机载合成孔径雷达成像及定位
机载合成孔径雷达成像及定位的开题报告
机载合成孔径雷达成像及定位的开题报告一、研究背景机载合成孔径雷达(SAR)是一种利用飞机上的雷达设备进行地面成像的技术。
SAR技术采用了合成孔径技术,即通过分别接收地面上不同位置反射回来的雷达信号,利用计算机算法将这些信号合成为一张高分辨率的地面图像。
合成孔径技术的优势在于从雷达到地面的距离和旋转角度变化不会影响成像质量,能够获得高分辨率、高质量的地面图像。
因此,SAR技术在航空、军事、遥感及资源调查等领域应用广泛。
SAR成像技术与定位技术是SAR技术中的两个重要研究方向。
成像技术旨在通过合成孔径技术获得高分辨率、高品质的地面图像,而定位技术则旨在精确地定位地面上的目标,例如建筑物、道路、河流等等。
二、研究目的本文旨在探讨机载SAR的成像及定位技术。
具体研究内容包括:1.机载SAR成像技术的基本原理,包括系统组成、信号处理和成像算法等。
2.机载SAR成像质量的评价指标,包括分辨率、噪声、动态范围等。
3.机载SAR定位技术的基本原理,包括多普勒频移、多普勒参数估计等。
4.应用机载SAR技术进行目标检测、识别和跟踪等领域的研究进展。
三、研究方法本文将采用文献综述和实验仿真相结合的方法,综合评价机载SAR成像及定位技术的研究进展。
具体方法如下:1.文献综述:通过收集、整理和分析相关领域的文献资料,综述机载SAR成像及定位技术的基本原理、研究进展和应用前景。
2.实验仿真:采用MATLAB等模拟软件,模拟机载SAR系统的信号处理和成像算法,进行实验仿真,分析机载SAR成像质量和定位精度。
四、研究意义本文的研究意义在于探讨机载SAR技术在航空、军事、遥感等领域中的广泛应用。
通过分析机载SAR成像及定位技术的基本原理和研究进展,可以为相关领域的研究提供参考和借鉴。
同时,本文还可以为机载SAR技术的研究人员提供一定的指导和启示。
五、预期成果本文的预期成果包括以下几个方面:1.综述机载SAR成像及定位技术的基本原理和研究进展,对机载SAR技术的应用和发展具有指导意义。
合成孔径雷达的动目标成像与检测

合成孔径雷达的动目标成像与检测摘要动目标的成像与检测是合成孔径雷达(SAR)领域中的研究热点之一,不论是在军事上还是在民用上都有很重要的意义。
目前,世界上很多国家都在积极发展动目标的检测和成像技术,研制先进的动目标检测和成像雷达系统,努力寻找各种高效、实用的动目标检测和成像方法。
本文主要研究了单通道SAR的动目标检测和成像技术,旨在提高动目标的检测概率,获取动目标的运动参数并对其精确成像。
主要工作如下:1、分析了SAR的运动目标回波模型,探讨了目标运动引起的多普勒质心变化,以及这些变化对常规SAR成像结果的影响。
2、对SAR的动目标检测和成像原理做了介绍,分析了步进频信号和线性调频信号的一维距离像,对步进频信号的一维距离像进行了重点分析。
3、对信号进行仿真,对不同参数的一维距离像进行比较,分析仿真结果。
关键词:合成孔径雷达,动目标检测和成像,一维距离像Moving Targets Detection and Imaging of SARAbstractMoving Targets Detection and Imaging (MTDI) is hot in Synthetic Aperture Radar (SAR) research and plays an important role in both martial field and civilian field. Now many countries in the world are making great efforts to develop advanced MTDI systems and explore high efficient MTDI algorithms. The key