三轴角度检测(倾角传感器MMA7455(加速度传感器))
一种基于三轴加速度传感器的倾角测量装置
g
的静态 自校 正 以及肢体 运动 姿态 检测 等实 际场合 。但 在
全量程范 围内测量精度不高 的问题较突 出。
文 中使用 A D X L 3 3 5三轴加 速 度传感 器 获取 姿态 信息 , 经
A R M 7微处 理器计算处理后 得到倾 角数 据并显 示在 1 6 0 2液 晶
0. 2。 .
Ke y wo r d s : t r i a x i l a a c c e l e r o me t e r ; t i l t ng a l e; i n t e po r l a t i o n c o mp e n s a t i o n
0 引 言
=
一
L I Z h i , WA N G D i , Y A N G H a o , Z H A N G H o n g — k u i , C H E N Y a n - j u n
( S h a n g h a i U n i v e r s i t y , S h a n ha g i Ke y L a b o r a t o r y o f Me c h a n i c a l A u t o ma t i o n nd a R o b o i t c s , S h ng a ha i 2 0 0 0 7 2 , C h i n a )
三轴加速度计的参数对比
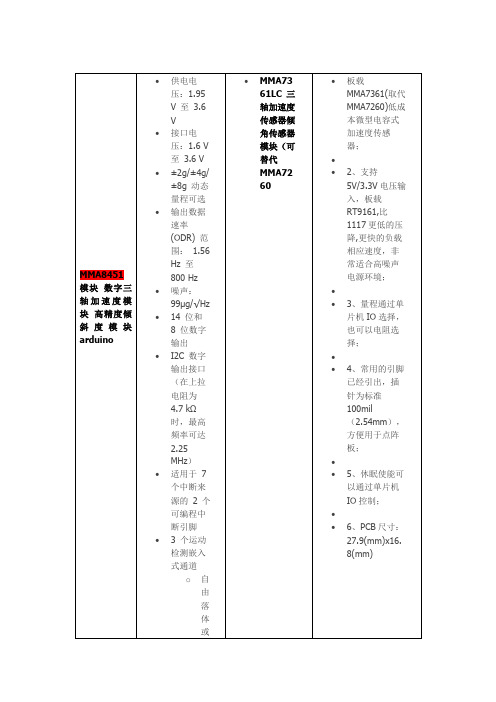
MMA8451模块数字三轴加速度模块高精度倾斜度模块arduino •供电电压:1.95V 至3.6V•接口电压:1.6 V至 3.6 V•±2g/±4g/±8g 动态量程可选•输出数据速率(ODR) 范围: 1.56Hz 至800 Hz•噪声:99μg/√Hz•14 位和8 位数字输出•I2C 数字输出接口(在上拉电阻为4.7 kΩ时,最高频率可达2.25MHz)•适用于7个中断来源的 2 个可编程中断引脚• 3 个运动检测嵌入式通道o自由落体或•MMA7361LC 三轴加速度传感器倾角传感器模块(可替代MMA7260•板载MMA7361(取代MMA7260)低成本微型电容式加速度传感器;••2、支持5V/3.3V电压输入,板载RT9161,比1117更低的压降,更快的负载相应速度,非常适合高噪声电源环境;••3、量程通过单片机IO选择,也可以电阻选择;••4、常用的引脚已经引出,插针为标准100mil(2.54mm),方便用于点阵板;••5、休眠使能可以通过单片机IO控制;••6、PCB尺寸:27.9(mm)x16.8(mm)。
MMA745xL:三轴数字输出加速度传感器
MMA745xL:三轴数字输出加速度传感器
佚名
【期刊名称】《世界电子元器件》
【年(卷),期】2010(000)009
【摘要】@@ 飞思卡尔推出MMA745xL系列,这是一款数字输出(I2C/SPI)、低功耗、紧凑型电容式微机械加速度计,具有信号调理、低通滤波器、温度补偿、自测、可配置通过中断引脚(INT1或INT2)检测Og、脉冲检测(用于快速运动检测)等功能.Og偏置和灵敏度是出厂配置,无需外部器件.客户可使用指定的Og寄存器和g-Select量程选择对Og偏置进行校准,量程可通过命令选择3个加速度范围
(2g/4g/8g).MMA745xL系列具备待机模式,使它成为以电池为电源的手持式电子
器件的理想选择.
