三轴磁场加速度传感器
三轴数字加速度传感器ADXL345技术资料
概述:ADXL345 是一款小而薄的超低功耗3 轴加速度计,分辨率高(13 位),测量范围达± 16g。
数字输出数据为16 位二进制补码格式,可通过SPI(3 线或4 线)或I2C 数字接口访问。
ADXL345 非常适合移动设备应用。
它可以在倾斜检测应用中测量静态重力加速度,还可以测量运动或冲击导致的动态加速度。
其高分辨率(3.9mg/LSB),能够测量不到1.0°的倾斜角度变化。
该器件提供多种特殊检测功能。
活动和非活动检测功能通过比较任意轴上的加速度与用户设置的阈值来检测有无运动发生。
敲击检测功能可以检测任意方向的单振和双振动作。
自由落体检测功能可以检测器件是否正在掉落。
这些功能可以独立映射到两个中断输出引脚中的一个。
正在申请专利的集成式存储器管理系统采用一个32 级先进先出(FIFO)缓冲器,可用于存储数据,从而将主机处理器负荷降至最低,并降低整体系统功耗。
低功耗模式支持基于运动的智能电源管理,从而以极低的功耗进行阈值感测和运动加速度测量。
ADXL345 采用3 mm × 5 mm × 1 mm,14 引脚小型超薄塑料封装。
对比常用的飞思卡尔的MMZ7260三轴加速度传感器,ADXL345,具有测量精度高、可以通过SPI或I2C直接和单片机通讯等优点。
特性:超低功耗:VS= 2.5 V 时(典型值),测量模式下低至23uA,待机模式下为0.1μA 功耗随带宽自动按比例变化用户可选的分辨率10 位固定分辨率全分辨率,分辨率随g 范围提高而提高,±16g 时高达13 位(在所有g 范围内保持4 mg/LSB 的比例系数)正在申请专利的嵌入式存储器管理系统采用FIFO 技术,可将主机处理器负荷降至最低。
单振/双振检测,活动/非活动监控,自由落体检测电源电压范围:2.0 V 至3.6 VI / O 电压范围:1.7 V 至VSSPI(3 线和4 线)和I2C 数字接口灵活的中断模式,可映射到任一中断引脚通过串行命令可选测量范围通过串行命令可选带宽宽温度范围(-40°C 至+85℃)抗冲击能力:10,000 g无铅/符合RoHS 标准小而薄:3 mm× 5 mm× 1 mm,LGA 封装模组尺寸:23*18*11mm(高度含插针高度应用:机器人控制、运动检测过程控制,电池供电系统硬盘驱动器(HDD)保护,单电源数据采集系统手机,医疗仪器,游戏和定点设备,工业仪器仪表,个人导航设备电路功能与优势ADXL345是一款小巧纤薄的低功耗三轴加速度计,可以对高达±16 g的加速度进行高分辨率(13位)测量。
杭州士兰微电子股份有限公司 SC7A20 三轴微机械数字加速度传感器说明书

±2G/±4G/±8G/±16G三轴微机械数字加速度计描述SC7A20是一款高精度12bit数字三轴加速度传感器芯片,内置功能更丰富,功耗更低,体积更小,测量更精确。
芯片通过I²C/SPI接口与MCU通信,加速度测量数据以中断方式或查询方式获取。
INT1和INT2中断管脚提供多种内部自动检测的中断信号,适应多种运动检测场合,中断源包括6D/4D方向检测中断信号、自由落体检测中断信号、睡眠和唤醒检测中断信号、单击和双击检测中断信号。
芯片内置高精度校准模块,对传感器的失调误差和增益误差进行精确补偿。
±2G、±4G、±8G和±16G四种可调整的全量程测量范围,灵活测量外部加速度,输出数据率1HZ和400HZ间可选。
芯片内置自测试功能允许客户系统测试时检测系统功能,省去复杂的转台测试。
芯片内置产品倾斜校准功能,对贴片和板卡安装导致的倾斜进行补偿,不占系统资源,系统文件升级不影响传感器参数。