techniques of MTDI are studied in this dissertation for getting high detection probability, accurate parameters and good images of moving targets.The major work of this dissertation is as follows:1. After analyzing the model of moving targets’ echoes, the change s of Doppler history are discussed in detail, which are due to targets’ moving. It is analyzed that the influence of the changes on the conventional SAR imaging.2. In this paper, the principle of MTDI are introduced. At the same time, we analyze the High Range Resolution Profile of the step frequency signal and the linear frequency modulation signal. The High Range Resolution Profile of the step frequency signal is more important in our paper.3.We will simulation ,then change the parameters of the signal and analyse the difference between them.Key words:Synthetic Aperture Radar, Moving Targets Detection and Imaging, High Range Resolution Profile.目录1 绪论 (1)1.1 合成孔径雷达的动目标检测和成像的意义 (1)1.2 合成孔径雷达研究及动态 (2)1.3本文的主要内容 (5)2 SAR动目标检测和成像原理 (6)2.1 SAR理论模型和成像原理 (6)2.2 运动目标的回波信号分析 (10)2.3目标运动引起的多普勒质心变化及其对常规SAR成像的影响 (12)2.3.1 目标运动引起的多普勒质心变化 (13)2.3.2动目标多普勒质心变化对常规SAR成像的影响 (14)2.4本章小结 (14)3 合成孔径雷达动目标的一维距离像 (15)3.1 频率步进脉冲信号距离成像原理分析 (15)3.2 频率步进雷达发射信号波形及设计准则 (18)3.2.1 频率步进波形 (18)3.2.2 频率步进信号相关参量设计 (19)3.3 一个步进频信号的一维距离像 (24)3.4仿真结果 (27)3.4.1 第一组参数实验数据及结果 (27)3.4.2 第二组参数实验数据及结果 (29)3.4.3 第三组参数实验数据及结果 (31)3.4.4 第四组参数实验数据及结果 (32)3.4.5 第五组参数实验数据及结果 (34)3.4.6 对实验结果的分析 (35)3.4.7 参考程序 (36)3.5 总结 (38)4 结束语 (39)参考文献 (40)致谢 (42)1 绪论1.1 合成孔径雷达的动目标检测和成像的意义检测运动目标是现代雷达要完成的功能之一。
机载聚束模式合成孔径雷达的成像算法

基于图像聚焦与运动补偿的改进算法
总结词
详细描述
该算法通过引入图像聚焦和运动补偿技术, 实现了对运动目标和复杂背景的高分辨率成 像。
