三轴加速度传感器
三轴加速度原理

三轴加速度原理三轴加速度原理是指在三维空间中测量和计算物体的加速度。
三轴加速度原理是基于牛顿第二定律和三轴加速度传感器的工作原理。
三轴加速度传感器能够同时测量物体在x、y和z轴上的加速度,并将这些加速度信息转换成电信号输出。
三轴加速度原理的基本思想是利用三轴加速度传感器测量物体在三个不同方向上的加速度,从而得到物体的加速度矢量。
根据牛顿第二定律,物体的加速度等于物体所受的合外力除以物体的质量。
因此,通过测量物体的加速度,可以得到物体所受的合外力的大小和方向。
三轴加速度传感器通常采用微机电系统(MEMS)技术制造,其基本原理是利用微小的质量块和弹簧系统来测量加速度。
当物体受到加速度时,质量块会受到惯性力的作用而发生位移,这个位移可以通过压电效应或电容效应转换成电信号输出。
三轴加速度传感器通常由三个独立的单轴加速度传感器组成,每个单轴传感器可以测量物体在相应轴上的加速度。
通过三轴加速度传感器的组合使用,可以同时测量物体在x、y和z轴上的加速度,从而得到物体的三维加速度。
三轴加速度传感器的典型应用包括医疗设备、车辆导航、智能手机和游戏控制器等。
在医疗设备中,三轴加速度传感器可以用于监测患者的运动和姿势,从而提供给医生有关患者健康状况的信息。
在车辆导航中,三轴加速度传感器可以用于测量车辆的加速度和转弯角度,从而提供给导航系统有关车辆行驶状态的信息。
在智能手机和游戏控制器中,三轴加速度传感器可以用于检测用户的手势和动作,从而实现触摸屏幕、倾斜控制和动作感知等功能。
三轴加速度原理的研究和应用对于物体运动的测量和分析具有重要的意义。
通过利用三轴加速度传感器可以实现对物体加速度的准确测量和分析,从而可以研究物体的运动规律、判断物体的姿势和动作,并应用于各种领域的工程和科学研究中。
此外,三轴加速度传感器还可以与其他传感器(如陀螺仪和磁力计)结合使用,以实现对物体在三维空间中的运动状态的全面测量和分析。
总之,三轴加速度原理是利用三轴加速度传感器测量和计算物体的加速度的基本原理。
Analog Devices ADXL335 三轴加速度传感器说明书
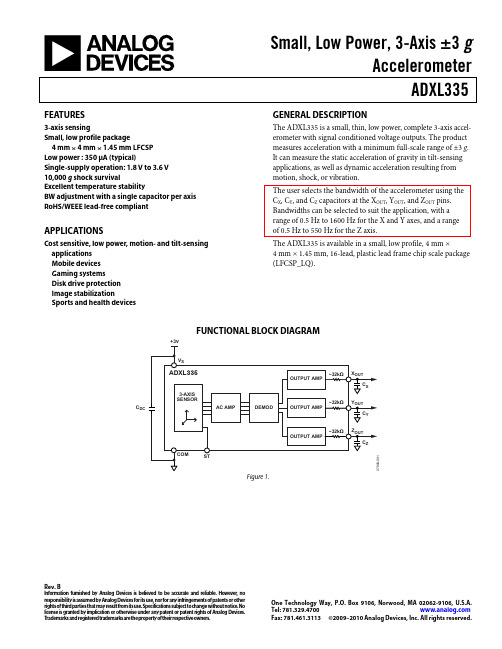
Small, Low Power, 3-Axis ±3 gAccelerometerADXL335Rev. BInformation furnished by Analog Devices is believed to be accurate and reliable. However , no responsibility is assumed by Analog Devices for its use, nor for any infringements of patents or other rights of third parties that may result from its use. Specifications subject to change without notice. No license is granted by implication or otherwise under any patent or patent rights of Analog Devices. T rademarks and registered trademarks are the property of their respective owners.One Technology Way, P.O. Box 9106, Norwood, M A 02062-9106, U.S.A.Tel: 781.329.4700 Fax: 781.461.3113 ©2009–2010 Analog Devices, Inc. All rights reserved.FEATURES3-axis sensingSmall, low profile package4 mm × 4 mm × 1.45 mm LFCSP Low power : 350 μA (typical)Single-supply operation: 1.8 V to 3.6 V 10,000 g shock survivalExcellent temperature stabilityBW adjustment with a single capacitor per axis RoHS/WEEE lead-free compliantAPPLICATIONSCost sensitive, low power, motion- and tilt-sensing applications Mobile devices Gaming systemsDisk drive protection Image stabilizationSports and health devicesGENERAL DESCRIPTIONThe ADXL335 is a small, thin, low power, complete 3-axis accel-erometer with signal conditioned voltage outputs. The product measures acceleration with a minimum full-scale range of ±3 g . It can measure the static acceleration of gravity in tilt-sensing applications, as well as dynamic acceleration resulting from motion, shock, or vibration.The user selects the bandwidth of the accelerometer using the C X , C Y , and C Z capacitors at the X OUT , Y OUT , and Z OUT pins. Bandwidths can be selected to suit the application, with a range of 0.5 Hz to 1600 Hz for the X and Y axes, and a range of 0.5 Hz to 550 Hz for the Z axis.The ADXL335 is available in a small, low profile, 4 mm ×4 mm × 1.45 mm, 16-lead, plastic lead frame chip scale package (LFCSP_LQ).FUNCTIONAL BLOCK DIAGRAMC DCFigure 1.ADXL335Rev. B | Page 2 of 16TABLE OF CONTENTSFeatures .............................................................................................. 1 Applications ....................................................................................... 1 General Description ......................................................................... 1 Functional Block Diagram .............................................................. 1 Revision History ............................................................................... 2 Specifications ..................................................................................... 3 Absolute Maximum Ratings ............................................................ 4 ESD Caution .................................................................................. 4 Pin Configuration and Function Descriptions ............................. 5 Typical Performance Characteristics ............................................. 6 Theory of Operation ...................................................................... 