基于查表方式的雷达波束扫描技术
雷达相控阵天线与扫描技术
雷达相控阵天线与扫描技术
雷达相控阵天线是一种由许多小型天线单元组成的天线阵列,
它们可以通过控制每个天线单元的相位和幅度来实现波束的电子扫描。
相控阵天线的主要优势在于它可以实现快速、精确的波束控制,从而提高雷达系统的灵活性和性能。
相控阵天线的扫描技术包括机械扫描和电子扫描。
机械扫描是
通过机械装置使整个天线阵列旋转或者倾斜,从而改变波束的方向。
这种方法已经过时,因为它的速度慢、可靠性低,而且难以适应现
代雷达系统对快速、多方向扫描的需求。
电子扫描是相控阵雷达的核心技术之一,它通过控制每个天线
单元的相位和幅度来实现波束的快速、精确控制。
相比机械扫描,
电子扫描具有更快的响应速度、更高的精度和更好的可靠性。
在电
子扫描中,天线单元的相位和幅度可以通过相控阵天线的控制单元
实现动态调节,从而实现对波束方向的灵活控制。
相控阵雷达的扫描技术还包括波束形成和波束跟踪。
波束形成
是指通过合成相位控制实现对波束方向和形状的控制,而波束跟踪
则是指通过不断调整相位控制来跟踪目标。
这些技术使得相控阵雷
达能够实现快速、精确的目标探测和跟踪,从而在军事、航空航天和气象等领域发挥重要作用。
总的来说,雷达相控阵天线与扫描技术的发展使得雷达系统具有了更高的灵活性、精度和可靠性,为各种应用领域带来了巨大的技术进步和应用前景。
雷达波束扫描方式
雷达波束扫描方式
雷达波束扫描是指雷达系统将辐射能量或接收能量的方向集中在一个特定的方向上,以实现对目标的探测、跟踪和测量。
以下是几种常见的雷达波束扫描方式:
1. 机械扫描(Mechanical Scanning):机械扫描是通过物理旋转或摆动天线来改变辐射或接收能量的方向。
这种扫描方式包括水平扫描和垂直扫描。
机械扫描方式简单可靠,但扫描速度较慢,适用于低频率和中频率雷达系统。
2. 电子扫描(Electronic Scanning):电子扫描是通过控制阵列天线的相位和幅度来改变辐射或接收能量的方向,而无需物理运动。
电子扫描可以实现快速、精确的波束指向和波束切换,适用于高频率雷达系统。
- 相控阵扫描(Phased Array Scanning):相控阵是由许多单元天线组成的阵列,通过控制每个单元天线的相位和幅度来实现波束的指向和扫描。
相控阵扫描具有快速、灵活的扫描能力,适用于需要快速目标跟踪和多任务处理的雷达系统。
- 电子扫描天线(ESA):电子扫描天线是一种特殊设计的天线,通过调整阵列中不同单元的相位和幅度来实现电子扫描。
电子扫描天线能够实现更广泛的扫描范围和更快的扫描速度。
3. 机动扫描(Mechanical-Electronic Scanning):机动扫描是将机械扫描和电子扫描相结合的一种扫描方式。
通常,机械扫描用于快速粗略的扫描,而电子扫描用于更精细的扫描和跟踪。
这些是常见的雷达波束扫描方式,不同的扫描方式适用于不同的应用场景和雷达系统要求。
每种扫描方式都有其优缺点,需要根据具体需求进行选择和配置。
简述基于FPGA的相控阵雷达波束控制系统设计
简述基于FPGA的相控阵雷达波束控制系统设计发布时间:2023-03-02T05:40:51.232Z 来源:《科技新时代》2022年第19期作者:刘倩刘璐璐[导读] 波速控制系统是相控阵雷达的重要组成部分,其主要功能是控制相控阵天线波束的指向变化。
FPGA的雷达刘倩刘璐璐陕西黄河集团有限公司设计研究所陕西西安 710043摘要:波速控制系统是相控阵雷达的重要组成部分,其主要功能是控制相控阵天线波束的指向变化。
FPGA的雷达播控系统设计方法的提出能够解决目前相控阵雷达播控系统的处理速度问题,由于相控阵雷达接接杰出的性能,当前被应用于多个领域中。
本文先对波束控制系统进行介绍,然后阐述几种常用波束控制系统的常用方法,通过对比选取最终设计。
关键词:FPGA;相控阵雷达;波束控制系统与其他雷达相比,相控阵雷达的天线波束扫描的快速性、灵活性,波束控制系统的组成不是一成不变,其是由各种因素所决定,包括天线单元数的多少、技术进步、移相器负载的差异等。
主要是由波控主机与子阵运算处理模块,波控主机是波束控制的关键部分,能够实现接收控制信号,有工作方式命令字、频率点指令、定时信号等。