基于图像聚焦与运动补偿的改进算法,通过 对运动目标和复杂背景进行聚焦和补偿处理 ,提高了成像的分辨率和对比度。该算法具 有较高的计算复杂度,但能够提供高质量的 SAR图像,适用于对运动目标和复杂背景的
实验结果展示与分析
结果展示
将机载聚束模式合成孔径雷达的原始回波数据转化为 地物图像,并进行对比分析。
结果分析
通过与实地采集的地物图像进行对比,验证了机载聚 束模式合成孔径雷达的成像效果。
成像算法性能评估与对比分析
性能评估:评估机载聚束模式合成孔径雷达的成像算法在分辨率、对比度、清晰度等方面的性能指 标。
机载聚束模式合成孔径雷达 的成像算法
2023-11-06
目 录
• 成像算法概述 • 聚束模式SAR基本成像算法 • 改进型聚束模式SAR成像算法 • 成像算法的优化与实现 • 成像算法验证与分析 • 结论与展望
01
成像算法概述
合成孔径雷达(SAR)基本原理
合成孔径雷达是一种雷达成像技术,通过在飞行器上安装雷达天线,利用目标的 反射信号,生成高分辨率的图像。
数据输出与显示
将成像结果和目标信息进行输出和 显示,为后续任务提供决策支持。
05
成像算法验证与分析
实验场景与数据采集
实验场景
机载聚束模式合成孔径雷达(CS-SAR)在城市、农田、 山丘等典型地物场景中进行实验。
数据采集
采集不同飞行高度、速度、姿态等条件下的雷达回波数 据,以及对应的地物图像数据。
除了军事应用外,该成像算法也可应用于民用航空领域,例如机场跑道检测、地形测绘、 气象观测等方面,具有广泛的应用前景。
合成孔径雷达在舰船目标定位和成像技术的应用研究
合成孔径雷达在舰船目标定位和成像技术的应用研究合成孔径雷达(Synthetic Aperture Radar,简称SAR)是一种使用雷达技术进行远距离探测和成像的现代雷达系统。
与传统的雷达系统相比,合成孔径雷达具有独特的优势,在舰船目标定位和成像方面有着广泛的应用研究。
合成孔径雷达利用雷达波通过目标后的回波信号,进行信号处理,再根据一定的算法和技术手段,重建出目标的反射特征,实现对目标的定位和成像。
相较于其他成像技术,合成孔径雷达的成像质量更高、分辨率更高、和对目标的探测距离更远。
在舰船目标定位方面,合成孔径雷达凭借其高精度的成像能力,能够精确定位舰船目标,包括目标的位置、速度以及航向等信息。
通过对多次回波信号的积累并应用合成孔径成像算法,合成孔径雷达可以构建出具有极高精度的目标三维定位图像。
同时,合成孔径雷达还能够对移动目标进行跟踪,及时获取目标的轨迹和船体运动信息。
在舰船目标成像方面,合成孔径雷达能够实现高质量、高分辨率的目标成像,即使在复杂的雷达环境中也能保持较高的图像质量。
合成孔径雷达通过对连续的雷达回波信号进行处理并利用相干积累技术,以及算法来获取高分辨率的目标图像。
这使得合成孔径雷达在船舶领域中被广泛应用于船舶目标的探测、识别和监控。
此外,合成孔径雷达还可以与其他传感器进行集成和协同作业,如红外相机、光电探测器等,对舰船目标进行多模态的探测和成像。
这样可综合利用各种传感器的优势,提高目标的定位和成像的准确性和可信度。
总体而言,合成孔径雷达在舰船目标定位和成像技术中具有广泛的应用前景。
其高分辨率、高精度的成像能力,以及与其他传感器的协同作业,使其在海上作战、航行安全监控等领域发挥重要作用,为军事、海事等相关部门提供重要的技术支持。
弹载合成孔径雷达成像处理及定位误差分析
,£ ≈ ( )
( cs n C S CS s E 。 E i 0+ s O  ̄ O 0一 i ) n
当雷 达 波 束 所 照 射 区 域 的 同 一 距 离 环 带 上 出 现 不 同方 位 角 的 两 个 目标 B , C 时 ,两 目标 间存 在 多 普 勒 频 差 ,通 过 合 理 地 设 置 多 普 勒 滤 波 器 ,就 可 以 区 分 开 真 实 天 线 波 束 照 射 宽 度 内距 离 相 同 而方 位 不 同 的 回波 ,从 而 有 效 改 善方 位 分 辨 力 . 22雷 达 信 号 数 学 模 型 .