10 Mechanical Sensor ...................................................................... 10 Performance ................................................................................ 10 Applications Information .............................................................. 11 Power Supply Decoupling ......................................................... 11 Setting the Bandwidth Using C X , C Y , and C Z .......................... 11 Self-Test ....................................................................................... 11 Design Trade-Offs for Selecting Filter Characteristics: The Noise/BW Trade-Off .................................................................. 11 Use with Operating V oltages Other Than 3 V ........................... 12 Axes of Acceleration Sensitivity ............................................... 12 Layout and Design Recommendations ................................... 13 Outline Dimensions ....................................................................... 14 Ordering Guide .. (14)REVISION HISTORY1/10—Rev. A to Rev. BChanges to Figure 21 (9)7/09—Rev. 0 to Rev. AChanges to Figure 22 ........................................................................ 9 Changes to Outline Dimensions (14)1/09—Revision 0: Initial VersionADXL335Rev. B | Page 3 of 16SPECIFICATIONST A = 25°C, V S = 3 V , C X = C Y = C Z = 0.1 μF, acceleration = 0 g , unless otherwise noted. All minimum and maximum specifications are guaranteed. Typical specifications are not guaranteed. Table 1.Parameter Conditions M in Typ M ax Unit SENSOR INPUT Each axisMeasurement Range ±3 ±3.6g Nonlinearity % of full scale ±0.3 % Package Alignment Error ±1 Degrees Interaxis Alignment Error ±0.1 DegreesCross-Axis Sensitivity 1±1 % SENSITIVITY (RATIOMETRIC)2 Each axis Sensitivity at X OUT , Y OUT , Z OUT V S = 3 V 270 300 330 mV/gSensitivity Change Due to Temperature 3V S = 3 V ±0.01 %/°C ZERO g BIAS LEVEL (RATIOMETRIC) 0 g Voltage at X OUT , Y OUT V S = 3 V 1.35 1.5 1.65 V 0 g Voltage at Z OUT V S = 3 V 1.2 1.5 1.8 V 0 g Offset vs. Temperature ±1 m g /°C NOISE PERFORMANCE Noise Density X OUT , Y OUT 150 μg /√Hz rms Noise Density Z OUT 300 μg /√Hz rms FREQUENCY RESPONSE 4 Bandwidth X OUT , Y OUT 5 No external filter 1600 Hz Bandwidth Z OUT 5 No external filter 550 Hz R FILT Tolerance 32 ± 15% kΩ Sensor Resonant Frequency 5.5 kHz SELF-TEST 6 Logic Input Low +0.6 V Logic Input High +2.4 V ST Actuation Current +60 μA Output Change at X OUT Self-Test 0 to Self-Test 1 −150 −325 −600 mV Output Change at Y OUT Self-Test 0 to Self-Test 1 +150 +325 +600 mV Output Change at Z OUT Self-Test 0 to Self-Test 1 +150 +550 +1000 mV OUTPUT AMPLIFIER Output Swing Low No load 0.1 V Output Swing High No load 2.8 V POWER SUPPLY Operating Voltage Range 1.8 3.6 V Supply Current V S = 3 V 350 μA Turn-On Time 7 No external filter 1 ms TEMPERATURE Operating Temperature Range −40 +85 °C1 Defined as coupling between any two axes. 2Sensitivity is essentially ratiometric to V S . 3Defined as the output change from ambient-to-maximum temperature or ambient-to-minimum temperature. 4Actual frequency response controlled by user-supplied external filter capacitors (C X , C Y , C Z ). 5Bandwidth with external capacitors = 1/(2 × π × 32 kΩ × C). For C X , C Y = 0.003 μF, bandwidth = 1.6 kHz. For C Z = 0.01 μF, bandwidth = 500 Hz. For C X , C Y , C Z = 10 μF, bandwidth = 0.5 Hz. 6Self-test response changes cubically with V S . 