主要特点宽电压范围1.71V-3.6V1.8V兼容数字IO口低功耗模式下电源电流低至2µA±2G/±4G/±8G/±16G动态全量程范围 12bit有效数据(HR)I²C/SPI数字输出接口6D/4D方向检测自由落体检测单击双击检测及运动检测可编程中断生成电路内嵌自测试功能内嵌FIFO10000g高G抗击能力应用手机平板室内导航图像旋转运动激活用户接口游戏产品规格分类产品名称 封装形式 打印名称 材料 包装形式 SC7A20TR LGA-12-2x2x1.0 SC7A20 无铅编带内部框图XY ZC-to-V Converter Gain数符号测试条件最小值V CC电路不损坏-0.3 3.6V P电路不损坏V in电路不损坏T OPR电路不损坏T STG电路不损坏(VDD=2.5V, T测试条件123FS=0 (HR mode)FS=1 (HR mode)FS=2 (HR mode)FS=3 (HR mode)参 数符 号测试条件最小值 典型值 最大值 单位 零漂 Ty Off0 FS =0 --±40--mg温漂TC Off 与25°C 的最大偏差 -- ±0.5 -- mg/°C 自测输出V st1FS=0, X 轴 -- 276 -- LSb V st2 FS=0, Y 轴 -- 276 -- LSb V st3FS=0, Z 轴-- 984 -- LSb 系统带宽 BW -- ODR/2 -- HZ 工作温度T OPR-40--+85°C注意:电路2.5V 出厂校准。
三轴加速度传感器原理及应用

三轴加速度传感器原理及应用三轴加速度传感器原理MEMS换能器(Transducer)可分为传感器(Sensor)和致动器(Actuator)两类。
其中传感器会接受外界的传递的物理性输入,通过感测器转换为电子信号,再最终转换为可用的信息,如加速度传感器、陀螺仪、压力传感器等。
其主要感应方式是对一些微小的物理量的变化进行测量,如电阻值、电容值、应力、形变、位移等,再通过电压信号来表示这些变化量。
致动器则接受来自控制器的电子信号指令,做出其要求的反应动作,如光敏开关、MEMS显示器等。
目前的加速度传感器有多种实现方式,主要可分为压电式、电容式及热感应式三种,这三种技术各有其优缺点。
以电容式3轴加速度计的技术原理为例。
电容式加速度计能够感测不同方向的加速度或振动等运动状况。
其主要为利用硅的机械性质设计出的可移动机构,机构中主要包括两组硅梳齿(Silicon Fingers),一组固定,另一组随即运动物体移动;前者相当于固定的电极,后者的功能则是可移动电极。
当可移动的梳齿产生了位移,就会随之产生与位移成比例电容值的改变。
当运动物体出现变速运动而产生加速度时,其内部的电极位置发生变化,就会反映到电容值的变化(ΔC),该电容差值会传送给一颗接口芯片(InteRFace Chip)并由其输出电压值。
因此3轴加速度传感器必然包含一个单纯的机械性MEMS传感器和一枚ASIC接口芯片两部分,前者内部有成群移动的电子,主要测量XY及Z轴的区域,后者则将电容值的变化转换为电压输出。
文中所述的传感器和ASIC接口芯片两部分都可以采用CMOS制程来生产,而在目前的实际生产制造中,由于二者实现技术上的差异,这两部分大都会通过不同的加工流程来生产,再最终封装整合到一起成为系统单封装芯片(SiP)。
封装形式可采用堆叠(Stacked)或并排(Side-by-Side)。
手持设备设计的关键之一是尺寸的小巧。
目前ST采用先进LGA封装的加速度传感器的尺寸仅有3 X 5 X 1mm,十分适合便携式移动设备的应用。
三轴加速度传感器的z敏感轴的校准算法

三轴加速度传感器的z敏感轴的校准算法一、引言三轴加速度传感器是一种常用的传感器,广泛应用于物联网、智能家居、自动驾驶等领域。
在使用三轴加速度传感器时,需要对其进行校准,以保证其测量结果的准确性。
本文将介绍三轴加速度传感器z敏感轴的校准算法。
二、三轴加速度传感器的工作原理三轴加速度传感器是一种基于微机电系统(MEMS)技术的传感器。
它通过测量物体在三个方向上的加速度来确定物体的运动状态。
具体来说,当物体发生运动时,会产生惯性力,这个惯性力可以被转化为电信号输出。
因此,通过测量这些电信号,就可以确定物体在各个方向上的加速度。
三、z敏感轴的校准算法1. 原理由于三轴加速度传感器是一种基于微机电系统(MEMS)技术的传感器,因此其精度受到许多因素的影响。
其中一个主要因素是温度变化。
由于温度变化会导致材料膨胀或收缩,从而影响到MEMS芯片中的加速度传感器,因此需要进行校准。
在进行z敏感轴的校准时,需要将传感器放置在水平面上,并保持不动。
此时,z敏感轴应该与重力方向垂直。
因此,通过测量z敏感轴上的加速度值来确定传感器是否处于垂直状态。