制 导 中 的应 用 实 验 .
2弹 载 S R原 理 A
21空 间几 何 关 系 .
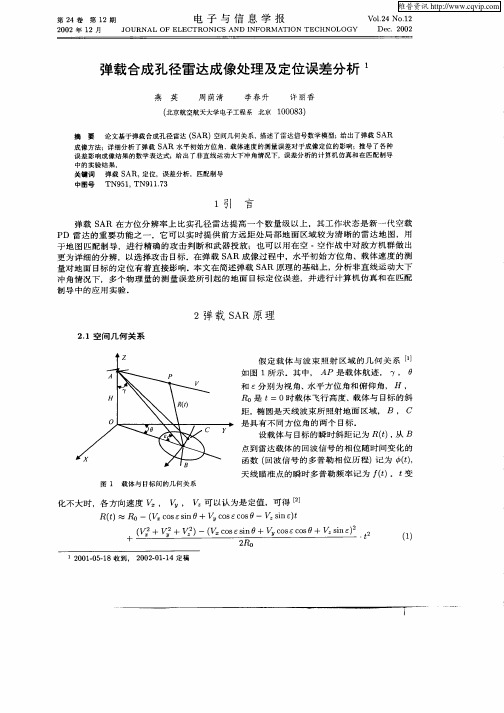
假 定 载 体 与 波 束 照 射 区 域 的 几 何 关 系 L l J
如 图 1 示 .其 中 , 所
P 是 载 体 航 迹 , 7,
和 E分 别 为 视 角 、 平 方 位 角 和 俯 仰 角 , H , 水
设载体 在很 短时 间内作 匀速直线 飞行 ,整个雷达 波束所 照射区域 的回波信号 s£ 为 [ ( ) 。 】
s ) ,。 (丁) , ㈤ = I s R) c 一(一 ) [ 2 t
其中 ,R 0 =I( ,)epj ( ,) 为分辨单元的地面散射系数, 2 t C为反射回波时间 ( ,) ,R I { ̄R ) x R( / ) 延迟 , R . R . O为分 辨单元面 积, R 为斜 距。为讨论方便 ,令天 线方 向性 函数 A() 1. d d O=
函数 ( 回波信号 的多普 勒相位 历程) 为 ( , 记 £ ) 天线 瞄准 点的瞬时多普 勒频率记为 f t 。t ( ) 变
图 1 载体 与 目标间的几何关 系
合成孔径雷达成像侦查任务规划与参数设置
合成孔径雷达成像侦查任务规划与参数设置
合成孔径雷达(Synthetic Aperture Radar, SAR)是一种有效的侦查和成像技术,通过利用雷达的运动和信号处理技术,实现对地物进行高分辨率的成像和侦查。
下面是合成孔径雷达成像侦查任务规划与参数设置的相关内容:
1. 任务区域选择:根据实际需求,选定需要进行成像侦查的区域。
考虑目标位置、地形、覆盖范围等因素进行综合评估。
2. 卫星轨道设计:根据任务区域选择合适的卫星轨道,一般选择极地轨道或近极轨道以实现全球覆盖。
3. 雷达频率选择:根据任务需求和地物特性选择合适的雷达频率。
通常选择C波段或X波段,可根据地物特性以及大气等因素进行考量。
4. 信号处理参数设置:包括雷达发射信号参数和接收信号处理参数的设置。
根据地物特性和任务需求,选择合适的脉冲宽度、重复频率、脉冲压缩方式、图像采样率等参数。
5. 数据采集与处理:确定合适的数据采集方式和解调方式,包括数据融合、多通道处理等。
根据任务需求和设备性能进行优化。
6. 成像参数设置:选择适当的成像算法和参数设置。
常用的成像算法有Range-Doppler算法、Chirp Scaling算法等,可根据任务需求和数据特点进行选择。
7. 数据解译与分析:根据采集到的数据进行解译和分析,提取出目标物体的特征信息。
可以结合遥感图像处理软件进行进一步的数据处理和分析。
需要注意的是,以上提到的参数设置需要根据实际情况进行调整,以达到理想的成像效果和侦查精度。
同时,也需要遵守相关的法律法规和技术规范,确保合成孔径雷达的使用符合规范。
合成孔径雷达 全天候透视世界的千里眼
雷达进行地面测绘的最简单的方法称作实波束地图测绘,广泛用在战斗机雷达上。
这种测绘方式利用小型雷达天线的主波束扫描飞机前方的地形,所测绘出的飞机前方的地形图显示在下视显示器上。
实波束测绘存在的问题是:雷达天线提供的分辨率较低;对于直经约400毫米的典型机载雷达而言,天线波束宽度约4°,这种波束的方位分辨率取决于雷达作用距离的远近,最好的不过几百米,最差为几公里。
这种雷达波束产生的原始图像限制了雷达进行地面测绘的有效性,尽管作为导航辅助是有效的,但不能显示单个目标。
为了解决雷达波束测绘的有效性,合成孔径雷达技术便应运而生。
高分辨率成像环境监测、地区资源测绘和军事行动需要高分辨率广域成像,一般雷达在恶劣天气下,必须多次成像才能采集到图像。
合成孔径雷达系统利用雷达信号的长距离传播特征和现代数字电子技术处理复杂的信息,能够生成高分率的图像。