7Turn-on time is dependent on C X , C Y , C Z and is approximately 160 × C X or C Y or C Z + 1 ms, where C X , C Y , C Z are in microfarads (μF).ADXL335Rev. B | Page 4 of 16ABSOLUTE MAXIMUM RATINGSTable 2.Parameter Rating Acceleration (Any Axis, Unpowered) 10,000 g Acceleration (Any Axis, Powered) 10,000 g V S −0.3 V to +3.6 V All Other Pins (COM − 0.3 V) to (V S + 0.3 V)Output Short-Circuit Duration(Any Pin to Common)Indefinite Temperature Range (Powered) −55°C to +125°C Temperature Range (Storage) −65°C to +150°CStresses above those listed under Absolute Maximum Ratings may cause permanent damage to the device. This is a stress rating only; functional operation of the device at these or any other conditions above those indicated in the operationalsection of this specification is not implied. Exposure to absolute maximum rating conditions for extended periods may affect device reliability.ESD CAUTIONADXL335Rev. B | Page 5 of 16PIN CONFIGURATION AND FUNCTION DESCRIPTIONS07808-003NOTES1. EXPOSED PAD IS NOT INTERNALLYCONNECTED BUT SHOULD BE SOLDERED FOR MECHANICAL INTEGRITY.NC = NO CONNECTNCST COM NCX OUT NC Y OUT NCC O MC O MC O MZ O U TN CV SV SN CFigure 2. Pin ConfigurationTable 3. Pin Function DescriptionsPin No. MnemonicDescription1 NC No Connect.12 ST Self-Test.3 C O M Common.4 NC No Connect.15 C O M Common.6 C O M Common.7 C O M Common.8 Z OUTZ Channel Output.9 NC No Connect.110 Y OUTY Channel Output.11 NC No Connect. 112 X OUTX Channel Output.13 NC No Connect. 114 V S Supply Voltage (1.8 V to 3.6 V). 15 V SSupply Voltage (1.8 V to 3.6 V).16 NC No Connect. 1EP Exposed PadNot internally connected. Solder for mechanical integrity.1NC pins are not internally connected and can be tied to COM pins, unless otherwise noted.ADXL335Rev. B | Page 6 of 16TYPICAL PERFORMANCE CHARACTERISTICSN > 1000 for all typical performance plots, unless otherwise noted.500102030401.42 1.44 1.46 1.48 1.50 1.52 1.54 1.56 1.58% O F P O P U L A T I O NOUTPUT (V)07808-005Figure 3. X-Axis Zero g Bias at 25°C, V S = 3 V500102030401.42 1.44 1.46 1.48 1.50 1.52 1.54 1.56 1.58% O F P O P U L A T I O NOUTPUT (V)07808-006Figure 4. Y-Axis Zero g Bias at 25°C, V S = 3 V1.42 1.44 1.46 1.48 1.50 1.52 1.54 1.56 1.58% O F P O P U L A T I O NOUTPUT (V)07808-0070510152025Figure 5. Z-Axis Zero g Bias at 25°C, V S = 3 V % O F P O P U L A T I O NVOLTS (V)07808-00810203040–0.40–0.38–0.36–0.34–0.32–0.30–0.28–0.26Figure 6. X-Axis Self-Test Response at 25°C, V S = 3 V% O F P O P U L A T I O NVOLTS (V)07808-00910203050400.260.280.300.320.340.360.380.40Figure 7. Y-Axis Self-Test Response at 25°C, V S = 3 V% O F P O P U L A T I O NVOLTS (V)07808-010102030400.480.500.520.540.560.580.600.62Figure 8. Z-Axis Self-Test Response at 25°C, V S = 3 VADXL335Rev. B | Page 7 of 16% O F P O P U L A T I O NTEMPERATURE COEFFICIENT (m g/°C)51015202530–3.0–2.5–2.0–1.5–1.0–0.500.5 1.0 1.5 2.0 2.5 3.007808-011Figure 9. X-Axis Zero g Bias Temperature Coefficient, V S = 3 V% O F P O P U L A T I O NTEMPERATURE COEFFICIENT (m g /°C)10204030–3.0–2.5–2.0–1.5–1.0–0.500.5 1.0 1.5 2.0 2.53.007808-012Figure 10. Y-Axis Zero g Bias Temperature Coefficient, V S = 3 V% O F P O P U L A T I O NTEMPERATURE COEFFICIENT (m g/°C)510152007808-013Figure 11. Z-Axis Zero g Bias Temperature Coefficient, V S = 3 V1.451.461.471.481.491.501.511.521.531.541.55TEMPERATURE (°C)O U T P U T (V )07808-014Figure 12. X-Axis Zero g Bias vs. Temperature—Eight Parts Soldered to PCB1.451.461.471.481.491.501.511.521.531.541.55–40–30–20–100102030405060708090100TEMPERATURE (°C)O U T P U T (V )07808-015Figure 13. Y-Axis Zero g Bias vs. Temperature—Eight Parts Soldered to PCB1.301.321.341.361.381.401.421.441.461.481.50–40–30–20–100102030405060708090100TEMPERATURE (°C)O U T P U T (V )07808-016Figure 14. Z-Axis Zero g Bias vs. Temperature—Eight Parts Soldered to PCBADXL335Rev. B | Page 8 of 16% O F P O P U L A T I O NSENSITIVITY (V/g )51015200.2850.2880.2910.2940.2970.3000.3030.3060.3090.3120.31507808-017Figure 15. X-Axis Sensitivity at 25°C, V S = 3 V% O F P O P U L A T I O NSENSITIVITY (V/g )051015200.2850.2880.2910.2940.2970.3000.3030.3060.3090.3120.3152507808-018Figure 16. Y-Axis Sensitivity at 25°C, V S = 3 V% O F P O P U L A T I O NSENSITIVITY (V/g )51015202507808-019Figure 17. Z-Axis Sensitivity at 25°C, V S= 3 V0.2800.2850.2900.2950.3000.3050.3100.3150.320TEMPERATURE (°C)S E N S I T I V I T Y (V /g )07808-020Figure 18. X-Axis Sensitivity