北京航空航天大学《931自动控制原理综合》历年考研真题(含部分答案)专业课考试试题
全国名校自动控制原理考研真题汇编(含部分答案)
2013年中国 学技术大学848 动控制原理
2014年中国 学技术大学848 动控制原理
5.北京
天大学 动控制原பைடு நூலகம் 合
2012年北京
天大学931 动控制原理 合
2013年北京
天大学931 动控制原理 合
2014年北京
天大学931 动控制原理 合
6.山东大学 动控制原理
2016年山东大学847 动控制原理(含现代控制理 )
8.其他院校自动控制原理考研 真题(含部分答案)
2010年华中科技大学829自动控制原理考研真 题及答案
2011年南京大学961自动控制原理考研真题
2011年重庆大学839自动控制原理一考研真题
2013年厦门大学844自动控制原理考研真题
2013年华南理工大学813自动控制原理考研真 题
2014年华南理工大学813自动控制原理考研真 题
2015年华南理工大学813自动控制原理考研真 题
2016年华南理工大学813自动控制原理考研真 题
2017年华南理工大学813自动控制原理考研真 题
2018年华南理工大学813自动控制原理考研真 题
2012年电子科技大学839自动控制原理考研真 题及详解
参 案:
2013年电子科技大学839自动控制原理考研真 题及详解
参 案:
2014年电子科技大学839自动控制原理考研真 题
4.中国科学技术大学自动控制 原理考研真题
2013年中国科学技术大学848自动控制原理考 研真题
6.山东大学自动控制原理考研 真题
2016年山东大学847自动控制原理(含现代控 制理论)考研真题
2017年山东大学847自动控制原理(含现代控 制理论)考研真题
自控考研真题、答案与详解
0)点可得:
20lg K = 0 ⇒ K = 1
转折处加入了一个二阶振荡环节,则开环传递函数可设为:
G(s) = 1 ⋅
ωn2
s s2 + 2ζωn s + ωn2
由转折点可知, ωn = 10rad/s 。
振荡环节在 ω = ωn 时的修正值为 −20 lg 2ζ 。由图知,修正值为 −10 − (−20) = 10 ,即:
2
网学天地()出品
版权所有,翻录必究!
−20lg 2ζ = 10 ⇒ ζ = 1 2 10
则传递函数为:
G(s) =
1⋅ s s2
ωn2 + 2ζωn s + ωn2
=
s(s2
+
100 10s + 100)
开环对数相频曲线如图 1-4 所示。
(2)由图可知,在 L(ω)>0dB 的范围内,对应的相频曲线对 −π 线无穿越,即 N+ = 0 ,
分别为输入和输出信号 u(t) 和 y(t) 的拉普拉斯变换。
解:由 L−1(sI − A)−1 = eAT ,可得:
(sI
−
A)−1
=
L(e AT
)
=
L
⎡e−t + te−t
⎢ ⎣
−te−t
te−t e−t − te−t
⎤ ⎥ ⎦
=
⎡ ⎢ ⎢ ⎢ ⎢⎣
s
1+ +1 −
(s
1 (s + 1)2
1 + 1)2
s3 1 10
s2 11 10
s1 100/11 0
s0 10 第一列系数均大于 0,故系统稳定。
系统稳定,输入信号拉氏变换为 R(s) = 1 ,故由输入信号引起的误差象函数在 s 右边平面 s2
2015年北京航空航天大学控制工程考研、复试真题、复试笔记、复试指导、复试经验、真题解析、考研动态

北航考研详解与指导一、考试组成自动控制原理占90分;数字电路占60分;二、自动控制原理部分的考试大纲(一)复习内容及基本要求1.自动控制的一般概念主要内容:自动控制的任务;基本控制方式:开环、闭环(反馈)控制;自动控制的性能要求:稳、快、准。
基本要求:反馈控制原理与动态过程的概念;由给定物理系统建原理方块图。