合成孔径雷达的工作原理很复杂,本文避其复杂性,简要地谈谈合成孔径雷达的基本工作方式。
首先从机载合成孔径雷达谈起。
如题图所示,机载合成孔径雷达成像的方向与飞机的飞行速度方向正交,它一般生成两维图像。
其中的一维称为作用距离或航迹,它是雷达到目标的“视距”距离。
在这一点上,合成孔径雷达与大多数其他工作方式的雷达相似,作用距离由精确测量来自目标的雷达回波脉冲的传输时间来确定。
在最简单的合成孔径雷达中,作用距离分辨率由发射脉冲的宽度决定,即脉冲越窄,测得的距离精度越高。
另一维称作方位,它与作用距离正交。
方位维能使合成孔径雷达获得不同于其他雷达的相对精确的方位分辨率。
为了获得精确的方位分辨率,需要将所发射和接收的能量聚焦成锐波束,用波束锐度界定方位分辨率。
由于雷达频率比光系统低,即使是获得中等的分辨率,天线的直径也需要达到几百米,远大于机载平台所能够乘载的天线尺寸,雷达探测目标的距离和分辨率因此受到限制。
但是合成孔径雷达解决了上述问题,利用雷达与目标的相对运动,把雷达在不同位置接收到的目标回波信号进行相干处理,可以使小孔径天线起到大孔径天线的效果,这也是合成孔径的含义,采用这种技术的雷达因此而被称为合成孔径雷达。
合成孔径雷达成像技术及应用
合成孔径雷达成像技术及应用合成孔径雷达(Synthetic Aperture Radar,简称SAR)是一种基于雷达技术的成像方法。
它利用了雷达回波信号的相位差异来合成一个大型的接收器孔径,从而提高雷达的分辨率和成像质量。
合成孔径雷达成像技术在军事、航空航天、地质勘探、环境监测等领域有着广泛的应用。
合成孔径雷达技术的基本原理是利用雷达发射信号与目标反射回来的信号之间的相对运动,通过对多个回波信号进行叠加处理,实现高分辨率的成像。
相对于传统雷达,合成孔径雷达不需要像传统雷达一样依赖于电磁波的波束扫描来进行探测,而是通过在距离和方位方面进行序列化的接收,使接收孔径长度远大于发射孔径长度,从而实现较高分辨率的成像。
合成孔径雷达成像的核心技术是信号处理和图像重建。
信号处理主要包括多普勒补偿、距离校正、视角效应校正等步骤。
多普勒补偿用于消除目标回波信号因相对速度引起的频率偏移,距离校正用于纠正由于平台高度变化引起的距离偏差,视角效应校正用于补偿因角度变化所引起的干涉效应。
经过信号处理后,可以得到目标回波信号的相位信息和强度信息。
在图像重建中,采用了一种被称为反向合成孔径雷达(Inverse Synthetic Aperture Radar,简称ISAR)的技术。
ISAR通过将雷达回波信号变换到频域,然后应用逆变换恢复成时域信号,从而实现图像的重建。
ISAR技术主要依赖于高分辨率的目标运动,通过目标在回波信号中的频率调制提供有关目标的细节信息。
通过对多个回波信号进行叠加和相位编码,可以获得高分辨率的目标图像。
合成孔径雷达成像技术具有许多优点。
首先,它可以实现在任意天气条件下对地面目标进行成像,不受光线、云层等地气条件的影响。
其次,合成孔径雷达可以产生高分辨率的成像结果,对于目标进行细节分析和精确定位具有重要意义。
此外,合成孔径雷达还可以实现夜间成像和全天候监测,具有广泛的应用前景。
合成孔径雷达成像技术在军事领域有着重要的应用。
机载sar成像原理
机载sar成像原理机载合成孔径雷达(SAR)是一种通过飞机或卫星上的雷达系统进行成像的技术。
它利用雷达波束的运动来合成一个大孔径,从而获得高分辨率的图像。
机载SAR成像原理基于雷达的回波信号,通过分析回波信号的相位和幅度信息,可以获取地表目标的位置、形状和散射特性。
机载SAR系统由发射机、接收机、天线和数据处理单元组成。
发射机产生一系列脉冲信号,并通过天线发射出去。
当这些脉冲信号遇到地表目标时,一部分信号被目标散射回来,称为回波信号。
接收机接收到回波信号,并将其传送到数据处理单元进行处理。
机载SAR成像原理的关键在于波束的合成。