【总页数】1页(P28)
【正文语种】中文
【相关文献】
1.数字输出三轴加速计 [J],
2.全球体积最小、功耗最低的三轴数字输出角速率传感器开始批量生产 [J],
3.美国模拟器件上市支持13bit数字输出的3轴加速度传感器 [J],
4.士兰微电子推出三轴加速度传感器和三轴磁传感器 [J],
5.支持16bit数字输出的3轴加速度传感器 [J],
因版权原因,仅展示原文概要,查看原文内容请购买。
超低功耗倾角测量仪的设计

超低功耗倾角测量仪的设计作者:穆伟平等来源:《电子世界》2013年第11期【摘要】该超低功耗倾角测量仪以TI公司的低功耗单片机MSP430G2553为控制核心,利用高精度三轴加速度传感器MMA8452测量倾角,使用低功耗段码液晶显示结果。
充电装置采用TI公司的TPS61040芯片和TPS61070芯片构成两级BOOST升压电路为电容充电。
主系统供电采用TI公司的TPS54331芯片构成BUCK降压电路,在轻载条件下仍具有较高电源效率。
为进一步实现系统的低功耗运行,每次测量后,测量仪进入低功耗待机模式,液晶屏可保持显示上次的测量结果。
该仪器实现了角度测量误差在±0.7度以内,重力加速度测量误差在±2%以内的精度。
在使用2200uF电容为仪器供电时,可工作3分钟;使用100uF电容供电时工作时间可达20秒。
【关键词】倾角测量仪;MSP430;加速度传感器;低功耗1.引言本超低功耗倾角测量仪的设计中,使用了TI公司的MSP430、TPS61070、TPS61040和TPS54331等器件和加速度传感器,实现了超低功耗高精度角度测量仪的制作。
首先,我们使用MSP430单片机,此单片机不仅具有处理能力强、运算速度快、片内资源丰富等优点,而且具有超低功耗和间歇工作的优势。
其在工作时工作电流只有200uA左右,当处于休眠状态时其工作电流在1uA左右,较好的满足了超低功耗和控制运算的需求。
在实际使用中,我们让它工作在2.5V,省电模式下RAM数据保持在低功耗模式,消耗电流仅0.1μA。
其次,设计中还使用了TI公司的芯片TPS61070和TPS61040组成两级BOOST升压电路,相对于反激式升压电路相比,该方案不但效率高,而且有利于降低电源损耗。
在选择降压电路方案中,使用了TI公司的TPS54331芯片组成BUCK降压电路。
当25V将至2.5V时普通的线性降压芯片效率只有10%,但是这块芯片在轻载情况下效率也可达到30%以上,而且功耗低。
MEMS三轴加速度传感器在飞行器姿态测量系统中的应用
• 85•MEMS三轴加速度传感器在飞行器姿态测量系统中的应用中国船舶重工集团公司第七一〇研究所 何 苗 陈金花【摘要】介绍了一种基于MEMS三轴加速度传感器和STM32处理器的飞行器姿态测量系统,阐述了倾角测量原理、系统的硬件电路设计和软件设计,并介绍了加速度传感器MMA7455的校准方法。
【关键词】MEMS;三轴加速度传感器;飞行器;姿态测量0 引言在飞行器的姿态控制过程中,获得准确的飞行姿态信息是后续对飞行器进行精确控制的重要条件。
而飞行姿态信息的获取主要是依靠加速度传感器、陀螺仪等各种传感器,本文介绍的姿态控制系统采用的是一种MEMS(微机电系统)三轴加速度传感器,通过传感器测量得到加速度数据,再根据得到的数据进行计算就可以得到飞行器的姿态角信息。
1 基本原理在地球上任何位置的物体都受到重力的作用而产生一个加速度,加速度传感器可以用来测定变化或恒定的加速度。
把三轴加速度传感器固定到物体上,当物体姿态改变时,加速度传感器的敏感轴相对于重力场发生变化,加速度传感器的敏感轴输出重力在其相应方向产生的重力分量信号。
在静止状态下,3个轴向的输出值为重力加速度分别在3个轴向的分量,输出值的大小与3个轴向跟竖直方向的夹角有关。
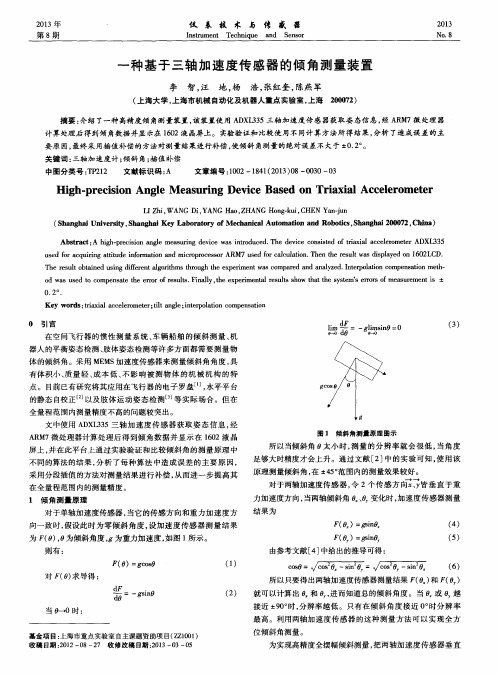
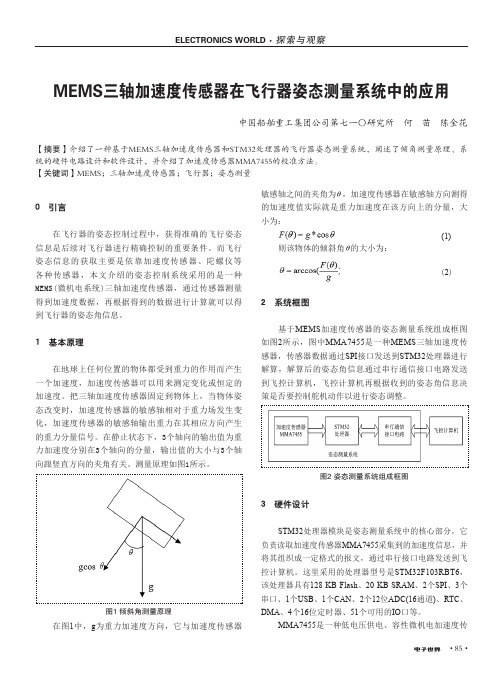
测量原理如图1所示。
图1 倾斜角测量原理在图1中,g 为重力加速度方向,它与加速度传感器敏感轴之间的夹角为,加速度传感器在敏感轴方向测得的加速度值实际就是重力加速度在该方向上的分量,大小为:(1)则该物体的倾斜角的大小为:(2)2 系统框图基于MEMS 加速度传感器的姿态测量系统组成框图如图2所示,图中MMA7455是一种MEMS 三轴加速度传感器,传感器数据通过SPI 接口发送到STM32处理器进行解算,解算后的姿态角信息通过串行通信接口电路发送到飞控计算机,飞控计算机再根据收到的姿态角信息决策是否要控制舵机动作以进行姿态调整。
图2 姿态测量系统组成框图3 硬件设计STM32处理器模块是姿态测量系统中的核心部分,它负责读取加速度传感器MMA7455采集到的加速度信息,并将其组织成一定格式的报文,通过串行接口电路发送到飞控计算机。
三轴加速度传感器

三轴加速度传感器1. 引言三轴加速度传感器是一种常见的传感器技术,用于测量物体的加速度和倾斜度。
它在许多领域中得到广泛应用,包括运动检测、姿态测量、智能手机和游戏控制器等设备。
本文将介绍三轴加速度传感器的工作原理、应用领域和未来发展趋势。
2. 工作原理三轴加速度传感器基于微机电系统(MEMS)技术。
它通常由微机械结构、压电材料和电路组成。
当物体受到加速度时,微机械结构会产生微小的位移,并将其转化为电压信号。
这个信号经过放大和滤波后被传感器读取和解析。
三轴加速度传感器通常包含X、Y、Z三个轴向,分别对应物体运动的水平、垂直和纵深方向。
通过测量三轴的加速度值,传感器可以确定物体的运动状态。
3. 应用领域3.1 运动检测三轴加速度传感器广泛应用于运动检测领域。
它可以测量用户的步数、距离、速度和活动强度,用于运动追踪和健身监测。
许多智能手环、智能手表和健身器材上都配备了三轴加速度传感器。
3.2 姿态测量三轴加速度传感器可以测量物体的倾斜度和方向,用于姿态测量和姿势跟踪。
它在虚拟现实、增强现实和航空航天等领域中得到广泛应用。
例如,游戏控制器可以通过传感器测量玩家的倾斜动作,并将其映射到游戏中的角色操作。
3.3 智能手机和平板电脑三轴加速度传感器是智能手机和平板电脑中的重要组成部分。
它可以实现自动屏幕旋转、姿势识别和步态分析等功能。
此外,多个传感器的组合使用,如加速度传感器和陀螺仪的联合使用,可以提供更精确的运动感知和定位能力。
4. 未来发展随着人工智能、物联网和移动技术的快速发展,三轴加速度传感器将在未来得到更广泛的应用。
以下是一些未来发展趋势:4.1 小尺寸化和低功耗随着智能设备更加轻薄和便携,对三轴加速度传感器的尺寸和功耗要求也越来越高。
未来的传感器将更加小巧,能够集成到更多类型的设备中,并且能够在较长时间内维持稳定的工作。
4.2 高精度和多参数测量未来的三轴加速度传感器将具备更高的精度和多参数测量能力。
三轴倾角传感器原理
三轴倾角传感器原理
三轴倾角传感器原理主要是基于其内部的三个加速度计和三个
陀螺仪来测量物体在X、Y和Z轴上的倾斜角度。
具体来说,加速度计用于测量物体在重力作用下的加速度,而陀螺仪则用于测量物体绕X、Y和Z轴的旋转率。