2.数学模型主要内容:传递函数及动态结构图;典型环节的传递函数;结构图的等效变换、梅逊公式。
基本要求:典型环节的传递函数;闭环系统动态结构图的绘制;结构图的等效变换。
3.时域分析法主要内容:典型响应及性能指标、一、二阶系统的分析与计算。
系统稳定性的分析与计算:劳斯、古尔维茨判据。
稳态误差的计算及一般规律。
基本要求:典型响应(以一、二系统的阶跃响应为主)及性能指标计算;系统参数对响应的影响;劳斯、古尔维茨判据的应用;系统稳态误差、终值定理的使用条件。
4.根轨迹法主要内容:根轨迹的概念与根轨迹方程;根轨迹的绘制法则;广义根轨迹;零、极点分布与阶跃响应性能的关系;主导极点与偶极子。
基本要求:根轨迹法则(法则证明只需一般了解)及根轨迹的绘制;主导极点、偶极子等的概念;利用根轨迹估算阶跃响应的性能指标。
5.频率响应法主要内容:线性系统的频率响应;典型环节的频率响应及开环频率响应;Nyquist稳定判据和对数频率稳定判据;稳定裕度及计算;闭环幅频与阶跃响应的关系,峰值及频宽的概念;开环频率响应与阶跃响应的关系,三频段(低频段,中频段和高频段)的分析方法。
基本要求:典型环节和开环系统频率响应曲线(Nyquist曲线和对数幅频、相频曲线)的绘制;系统稳定性判据(Nyquist判据和对数判据);等M、等N圆图,尼柯尔斯图仅作一般了解;相稳定裕度和模稳定裕度的计算;明确最小相位和非最小相位系统的差别,明确截止频率和带宽的概念。
6.线性系统的校正方法主要内容:系统设计问题概述;串联校正特性及作用:超前、滞后及PID;校正设计的频率法及根轨迹法;反馈校正的作用及计算要点;复合校正原理及其实现。
北航933控制工程综合933自动控制原理题解 2014
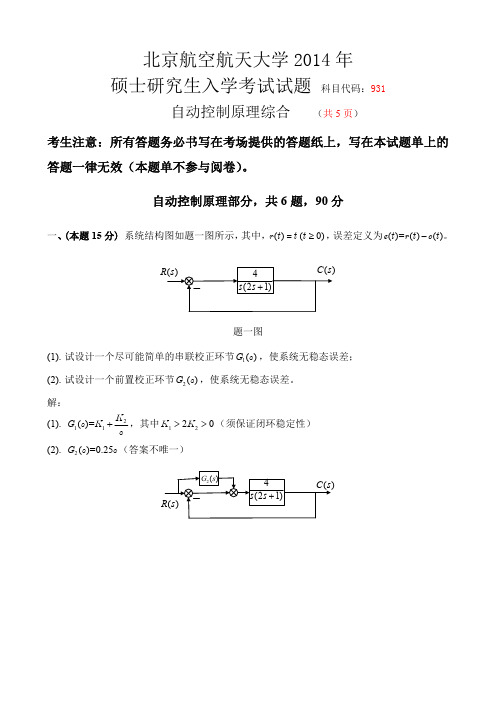
北京航空航天大学2014年 硕士研究生入学考试试题 科目代码:931自动控制原理综合 (共5页)考生注意:所有答题务必书写在考场提供的答题纸上,写在本试题单上的答题一律无效(本题单不参与阅卷)。
自动控制原理部分,共6题,90分一、(本题15分) 系统结构图如题一图所示,其中,()(0)r t t t =≥,误差定义为()=()()e t r t c t 。
题一图(1). 试设计一个尽可能简单的串联校正环节1()G s ,使系统无稳态误差; (2). 试设计一个前置校正环节2()G s ,使系统无稳态误差。
解:(1). 211()=K G s K s,其中1220 K K (须保证闭环稳定性) (2). 2()=0.25G s s (答案不唯一)二、 (本题15分) 已知单位负反馈最小相位系统的开环传递函数渐近对数幅频特性曲线如图所示,讨论开环传递函数G (s ) 的可能形式,绘制概略对数相频特性曲线,并用对数判据分析该闭环系统的稳定性。
解:21000()=(20100)G s s s s ,对数相频特性曲线如下图所示(需向上补画2 )。
1|(10)|=2G j 。
若0.5 ,正负穿越都为0,稳定;若00.5 ,不稳定。
10-110101102103-270-225-180-135-90P h a s e (d e g )Frequency (rad/sec)三、(本题15分) 单位负反馈系统的开环传递函数为*2(4)()(1)K s G s s s 按步骤画出*:0K 时系统的根轨迹图,并确定系统的阶跃响应为振荡衰减过程时*K 的取值范围。
解:1.(1)三条根轨迹,起始于0,-1,-1,终止于-4, , 。
(2)实轴上根轨迹(4,1)(1,0)(3)渐近线21,0,12 ak k ,1 a (4)分离点坐标21114d d d解得3 d (5)与虚轴交点2*(1)(4)0 j j K j解得 *1 K2.将分离点坐标代入闭环特征方程可得相应的*370.0405 K 。
20012004年北京航空航天大学933控制工程综合真题部分答案修正

