合成孔径雷达图像特征
雷达成像技术(保铮word版)第四章 合成孔径雷达
第四章 合成孔径雷达合成孔径雷达(Synthetic Aperture Radar ,简称SAR )是成像雷达中应用最多,也是本书讨论的重点。
在前几章对雷达如何获取高的距离分辨率和横向分辨的基础上,从本章开始用三章的篇幅对合成孔径雷达作较详细的讨论。
首先,结合工程实际介绍合成孔径雷达的原理。
在前面的讨论中已经提到,根据不同的要求,成像算法(特别是横向成像算法)有许多种,本章只介绍最简单的距离-多普勒算法的原理,目的是由此联系到对合成孔径雷达系统的要求以及工程实现方面的问题。
合成孔径雷达通常以场景作为观测对象,它与一般雷达有较大不同,我们将在本章讨论合成孔径雷达有别于一般雷达的一些技术性能和参数。
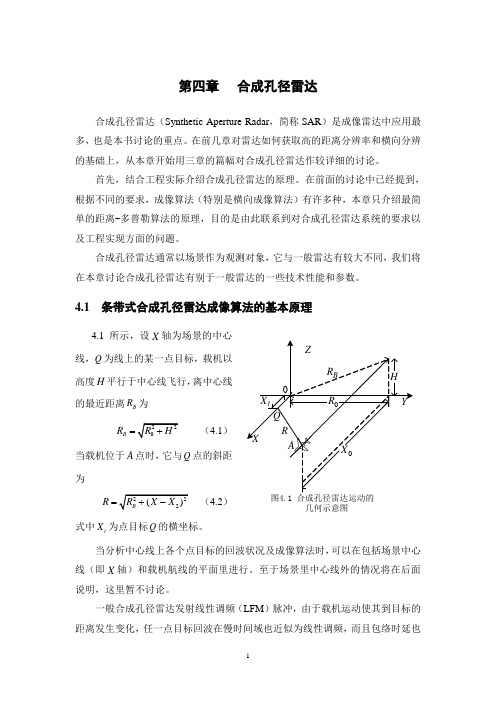
4.1 条带式合成孔径雷达成像算法的基本原理4.1所示,设X 轴为场景的中心线,Q 为线上的某一点目标,载机以高度H 平行于中心线飞行,离中心线的最近距离B R 为B R = (4.1)当载机位于A 点时,它与Q 点的斜距为R = (4.2) 式中t X 为点目标Q 的横坐标。
当分析中心线上各个点目标的回波状况及成像算法时,可以在包括场景中心线(即X 轴)和载机航线的平面里进行。
至于场景里中心线外的情况将在后面说明,这里暂不讨论。
一般合成孔径雷达发射线性调频(LFM )脉冲,由于载机运动使其到目标的距离发生变化,任一点目标回波在慢时间域也近似为线性调频,而且包络时延也几何示意图随距离变化,即所谓距离徙动。
合成孔径雷达成像算法的任务是从载机运动录取得到的快、慢时间域的回波数据,重建场景图像,它是二维匹配滤波问题。
严格考虑距离徙动的成像算法比较复杂,在实际应用中,一般均根据情况采用一些较简单的算法,这些将在第五章里系统介绍。
在这里我们主要讨论分辨率较低,距离徙动影响可以忽略的最简单的情况,这时可采用简易的距离-多普勒基本算法。
所谓距离徙动的影响可以忽略不计是指雷达波束扫过某点目标的相干处理时间里,目标斜距变化引起的距离徙动值小于距离分辨单元长度的1/4~1/8,即场景中心线上所有点目标的回波(距离压缩后的)在慢时间域里均位于同一个距离单元。
合成孔径雷达图像目标识别技术研究

合成孔径雷达图像目标识别技术研究合成孔径雷达图像目标识别技术研究摘要:合成孔径雷达(Synthetic Aperture Radar,SAR)是一种通过感知目标反射或散射的雷达技术。
在航天、军事、环境监测等领域都有着重要的应用价值。
本文旨在对合成孔径雷达图像目标识别技术进行研究,包括图像预处理、特征提取和分类方法。
通过实验验证了这些方法的有效性和可行性,为进一步的相关研究提供了参考。
1. 引言合成孔径雷达(SAR)是一种能够获取高分辨率地面目标信息的雷达技术。
由于其具有无视天候、全天候工作和穿透隐蔽物等优势,因此在军事侦察、环境监测、资源勘探等领域得到了广泛应用。
目标识别作为SAR图像处理的重要环节之一,对于提取目标特征、辨识目标类别具有重要意义。
2. 合成孔径雷达图像预处理合成孔径雷达图像在获取过程中会受到多种干扰因素的影响,如地物散射、方向模糊等。
因此,为了提高目标识别的准确性,需要对SAR图像进行预处理。
预处理主要包括去噪、图像增强和几何校正等步骤。
2.1 去噪由于SAR图像在采集过程中会受到天气等因素的干扰,导致图像中出现噪声。
噪声对目标识别造成很大的困扰,因此需要进行去噪处理。
常用的去噪方法包括中值滤波、小波去噪等。
2.2 图像增强图像增强的目标是提高图像的对比度和清晰度,使得目标在图像中更加鲜明。
在SAR图像中,由于环境等因素的限制,图像质量较差。
常用的图像增强方法包括直方图均衡化、自适应直方图均衡化等。
2.3 几何校正由于SAR图像在获取过程中会有不同的几何失配问题,如斜视几何失配、散焦几何失配等。
为了进行精确的目标识别,需要对图像进行几何校正。
几何校正方法包括校正变换、几何失配校正等。
3. 合成孔径雷达图像特征提取特征提取是目标识别的关键步骤之一。
通过提取图像的特征信息,可以判断目标的类别以及与其他目标的差异。
常用的特征提取方法包括空间域特征、频率域特征和小波域特征等。
3.1 空间域特征空间域特征是通过对图像的像素进行分析提取的,包括灰度特征、形状特征等。
合成孔径雷达

欧空局(ESA)