通过分析这三个传感器的输出信号,结合空间解析算法,可以精确地计算出物体在三维空间中的姿态和倾斜角度。
这种传感器常用于测量物体的姿态和运动状态,可以广泛应用于无人机、机器人、车辆、船舶、飞机等领域的姿态控制和运动监测。
通过三轴倾角传感器,可以获得物体在三个轴向上的倾斜角度,从而判断物体的姿态和平衡状态,为控制系统的稳定性和导航精度提供重要的数据支持。
此外,除了基于加速度计和陀螺仪的三轴倾角传感器外,还有一些其他类型的传感器,如电子罗盘、磁力计等,也可以用于测量物体的姿态和方向。
这些传感器各有优缺点,具体应用时需要根据实际需求和场景选择合适的传感器。
!基于三轴加速度传感器的跌倒检测技术的研究与应用
上海交通大学硕士学位论文基于三轴加速度传感器的跌倒检测技术的研究与应用姓名:孙新香申请学位级别:硕士专业:电子与通信工程指导教师:马伟敏;张鑫20081001基于三轴加速度传感器的跌倒检测技术的研究与应用摘要在社会逐渐走向高龄化的今天,老年人所占的比率也逐渐增加,老年人的行动安全已成为社会的重要问题。
针对老年人易跌倒的问题,除了事前的防范之外,在发生跌倒情况时,最重要的就是在第一时间内尽快送至医院,以降低伤害。
因此,建立一套完善的跌倒探测与通信系统是相当重要的。
本研究课题的目的是希望利用电子信息技术来实现对老年人身体姿态和运动的实时监控,当发生异常跌倒时,将老年人跌倒位置及时进行发布。
这样不仅可以减轻社会和子女的压力,也可以让老年人不再因为害怕跌倒而减少外出、减少活动,使他们可以更加放心的走出家门,提高老年人晚年生活的品质。
在分析比较国内外跌倒检测及相关技术的基础上,并考虑到产品的实用性和系统的成本等因素,本文设计了基于三轴加速度传感器、嵌入式单片机、CDMA无线通信和gpsOne空间定位技术的跌倒探测器。
利用三轴加速度传感器采集人体的三维加速度值,并由单片机进行分析,当探测到有异常跌倒发生时,在进行空间定位后,将发生跌倒的位置通过无线通信的方式进行发布。
如何对加速度数据进行分析并判断发生异常跌倒是本文研究的核心问题。
本文在阈值判断的基础上结合满足阈值时间点前后加速度矢量变化的过程来判定是否发生跌倒。
另外,设计中还通过报警机制来降低假阳性和假阴性。
并在跌倒检测算法的基础上实现了整个跌倒探测器的硬件和软件架构的设计。
经实验分析,本文设计的跌倒探测器可以实时探测人体姿态。
当发生跌倒时,能在20秒内判断出是否发生异常跌倒,其平均准确率为88.57%;并且在发生跌倒后,跌倒探测器将发生跌倒的位置及时进行发布。
本文的工作对解决老人的行动安全问题,构建以人为本的和谐社会有着非常积极的意义。
关键词:跌倒探测器,三轴加速度传感器,跌倒检测算法,gpsOneResearch of Fall Detection Technology based on 3-axis AccelerometerABSTRACTAs the proportion of elder people of our society grows bigger, the movement safety of elderly has become a social problem. For the people who suffer from harmful falling, one of the best steps he can take is ensuring that reliable and immediate help is available to reach him at all times. So it is very important to set up a perfect detecting and alarming system that can monitor the daily movement of the people with falling potential. The main purpose of this research is to design a realizable portable fall detection device which can measure and analysis the real-time body gesture and movement by electronic technology, and if it detects the user’s falling movement, the device can send out alarm with the user’s geographical location information to some health watch response organization. Obviously, it will be very valuable for the senior that this device can not only improve their personal independence and life quality but also reduce the pressure of their children and the society.Based on the comparison analysis of the literature about the fall detectiontechnology or associated theory, we bring out the design of fall detection device which adopts the technology of 3-axis accelerometer, embedded MCU, CDMA wireless communication and gpsOne with careful consideration of function and cost. The accelerometer measures and collects the user’s acceleration and transfer data to MCU in which an embedded algorithm analyzes the user’s movement and monitors their body status. If the device decides that the user is undergoing falling down, it will first start the function of geographical locating by gpsOne, and after that it will send out the alarm with this location information by SMS. How to assess the acceleration data, figure out the user’s movement and give out