vs. Temperature—Eight Parts Soldered to PCB, V S= 3 V0.2800.2850.2900.2950.3000.3050.3100.3150.320–40–30–20–100102030405060708090100TEMPERATURE (°C)S E N S I T I V I T Y (V /g )07808-021Figure 19. Y-Axis Sensitivity vs. Temperature—Eight Parts Soldered to PCB, V S= 3 V0.2800.2850.2900.2950.3000.3050.3100.3150.320–40–30–20–100102030405060708090100TEMPERATURE (°C)S E N S I T I V I T Y (V /g )07808-022Figure 20. Z-Axis Sensitivity vs. Temperature—Eight Parts Soldered to PCB, V S = 3 VADXL335Rev. B | Page 9 of 16SUPPLY (V)C U R R E N T (µA )0100501502002503003501.52.0 2.53.0 3.54.007808-023Figure 21. Typical Current Consumption vs. Supply VoltageTIME (1ms/DIV)07808-024Figure 22. Typical Turn-On Time, V S = 3 VADXL335Rev. B | Page 10 of 16THEORY OF OPERATIONThe ADXL335 is a complete 3-axis acceleration measurement system. The ADXL335 has a measurement range of ±3 g mini-mum. It contains a polysilicon surface-micromachined sensor and signal conditioning circuitry to implement an open-loop acceleration measurement architecture. The output signals are analog voltages that are proportional to acceleration. The accelerometer can measure the static acceleration of gravity in tilt-sensing applications as well as dynamic acceleration resulting from motion, shock, or vibration.The sensor is a polysilicon surface-micromachined structure built on top of a silicon wafer. Polysilicon springs suspend the structure over the surface of the wafer and provide a resistance against acceleration forces. Deflection of the structure is meas-ured using a differential capacitor that consists of independent fixed plates and plates attached to the moving mass. The fixed plates are driven by 180° out-of-phase square waves. Acceleration deflects the moving mass and unbalances the differential capacitor resulting in a sensor output whose amplitude is proportional to acceleration. Phase-sensitive demodulation techniques are then used to determine the magnitude and direction of the acceleration. The demodulator output is amplified and brought off-chip through a 32 kΩ resistor. The user then sets the signalbandwidth of the device by adding a capacitor. This filtering improves measurement resolution and helps prevent aliasing.MECHANICAL SENSORThe ADXL335 uses a single structure for sensing the X, Y, and Z axes. As a result, the three axes’ sense directions are highly orthogonal and have little cross-axis sensitivity. Mechanical misalignment of the sensor die to the package is the chief source of cross-axis sensitivity. Mechanical misalignment can, of course, be calibrated out at the system level.PERFORMANCERather than using additional temperature compensation circui-try, innovative design techniques ensure that high performance is built in to the ADXL335. As a result, there is no quantization error or nonmonotonic behavior, and temperature hysteresis is very low (typically less than 3 m g over the −25°C to +70°C temperature range).ADXL335 APPLICATIONS INFORMATIONPOWER SUPPLY DECOUPLINGFor most applications, a single 0.1 μF capacitor, C DC, placedclose to the ADXL335 supply pins adequately decouples the accelerometer from noise on the power supply. However, in applications where noise is present at the 50 kHz internal clock frequency (or any harmonic thereof), additional care in power supply bypassing is required because this noise can cause errorsin acceleration measurement.If additional decoupling is needed, a 100 Ω (or smaller) resistoror ferrite bead can be inserted in the supply line. Additionally, a larger bulk bypass capacitor (1 μF or greater) can be added in parallel to C DC. Ensure that the connection from the ADXL335 ground to the power supply ground is low impedance becausenoise transmitted through ground has a similar effect to noise transmitted through V S.SETTING THE BANDWIDTH USING C X, C Y, AND C ZThe ADXL335 has provisions for band limiting the X OUT, Y OUT,and Z OUT pins. Capacitors must be added at these pins