欧空局分别于1991年7月和1995年4月,发射了欧洲遥感卫星(European Remote Sensing Satellite, ERS) 系列民用雷达成像卫星:ERS-1和ERS-2,主要用于对陆地、海洋、冰川、海岸线等成像。卫星采用法国Spot-I和 Spot-Ⅱ卫星使用的MK-1平台,装载了C波段SAR,天线波束指向固定,并采用VV极化方式,可以获得30 m空间分辨率 和100 km观测带宽的高质量图像。Envisat是ERS计划的后续,由欧空局于2002年3月送入太空的又一颗先进的近 极地太阳同步轨道雷达成像卫星。Envisat上所搭载的ASAR是基于ERS-1/2主动微波仪(AMI)建造的,继承了ERS-1 /2 AMI中的成像模式和波束模式,增强了在工作模式上的功能,具有多种极化、可变入射角、大幅宽等新的特性, 它将继续开展对地观测和地球(ESA)
意大利 德国
俄罗斯 加拿大航天局(CAS)
日本 以色列
美国宇航局(NASA)
在Seasat-A取得巨大成功的基础上,利用航天飞机分别于1981年11月、1984年10月和1994年4月将Sir-A、 Sir-B和Sir-C/X-SAR3部成像雷达送入太空。Sir-A是一部HH极化L波段SAR,天线波束指向固定,以光学记录方式 成像,对1000 ×104 km2的地球表面进行了测绘,获得了大量信息,其中最著名的是发现了撒哈拉沙漠中的地下古 河道,显示了SAR具有穿透地表的能力,引起了国际学术界的巨大震动。产生这种现象的原因,一方面取决于被观测 地表的物质常数(导电率和介电常数)和表面粗糙度,另一方面,波长越长其穿透能力越强。Sir-B是Sir-A的改进型, 仍采用HH极化L波段的工作方式,但其天线波束指向可以机械改变,提高了对重点地区的观测实效性。Sir-C/X-SAR 是在Sir-A, Sir-B基础上发展起来的,并引入很多新技术,是当时最先进的航天雷达系统:具有L、C和X3个波段, 采用4种极化(HH, HV, VH和VV),其下视角和测绘带都可在大范围内改变。
【计算机应用】_合成孔径雷达图像_期刊发文热词逐年推荐_20140725
推荐指数 3 1 1 1 1 1 1 1 1 1 1 1 11 1
2013年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37
2009年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27
科研热词 合成孔径雷达 非下采样contourlet变换 合成孔径雷达图像 高度 高分辨率 非子采样contourlet变换 边缘检测 粒子群优化 目标提取 灰色关联分析 模糊熵 机动目标 广义交叉验证 小波阈值去噪 多波段合成孔径雷达图像 多尺度积 图像去噪 图像分割 合成孔径雷迭 区域生长 切片图像仿真 入射角 信息光学 信噪比 伪彩色融合 亮度-色度-饱和度变换 4f系统
2014年 序号 1 2 3 4 5 6 7 8 9 10
2014年 科研热词 推荐指数 非下采样小波(udwt) 1 矩阵转置 1 矩阵分块 1 滑动窗口 1 拉普拉斯(laplace)分布 1 局部性优化 1 多时相合成孔径雷达(sar)图像 1 变化检测 1 snake 模型 1 sar成像并行仿真 1
推荐指数 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2011年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32
2011年 科研热词 合成孔径雷达 hough变换 高速公路检测 高分辨率 非线性权重 边缘特征提取 自聚焦 自动目标识别 纹理特征提取 目标特征 独立分量分析 灰度共生矩阵 海陆分割 活动轮廓模型 水平集 最小二乘 方位角联合估计 方位角估计 支持向量机 提取目标主轴 小波 多级中值滤波 多普勒调频率 图像处理 合成孔径雷达影像 合成孔径雷达图像分类 合成孔径雷达图像 双参数估计 判别熵 主成分分析 主导边界 radon变换 推荐指数 3 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
《合成孔径雷达》课件
总结词:气象观测中的重要手段