the arbitration of falling is the main problem. Furthermore, we introduce the alarm processing mechanism to decrease the possibility of false positive or false negative cases. All the fall detection algorithm and humane interface have been implemented by a practical hardware platform and the relevant embedded firmware at last.After we constructed a prototype, we design a series of experiments to evaluate its performance. The result shows that the fall detection device can measure the user’s gesture and when it detects falling movement, it can make arbitration in 20 seconds and send out an alarm with geographical location information. The average accuracy rate of the judgments is 88.57%. The successful implementation of this fall detection device will make greatcontribution to improving the personal movement safety of the elderly and be very significant for create harmonious atmosphere of our society.Keyword: Fall Detector, 3-axis accelerometer, Algorithm of Fall Detection, gpsOne上海交通大学学位论文原创性声明本人郑重声明:所呈交的学位论文,是本人在导师的指导下,独立进行研究工作所取得的成果。
部分加速度计型号参数
部分加速度计型号参数部分加速度计型号参数加速度传感器MXP7205VF MXP7205VF引脚低成本±5 G带SPI接口的双轴加速度计MXR6500G MXR6500G引脚薄型,低功耗±1.7克双轴加速度计,按比例输出KXTE9-1026 KXTE9-1026引脚±2g的三轴数字加速度计产品规格LSM320HAY30 LSM320HAY30引脚MEMS运动传感器模块的三维数字加速度计和2D间距和偏航模拟陀螺仪SCA830-D06 SCA830-D06引脚SCA830-D06单轴数字SPI接口的高性能加速度计,KXSS5-2057 KXSS5-2057引脚为±3克三轴加速度计产品规格ADIS16006 ADIS16006引脚双轴±5 g加速度计具有SPI接口的2240-002 2240-002引脚的模拟加速计模块KXP74 KXP74引脚 Kxp74系列加速度计和倾角传感器SCA3000-E01 SCA3000-E01 超低功耗引脚 SCA3000-E01 3轴加速度计,数字SPI接口KXTF9-4100 KXTF9-4100引脚±2g的三轴数字加速度计产品规格2430-002 2430-002引脚三轴模拟加速计模块KXPA4-2050 KXPA4-2050引脚±2 G三轴模拟加速度计产品规格SCA2100-D01 SCA2100-D01 SCA2100-D01 2轴加速度计,数字SPI接口引脚MXA2050A MXA2050A引脚低成本,±10 G双模拟输出三轴加速度计SCA3000-E05 SCA3000-E05 超低功耗引脚 SCA3000-E05 3轴加速度计,数字SPI接口MXR7150V MXR7150V引脚低成本?7 G按比例输出的双轴加速度计,MXR2010A MXR2010A引脚低成本,±35克双轴加速度计,按比例输出KXSC7-1050 KXSC7-1050引脚±2g的三轴模拟加速度计产品规格SCA3100-D03 SCA3100-D03 SCA3100-D03的3轴加速度计,数字SPI接口引脚MXA6500G MXA6500G引脚低成本,低噪音1 G双轴加速度计,绝对模拟输出SCA3060-D01 SCA3060-D01引脚 Sca3060-D01数位式低功率加速度计非安全关键汽车应用? 2012-002 2012-002引脚的模拟加速计模块MXD6125G MXD6125G引脚薄型,低功耗,±2 G双数字输出三轴加速度计MXR9500G MXR9500G引脚低成本±1.5 G三成比例的输出三轴加速度计KXTE9-2050 KXTE9-2050引脚±2g的三轴数字加速度计产品规格KXSS5-4457 KXSS5-4457引脚为±3克三轴加速度计产品规格2264-005 2264-005引脚的模拟加速计模块KXP84 KXP84引脚 Kxp84系列加速度计和倾角传感器SCA3100-D04 SCA3100-D04 SCA3100-D04 引脚高性能3轴加速度计,数字SPI接口SCA820-D04 SCA820-D04引脚 Sca820-D04 1轴高性能加速度计,数字SPI接口2460-002 2460-002引脚三轴模拟加速计模块格SCA820-D03 SCA820-D03引脚 Sca820-D03单轴加速度计,数字SPI接口BU-21771-000 BU-21771-000引脚BU系列加速BU-21771-000ADXL202E ADXL202E引脚低成本?2 G,占空比输出的双轴加速度计MXD2020E MXD2020E引脚超低噪声,低失调漂移±1 G双数字输出三轴加速度计KXR94-1050 KXR94-1050引脚±2g的三轴加速度计产品规格SCA3100-D07 SCA3100-D07 SCA3100-D07 引脚高性能3轴加速度计,数字SPI接口MX205Q MX205Q引脚低成本,5.0G,双模拟输出三轴加速度计ADXL202 ADXL202引脚低成本?2 G双轴加速度计,占空比输出MXR7250VW MXR7250VW引脚低成本±5 G双轴加速度计,按比例输出MXR6400Q MXR6400Q引脚超高性能为±1g双轴加速度计,按比例输出KXSD9-2050 KXSD9-2050引脚±2g的三轴数字加速度计产品规格SCA2100-D02 SCA2100-D02 SCA2100-D02 引脚 2轴高性能加速度计,数字SPI接口ADIS16003 ADIS16003引脚双轴±1.7 g加速度计具有SPI接口的2220-002 2220-002引脚的模拟加速计模块KXD94-2802 