,通过适当的化解可以得到
0.:arctan ! ! !± ! 1_0,4 I —— — — 2 ‘ a
:
3基于VB的运动仿真
上述理论分析实现了五自由度关节式机械手
器 、l 訇 化 的正、逆运动学分析,在此基础上,这里利用VB 软件建立交互式仿真界面,方便参数化实现机械 手运动的求解。 图2为正运动分析参数化过程,图3为逆运动参 数化过程,在机械手尺寸参数不变的情况下,将正 运动的分析的结果作为逆运动分析的位姿输入,所 得到的结果与正运动输入误差很小,几乎相同。
图2正运动分析参数化 ÷■ ㈨ ——
x … ≤: ●薹=} …一 … # 97一 -3∞『I 一 -一 ~ 1 6… ●2 { ~ i ~ } ~ ~ } “ DZ ̄ 614…*I : i f彝 ll一 l…一 7
★■I1 ̄ 1200…一 l黔;}
十#I2 ̄ 8 40一~
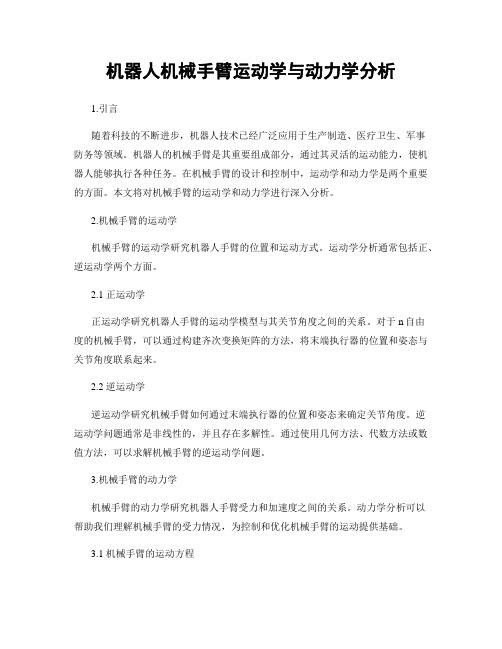
图3逆运动分析参数化 图4、图5分别为机械手的正运动和逆运动仿 真,采取对简化了的机械手用主视图和俯视图表 示的方式。由两图比较可以清楚看到,正、逆运 动下机械手的位姿完全相同。
4结论 本文针对已有的利用纯软件对五自由度关节 式机械手研究在理论方面的不足,利用关节处相 邻两连杆处的相对位置关系,对机械手末端进行 了运动学分析,同时利用VB软件编程实现了运动 学的参数化求解以及机械手位姿的仿真,研究成 果为后续的机械手具体设计及研究提供了一定的 基础。
图4正运动仿真 图5逆运动仿真 参考文献: [I】王朋,李俊峰,宣斌.大口径光学元件五自由度抛光机械手 的设计[J】.光学技术,2010,36(1):116—120. [2】卢伟,宋爱国,蔡建荣,等.柑橘采摘机器人结构设计及运动 学算法【J】.东南大学学报(自然科学版),201 1,41(1):95—100. 【3】车仁炜,吕广明,陆念力.五自由度康复机械手的动力学分 析[J].哈尔滨工业大学学报,2005,37(6):744-747. 【4】彭利平,訾斌_3自由度柔索并联机构的运动轨迹规划【J]. 机械传动.2010,34(5):13—16. 【5]李永刚,宋秩民,张策.基于现代微分几何的机器人研究现 状【J】.中国机械工程,2007,18(2):237—243. 【6】蔡自兴.机器人学(第二版)【M].北京:清华大学出版社, 2009. 【7]杨雄,孔庆忠,张海平.五自由度关节型机器人结构设计及 其动态仿真研究【J1.机械设计与制造,2009,(8):169—171.
第33卷第1O期2011—10(上) [111