如果传感器没有处于垂直状态,则需要进行校准。
2. 步骤(1)将传感器放置在水平面上,并保持不动。
(2)读取z敏感轴上的加速度值。
(3)如果加速度值不为0,则需要进行校准。
(4)将传感器旋转一定角度,并记录旋转角度和对应的加速度值。
(5)重复步骤4,直到旋转360度。
(6)计算出每个角度对应的期望加速度值。
(7)使用拟合算法计算出校准系数。
(8)使用校准系数对原始数据进行修正。
3. 拟合算法在步骤7中,需要使用拟合算法计算出校准系数。
常用的拟合算法有线性回归、多项式回归、指数回归等。
这里介绍一种基于最小二乘法的拟合算法。
最小二乘法是一种常用的拟合算法,它通过最小化残差平方和来确定拟合函数的系数。
在z敏感轴的校准中,可以使用最小二乘法来确定校准系数。
假设有n个数据点,每个数据点的坐标为(xi,yi),其中xi表示旋转角度,yi表示对应的加速度值。
三轴加速度传感器工作原理

三轴加速度传感器工作原理
1.介绍三轴加速度传感器
三轴加速度传感器是一种测量物体三个方向上加速度的传感器。
其工作原理基于牛顿第二定律,即物体的加速度与物体所受合力成正比,与物体质量成反比。
三轴加速度传感器可用于许多应用中,如智能手机、嵌入式系统和运动跟踪器。
2.传感器的构成
三轴加速度传感器通常由微电机系统(MEMS)制造。
传感器由一个质量极小的振动器和一对电容器组成,一般安装于一个小型IC芯片上。
当传感器受到加速度时,悬挂在振动器上的质点会偏离平衡位置。
偏离的质量会导致电容器之间的电容值发生变化,因此通过测量电容值的变化,就可以计算出物体受到的加速度。
3.工作原理
三轴加速度传感器具有三个方向的感应器,即X、Y、Z轴。
当物体受到加速度时,每个感应器所测量的电容变化量与物体的加速度成正比。
例如,当一个运动员跑步时,他会向前加速,导致X轴感应器的电容值增加。
同样,当一个物体在平面上偏离位置,Y和Z轴感应器的电容值将发生变化。
4.应用场景
三轴加速度传感器广泛应用于各种应用场景中。
在智能手机中,它们可用于自动旋转屏幕和检测手机的手持位置。
此外,在运动跟踪器中,这些传感器可以检测人们在运动时的活动量和步数。
在车辆上,它们可以用于检测车辆受到的横向和纵向加速度,以及车辆的倾斜角度。
5.结论
三轴加速度传感器是一种测量加速度的重要工具,它们可广泛应用于各种领域。
通过更好地理解其工作原理和应用,我们可以更好地利用这些传感器的优势,使人们的日常生活和工作更加舒适和高效。
三轴加速度传感器工作原理

三轴加速度传感器工作原理三轴加速度传感器是测量物体在三个空间轴上的加速度的装置。
它们通常由微机电系统(Microelectromechanical Systems, MEMS)技术制造,具有小体积、低功耗和高精度的特点。
三轴加速度传感器能够广泛应用于物体定位、动作检测和姿态测量等领域。
一个典型的三轴加速度传感器通常由三个独立的加速度传感器构成,分别对应于物体的X、Y和Z轴。
这些传感器通常是微机电系统中的压电式传感器或微机械式传感器。
压电式传感器通过压电效应来测量加速度。
当物体在一些方向上受到外力作用时,会导致传感器内的压电材料产生压电效应,从而在传感器的表面产生电荷。
这个电荷的大小与物体受到的外力的大小成正比,从而可以得到物体在该方向上的加速度。
微机械式传感器则通过物体的惯性来测量加速度。
这些传感器通常由质量块和支撑结构组成。
当物体在一些方向上受到外力作用时,质量块惯性地保持其原来的运动状态,而支撑结构则产生变形。
通过测量这种变形,可以计算出物体在该方向上的加速度。
为了得到物体在三个空间轴上的加速度,三个传感器通常被组合在一起,形成一个三轴加速度传感器。
为了减少误差和干扰,传感器通常还配备了陀螺仪和磁力计等其他传感器。
陀螺仪可以测量物体的角速度,从而提供更准确的姿态测量。
磁力计可以测量磁场的方向,从而提供具备方向信息的定位。
三轴加速度传感器在实际应用中非常广泛。
例如,它们被广泛应用于智能手机和游戏手柄中,用于检测用户的手势和动作。
它们也被用于车辆的动态稳定控制和无人机的姿态控制等领域。
此外,三轴加速度传感器还可以与其他传感器结合使用,实现更多功能,如距离测量和姿态捕捉等。