KXD94-2802引脚±10克三轴加速度计产品规格SCA3000-D02 SCA3000-D02引脚SCA3000-D02低功耗3轴加速度计,数字I 2 C接口KXTF9-1026 KXTF9-1026引脚±2g的三轴数字加速度计产品规格2422-002 2422-002引脚三轴模拟加速计模块KXPA4-1050 KXPA4-1050引脚±2 G三轴模拟加速度计产品规格SCA2110-D03 SCA2110-D03引脚 Sca2110-D03 2轴加速度计,数字SPI接口ADXL105 ADXL105引脚的高精度61克到65克单轴iMEMS加速度计与模拟输入KXPS5-2050 KXPS5-2050引脚±2g的三轴加速度计产品规格AIS326DQ的AIS326DQ引脚MEMS惯性传感器的3轴,带有数字输出的低g加速度计SCA3000-E04 SCA3000-E04 超低功耗引脚 SCA3000-E04 3轴加速度计,数字SPI接口? BU-23173-000 BU-23173-000引脚 BU系列加速BU-23173-000ADXL210E ADXL210E引脚低成本?10 G双轴加速度计,占空比MXD6125Q MXD6125Q引脚超高的性能为±1g双轴加速度计的数字输出KXR94-2353 KXR94-2353引脚±2g的三轴数字加速度计产品规格MXA2500J MXA2500J引脚超低成本,1.0 G绝对值输出的双轴加速度计,SCC1300-D04 SCC1300-D04引脚 Scc1300-D04组合的陀螺仪和3轴加速度计,数字SPI接口? 2010-002 2010-002引脚数字加速计模块MXP7205VW MXP7205VW引脚低成本±5 G带SPI接口的双轴加速度计MXR9150G MXR9150G引脚低成本±5克三成比例的输出三轴加速度计KXTE9-1050 KXTE9-1050引脚±2g的三轴数字加速度计产品规格KXSS5-3028 KXSS5-3028引脚为±3克三轴加速度计产品规格2260-002 2260-002引脚的模拟加速计模块KXP74-1050 KXP74-1050引脚±2g的三轴数字加速度计产品规格SCA3000-E02 SCA3000-E02引脚 SCA3000-E02的3轴加速度计,数字I 2 C接口超低功耗? 2440-002 2440-002引脚三轴模拟加速计模块KXPB5-2050 KXPB5-2050引脚±2 G三轴加速度计产品规格SCA830-D05 SCA830-D05引脚SCA830-D05单轴加速度计,数字SPI接口ADXL190 ADXL190引脚低成本6100 G单轴加速度计的模拟输出MXC62020GP MXC62020GP引脚低功耗,薄型±2 G双I 2 C接口的三轴加速度计KXPS5-4457 KXPS5-4457引脚±3G的三轴加速度计产品规格CMA3000-D01 CMA3000-D01引脚 CMA3000-D01的3轴超低功耗加速度计,数字SPI和I 2 C接口MXR7305VF MXR7305VF引脚改进的低成本±5 G双成比例的模拟输出三轴加速度计MXR6150M MXR6150M引脚薄型,低功耗±5g的双轴加速度计,按比例输出KXSD9-1026 KXSD9-1026引脚±2g的三轴数字加速度计产品规格SCA2120-D07 SCA2120-D07引脚 Sca2120-D07 2轴加速度计,数字SPI接口MXD202 MXD202引脚低成本,2.0G,双数字输出三轴加速度计SCA3060-D02 SCA3060-D02引脚 Sca3060-D02数位式低功率加速度计非安全关键汽车应用? 2210-002 2210-002引脚的模拟加速计模块KXD94 KXD94引脚 KXD94系列加速计和倾斜计SCA3000-D01 SCA3000-D01引脚SCA3000-D01低功耗3轴加速度计,数字SPI接口KXTE9-4100 KXTE9-4100引脚±2g的三轴数字加速度计产品规格ML8953 ML8953 的3轴加速度计的数字量输出引脚数据KXR94-2283 KXR94-2283引脚,多项数据表为±2G三轴的加速度计产品规格2420-002 2420-002引脚三轴数字加速计模块KXP94 KXP94引脚 Kxp94系列加速度计和倾角传感器SCA2120-D05 SCA2120-D05引脚 Sca2120-D05 2轴加速度计,数字SPI接口ADXL05 ADXL05引脚 61 G 65 G的单芯片加速度计与信号调理2470-002 2470-002引脚三轴模拟加速计模块KXPS5-1050 KXPS5-1050引脚±2g的三轴加速度计产品规格AIS226DS AIS226DS引脚 MEMS惯性传感器的2轴,低g加速度计的数字量输出SCA810-D01 SCA810-D01引脚 Sca810-D01单轴加速度计,数字SPI接口BU-23842-000 BU-23842-000引脚BU系列加速BU-23842-000MMA7455 MMA7455 MMA7455引脚 3轴加速度计模块ADXL50 ADXL50引脚单片加速度传感器与信号调理MXD6025Q MXD6025Q引脚超低噪声,低失调漂移±1 G双数字输出三轴加速度计KXR94-2050 KXR94-2050引脚±2g的三轴加速度计产品规格MPXY8300 MPXY8300引脚根部分号码汽车压力范围卡车轮胎压力范围压力范围压力传感器精度* Z-轴加速度计测量范围Z-轴加速度计精度X轴加速度计测量范围X轴加速度计精度AcceleMXA2500G MXA2500G引脚改进,超低噪声1.7克双轴加速度计具有绝对的输出SCC1300-D02 SCC1300-D02引脚 Scc1300-D02组合的陀螺仪和3轴加速度计,数字SPI接口? ADXL210 ADXL210引脚低成本?10 G双轴加速度计,占空比1221L-002 1221L-002引脚的低噪声模拟加速度计引脚 1.5克MMA7368L MMA7368L三轴低g微机械加速度计LIS2L06AL LIS2L06AL引脚MEMS惯性传感器的2轴- + / - 2g/6g超小型线性加速度计ADXL327 ADXL327引脚小尺寸,低功耗,3轴±2 g加速度计MMA7330L MMA7330L引脚4克,12克三轴低g微机械加速度计MMA7341LC MMA7341LC引脚 3G,11克三轴低g微机械加速度计4203 4203引脚型号4203加速度计MMA2300 MMA2300引脚表面贴装微机械加速度计MLX90308 MLX90308引脚可编程的通用传感器接口MMA1220KEG MMA1220KEG引脚低g微机械加速度计LIS3L02AS5 LIS3L02AS5引脚 MEMS惯性传感器3轴- ?2g/6g 线性加速度计MMA3201D MMA3201D引脚表面贴装微机械加速度计MMA6261Q MMA6261Q的引脚 Mma6261q加速度传感器MMA8452Q MMA8452Q,,引脚 3轴,12-bit/8-bit,,数字加速度计3031-050 