波束是指雷达发射出的一束电磁波,它的方向和形状决定了成像的范围和分辨率。
机载SAR系统通过改变飞机或卫星的运动状态,使得波束在不同位置上扫描地表目标。
通过记录每个位置上的回波信号,可以合成一个大孔径,从而获得高分辨率的图像。
在机载SAR成像过程中,需要考虑多种因素。
首先是雷达波束的形状和方向。
波束的形状可以是圆形、椭圆形或矩形,而波束的方向可以是正向、逆向或侧向。
不同的波束形状和方向对成像结果有着不同的影响。
其次是雷达波的频率和极化方式。
频率决定了雷达波的穿透能力和分辨率,而极化方式则决定了回波信号的散射特性。
最后是地表目标的散射特性。
不同的地表目标对雷达波的散射特性不同,这也会影响到成像结果的质量。
机载SAR成像原理的应用非常广泛。
它可以用于地质勘探、环境监测、军事侦察等领域。
通过机载SAR技术,可以获取到地表目标的高分辨率图像,从而提供了重要的信息支持。
例如,在地质勘探中,可以利用机载SAR技术来探测地下矿藏的位置和规模;在环境监测中,可以利用机载SAR技术来监测海洋污染和森林覆盖变化;在军事侦察中,可以利用机载SAR技术来获取敌方目标的情报。
机载SAR成像原理是一种通过飞机或卫星上的雷达系统进行成像的技术。
它利用雷达波束的运动来合成一个大孔径,从而获得高分辨率的图像。
合成孔径雷达成像技术及应用分析
合成孔径雷达成像技术及应用分析摘要:合成孔径雷达是一种新体制雷达,具有全天候工作、穿透地表、高分辨率等独有特点,使其广泛应用于军民领域。
本文介绍了合成孔径雷达的成像原理,剖析了其关键技术及实现方法,并结合应用现状对其未来发展趋势进行了分析。
关键词:合成孔径雷达;信号处理;发展趋势合成孔径雷达(SAR)是利用合成孔径原理、脉冲压缩技术和数字信号处理方法,以真实的小孔径天线获得距离、方位双向高分辨率遥感成像的雷达系统,通常安装在飞机、卫星等平台上,不受光照和气象条件限制,可在能见度极低的情况下得到类似光学照相的雷达图像,具有全天时全天候工作、穿透云雾和植被、低频段穿透地表、分辨率高等优点。
合成孔径的概念始于20世纪50年代初期,首次使用是在50年代后期装配在RB-47A和RB-57D 战略侦察机上。
一、合成孔径雷达的工作原理用一个小天线作为单个辐射单元,将此单元沿一直线移动,在不同位置上接收同一地物的回波信号并进行相关解调压缩处理,一个小天线通过“运动”方式就合成一个等效“大天线”,可以得到较高的方位向分辨率。
合成孔径雷达工作时按一定的重复频率收发脉冲,真实天线依次占一虚构线阵天线单元位置,把这些单元天线接收信号的振幅与相对发射信号的相位叠加起来,便形成一个等效合成孔径天线的接收信号。
合成孔径雷达工作原理示意图地物的反射波由合成线阵天线接收,与发射载波作相干解调,并按不同距离单元记录在照片上,然后用相干光照射照片便聚焦成像。
相参性是合成孔径雷达系统获得高分辨率的必要条件,发射信号、本振电压、相参震荡电压和定时器的触发脉冲均由同一基准信号产生,接收机也需要具备很高的时间精度。
二、合成孔径雷达关键技术(一)数字信号处理技术。
影响合成孔径雷达性能的关键因素是数据处理速度,因为SAR需要存储大量雷达回波,并对一定时间间隔内的信号进行相干积累和实时解算,对数据容量、读写速度、运算方法等都提出了较高的要求,而且探测区域越大、分辨率越高,信息量就越大,对数据处理的要求也就越严格。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
西安电子科技大学
硕士学位论文
机载合成孔径雷达成像及定位
姓名:裘磊
申请学位级别:硕士
专业:信号与信息处理
指导教师:保铮;邢孟道
20060101
第三章合成孔径雷达成像算法
这一小节,假设上述条件满足。
R(t勰)=厢*凡+等(3.13)对最近距离为RB的点目标P,其斜距与0的关系