to imple-ment low-pass filtering for antialiasing and noise reduction. The equation for the 3 dB bandwidth isF−3 dB = 1/(2π(32 kΩ) × C(X, Y, Z))or more simplyF–3 dB = 5 μF/C(X, Y, Z)The tolerance of the internal resistor (R FILT) typically varies asmuch as ±15% of its nominal value (32 kΩ), and the bandwidth varies accordingly. A minimum capacitance of 0.0047 μF for C X,C Y, and C Z is recommended in all cases.Table 4. Filter Capacitor Selection, C X, C Y, and C ZBandwidth (Hz) Capacitor (μF)1 4.7 10 0.47 50 0.10 100 0.05 200 0.027 500 0.01SELF-TESTThe ST pin controls the self-test feature. When this pin is set toV S, an electrostatic force is exerted on the accelerometer beam.The resulting movement of the beam allows the user to test ifthe accelerometer is functional. The typical change in outputis −1.08 g (corresponding to −325 mV) in the X-axis, +1.08 g(or +325 mV) on the Y-axis, and +1.83 g (or +550 mV) on theZ-axis. This ST pin can be left open-circuit or connected tocommon (COM) in normal use. Never expose the ST pin to voltages greater than V S + 0.3 V.If this cannot be guaranteed due to the system design (for instance, if there are multiple supply voltages), then a lowV F clamping diode between ST and V S is recommended. DESIGN TRADE-OFFS FOR SELECTING FILTER CHARACTERISTICS: THE NOISE/BW TRADE-OFF The selected accelerometer bandwidth ultimately determines the measurement resolution (smallest detectable acceleration). Filtering can be used to lower the noise floor to improve the resolution of the accelerometer. Resolution is dependent on the analog filter bandwidth at X OUT, Y OUT, and Z OUT.The output of the ADXL335 has a typical bandwidth of greater than 500 Hz. The user must filter the signal at this point to limit aliasing errors. The analog bandwidth must be no more than half the analog-to-digital sampling frequency to minimize aliasing. The analog bandwidth can be further decreased to reduce noise and improve resolution.The ADXL335 noise has the characteristics of white Gaussian noise, which contributes equally at all frequencies and is described in terms of μg/√Hz (the noise is proportional to the square root of the accelerometer bandwidth). The user should limit bandwidth to the lowest frequency needed by the applica-tion to maximize the resolution and dynamic range of the accelerometer.With the single-pole, roll-off characteristic, the typical noise of the ADXL335 is determined by)1.6(××=BWDensityNoiseNoisermsIt is often useful to know the peak value of the noise. Peak-to-peak noise can only be estimated by statistical methods. Table 5 is useful for estimating the probabilities of exceeding various peak values, given the rms value.Table 5. Estimation of Peak-to-Peak NoisePeak-to-Peak Value% of Time That Noise ExceedsNominal Peak-to-Peak Value2 × rms 324 × rms 4.66 × rms 0.278 × rms 0.006ADXL335USE WITH OPERATING VOLTAGES OTHER THAN 3 VThe ADXL335 is tested and specified at V S = 3 V; however, it can be powered with V S as low as 1.8 V or as high as 3.6 V . Note that some performance parameters change as the supply voltage is varied.The ADXL335 output is ratiometric, therefore, the output sensitivity (or scale factor) varies proportionally to the supply voltage. At V S = 3.6 V , the output sensitivity is typi- cally 360 mV/g . At V S = 2 V , the output sensitivity is typically 195 mV/g .The zero g bias output is also ratiometric, thus the zero g output is nominally equal to V S /2 at all supply voltages. The output noise is not ratiometric but is absolute in volts; therefore, the noise density decreases as the supply voltage increases. This is because the scale factor (mV/g ) increases while the noise voltage remains constant. At V S = 3.6 V , the X-axis and Y-axis noise density is typically 120 μg /√Hz, whereas at V S = 2 V , the X-axis and Y-axis noise density is typically 270 μg /√Hz.Self-test response in g is roughly proportional to the square of the supply