3031-050引脚型号3031加速度计4610-020-060 4610-020-060引脚型号4610加速度计MMAS40G10D MMAS40G10D引脚微机械加速度计SCA610-CAHH1G SCA610-CAHH1G引脚SCA610-cahh1g 1轴模拟测斜仪MAX1459 MAX1459引脚 MAX1459 2线,4-20mA的智能信号调理KXRB5-2050 KXRB5-2050引脚,多项数据表为±2G三轴的加速度计ADXL335 ADXL335引脚小尺寸,低功耗,3轴±3 g加速度计MMA1270KEG MMA1270KEG引脚飞思卡尔半导体技术资料MMA2204KEG MMA2204KEG引脚表面贴装微机械加速度计LIS2L01 LIS2L01引脚,多项数据表的惯性传感器2axis/1g线性加速度计MMA2204D MMA2204D引脚表面贴装微机械加速度计HMR3400 HMR3400引脚数字罗盘解决方案QA-1400 QA-1400引脚加速度计具有成本效益级惯性传感器ADXL213 ADXL213引脚低成本±1.2克双轴加速度计4655-020 4655-020引脚型号4655加速度计4801A 0010 4801A-0010引脚型号4801a加速度计MMA1212 MMA1212引脚表面贴装微机械加速度计BMA145 BMA145引脚 Bma145数据表B Bma145三轴模拟加速度传感器LIS344AL的LIS344AL引脚MEMS惯性传感器的3轴超小型线性加速度计ADXL150 ADXL150引脚 65克到650克,低噪声,低功耗,单/双通道轴的iMEMS?加速度计MMA2260D和 MMA2260D引脚 1.5克X-轴微机械加速度计MMA2301KEG MMA2301KEG引脚表面贴装微机械加速度计LIS352AX的 LIS352AX引脚 MEMS惯性传感器的3轴- ±2g的绝对模拟输出加速度计1203-1000-10-072X 1203-1000-10-072X引脚型号1203加速度计MMA1212D MMA1212D引脚表面贴装微机械加速度计MLX90308CAB MLX90308CAB引脚可编程传感器接口52M30-2000-360 52M30-2000-360引脚型号52m30加速度计ADXL323 ADXL323引脚小尺寸,低功耗,2轴±3 GI MEMS加速度计MLX90308CCC MLX90308CCC引脚可编程传感器接口MMA7341L MMA7341L引脚 3G,11克三轴低g微机械加速度计LIS2L02AQ LIS2L02AQ引脚惯性传感器2axis - 2g/6g线性加速度计ADXL345 ADXL345引脚三轴±2/4/8/16g数字加速度计MMA2244EG MMA2244EG引脚低g微机械加速度计MMA6341L MMA6341L引脚 3G,11克两轴低g微机械加速度计LIS302SG LIS302SG引脚 MEMS运动传感器的3轴- ?2G模拟输出短笛加速度计4000A-020-060 4000A-020-060引脚型号4000A加速度计MMA1201P MMA1201P引脚微机械加速度计ADXL193 ADXL193引脚单轴,高g,公司的iMEMS加速度计MMA7660FC MMA7660FC引脚 3轴方向/运动检测传感器LIS3L02AQ3 LIS3L02AQ3引脚 MEMS惯性传感器的3轴- 2G /6克线性加速度计ADW22035 ADW22035引脚精度±18 G Single-/dual-axis iMEMS加速度计MMA7360L MMA7360L引脚 1.5G,6克三轴低g微机械加速度计MAX1166 MAX1166引脚低功耗,16位模拟数字转换器,并行接口MMA6851QR2 MMA6851QR2引脚单轴SPI惯性传感器NJU7029 NJU7029引脚低噪声,轨至轨输出双通道CMOS运算放大器4602-010-060 4602-010-060引脚型号4602加速度计MMA6270Q MMA6270Q引脚 R1.5 G - 6 G双三轴低g微机械加速度计SCA610-C23H1A SCA610-C23H1A引脚的 SCA610-c23h1a单轴模拟加速度计ADIS16355, ADIS16355引脚三轴惯性传感器ADXL312 ADXL312引脚三轴,±1.5g/3g/6g/12g数字加速度计MMA2202KEG MMA2202KEG引脚表面贴装微机械加速度计LIS3L02AQ LIS3L02AQ引脚惯性传感器3轴- 2g/6g线性加速度计MMA2202D MMA2202D引脚表面贴装微机械加速度计BU1511KV2 BU1511KV2引脚事件数据记录系统LSIQA3000-030 QA3000-030引脚的 Q-Flex QA-3000加速度计ADS8201 ADS8201引脚 2.2V至5.5V,低功耗,12位,100ksps时,与PGA和SPI?接口的8通道数据采集系统3058-010-P 3058-010-P引脚型号3058加速度计4623-025-060 4623-025-060引脚型号4623加速度计XMMA1000P XMMA1000P引脚微机械加速度计LIS244AL LIS244AL引脚 MEMS运动传感器的2轴- ?2克超小型线性加速度计KXPS5 KXPS5引脚加速度计和倾角传感器ADIS16354 ADIS16354引脚高精度三轴惯性传感器MMA7261QT和 MMA7261QT引脚 2.5G - 10G三轴低g微机械加速度计MMA6222AKEG MMA6222AKEG引脚模拟双轴微机械加速度计“惯性传感器LIS3L02AS LIS3L02AS引脚 3轴- 2g/6g线性加速度计MMA1210D MMA1210D引脚表面贴装微机械加速度计HMC1055 HMC1055引脚 3轴罗盘传感器集QA-700 QA-700引脚加速度计的经济温度补偿传感器ADXL320 ADXL320引脚小而薄的±5 G iMEMS加速度计834M1-2000, 834M1-2000引脚型号834m1加速度计MMA2260 MMA2260引脚 1.5克X-轴微机械加速度计LIS332AR LIS332AR引脚 MEMS运动传感器的3轴±2 G模拟输出超小型加速度计LIS3LV02DL LIS3LV02DL引脚 MEMS惯性传感器的3轴-2G /??6克数字输出低电压,线性加速度计MMA1270D MMA1270D引脚低g微机械加速度计MMA2244KEG MMA2244KEG引脚低g微机械加速度计LIS33DE LIS33DE引脚 MEMS运动传感器的3轴- ±2克/±8G智能数字输出“纳米”加速度1207F-1000 1207F-1000引脚型号1207f加速度计MMA1200D MMA1200D引脚表面贴装微机械加速度计邢树村整理:TEL:189********。
mma7455
mma7455概述MMA7455是一款数字输出微型三轴加速度传感器。
该传感器采用微机电系统(MEMS)技术制造,能够测量在X、Y 和Z轴上的加速度。