总结词:地质勘查中的重要工具详细描述:合成孔径雷达(SAR)在地质勘查中发挥着重要作用,能够观测地表和地下地质结构,提供高分辨率的地质数据,帮助地质学家更好地了解地质构造和资源分布。案例分析:合成孔径雷达在地质勘查中的应用案例包括矿产资源勘查、地震灾害评估、土地利用调查等。例如,在中国西部地区,科学家使用合成孔径雷达对矿产资源进行勘查,发现了大量的煤炭和石油资源。结论:合成孔径雷达在地质勘查中的应用具有重要意义,能够提高地质学家对地质构造和资源分布的了解和勘查准确性。
起源
随着技术的不断进步,合成孔径雷达在分辨率、速度、体积和重量等方面不断优化,应用领域也不断拓展。
发展历程
未来,合成孔径雷达将继续朝着更高分辨率、更小体积、更低成本的方向发展,同时与其他技术如人工智能、物联网等结合,拓展更多的应用场景。
未来展望
02
合成孔径雷达的应用
合成孔径雷达能够穿透云层和伪装,提供高分辨率的战场侦察图像,帮助指挥官了解敌情。
பைடு நூலகம்
气象研究
合成孔径雷达可以用于观测地球表面的地形、地貌、植被等信息,为地球科学研究提供数据支持。
地球观测
通过合成孔径雷达的高清图像,可以发现和识别古代遗址和文物,为考古研究提供新的手段。
遥感考古
03
合成孔径雷达系统组成
03
发射机的性能指标包括输出功率、效率、波形质量等,直接影响着合成孔径雷达的作用距离和分辨率。
THANKS
感谢观看
信号处理包括脉冲压缩、动目标检测、多普勒频率分析等技术,以提高雷达的分辨率、检测能力和抗干扰能力。
信号处理的性能指标包括处理精度、实时性、稳定性等,直接影响着合成孔径雷达的整体性能。
第十二章 合成孔径雷达

w' c
1
w
2w ' 2w ' 2w Ω= f0 = = cosψ c λ λ
26
多普勒频率的微分: 多普勒频率的微分: 的微分
δΩ =
2 w sinψ
λ
δψ
若以 δ 分辨率
表示多普勒频率的分辨率, 表示多普勒频率的分辨率,δψ 表示方位角 的分辨率 λ δψ = δΩ 2 w sinψ
13
日本陆地观测卫星和合成孔径雷达 ★ 日本陆地观测卫星和合成孔径雷达 (PALSAR)
ALOS主要参数 主要参数
发射时间: 发射时间:2006.1.24 太阳同步轨道 卫星高度: 卫星高度:691 km 轨道平面倾角: 轨道平面倾角:98.16° ° 轨道周期: 轨道周期:99 min 循环周期: 循环周期:46 days SAR: : 微波波段: 微波波段:L (1.27 GHz) 极化方式: 极化方式:多极化
19
某一波 某一波源发出的声波频率为 f,波长为 λ; , ; 声波传播速度 v
1 v f = = T λ
20
多普勒效应三种情况
1. 观察者静止,波源相对于 观察者静止, 媒质运动
波源以速度v 波源以速度 s接近观察者 v SS ' = vs × T = s 经过时间T(波周期):
f
波源运动速度v 波源运动速度 s背离观察者 波长和频率分别为
12
成像模式提供的七种不同入射角的图像参数 成像模式提供的七种不同入射角的图像参数
成像 幅宽 公里) 位置代号 (公里) IS1 IS2 IS3 IS4 成像模式 IS5 IS6 IS7 105 105 82 88 64 70 56 与星下点的 距离 公里) (公里) 187 - 292 242 - 347 337 - 419 412 - 500 490 - 555 550 - 620 615 - 671 入射角范围 (度) 15.0 - 22.9 19.2 - 26.7 26.0 - 31.4 31.0 - 36.3 35.8 - 39.4 39.1 - 42.8 42.5 - 45.2
合成孔径雷达遥感原理及应用简介(二)
与聚焦系统比较 ,发现非聚焦系统的分辨率与波
长 、斜距相关 ,而聚焦的结果则与波长 、斜距无关 ,仅与
天线孔径有关 。
典型的星载系统 :l~10m λ, ~10cm , Ro ~103 Km 。 采用真实孔径雷达系统 , rar ~5000m ;若采用非聚焦合 成孔径雷达系统 ,结果 rapu ~200m ,仍无法满足实用需 求 ;采用聚焦的合成孔径雷达系统 ,结果为 5m 。
(2) 多普勒波束锐化的观点
①聚焦的多普勒波束锐化方法
最初的合成孔径雷达是由 Carl Wiley 于五十年代
初为军方研制的 ,成果处于保密状态达十多年 ,直到六
十年代后期才解密 。虽然五十年代后期就开始使用
“合成孔径”一词 ,但 Wiley 当时研制的却是叫作多普勒