voltage. However, when ratiometricity of sensitivity is factored in with supply voltage, the self-test response in volts is roughly proportional to the cube of the supply voltage. For example, at V S = 3.6 V , the self-test response for the ADXL335 is approximately −560 mV for the X-axis, +560 mV for the Y-axis, and +950 mV for the Z-axis.At V S = 2 V , the self-test response is approximately −96 mV for the X-axis, +96 mV for the Y-axis, and −163 mV for the Z-axis. The supply current decreases as the supply voltage decreases. Typical current consumption at V S = 3.6 V is 375 μA, and typi-cal current consumption at V S = 2 V is 200 μA.AXES OF ACCELERATION SENSITIVITYA X07808-025Figure 23. Axes of Acceleration Sensitivity; Corresponding Output VoltageIncreases When Accelerated Along the Sensitive Axis.X OUT = –1g Y OUT = 0g Z= 0gGRAVITYX OUT = 0g Y OUT = 1g Z OUT = 0gX OUT = 0g Y OUT = –1g Z OUT = 0gX OUT = 1g YOUT = 0gZ OUT = 0gX OUT = 0g Y OUT = 0g Z OUT = 1g X OUT = 0g Y OUT = 0g Z OUT = –1g07808-026Figure 24. Output Response vs. Orientation to GravityADXL335LAYOUT AND DESIGN RECOMMENDATIONSThe recommended soldering profile is shown in Figure 25 followed by a description of the profile features in Table 6. The recommended PCB layout or solder land drawing is shown in Figure 26.07808-002T E M P E R A T U R ETIMETFigure 25. Recommended Soldering ProfileTable 6. Recommended Soldering ProfileProfile Feature Sn63/Pb37 Pb-Free Average Ramp Rate (T L to T P ) 3°C/sec max 3°C/sec maxPreheat Minimum Temperature (T SMIN ) 100°C 150°C Maximum Temperature (T SMAX ) 150°C 200°C Time (T SMIN to T SMAX )(t S ) 60 sec to 120 sec 60 sec to 180 sec T SMAX to T L Ramp-Up Rate 3°C/sec max 3°C/sec max Time Maintained Above Liquidous (T L ) Liquidous Temperature (T L ) 183°C 217°C Time (t L ) 60 sec to 150 sec 60 sec to 150 sec Peak Temperature (T P ) 240°C + 0°C/−5°C 260°C + 0°C/−5°C Time Within 5°C of Actual Peak Temperature (t P ) 10 sec to 30 sec 20 sec to 40 sec Ramp-Down Rate 6°C/sec max 6°C/sec max Time 25°C to Peak Temperature 6 minutes max 8 minutes max0.35DIMENSIONS SHOWN IN MILLIMETERS07808Figure 26. Recommended PCB LayoutADXL335OUTLINE DIMENSIONS051909-A1.500.08PIN COMPLIANT TO JEDEC STANDARDS MO-220-WGGD.FOR PROPER CONNECTION OF THE EXPOSED PAD,REFER TO THE PIN CONFIGURATION AND FUNCTION DESCRIPTIONSSECTION OF THIS DATA SHEET.Figure 27. 16-Lead Lead Frame Chip Scale Package [LFCSP_LQ]4 mm × 4 mm Body, 1.45 mm Thick Quad(CP-16-14)Dimensions shown in millimetersORDERING GUIDEModel 1 M easurement Range Specified Voltage Temperature Range Package Description Package OptionADXL335BCPZ ±3 g 3 V −40°C to +85°C 16-Lead LFCSP_LQ CP-16-14 ADXL335BCPZ–RL ±3 g 3 V −40°C to +85°C 16-Lead LFCSP_LQ CP-16-14 ADXL335BCPZ–RL7 ±3 g 3 V −40°C to +85°C 16-Lead LFCSP_LQ CP-16-14 EVAL-ADXL335ZEvaluation Board1Z = RoHS Compliant Part.ADXL335 NOTESADXL335NOTESAnalog Devices offers specific products designated for automotive applications; please consult your local Analog Devices sales representative for details. Standard products sold by Analog Devices are not designed, intended, or approved for use in life support, implantable medical devices, transportation, nuclear, safety, or other equipment where malfunction of the product can reasonably be expected to result in personal injury, death, severe property damage, or severe environmental harm. Buyer uses or sells standard products for use in the above critical applications at Buyer's own risk and Buyer agrees to defend, indemnify, and hold harmless Analog Devices from any and all damages, claims, suits, or expenses resulting from such unintended use.©2009–2010 Analog Devices, Inc. All rights reserved. Trademarks andregistered trademarks are the property of their respective owners.D07808-0-1/10(B)。
杭州士兰微电子股份有限公司 SC7A20 三轴微机械数字加速度传感器说明书

±2G/±4G/±8G/±16G三轴微机械数字加速度计描述SC7A20是一款高精度12bit数字三轴加速度传感器芯片,内置功能更丰富,功耗更低,体积更小,测量更精确。
芯片通过I²C/SPI接口与MCU通信,加速度测量数据以中断方式或查询方式获取。