波控系统的基本功能是对天线波束的定位,就是根据波控主机提供的指向信息,将子阵模块指向信息转为移相器的控制信号,即波控码的计算过程,因此,非常有必要对波控码的计算过程进行研究,才能够实现波控系统。
一、FPGA概述FPGA即现场可编程门阵列,其是在PAL、GAL、CPLD等可编程器件的基础上进一步发展的产物,属于集成电路的一种,其能够克服传统电路的各类缺点,是一种适合现代科技发展需要的电路,克服了以前可编程器件门电路数有限的缺点,还解决了定制电路的不足,对其开发配置,能够完成任何数字电路能完成的功能,例如,CPU、74系列电路等。
其主要由六部分所组成,即可编程输入/输出单位、基本可编程逻辑单元、嵌入式块RAM、丰富的布线资源、底层嵌入功能单元与内嵌专用硬核等[1]。
雷达波束扫描方式
雷达波束扫描方式全文共四篇示例,供读者参考第一篇示例:雷达技术是一种利用电磁波进行探测、识别和跟踪目标的技术,是目前广泛应用于军事、航空、气象等领域的重要工具。
而雷达波束扫描方式是一种常用的雷达工作方式,通过不同的扫描方式可以实现对目标的全方位覆盖和跟踪,提高雷达系统的性能和灵活性。
雷达波束扫描方式主要有机械扫描和电子扫描两种类型,二者各有优缺点,可以根据具体需求选择使用。
机械扫描是通过旋转天线或倾斜天线来实现波束的扫描,具有较高的可靠性和稳定性,但速度较慢,适用于需要长时间连续监测的应用场景。
而电子扫描是通过控制阵列天线的相位和幅度来实现波束的快速转向,具有快速响应和精确控制的优势,适用于需要快速目标跟踪和定位的应用场景。
在雷达波束扫描方式中,还有一种常见的方式是扇形扫描和连续扫描。
扇形扫描是将波束沿着一个扇形范围内进行快速扫描,可以覆盖更广的区域,适用于大范围目标搜索和监测。
而连续扫描则是将波束连续地在一个方向上进行扫描,可以实现对目标的持续跟踪和定位,适用于需要精准目标追踪的应用场景。
除了以上所述的常见雷达波束扫描方式外,还有一些新型的扫描方式正在逐渐发展和应用。
多波束扫描方式可以同时利用多个波束对目标进行扫描,提高了雷达系统的目标检测和跟踪能力;自适应扫描方式则可以根据目标的特性和环境条件自动调整波束参数,提高了雷达系统的适应性和灵活性。
雷达波束扫描方式是提高雷达系统性能和灵活性的重要手段,不同的扫描方式可以根据具体需求进行选择和应用。
随着雷达技术的不断发展和创新,相信在未来雷达波束扫描方式将会得到更广泛的应用和进一步的完善,为各个领域的应用带来更多的便利和效益。
第二篇示例:雷达技术是一种利用无线电波来探测远距离目标的技术,而雷达波束扫描方式则是一种常见的雷达扫描方式,它通过旋转或移动天线来实现对周围环境的全方位覆盖和目标探测。
在本文中,我们将对雷达波束扫描方式进行详细介绍,并探讨其在现代雷达系统中的应用。
雷达波束扫描功能的软件实现技术
(.N tnl soo i l be aoy B n 002, ia 2 ai t nmc sr tr, e g10 1 C n ) o Ar a aO v h
沙 晶 晶 , 孔德 庆 施浒 立 。
( .杭州电子科技大学机 电工程学院, 杭州 30 1 ) 1 10 8
( .中国科学院国家天文台 2 北京 10 1 ) 002
摘 要: 雷达测定 目标的方向是利用天线波束的扫描 来实现的。在对传统机械扫描、 电扫描方法简要分 析的基础上, 根据软件机械的设计理念… , 出了两种雷达波束扫描功能的软件 实现 方法——软件移 提
0 引 言
雷达是发现 目标特别是空问 目标的装置 , 除了测
机“ 空警 一 00 等。这些新型雷达在探测范围, 向 20 ” 测 精度 、 抗干扰能力、 分辨力 、 测速度等方面都有 了大 探 幅度的提高。近几年来 D P技术 的快速发展为雷达 S
定 目标的距离 , 还要测定 目 标的方向 , 即方位角和俯仰