2004(九)系统动态方程如下100200100101x x u ∙--⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦[]01y a x =其中a 是实常量参数,问1,判断系统是否渐近稳定?为什么?2,参数a 取何值时系统BIBO 稳定?为什么?解答:(1) 100||0101S SI A S S+-=-- 2(1)(1)s s =+-A 阵的特征值1,231,1λλ=-=。
3λ在复平面的右半部,故系统不是渐近稳定。
(2) ()g s =1()C SI A b --2121001()0(1)1(1)(1)01(1)S SI A S S S S S S S S -⎡⎤--⎢⎥-=-++⎢⎥+-⎢⎥++⎣⎦2222100110111011S SS S S S S ⎡⎤⎢⎥+⎢⎥⎢⎥=⎢⎥--⎢⎥⎢⎥⎢⎥--⎣⎦[]2222100121()001001111011S Sg s S S S S S ⎡⎤⎢⎥+-⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥--⎢⎥⎢⎥⎣⎦⎢⎥⎢⎥--⎣⎦222100111aS a S S S -⎡⎤++⎡⎤⎢⎥=⎢⎥⎢⎥--⎣⎦⎢⎥⎣⎦(1)(1)S aS S +=+- 要BIBO 稳定,则()g s 极点具有负实部,上式中含有极点1,故应当将其消去,故a =1- 此时()g s 11S =+ 2001(九)系统动态方程为若()()()()u t 1t ,x 0122T==.求()x t 及()y t .解答: 由题中所给已知条件知:x x bu A =+ ① y=cx ②其中110010000A -⎡⎤⎢⎥=-⎢⎥⎢⎥⎣⎦ , 1b 21⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦, []c 230= 故对①式两边做拉普拉斯变换得()()()()()()()()Sx s x 0x s bu s x s x 0bu s A SI A -=+-=+③又已知()[]Tx 0122=,()()u t 1t = 故()1u s s=代入③式得()1s 00110111x s 0s 001022s 00s 00021-⎛-⎫⎛⎫⎡⎤⎡⎤⎡⎤⎡⎤ ⎪ ⎪⎢⎥⎢⎥⎢⎥⎢⎥=--+ ⎪ ⎪⎢⎥⎢⎥⎢⎥⎢⎥ ⎪ ⎪⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦⎝⎭⎝⎭ 12s 16s+110s 10s+102s 00s 2s+1s -+⎡⎤⎢⎥⎛-⎫⎡⎤⎢⎥+ ⎪⎢⎥⎢⎥=⋅ ⎪⎢⎥⎢⎥ ⎪⎢⎥⎢⎥⎣⎦⎝⎭⎢⎥⎢⎥⎣⎦()2s 3s s 12s 2s+1s +⎡⎤⎢⎥+⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦④[]1101x 010x 2u 0001y 230x -⎡⎤⎡⎤⎢⎥⎢⎥=-+⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦=()()()()1x s x 0bu s SI A -=-+⎡⎤⎣⎦对④式两边做拉普拉斯反变换即得()()()()()()tx t 31t 2e21t 21t t 1t T-=-+将()x t 的表达式代入②式得()()y t 230= , ()()t x t 121t 4e -=-2003(九)由单变量的对象、观测器和状态反馈组合而成的闭环系统。
北京航空航天大学考研专业课资料免费下载