三轴加速度传感器

三轴加速度传感器1. 引言三轴加速度传感器是一种常见的传感器技术,用于测量物体的加速度和倾斜度。
它在许多领域中得到广泛应用,包括运动检测、姿态测量、智能手机和游戏控制器等设备。
本文将介绍三轴加速度传感器的工作原理、应用领域和未来发展趋势。
2. 工作原理三轴加速度传感器基于微机电系统(MEMS)技术。
它通常由微机械结构、压电材料和电路组成。
当物体受到加速度时,微机械结构会产生微小的位移,并将其转化为电压信号。
这个信号经过放大和滤波后被传感器读取和解析。
三轴加速度传感器通常包含X、Y、Z三个轴向,分别对应物体运动的水平、垂直和纵深方向。
通过测量三轴的加速度值,传感器可以确定物体的运动状态。
3. 应用领域3.1 运动检测三轴加速度传感器广泛应用于运动检测领域。
它可以测量用户的步数、距离、速度和活动强度,用于运动追踪和健身监测。
许多智能手环、智能手表和健身器材上都配备了三轴加速度传感器。
3.2 姿态测量三轴加速度传感器可以测量物体的倾斜度和方向,用于姿态测量和姿势跟踪。
它在虚拟现实、增强现实和航空航天等领域中得到广泛应用。
例如,游戏控制器可以通过传感器测量玩家的倾斜动作,并将其映射到游戏中的角色操作。
3.3 智能手机和平板电脑三轴加速度传感器是智能手机和平板电脑中的重要组成部分。
它可以实现自动屏幕旋转、姿势识别和步态分析等功能。
此外,多个传感器的组合使用,如加速度传感器和陀螺仪的联合使用,可以提供更精确的运动感知和定位能力。
4. 未来发展随着人工智能、物联网和移动技术的快速发展,三轴加速度传感器将在未来得到更广泛的应用。
以下是一些未来发展趋势:4.1 小尺寸化和低功耗随着智能设备更加轻薄和便携,对三轴加速度传感器的尺寸和功耗要求也越来越高。
未来的传感器将更加小巧,能够集成到更多类型的设备中,并且能够在较长时间内维持稳定的工作。
4.2 高精度和多参数测量未来的三轴加速度传感器将具备更高的精度和多参数测量能力。
三轴加速度计的参数对比
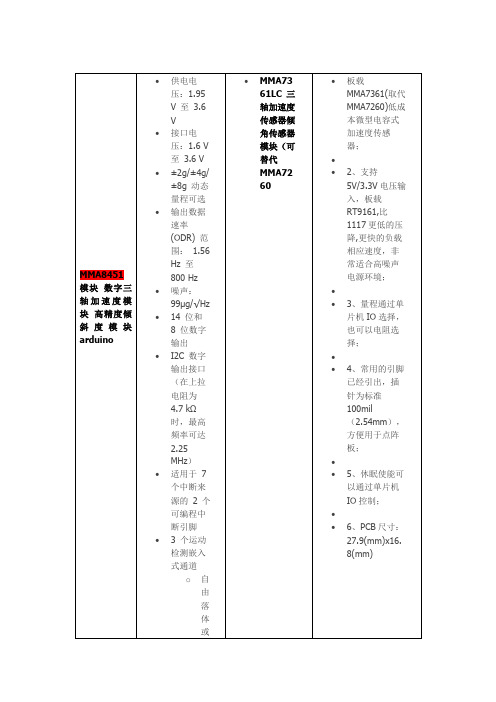
MMA8451模块数字三轴加速度模块高精度倾斜度模块arduino •供电电压:1.95V 至3.6V•接口电压:1.6 V至 3.6 V•±2g/±4g/±8g 动态量程可选•输出数据速率(ODR) 范围: 1.56Hz 至800 Hz•噪声:99μg/√Hz•14 位和8 位数字输出•I2C 数字输出接口(在上拉电阻为4.7 kΩ时,最高频率可达2.25MHz)•适用于7个中断来源的 2 个可编程中断引脚• 3 个运动检测嵌入式通道o自由落体或•MMA7361LC 三轴加速度传感器倾角传感器模块(可替代MMA7260•板载MMA7361(取代MMA7260)低成本微型电容式加速度传感器;••2、支持5V/3.3V电压输入,板载RT9161,比1117更低的压降,更快的负载相应速度,非常适合高噪声电源环境;••3、量程通过单片机IO选择,也可以电阻选择;••4、常用的引脚已经引出,插针为标准100mil(2.54mm),方便用于点阵板;••5、休眠使能可以通过单片机IO控制;••6、PCB尺寸:27.9(mm)x16.8(mm)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
i2c_Initialize(I2CIRQ_DISABLE); // 初始化 RB-110 的 I2C 裝置 i2c0_SetSpeed(I2CMODE_FAST, 400000L); // 設定 I2C 的傳輸速度為 400k
printf("Z axis :%5d\n", ((d5 & 0x80) != 0) ? (((~0)>>16)<<16) | ((d5<<8)+d6): (d5<<8)+d6);
wait_ms (100);
i2c0master_StartN(i2c_gsensor_addr, I2C_WRITE, 1); // 對 ADXL345 取 值
Page: 6/12
圖五 地球磁極與磁力線分佈
計算 Compass 水平時的方位角