式中,矿为载机速度,第二项为距离弯曲,在本小节的例子中,它对合成孔径期间的回波包络移动可以忽略,即R(t。
;如)*如,但对回波相位的影响必须考虑。
基于上述情况,将式(3.13)代/X式(3.12),距离快时间.方位慢时间域信号可写成
撕耻彳s十舻一争卜,斗,等(凡+警]]@·Q
即回波包络在二维平面里为一直线,不存在距离与方位向的耦合,从而使方位向的匹配滤波处理简化。
这时方位向匹配滤波的系统匹配函数为
屯“;RB)=4,“)expH兀‰隅)f:】(3.15)其中,多普勒调频率为
‰(吒)=一专,一(3.16)和距离脉压一样,方位向脉压也可在多普勒域进行,脉压后的输出为
s(i,0;RB)=IFFL{FFTf矗【J驴,t。
;岛)】·Fvr,.is。
(f,;RB)】)(3.17)若方位窗函数也是矩形,则上式可写成
畦“焉):csinc{蜕卜一三垒阽illc∽tm)(3.18)
LLoJJ
式中,蜕为多普勒带宽。
可见,对距离徙动不考虑的情况,接收的二维信号成为二维可分离的,通过简单的在距离和方位向分别进行线性调频信号的匹配滤波,就可实现对场景的二维成像。
下面图3.4为加拿大航天局发射的Radarsal-1卫星由该算法实测成像结果,分辨率大约为10×10m,图左侧为海洋,一条河流由右向左流入海洋,最右端为
图3.4Radarsat-!卫星成像图
第三章合成孔径雷达成像算法
图3.7某研究所3rex3m的机载场景图像
§3.4频域校正距离走动和弯曲的距离·多普勒算法
对于第③种情况,这时距离和方位是存在耦合,一般采用多普勒域解耦合方法,最常用的仍是R-D算法,但我们又将这种情况分为小斜视和大斜视两种情况,现在我们先讨论小斜视情况下的算法一频域校正距离走动和弯曲的距离-多普勒算法。
其实,将录取数据从慢时间(‘)域变换到多普勒(正)域,更有利于作上述处理,因为平行于航线上的点目标,其回波响应沿航线具有平移不变性,即在多普勒域里具有相同的响应曲线,只是在多普勒谱里用不同的线性相位标志各自的横向位置。
通常对不同垂直距离(%)的点目标,其响应具有空变性,这通常也可以用如作为参数在响应关系式里表示出来。
1)距离徙动与多普勒的关系
前面讨论雷达至点目标的斜距R时均以横距(或慢时间)为自变量,如R(t。
;如)=√胄:+(以-x)2=√《+(以一‰)2,式中如、以为点目标的垂直距离和横坐标,y,x为雷达载机速度和f。
时刻的横向位置。
回波的多普勒五=2矿,兄·sinO,其中口为斜视角。
令厶垒2矿,五,即位于载机正前方点目标的回波的多普勒(最大多普勒),于是斜视角可写成
sinO=fo|fMQ.33)
一跨=陌(3.34)
而以五为自变量的斜距足∽,如)
毗㈥地/础碣/F丽静镰【l+吾(五/厶)2】(3.35)
最后一个等式应用了LI/k远小于1的近似条件,在斜视角口较小时,这一近
机载合成孔径雷达成像及定位
图3.8频域校正距离走动和弯曲的算法流程
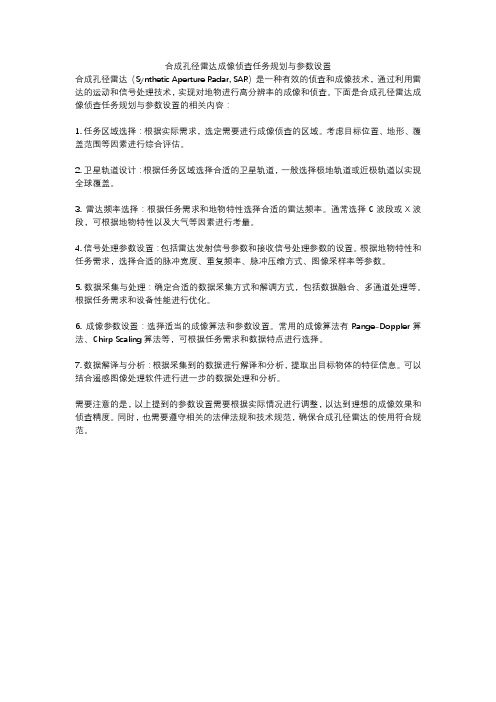
以下图3.9为运用该算法所得到的3m×3m的机载场景图像,天线方位孔径为D=0.4m,对应方位向波束宽度为1.28660,雷达发射LFM信号,频带宽度B=80M,脉冲重复频率5000I-Iz,载机飞行速度约为114m/s。
仔细观察可发现该场景为图3.7场景的时代变迁,在图3.7场景的基础上新增盖了大片房屋,同时我们发现同为3m×3m分辨率的场景,图3.8比图3.7的整体质量提高很多,虽然由于飞机雷达条件越来越好,但算法在其中起了大部分作用,这说明由于即考虑距离走动又考虑距离弯曲的算法复杂度和计算量比单纯只考虑距离走动的算法大很多从而在时间上多余的消耗,是值得的。
图3.9某研究所3m×3m的机载场景图像
§3.5时域校正线性距离走动并频域校正弯曲的距离一多普勒算法
上一小节讨论了距离徙动需要考虑,而相对距离徙动可以忽略的情况,主要是在频域校正距离徙动,适用于正侧视或小斜视的场合。