1.北京航空航天大学 1998年数理逻辑与编译技术试题资料下载2.北京航空航天大学 1998年数字与模拟电路试题资料下载3.北京航空航天大学 1991,1999、2001-2002综合考试试题资料下载4.北京航空航天大学 2000年信号与系统试题资料下载5.北京航空航天大学 1999年信号与系统试题资料下载6.北京航空航天大学 2000年数字与模拟电路试题资料下载7.北京航空航天大学 1999年数字与模拟电路试题资料下载8.北京航空航天大学 1999年微波技术试题资料下载9.北京航空航天大学 1999年电路分析试题资料下载10.北京航空航天大学 2000年微波技术试题资料下载11.北京航空航天大学 2001年数据结构试题资料下载12.北京航空航天大学 2002年数据结构试题资料下载13.北京航空航天大学 2002行政管理学试题资料下载14.北京航空航天大学 2002金融联考试题资料下载15.北京航空航天大学 2000年程序设计数据结构试题资料下载16.北京航空航天大学 2000年数理逻辑与编译技术试题资料下载17.北京航空航天大学 2000年电路分析试题资料下载18.北京航空航天大学 2001年程序设计与数据结构试题资料下载19.北京航空航天大学 2002年程序设计与数据结构试题资料下载20.北京航空航天大学 2003企业管理基础试题资料下载21.北京航空航天大学 2003-2005年日语(图片格式)试题资料下载22.北京航空航天大学 2003国际贸易基础试题资料下载23.北京航空航天大学 2003年行政管理综合知识试题资料下载24.北京航空航天大学 2003金融联考试题资料下载25.北京航空航天大学 2003证券投资学试题资料下载26.北京航空航天大学 2004年经济管理基础试题资料下载27.北京航空航天大学 2004年行政管理综合知识)试题资料下载28.北京航空航天大学 2004年证券投资学试题资料下载29.北京航空航天大学 2005企业管理基础试题资料下载30.北京航空航天大学 2004金融联考试题资料下载31.北京航空航天大学传热学2001试题资料下载32.北京航空航天大学 2005年金融联考试题资料下载33.北京航空航天大学信号与系统2001试题资料下载34.北京航空航天大学信号与系统2002试题资料下载35.北京航空航天大学信息类专业综合2004试题资料下载36.北京航空航天大学交通信息类专业综合2005试题资料下载37.北京航空航天大学信号与系统2003试题资料下载38.北京航空航天大学企业管理基础2004(7.22邓力文补充整理)(许明波绿色部分7。
北航2001-2010控制工程真题合集

试画出参数 T 由零变化到正无穷时的闭环系统根轨迹。
三、(本题 15 分,第一小题 10 分,第二小题 5 分)某系统结构图如 题三图所示:
其中, G(s)
=
10 s(s +1) ,Gc (s)
=
τs +1 ,τ 0.08s +1
>
0
(1)确定参数τ,使开环渐进扶贫特性曲线的截止频率为 5 rad/s;
* ⎡0 x = ⎢⎣1
1⎤ 2⎥⎦
x
+
⎢⎣⎡10⎥⎦⎤u,
y
=
[0
1]x
(1)设计状态反馈向量 k,使得经状态反馈 u=kx+r 后,闭环系统极
点在-1±j 处,这里 r 为参考输入;
(2)队该被控对象构造一极点-5,-5 的状态观测器;
*
*
(3)若采用控制u = k x+ r ,其中 k 为本题(1)求出的反馈向量, x 为
39 / 50
40 / 50
41 / 50
42 / 50
43 / 50
44 / 50
45 / 50
46 / 50
47 / 50
48 / 50
49 / 50
50 / 50
北京航空航天大学 2008 年 硕士研究生入学考试试题 科目代码:933
控制工程综合 (共 6 页)
考生注意:所有答题务必书写在考场提供的答题纸上,书写 在本试题单上的答案一律无效(本题单不参与阅卷)