接著,我們開始介紹方位角的計算。當 RM-G144 在保持水平的情形下,圖六 的 Yh 軸與 Compass 的 Y 軸是疊合的,因此我們可以從 HMC5843 上讀取 X 軸與 Y 軸磁力,再直接利用 C 語言函式庫裡的 atan2 函數(arctan)做計算,便可以得 到方位角的角度。如下列程式碼所示(注意:本文的方位角是以順時針方向表示, 所以 HMC5843 的 X 軸磁力分量需取負號,才可計算出正確的角度):
Page: 3/12
printf("X axis :%5d\n", ((d1 & 0x80) != 0) ? (((~0)>>16)<<16) | ((d1<<8)+d2): (d1<<8)+d2);
printf("Y axis :%5d\n", ((d3 & 0x80) != 0) ? (((~0)>>16)<<16) | ((d3<<8)+d4): (d3<<8)+d4);
#include <stdio.h> #include <conio.h> #include <roboard.h> #include <windows.h>
void wait_ms(unsigned long ms) { // 針對Windows環境所使用的計時函數(單位 ms)
unsigned long nowtime = GetTickCount(); while ((GetTickCount() - nowtime) <= ms); }
程式執行結果如下圖三所示,電子羅盤所量測到的是在 xyz 軸上的磁力大小
Page: 4/12
(單位:0.5 milli-gauss),加速度計所量測到的是在 xyz 軸上的加速度大小(單 位:4 mg)。
圖三 旋轉 RM-G144 所得到的測量值 利用 RM-G144 計算方位角
在我們可以用 RM-G144 量測到三軸磁力的強度與三軸重力的大小之後,便能 進一歩利用這些數值得到羅盤的方位角。本文中,方位角定義為 Compass 座標系 的 Yh 軸(見圖六,Yh 可視為指南針的指針)與北極所夾的角度,若方位角 0 度 即是正北方,90 度即是正東方,180 度即南方,270 度即是正西方。需要注意的 是,Compass 的座標系與 G-sensor 的座標系是相反的,如圖四所示。
i2c0master_SetRestartN(I2C_READ, 6); // Restart 後, 讀取6筆 data i2c0master_WriteN(0x32); // 從暫存器 0x32 開始往下讀值 d1 = i2c0master_ReadN(); // 讀取X軸的 LSB d2 = i2c0master_ReadN(); // 讀取X軸的 MSB d3 = i2c0master_ReadN(); // 讀取Y軸的 LSB d4 = i2c0master_ReadN(); // 讀取Y軸的 MSB d5 = i2c0master_ReadN(); // 讀取Z軸的 LSB d6 = i2c0master_ReadN(); // 讀取Z軸的 MSB // ADXL345回傳值是以 2 的補數法表示,所以負號部分須做符號延伸 // 回傳值範圍 : -512 ~ 511(± 2 g),若加速度超過表示範圍,將會回傳其 最大值
如圖五所示,地球磁場的南北極與地理的南北極是有些偏離的,在這裡我們 所講的南北極是指地磁的南北極,不要跟地理的南北極搞混了。而地磁的南北極 是會随時間而改變的。在 2001 年時,地磁的北極在北緯 81.3 度、西經 110.8 度 的位置。而 2005 年時,地磁的北極轉移到北緯 82.7 度、西經 114.4 度。所以我 們利用 RM-G144 所得到的方位角是指向地磁北極的角度,如果要得到指向地理 北極的角度,需要再進一步的作換算,在此我們不討論這個部份。
int main(void){ unsigned int d1,d2,d3,d4,d5,d6; unsigned char i2c_compass_addr = 0x1E; // HMC5843 的位址(7 bits address) unsigned char i2c_gsensor_addr = 0x53; // ADXL345 的位址(7 bits address)