波束锐化器的装置 。
如图 9 所示 ,雷达飞行速度为 u ,高度为 h ,沿 X 轴
飞行 , 距原点 x r , 雷达位置为 ( x r , O , h) , 目标位置为 ( xt , yt , O) 。波束的半功率等值线为椭园 , 即角度分辨
范围实际上是个窄的扇形波束 。沿航迹方向 , 波束宽度
为βh ,围绕目标的多普勒频率间隔 Δf D 等于多普勒滤 波器带宽 B Df 。
目标的多普勒频率为 f Dt = - 2 u ( X r - Xt) / (λR) ,
越大 ,因而最终聚焦的合成孔径雷达方位分辨率与斜
距无关 。
②非聚焦的合成孔径雷达
上面介绍的合成孔径雷达各阵元信号需进行相位
补偿 ,以便严格进行同相相干叠加 。这种方案大大改
善了方位分辨率 ,但实现的代价也很大 ,设备和算法复
杂 。实践中人们提出一种折衷方法 : 非聚焦的合成孔
高精度合成孔径雷达图像分类算法仿真
Cl a s s i ic f a t iБайду номын сангаасo n Al g o r i t h m S i m ul a t i o n
LU L i n g . LI U Yi —b 0
( 1 .C o l l e g e o f C o m p u t e r S c i e n c e a n d E n g i n e e i r n g ,C h o n g q i n g U n i v e r s i t y o f T e c h n o l o g y , C h o n g q i n g 4 0 0 0 5 0 ,C h i n a ; 2 .N a v y E n g i n e e i r n g D e s i g n I n s t i t u t e o f S o u t h C h i n a , Z h a  ̄i a n g G u a n g d o n g 5 2 4 0 0 3 , C h i n a )
波特征 、 纹理特征等 多特征 , 由于原始特征数 目过多 , 并且采集特征 伴随巨大 的随机 性 , 几乎不能建立 多 目标描述模 式。传 统的图像分类方法面临多特征 、 强随机性的特征集合 时 , 因为无 固定化的特征约束 , 导致分类效果不好 的问题 。为了避免上 述缺陷 , 提 出了一种基于最优分类平面 的合成孔径雷达图像 分类算法 。利用局部二 值模式纹理分析方 法, 进行合 成孔 径雷 达 图像特征提取 , 为图像 分类提供 准确 的数据基础。利用最优分类平面方法 , 实现合成孔径雷达 图像 的分类 。实 验结果表
s y n t h e t i c a p e r t ur e r a da r i ma g e c l a s s i ic f a t i o n a l g o r i t h m ba s e d o n t he o p t i ma l c l a s s i ic f a t i on p l a ne . Us i n g l o c a l bi n a r y p a t t e r n t e x t u r e a na ly s i s me t ho d,s y nt h e t i c a p e r t u r e r a d a r i ma g e f e a t u r e wa s e x t r a c t ed f o r i ma g e c l a s s i ic f a t i o n t o p r o v i d e
合成孔径雷达的图像判读要点分析
合成孔径雷达的图像判读要点分析发布时间:2022-06-16T01:14:54.658Z 来源:《科学与技术》2022年2月4期作者:杨彬彬[导读] 合成孔径雷达的具有强大的监测功能,杨彬彬( 河北邢台 ) 054000 摘要:合成孔径雷达的具有强大的监测功能,在工业领域、国防领域被广泛应用。
该技术应用具有高分辨率,对气候环境的适应性比较强,在应用过程中将尺寸比较小的天线孔径进行合成,实现合成孔径雷达的制作与应用。
本文对合成孔径雷达应用过程中的图像特点分析,发现其在图像判读应用上仍具有广泛的进步空间,因此,本文提出提高合成孔径雷达图像判读的对策,分析其具体的应用范围。
关键词:合成孔径雷达;雷达图像;工作原理;目标识别引言:雷达通过发射和接收电磁波的方式对物体信息进行检测,在目标行为、形态勘察上被广泛应用,且具有高效优势。