这使得MMA7455在许多应用中具有广泛的用途,例如智能手机、游戏控制器、导航系统、运动跟踪器等。
本文档将提供关于MMA7455的详细信息、特性和操作指南,以帮助用户理解和使用该传感器。
特性•数字输出:MMA7455通过I2C或SPI接口提供数字输出,方便集成到各种系统中。
•三轴测量:MMA7455能够同时测量X、Y和Z轴上的加速度,提供全方位的加速度信息。
•高精度:传感器具有高分辨率和低噪声,能够精确测量微小的加速度变化。
•低功耗:MMA7455在运行时的功耗非常低,适用于需要长时间运行的电池供电设备。
•内置自检和故障检测:传感器具有自检功能,可以通过检测偏差和校准误差来检查传感器的运行状态。
接口和引脚配置MMA7455有多种接口和引脚配置可供选择,包括I2C和SPI接口。
用户可以根据自己的需求选择适合的接口类型。
以下是MMA7455的引脚配置:•VDD:供电引脚,连接到正向电源。
•VSS:地引脚,连接到地线。
•SDA:I2C数据引脚,用于数据传输。
•SCL:I2C时钟引脚,用于同步数据传输。
•INT1/INT2:中断引脚,用于传感器事件的触发。
•CS:SPI片选引脚,用于SPI模式下的数据通信。
功能寄存器MMA7455具有一组功能寄存器,以实现不同的操作和配置。
下面是一些常用的寄存器和其功能的示例:1.MODE寄存器:用于选择传感器的工作模式,例如传感器的分辨率、采样速率等。
2.XYZ_DATA寄存器:用于读取传感器测量的X、Y和Z轴方向上的加速度数据。
3.CTRL寄存器:用于配置传感器的电源模式、敏感度调整等参数。
4.STATUS寄存器:用于检测传感器的运行状态,例如是否发生自检、是否存在故障等。
请参考MMA7455的数据手册了解更多寄存器及其功能的详细信息。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
#include <reg52.h>#include <intrins.h> //要用到_nop_();函数#define uchar unsigned char#define uint unsigned int/***************************************************************************/ /*********** 单片机引脚定义 ************/ /***************************************************************************/ sbit sda=P1^0; //I2C 数据传送位sbit scl=P1^1; //I2C 时钟传送位char x,y,z,num[9]={0,0,0};/****************************************************************************** //********** 数据部分 ***********//****************************************************************************** /#define IIC_READ 0x1D //定义读指令#define IIC_WRITE 0x1D //定义写指令#define LCD_data P0 //数据口sbit inter_0=P3^2;sbit LCD_RS = P2^7; //寄存器选择输入sbit LCD_RW = P2^6; //液晶读/写控制sbit LCD_EN = P2^5; //液晶使能控制sbit LCD_PSB = P2^4; //串/并方式控制void delay_1ms(uint x){uint i,j;for(j=0;j<x;j++)for(i=0;i<110;i++);}/*******************************************************************//* *//*写指令数据到LCD *//*RS=L,RW=L,E=高脉冲,D0-D7=指令码。
*//* *//*******************************************************************/void write_cmd(uchar cmd){LCD_RS = 0;LCD_RW = 0;LCD_EN = 0;P0 = cmd;delay_1ms(5);LCD_EN = 1;delay_1ms(5);LCD_EN = 0;}/*******************************************************************/ /* */ /*写显示数据到LCD */ /*RS=H,RW=L,E=高脉冲,D0-D7=数据。
*/ /* */ /*******************************************************************/ void write_dat(uchar dat){LCD_RS = 1;LCD_RW = 0;LCD_EN = 0;P0 = dat;delay_1ms(5);LCD_EN = 1;delay_1ms(5);LCD_EN = 0;}/*********************************************************//* *//* 设定显示位置 *//* *//*********************************************************/void lcd_pos(uchar X,uchar Y){uchar pos;if (X==0){X=0x80;}else if (X==1){X=0x90;}else if (X==2){X=0x88;}else if (X==3){X=0x98;}pos = X+Y ;write_cmd(pos); //显示地址}/*******************************************************************//* *//* LCD初始化设定 *//* *//*******************************************************************/ void lcd_init(){LCD_PSB = 1; //并口方式write_cmd(0x30); //基本指令操作delay_1ms(5);write_cmd(0x0C); //显示开,关光标delay_1ms(5);write_cmd(0x01); //清除LCD的显示内容delay_1ms(5);}uchar set_key_sign; //是否在设置状态标志uchar delaysign; //视觉停留标志uchar xposivalue; //x正方向满格显示g值uchar xnegavalue; //x反方向满格显示g值uchar