这一节将算法推广到距离徙动情况相同,而斜视角较大的情况。
这时对距离徙动的校正分两步进行:首先在时域校正掉距离走动的主要部分,然后转到距离频率.方位频率(多普勒)
弯曲了,然后通过第二步来校正距离弯曲。
之所以没有完全采用前一节的全
都在频域进行全部距离徙动的校正和压缩的方法,是因为在成像处理中我们通常采用方位分段(分孔径)处理,分段校正的成像方法。
图3.1l给出了校正线性距离走动和距离弯曲的R-D成像算法的整个流程。
以下图3.12为运用该算法所得到的3m×3m的黄河区域场景图像,包括鱼塘,黄河,黄土丘陵等,水面反射为黑色,天线方位孔径为D=0.4m,对应方位向波束宽度为1.28660,天线斜视角大概为2妒雷达发射LFM信号,频带宽度B=80M,脉冲重复频率5000Hz,载机飞行速度约为114m/s。
图3.12某研究所3mX3m斜视200的机载场景图像
§3.6线频调变标(CS,ChirpScaling)算法伫田
对于第④种情况,一般发生在波长较长或分辨率要求很高时,机载P波段SAR属于这种情况。
这时距离和方位同样存在耦合,且距离徙动是空变的,即由距离弯曲引起的耦合部分在条带场景内是变化的,这时的多普勒域解耦合算法要具有位移修正量随纵向距离而改变的功能,常用的主要有线频调变标(cs,ChiI,pScaling)类算法和距离走动算法(RMA)。
由于论文篇幅所限,我们这里只讨论正侧视时的线频调变标算法。
合成孔径雷达正侧视工作时,距离徙动主要是距离弯曲,考虑距离弯曲的影响,而忽略场景中距离弯曲差的算法已经在上两小节里介绍过。
在这一节里,我们将讨论距离弯曲差不能忽略的情况,即场景纵深沿距离弯曲的空交性必须考虑。
采用这种方法时,点目标回波应保持为线频调(LFM)信号,它的原理基于大时间带宽积的LFM信号(SAR里总是采用这样的信号)容易实现小的时移,这时只需将LFM信号的中心频率作小的频移即可。
如图3.13所示,其图中上面的实线表示原始的LFM信号,而下面的曲线表示它脉压后的波形。
图中的点线和虚线分别表示原始LFM信号的中心频率分别上移和下移矿的LFM波形。
而下图中的点线和虚线的脉冲分别表示两者脉压后的波形,脉冲波形与原始的基本相同,而有+:,f/r和一8f/r的时移,其中,,为LFM信号的调频率。
这可以作如
第三章合成孔径雷达成像算法
以下图3.16为运用CS算法所得到的3mX3m的机载阎良机场场景图像,天线方位孔径为D=I.2m,对应方位向波束宽度为9.54930,雷达发射LFM信号,频带宽度B=50M,脉冲重复频率500Hz,载机飞行速度约为113m/s。
图3.16某研究所3rex3m的阎良机场场景图像
以上通过我在研究生期间所参与项目所得到的SAR图像为例,大概的介绍了基础的RD算法和它在不同情况下的变形,以及经典的CS算法。
除了这些算法,还有很多种其它算法适用于其它情况,在这里就不再一一举例了。
在下一章里我将介绍对图像质量提高的方法和讨论对图像中的目标点如何定位的问题。
机载合成孔径雷达成像及定位
的峰值,比较得实线峰值是由虚线峰值中分出的,显现出副瓣干扰下的各独立点,主副瓣也比得到明显提高。
由此可知,空间变迹算法对SAR图像中的旁瓣相消是非常有效的。
(a)
(c)
圈4.6空问变迹法实际教据试验
§4.2目标点的定位
在前一节我们讨论了成像后处理的图像质量的提高方法,这为图像场景中的目标点定位打下坚实的基础。
当今国际形式风云变换,自然灾害频繁,在现代战争和抗险救灾的环境中,必须争分夺秒,如果能在成像场景中第一时间对目标进行精确定位就是赢得时间,对决定战争的胜负和挽救人民的生命财产损失有着不可估计的贡献。
为了及时对发现的点目标进行定位,本节针对正侧视和小斜视情况下的成像算法提出SAIL成像场景中的点目标经纬度的计算方法,并就该方法的精确性进行参数估计和试验研究。