合成孔径雷达的应用具有强大的成像功能,其主要分辨率较高、穿透性较强的雷达实现对目标的识别与成像,目前,该类雷达通常被搭载在卫星或者飞机上,可以实现大范围的覆盖应用,通过搭载物体的移动合成孔径,并成像。
一、合成孔径雷达的工作原理与普通的雷达工作原理相同,通过对电磁波信号的发射与回收,测定与被检测对象之间的距离,并根据脉宽窄实现对检测对象形体的成像。
合成孔径雷达采用相对运动的方式将信号相位进行重叠,将接收信号的空间扩大。
经过数据处理之后,其尺寸与天线雷达相似。
合成孔径雷达主要通过搭载飞机或者卫星等时刻处于移动状态的物体,通过估计运行进行距离测量和成像,根据光学系统应用原理,通过透镜或者反射镜的方式形成图像[1]。
合成孔径雷达在成像的过程中,采用真实孔径侧视雷达的分辨率检测方式。
距离分辨率形成根据电磁波的传播速度、雷达的脉冲宽度、持续时间等进行计算。
合成孔径雷达会因多普勒效应产生方位分辨率,主要根据雷达的孔径长度、探测点距离、电磁波波长等参数,对方位分辨率进行确定和计算。
多普勒效应由雷达的相对运动产生,接收频率与波源频率存在差别,从而产生多普勒效应。
《合成孔径雷达原》课件
contents
目录
• 合成孔径雷达简介 • 合成孔径雷达工作原理 • 合成孔径雷达系统组成 • 合成孔径雷达性能参数 • 合成孔径雷达技术前沿与发展趋势
01
合成孔径雷达简介
合成孔径雷达的定义
合成孔径雷达是一种利用雷达与目标 之间的相对运动,通过信号处理技术 实现高分辨率成像的主动式微波传感 器。
精度
雷达的定位精度取决于多种因素,如信号处理算法、接收机 性能和大气条件等。高精度雷达对于目标跟踪和识别至关重 要。
03
合成孔径雷达系统组成
发射机
功能
产生雷达发射信号
关键参数
发射信号的频率、脉冲宽度、重复周期等
作用
将电磁能量转换为雷达发射信号,提供目标照射 能量
接收机
功能
接收反射回来的信号
关键参数
02
合成孔径雷达工作原理
雷达发射信号与接收
雷达发射信号
合成孔径雷达通过发射电磁波信 号来探测目标。这些信号可以是 调频连续波或脉冲信号,具体取 决于雷达型号和应用场景。
信号接收和处理
发射的信号遇到目标后会被反射 回来,被雷达接收。反射信号会 携带有关目标位置、距离、速度 和形状等信息。
信号处理与成像
信号处理
接收到的原始信号需要经过一系列的 信号处理技术,如滤波、放大、混频 和去调频等,以提取有用的信息。
成像算法
处理后的信号通过成像算法转换为图 像,这些算法包括傅里叶变换、逆合 成孔径雷达成像等。
分辨率与精度
分辨率
合成孔径雷达的分辨率取决于发射信号的波长、天线尺寸和 目标距离。分辨率越高,图像中能够分辨出的细节越多。
关键参数
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
地物目标在像平面上的位置取决于目标与雷达天线之间的距离
光学与SAR成像差异,地形起伏引起的位移方向相反 (Copyright, CCRS)
Incident Angle(入射角)
(Nominal) Incident angle (名义入射角)
--angle between the radar illumination and the normal to the ground surface. (雷达入射方向和地面法线的夹角) -- the incident angle increases from the near range to the far range (雷达图像的近距到远距,入射角增大)
第三章 Characteristics of SAR Images(合成孔径雷达图像特征)
SAR Imaging - Slant Range Projection (斜距投影)
Antenna
像平面
e fg
R H
Nadir
Y
E
F G Across track
The location of pixels in the image plane is dependent on the slant ranges between the antenna and the ground objects
i
局部入射角增大时,透 视收缩减弱;当到90度
时,透视收缩消失,但
阴影出现
displacement foreshortening
Diagram of Shadow (阴影)
雷达波没有照射到 的地方