yposivalue; //y正方向满格显示g值uchar ynegavalue; //y反方向满格显示g值//11111111 11111110 11111100 --- 10000000 00000000 led_ma[i]:i为亮灯数量uchar led_ma[9]={0xff,0xfe,0xfc,0xf8,0xf0,0xe0,0xc0,0x80,0x00};uchar xposiupstate; //x正方向上8个LED显示状态uchar xposidownstate; //x正方向下8个LED显示状态uchar xnegaupstate; //x反方向上8个LED显示状态uchar xnegadownstate; //x反方向下8个LED显示状态uchar yupstate; //y方向上8个LED显示状态uchar ydownstate; //y方向下8个LED显示状态uchar xposilightnum; //x正方向亮灯数量(1——16)uchar xnegalightnum; //x反方向亮灯数量(1——16)uchar yposilightnum; //y正方向亮灯数量(1——8)uchar ynegalightnum; //x正方向亮灯数量(1——8)uchar ack_sign; //I2C 应答标志/**************************************************************************/ /************ 各延时程序 **************/ /**************************************************************************/ void iic_delay() //5us延时{_nop_();_nop_();_nop_();_nop_();}void delay_50us(uint t){uchar j;for(;t>0;t--)for(j=19;j>0;j--);}void delay_50ms(uchar t){uint j;for(;t>0;t--)for(j=6245;j>0;j--);}/*********************************************************************//************** I2C通信部分 ***************//*********************************************************************/void iic_start() //函数功能:I2C通信开始{sda=1;iic_delay();scl=1;iic_delay();sda=0;iic_delay();}void iic_stop() //函数功能:I2C通信停止{sda=0;iic_delay();scl=1;iic_delay();sda=1;iic_delay();}void iic_ack() //函数功能:I2C通信查应答位{sda=1;scl=1;iic_delay();ack_sign=sda;scl=0;}void iic_write_byte(uchar wdata)//函数功能:向I2C从机写入一个字节{uchar i,temp,temp1;temp1=wdata;for(i=0;i<8;i++){scl = 0;iic_delay();temp=temp1;temp=temp&0x80;if(temp==0x80)sda=1;elsesda=0;iic_delay();scl=1;iic_delay();scl=0;iic_delay();temp1=temp1<<1;}}char iic_read_byte(void) //函数功能:从I2C从机中读出一个字节{uchar x;char data_data;for (x=0;x<8;x++){data_data=data_data<<1;sda=1;iic_delay();scl=0;iic_delay();scl=1;iic_delay();if(sda==1)data_data|=0x01;//else// data_data&=0xfe;}return data_data;}void iic_write(uchar byte_add,uchar wdata)//函数功能:按地址写入一字节数据{uchar t;t=(IIC_WRITE<<1);iic_start();iic_write_byte(t);iic_ack();iic_write_byte(byte_add);iic_ack();iic_write_byte(wdata);iic_ack();iic_stop();}char iic_read(uchar byte_add) //函数功能:按地址读出一字节数据{uchar t;char x;t=(IIC_WRITE<<1);iic_start();iic_write_byte(t);iic_ack();iic_write_byte(byte_add);iic_ack();t=((IIC_READ<<1)|0x01);iic_start();iic_write_byte(t);iic_ack();x=iic_read_byte();iic_ack();iic_stop();return x;}void main(){delay_1ms(10); //延时 lcd_init();delay_1ms(5);iic_write(0x16,0x5);iic_write(0x10,0x32);//校正X值iic_write(0x12,0x62);//校正Y值delay_50ms(20);while(1){x=iic_read(0x06);y=iic_read(0x07);z=iic_read(0x08);num[0]=x/100;num[1]=x/10%10;num[2]=x%10;num[3]=y/100;num[4]=y/10%10;num[5]=y%10;num[6]=z/100;num[7]=z/10%10;num[8]=z%10;lcd_pos(0,0);write_dat(num[0]+48); delay_1ms(5); write_dat(num[1]+48); delay_1ms(5);write_dat(num[2]+48); delay_1ms(5);lcd_pos(1,0);write_dat(num[3]+48); delay_1ms(5); write_dat(num[4]+48); delay_1ms(5);write_dat(num[5]+48); delay_1ms(5);lcd_pos(2,0);write_dat(num[6]+48); delay_1ms(5); write_dat(num[7]+48); delay_1ms(5);write_dat(num[8]+48); delay_1ms(5);}}。