九、(本题共 16 分,每小题 8 分) (1)对于题九图(a)所示的电路,按动开关 S,使 D1 端的波形如 图 D 所示,画出Q1,Q2, Z 的波形,并求出按动开关 S 在 Z 端形成的脉 冲极性及宽度,Q1,Q2 的厨师状态均为“1”。
北航自动控制原理931题解2013

ess = lim s ⋅
s →0
s ( s + 1)( s + 2) − 0.3849Gc ( s ) 1 ⋅ 2 =0 s ( s + 1)( s + 2) + 0.3849 s
则 Gc ( s ) 具有如下形式 Gc ( s ) = sG0 ( s ) ,代入上式得
lim [( s + 1)( s + 2) - 0.3849G0 ( s )] = 0
Gc ( s )
R( s )
K∗ s +1
1 s ( s + 2)
C (s)
题一图 解 开环传递函数 G (s )=
K* , s ( s + 1)( s +2)
三条根轨迹,起始于开环极点 0, −1, −2 ,趋于无穷远处 实轴上根轨迹 (-1,0), (-∞,-2)
渐近线与实轴夹角 ϕ a = 交点 σ a =-1 分离点坐标: 此时 K * 满足
运动,试计算相应的周期。
(4). 用描述函数法分析该系统是否存在周期运动。若存在周期运动,说明周期运动
的稳定性,并计算运动周期。
r =0
3
-3
0
1 ( s + 1)
2
c
题四图
解
(1)
⎧ 3 c<0 && + c = ⎨ c ⎩−3 c > 0
&(0) = 0, c (0) = −3 解方程得 由c
& 2 + (c − 3) 2 = 36 c
-180 10
-1
10
0
10
1
10
2
10
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2014年北京航空航天大学931自动控制原理 综合考研真题
2013年北京航空航天大学931自动控制原理 综合考研真题
2012年北京航空航天大学931自动控制原理 综合考研真题
2011年北京航空航天大学931自动控制原理 综合考研真题
2010年北京航空航天大学931自动控制原理 综合考研真题
目 录
2014年北京航空航天大学931自动控制原理综合考研真题 2013年北京航空航天大学931自动控制原理综合考研真题 2012年北京航空航天大学931自动控制原理综合考研真题 2011年北京航空航天大学931自动控制原理综合考研真题 2010年北京航空航天大学931自动控制原理综合考研真题 2009年北京航空航天大学931自动控制原理综合考研真题 2008年北京航空航天大学931自动控制原理综合考研真题 2007年北京航空航天大学431自动控制原理考研真题及详解 2006年北京航空航天大学431自动控制原理考研真题及部分详解 2005年北京航空航天大学431自动控制原理考研真题及详解 2004年北京航空航天大学431自动控制原理考研真题及详解 2003年北京航空航天大学431自动控制原理考研真题及详解 2002年北京航空航天大学431自动控制原理考研真题 2001年北京航空航天大学453自动控制原理考研真题及详解 2000年北京航空航天大学453自动控制原理考研真题
2001年北京航空航天大学453自动控制原理 考研真题及详解
2000年北京航空航天大学453自动控制原理 考研真题
2005年北京航空航天大学431自动控制原理 考研真题及详解
2004年北京航空航天大学431自动控制原理 考研真题及详解
2003年北京航空航天大学431自动控制原理 考研真题及详解
2002年北京航空航天大学431自动控制原理 考研真题
2009年北京航空航天大学931自动控制原理 综合考研真题
2008年北京航空航天大学931自动控制原理 综合考研真题
பைடு நூலகம்
2007年北京航空航天大学431自动控制原理 考研真题及详解
2006年北京航空航天大学431自动控制原理 考研真题及部分详解