printf("Acc of X-axis :%5d\n", ((d2 & 0x80) != 0) ? (((~0)>>16)<<16) | ((d2<<8)
+d1): (d2<<8)+d1); printf("Acc of Y-axis :%5d\n", ((d4 & 0x80) != 0) ? (((~0)>>16)<<16) | ((d4<<8)
RM-G144 簡介
RM-G144 為六軸電子羅盤與加速度計模組,使用一顆量測 3 軸加速度的 ADXL345,以及一顆量測 3 軸磁力場的電子羅盤 HMC5843,模組上除了感測晶片 外,周圍還多加了保護電路,可避免電壓接錯而誤將感測晶片燒毀的情況發生(將 內部電路短路則不在此範圍)。
整個 RM-G144 大小為 2 cm x 2 cm,以 I2C 介面通訊,最高傳輸速度可達 400 kbps,具雙向對接插座,可串聯相同介面的 sensor,並具有 2 個固定孔。電壓 輸入為 DC 5V,下圖一為 RM-G144 外觀,對外連接腳位 1~6 分別是 5V、GND、SCL、 SDA、RESEVERED、RESERVERED。圖二為 RB-110 連接 RM-G144 的方式(紅圈處為 RB-110 的 I2C 輸出埠)。
// ----------------開始讀取測量值----------------// do {
i2c0master_StartN(i2c_compass_addr, I2C_WRITE, 1); // 對 HMC5843 取 值
i2c0master_SetRestartN(I2C_READ, 6); // 讀取6筆 i2c0master_WriteN(0x03); // 從暫存器0x03開始往下讀值 d1 = i2c0master_ReadN(); // 讀取X軸的 MSB d2 = i2c0master_ReadN(); // 讀取X軸的 LSB d3 = i2c0master_ReadN(); // 讀取Y軸的 MSB d4 = i2c0master_ReadN(); // 讀取Y軸的 LSB d5 = i2c0master_ReadN(); // 讀取Z軸的 MSB d6 = i2c0master_ReadN(); // 讀取Z軸的 LSB // HMC5843回傳值是以2的補數法表示,所以負號部分須做符號延伸 // 回傳值範圍:-2048~2047,若外在磁力超過表示範圍,將會回傳-4096
Page: 2/12
i2c0master_StartN(i2c_compass_addr, I2C_WRITE, 2);// 對 HMC5843 寫入 2 bytes (初始化)
i2c0master_WriteN(0x02); // 設定模式(暫存器位置為 0x02) i2c0master_WriteN(0x00); // 設定為 continue-measureture 模式 i2c0master_StartN(i2c_gsensor_addr, I2C_WRITE, 2); // 對ADXL345寫入2 bytes(初始化) i2c0master_WriteN(0x2d); // 設定 Pwoer_Control (暫存器位置為0x2d) i2c0master_WriteN(0x28); // 設定為 link and measure 模式 i2c0master_StartN(i2c_gsensor_addr, I2C_WRITE, 2); // 對 ADXL345 寫入 2 bytes (初始化) i2c0master_WriteN(0x31); // 設定 Data_Format (暫存器位置為0x31) i2c0master_WriteN(0x08); // 設定為 Full_Resolution 模式, 量測範圍為± 2 g, Resolution = 10 bits
+d3): (d4<<8)+d3); printf("Acc of Z-axis :%5d\n", ((d6 & 0x80) != 0) ? (((~0)>>16)<<16) | ((d6<<8)
+d5): (d6<<8)+d5); }while(_getch() != 27);