INT1和INT2中断管脚提供多种内部自动检测的中断信号,适应多种运动检测场合,中断源包括6D/4D方向检测中断信号、自由落体检测中断信号、睡眠和唤醒检测中断信号、单击和双击检测中断信号。
芯片内置高精度校准模块,对传感器的失调误差和增益误差进行精确补偿。
±2G、±4G、±8G和±16G四种可调整的全量程测量范围,灵活测量外部加速度,输出数据率1HZ和400HZ间可选。
芯片内置自测试功能允许客户系统测试时检测系统功能,省去复杂的转台测试。
芯片内置产品倾斜校准功能,对贴片和板卡安装导致的倾斜进行补偿,不占系统资源,系统文件升级不影响传感器参数。
主要特点宽电压范围1.71V-3.6V1.8V兼容数字IO口低功耗模式下电源电流低至2µA±2G/±4G/±8G/±16G动态全量程范围 12bit有效数据(HR)I²C/SPI数字输出接口6D/4D方向检测自由落体检测单击双击检测及运动检测可编程中断生成电路内嵌自测试功能内嵌FIFO10000g高G抗击能力应用手机平板室内导航图像旋转运动激活用户接口游戏产品规格分类产品名称 封装形式 打印名称 材料 包装形式 SC7A20TR LGA-12-2x2x1.0 SC7A20 无铅编带内部框图XY ZC-to-V Converter Gain数符号测试条件最小值V CC电路不损坏-0.3 3.6V P电路不损坏V in电路不损坏T OPR电路不损坏T STG电路不损坏(VDD=2.5V, T测试条件123FS=0 (HR mode)FS=1 (HR mode)FS=2 (HR mode)FS=3 (HR mode)参 数符 号测试条件最小值 典型值 最大值 单位 零漂 Ty Off0 FS =0 --±40--mg温漂TC Off 与25°C 的最大偏差 -- ±0.5 -- mg/°C 自测输出V st1FS=0, X 轴 -- 276 -- LSb V st2 FS=0, Y 轴 -- 276 -- LSb V st3FS=0, Z 轴-- 984 -- LSb 系统带宽 BW -- ODR/2 -- HZ 工作温度T OPR-40--+85°C注意:电路2.5V 出厂校准。
三轴加速度传感器使用说明

三轴加速度传感器模块使用说明概述H48C三轴加速度传感器能测量在三个轴(X、Y、Z)方向上的±3g的加速度值,模块板载一个自动负载调节器,为H48C提供3.3V的电源,H48C输出的模拟信号(电压)由模块上的MCP3204(四通道,12-bit)读取并转换为数字信号输出。
特点●测量范围±3g(每个轴)●使用MEMS (微型机电系统) 技术,实现自动补偿●板载自动负载调节器,和高解析度的ADC●体积小巧:0.7" x 0.8" (17.8 mm x 20.3 mm)●工作温度范围广-25° to 75° C基本连线图H48C连接到C51上只需要直接选择任意三个脚连接连接即可,如图1图 1* 与单片机连接的引脚可以任意选择工作原理通过MEMS技术,和内置的补偿H48C加速度传感器通过MCP3204模数转换器实现同步输出,要获取指定轴加速度的值,实际上是读取指定轴的电压在通过下面的公式计算出加速度的值,公式如下:G = ((axis – vRef) / 4095) x (3.3 / 0.3663)在这个公式中axis和vRef表示通过AD转化得到的计数值,4095是一个12-bitADC的最大计数输出,3.3是H48C提供给内部的电压,0.3663是加速度1g的时候H48C输出的电压。
我们可以把公式简化成如下表达式。
G = (axis – vRef) x 0.0022引脚的定义以及说明(1)CLK 同步时钟输入(2)DIO 双向数据/从主机通信(3)Vss 电源地(0V)(4)Zero-G “自由落体”输出,高电平有效(5)CS\ 片选信号,低电平有效(6)Vdd 电源+5v标号说明最小典型最大单位V DD工作电压 4.5 5.0 5.5 V V SS地连接0 VI DD工作电流7 10 MaV IH高电压输入0.7 V DD V V IL低电压输入0.3 V DD V V OH高电压输出 4.1 V V OL低电压输出0.4 V采样率200 Sps ADC(MCP3204)分辨率12 Bit测量范围-3 +3 g敏感度366.3 mV/g精度10 %非线性度-2 +2 %工作温度范围-25 75 ℃Zero-G输出高电平 3.2 3.3 VZero-G输出延时 1 ms 确定H48C的X、Y、Z 轴如下图关于MCP3204Microchip 的MCP3204/3208 器件是具有片上采样和保持电路的12 位逐次逼近型模数(Analog-to-Digital,D)转换器。
三轴加速度传感器工作原理

三轴加速度传感器工作原理
1.介绍三轴加速度传感器
三轴加速度传感器是一种测量物体三个方向上加速度的传感器。
其工作原理基于牛顿第二定律,即物体的加速度与物体所受合力成正比,与物体质量成反比。
三轴加速度传感器可用于许多应用中,如智能手机、嵌入式系统和运动跟踪器。
2.传感器的构成
三轴加速度传感器通常由微电机系统(MEMS)制造。
传感器由一个质量极小的振动器和一对电容器组成,一般安装于一个小型IC芯片上。
当传感器受到加速度时,悬挂在振动器上的质点会偏离平衡位置。
偏离的质量会导致电容器之间的电容值发生变化,因此通过测量电容值的变化,就可以计算出物体受到的加速度。
3.工作原理
三轴加速度传感器具有三个方向的感应器,即X、Y、Z轴。
当物体受到加速度时,每个感应器所测量的电容变化量与物体的加速度成正比。
例如,当一个运动员跑步时,他会向前加速,导致X轴感应器的电容值增加。
同样,当一个物体在平面上偏离位置,Y和Z轴感应器的电容值将发生变化。
4.应用场景
三轴加速度传感器广泛应用于各种应用场景中。
在智能手机中,它们可用于自动旋转屏幕和检测手机的手持位置。
此外,在运动跟踪器中,这些传感器可以检测人们在运动时的活动量和步数。
在车辆上,它们可以用于检测车辆受到的横向和纵向加速度,以及车辆的倾斜角度。
5.结论
三轴加速度传感器是一种测量加速度的重要工具,它们可广泛应用于各种领域。
通过更好地理解其工作原理和应用,我们可以更好地利用这些传感器的优势,使人们的日常生活和工作更加舒适和高效。
三轴传感器原理

三轴传感器原理
三轴传感器利用精密的加速度计技术,能够测量物体在三个不同方向上的加速度。
它由三个互相垂直的加速度计组成,分别测量物体在x,y和z方向上的加速度。
加速度计是一种基于微机电系统(MEMS)技术的装置,它由微小的硅片和振动质量组成。
当物体在某个方向上加速时,振动质量会受到力的作用而移动,导致电荷的变化。
这个电荷变化被转化为电压信号,通过放大和电路处理后,变成数字信号。
三轴传感器将三个加速度计的输出信号进行整合,从而得到物体在不同方向上的加速度数据。
通过测量这些加速度数据,我们可以获取物体的运动状态和姿态。
例如,在移动设备中,三轴传感器可以用来检测设备的倾斜、旋转和震动,从而实现自动旋转屏幕、晃动控制等功能。
此外,三轴传感器还可与其他传感器如陀螺仪和磁力计结合使用,进一步提高姿态测量的准确性。
陀螺仪可测量物体的角速度,磁力计可测量地球的磁场方向,这些信息可以与加速度计的数据结合,提供更精确的姿态测量结果。
总之,三轴传感器利用加速度计技术,能够测量物体在不同方向上的加速度,从而实现姿态测量和运动跟踪等功能。
它在移动设备、虚拟现实、智能穿戴设备等领域具有广泛的应用前景。
三轴加速度传感器工作原理

三轴加速度传感器工作原理三轴加速度传感器是测量物体在三个空间轴上的加速度的装置。
它们通常由微机电系统(Microelectromechanical Systems, MEMS)技术制造,具有小体积、低功耗和高精度的特点。
三轴加速度传感器能够广泛应用于物体定位、动作检测和姿态测量等领域。
一个典型的三轴加速度传感器通常由三个独立的加速度传感器构成,分别对应于物体的X、Y和Z轴。
这些传感器通常是微机电系统中的压电式传感器或微机械式传感器。
压电式传感器通过压电效应来测量加速度。
当物体在一些方向上受到外力作用时,会导致传感器内的压电材料产生压电效应,从而在传感器的表面产生电荷。
这个电荷的大小与物体受到的外力的大小成正比,从而可以得到物体在该方向上的加速度。
微机械式传感器则通过物体的惯性来测量加速度。
这些传感器通常由质量块和支撑结构组成。
当物体在一些方向上受到外力作用时,质量块惯性地保持其原来的运动状态,而支撑结构则产生变形。
通过测量这种变形,可以计算出物体在该方向上的加速度。
为了得到物体在三个空间轴上的加速度,三个传感器通常被组合在一起,形成一个三轴加速度传感器。
为了减少误差和干扰,传感器通常还配备了陀螺仪和磁力计等其他传感器。
陀螺仪可以测量物体的角速度,从而提供更准确的姿态测量。
磁力计可以测量磁场的方向,从而提供具备方向信息的定位。
三轴加速度传感器在实际应用中非常广泛。
例如,它们被广泛应用于智能手机和游戏手柄中,用于检测用户的手势和动作。
它们也被用于车辆的动态稳定控制和无人机的姿态控制等领域。
此外,三轴加速度传感器还可以与其他传感器结合使用,实现更多功能,如距离测量和姿态捕捉等。
三轴加速度传感器

三轴加速度传感器1. 引言三轴加速度传感器是一种常见的传感器技术,用于测量物体的加速度和倾斜度。