没有回波,暗色调
i
高目标的背面容易 出现阴影
Shadowing
局部入射角增大时, 阴影变严重
(Courtesy: CCRS)
ERS-2 image, incidence angles between 24°to 26°
RADARSAT image, incidence angle between 41° and 44°
(Acknowledgement: H. Rott, University of Innsbruck.)
Better discrimination of scene targets 目标识别 Easier (automatic) image registration 影像匹配 Easier (automatic) image segmentation 图像分割 …
Speckle suppression(斑点抑制)
Sketch map of joint contribution(综合贡献示意图)
Fading and speckle(衰退和斑点)
Fading is the variation of amplitude of total radar echo wave (衰退之总雷达回波幅度的变化)
Speckle refers the constructive (相长) and destructive(相消) interference of radar echo waves, appearing in the image as bright or dark (斑点指雷 达回波的相长或相消叠加,在影像上表现为明或 暗)
Courtesy of CCRS
Courtesy of CCRS
为什么要削弱斑点噪声
The presence of speckle noise must be considered before further analysis
Reduction of speckle noise allow:
Local incident angle(局部入射角)
-- angle between the radar LOS and the line normal to the local slope. (雷达入射方向与局部坡度法线的夹角)locii
Incident angle(入射角)
Local incident angle(局部 入射角)
Example of radar shadow effects under large incidence angle (>45°) illumination. (Copyright, CCRS)
Diagram of Layover (叠影)
目标上部的回波比底部 的回波先到达接收天线
目标的顶部发生位移, 相对与底部倒置
Radiometric Characteristics of SAR Image (辐射特征)
Fading(衰退)
Speckle(斑点)
Fading and speckle(衰退和斑点)
Fading and speckle are the inherent “noise-like” processes in a coherent imaging system (衰退和斑 点是相干成像系统固有的噪声过程)
Geometric Characteristics of SAR Imaging (几何特征)
Foreshortening(透视收缩)
Radar shadow(雷达阴影)
Layover(叠影)
Diagram of Foreshortening(透视收缩)
地形特征压缩.
斜坡面与雷达入射方向 正交(局部入射角为0) 时,透视收缩最严重
Radar total echo wave in a resolution cell is the joint contribution of echo wave from different small scatters within the resolution cell.(分辨单元的雷 达回波是分辨单元内小散射体回波的综合贡献)
i
叠影是透视收缩的极端 情况
layover
名义入射角小时,叠影 更显著
Exercise: 区分几何形变?
Understanding geometric distortions from local incident angle 理解几何形变
强
弱强
弱弱
强
叠影 00
透视收缩 900
阴影
局部入射角