它在许多领域中得到广泛应用,包括运动检测、姿态测量、智能手机和游戏控制器等设备。
本文将介绍三轴加速度传感器的工作原理、应用领域和未来发展趋势。
2. 工作原理三轴加速度传感器基于微机电系统(MEMS)技术。
它通常由微机械结构、压电材料和电路组成。
当物体受到加速度时,微机械结构会产生微小的位移,并将其转化为电压信号。
这个信号经过放大和滤波后被传感器读取和解析。
三轴加速度传感器通常包含X、Y、Z三个轴向,分别对应物体运动的水平、垂直和纵深方向。
通过测量三轴的加速度值,传感器可以确定物体的运动状态。
3. 应用领域3.1 运动检测三轴加速度传感器广泛应用于运动检测领域。
它可以测量用户的步数、距离、速度和活动强度,用于运动追踪和健身监测。
许多智能手环、智能手表和健身器材上都配备了三轴加速度传感器。
3.2 姿态测量三轴加速度传感器可以测量物体的倾斜度和方向,用于姿态测量和姿势跟踪。
它在虚拟现实、增强现实和航空航天等领域中得到广泛应用。
例如,游戏控制器可以通过传感器测量玩家的倾斜动作,并将其映射到游戏中的角色操作。
3.3 智能手机和平板电脑三轴加速度传感器是智能手机和平板电脑中的重要组成部分。
它可以实现自动屏幕旋转、姿势识别和步态分析等功能。
此外,多个传感器的组合使用,如加速度传感器和陀螺仪的联合使用,可以提供更精确的运动感知和定位能力。
4. 未来发展随着人工智能、物联网和移动技术的快速发展,三轴加速度传感器将在未来得到更广泛的应用。
以下是一些未来发展趋势:4.1 小尺寸化和低功耗随着智能设备更加轻薄和便携,对三轴加速度传感器的尺寸和功耗要求也越来越高。
未来的传感器将更加小巧,能够集成到更多类型的设备中,并且能够在较长时间内维持稳定的工作。
4.2 高精度和多参数测量未来的三轴加速度传感器将具备更高的精度和多参数测量能力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三轴加速度传感器在智能车控制与道路识别中的应用
三轴加速度传感器MMA7260Q可以测量智能车惯性大小,选取最佳重心位置,并能准确定位智能车处于直线、弯道、坡道、漂移等运行状态;利用加速度传感器能够提前预测路径,并判断何时刹车效果最佳。
并且很好的解决了在直立行走车模的平衡与方向识别。
由此提出了一种基于三轴加速度传感器在智能车中的
控制以及路径识别的设计。
该设计采用三轴加速度传感器MMA7260Q测量智能车在运动中的加速度信号,以嵌入式单片MC9S12XSl28B作为核心控制器,对加速度信号进行采样,A /D转换,再将特征数据存储在EEPROM中。
很好地解决了智能车运动路径分析的问题以及在。
实时获取小车加速度,从而更加全面的获取小车的运行状态,为控制的流畅性和更好的路况识别提供了可能。
在直立行走的车模中,应用同样的原理,选择最佳重心,可以很好地解决直立行走车模的平衡以及方向识别,从而加快车模的行车速度。
实验结果证明:结合加速度传感器具有很强的抗干扰性,提取角度信息更准确,确保了智能车在直道上能够以较高的速度行驶,在弯道则能基本不失速平滑地过弯。
1. 智能车现存问题
在车模运行当中,人无法判断小车的运行状态,使用加速度传感器来监控小车的加速度,这样可以更加精确地知道小车的运行状态,而且可以通过对某个方向加速度的变化的检测来区分出坡道和非坡道。
从而进行相应的策略应对。
避免小车在比赛时出现停车与翻车现象。
以及很好地解决了直立行走的车模中在行走过程中的平衡性。
2. MMA7260Q简介
加速度传感器是Freescale公司出品的MMA7260Q。
图1 芯片引脚定义
2.1 MMA7260Q的特性:
在一个设备中提供三轴向XYZ检测灵敏度,可选灵敏度:1.5g、2g、4g 和6g;功耗低,具有休眠模式,低压运行一般在2.2V~3.6V,能够快速启动,一般启动时间为1ms;其低噪音,封装一般为16针脚6mm x 6mm x 1.45mm无针脚型方体扁平封装(QFN)。
2.2 MMA7260Q的优点
为多功能应用提供灵活的可选量程:包括1.5g、2g 、4g 和6g;功耗低,可延长电池使用寿命开机响应时间短,最适合电池供电手持设备的休眠模式,组件数量少-节约成本和空间噪音低、灵敏度高,具有自适应功能,频率及解析度高,提供精确的坠落、倾斜、移动、放置、震动和摇摆感应灵敏度不同应用的建议重力加速度级别自由落体检测:
1g~2g 倾斜控制:1g~2g。
2.3加速度传感器应用分析
2.3.1干扰因素分析
芯片可以测试一个方向上的加速度变化。
所以采用了不同的安装方式,其间要考虑到比较多的干扰因素。
一、车体行进过程中的机械振动
二、速度控制不平滑对车体运动状态的影响
三、常规情况下的误差和正常时,加速度传感器产生的输出区别大小
2.3.2安装方式分析
若安装于安装摄像头的立杆上,杆子在小车加减速的时候有比较明显的左右晃动,通过Labview观察发现干扰过大。
若安装于小车后部,由于电机自身的振动,对MEMS产生的影响会较之前更为明显。
经测试,如果测量水平X方向的加速度,宜将装有MMA2260的电路板装载在车前部。
图二加速度传感器安装方式
若在直立行走车模上安装,则要测量竖直Z方向上的加速度。
图三直立行走车模安装示意图
2.4硬件电路设计
MMA7260Q信号采集模块设计加速度信号采集模块如图1所示。
x,y,z 3个相互垂直方向上的加速度由G-Gell传感单元感知,电容值经过容压变换器转换为电压值,经过增益放大器、滤波器和温度补偿以电压的形式作为输出信号拉J,经过放大滤波处理,将所需模拟信号调整至一个合适的范围,再转换为数字信号送数据处理单元。
图四加速度信号采集结构图
加速度传感器与单片机的接口电路MMA7260Q与
MC9S12XSl28B的硬件接口电路如图2所示。
微处理器内部包含完整的地输入缓存器、模拟开关电路、可编程增益放大器和A/D转换器以及数字滤波器,使用非常方便。
G1,G2输入低电平,灵敏度达到800 mV/g。
当Mode=l时,加速度传感器处于正常工作状态。
x,y,z输出端分别接RC滤波器,再通过高输出驱动运算放大器TLV4112构成电压跟随作用,输出稳定的直流电压信号。
图五 MMA7260Q与MC9S12XSl28B的硬件接口电路
2.5软件设计实现
本设计采用CodeWamor软件与BDM作为调试工具,编程环境支持c语言和汇编语言的程序设计,大大方便了用户的程序设计,提高了系统开发效率。
本设计程序代码使用C语言编写。
图六加速度程序流程图
2.6 A/D采样流程设计
本设计主要包括单片机初始化模块和实时路径检测模块。
1)单片机的初始化模块包括:I/O模块,AD模块,定时中断模块初始化。
2)实时路径检测模块:利用接受管,红外光电传感器和CCD摄像头检测特征信号,利用加速度传感器检测角度信号,将返回信号输入单片机的输入端口,程序不问断地读入输入端口的信号,结合判断语句,得出合适的PWM控制信号。
图七主程序与中断程序流程图
2.7实验测试
图中曲线为时间和AD采集到的数据之间的关系。
而AD 采集到的数据可以用来反映加速度的变化情况
图八装载于静止小车上时
图九装载于运动状态不变小车上时
图十小车角度变化时,加速度传感器值的变化规律
通过测试可以看出。
对于车体角度的变化,加速度传感器的值都有一定的变化。
不过同时也看到车子的振动对加速度传感器也会产生一些干扰。
在识别坡道时,如果加速度传感器监控的是竖直方向的加速度,即z方的加速度,那么在平道上时,明显竖直方向上加速度为零,在上坡后,如果忽略摩擦力,那加速度将变化为gsinθcosθ。
通过加速度传感器中加速度的变化可以容易的辨别出平道和坡道。
2.8数字滤波算法设计
由于加速度传感器三轴之间差异和较高灵敏度,防止在运动过程中由于智能车的抖动引起的误差,对单片机采样得到的电压值进行归一化处理,最后可得到各方向传感器的相对电压值。
具体实现方法:让智能车后轮转动起来,分别记录各传感器输出信号的最大值和最小值,用最大值减去最小值得到各传感器在运动过程中的输出范围。
在智能车行驶过程中将各方向传感器输出的信号值减去最小值,再除以各方向传感器的输出范围即可得到其相对输出值。
根据g1=g2=0,最小值对应着-1.5g,最大值对应着+1.5g。
,静止时各向加速度值为0,加速度范围为-1.5g一+1.5g。
2.9路径识别规则
X-T表示智能车前后方向加速度信号,Y-OUT表示智能车左右方向加速度信号,Z-T表示智能车上下方向加速度信号.采样值经过数字滤波,由于智能车的底盘不可能保持绝对水平,车身可能会向前倾斜或者向后倾斜,
所以,Y-OUT,X-OUT,Z-OUT值都有5%的误差,当处于匀速直线运动时,采样值在100~110之间波动。
通过加权平均近似为105,125对应+1.5g, 80对应-1.5g。
3 结束语
MMA 7260Q是一种电容式加速度传感器,融合了信号调理,单极低通滤波和温度补偿技术。
成本低,功耗低,测试中加速度信号稳定性与灵敏度都达到了预期的效果,从而提高了系统的控制精度,使舵机响应速度变快。
基于三轴加速度传感器在智能车的控制与路径识别的
设计,相比传统的路径识别具有数据处理简单,控制精度高的特点,使舵机响应变快。
可以广泛应用与无人驾驶智能车,智能仪表,机器人等高端技术领域。