Ab ta t T edrcin o d rT re sg t y a tn a b a s a nn .Af ra ayig teta io a - sr c : h i t fRa a ag t o n e n e m c n ig e o i b t n lzn h rdt n lme e i c a i sa nn n lcrnc s a nn to sb e y w ot r e i t n meh d ,ta ssf ae h nc c n iga d ee t i c n ig meh d r f ,t o sf o il wae ra z i to s h ti ot r - l ao w p aes i ig a d s ailse t let t n ae po o e c odn o ted s n p i sp y o h ot re h s -hfn n p t p cr si i rp sd a c rig t h ei hl o h fte sf t a a ma o r g o wa ma hn r T esf r e l ain c at sas rsn e .Smuainrs l h w ep p sd sf rera- c iey. h ot erai t h r lop ee td i lt eut s o t r oe ot wa z o i o s h o wa e l i t nmeh d a e i h n t n o a a e m c nn l. z i to sC ra z te f ci frd b a sa igwe1 ao n l e u o r n Ke r s sf r c ie ;b a c nn ;sf rep ae s i ig p t l p crlet t n y wo d :ot ema hn r wa y e m s a ig ot n wa - h s-hfn ;s ai e ta s mai t as i o
基于SOPC的波控系统设计
式 中的  ̄= , , o 0 ‘ 为校正值。 o p ’
△P ( = n 0 ( 3 )
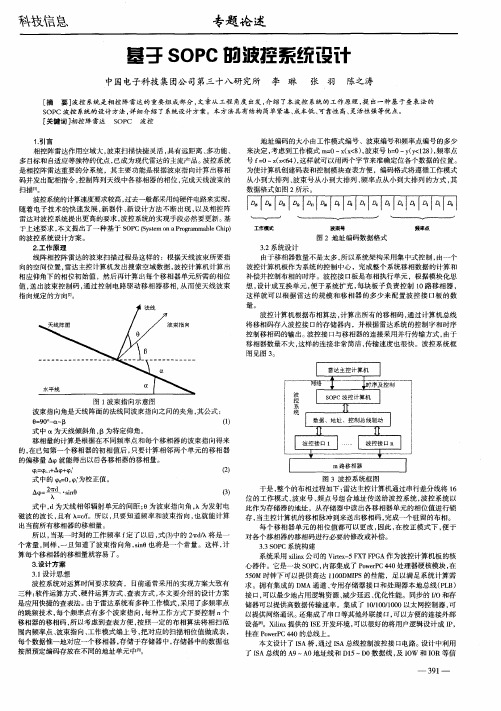
式 中, 为天线相邻 辐射单元 的间距 ; d 0为波束指 向角 , 为发射 电 磁波 的波长 , 且有 h e 。所 以 , =/ f 只要知道频率和波束指 向 , 也就能计 算 出当前所有移相器的移相量。 所 以, 当某一 时刻的工作频率 f 了以后 , 3中的 2 dh将是 一 定 式() v/ 个常量 , 同样 , 一旦知 道了波束指 向角 , n 也 将是一个常量 。这样 , s0 i 计 算每个 移相器的移相量就容易了。 3设计 方案 . 31 .设计思想 波控 系统对运算 时间要 求较高 ,目前通 常采用 的实现方案大致有 三种 : 软件运算方式 、 硬件运算 方式 、 查表方式 , 文要介 绍的设计方案 本
由于移相 器数量不是太 多 , 所以系统架构采用集 中式控制 , 由一个 波控计 算机板作为 系统的控制中心 ,完成整个系统移相数据 的计 算和 补偿并控制布相 的时序 。波控接 口板是布相执行单元 ,根据模块化 思 想, 设计成互换 单元 , 于系统扩充 , 便 每块 板子负责控制 1 O路移相器 , 这 样就可 以根据雷 达的规模 和移相 器 的多少来 配置波 控接意 图 波束指 向角是天线 阵面 的法线 同波束指 向之 间的夹角 , 其公式 :
0 9 。c ] = 0 - ̄ 3 - () 1
式 中 O为天线倾 斜角 , 为特定仰 角。 L 1 3 移相量的计算是根据在不 同频率 点和每个移相器 的波束指 向得来 的, 已知第一个移相器 的初相值后 , 在 只要计算相邻两个单元 的移相器 的偏移量 △p ‘就能得出 以后各移相器的移相量 。
雷达信号处理中的波束成形技术

雷达信号处理中的波束成形技术雷达(Radar)是一种使用电磁波探测目标的技术。
雷达可以通过探测的反射信号来确定目标的位置、速度以及其它的特征。
为了获取可靠的雷达反射信号并且削弱干扰信号,波束成形技术在雷达的信号处理中是非常重要的。
波束成形技术(Beamforming)是使用多个微弱信号源来合成更强的信号的一种技术。
在雷达中,固定多个天线元件,可以形成一个虚拟的天线阵列。
从每个天线元件接收到的反射信号被送入一个复杂的算法中,根据目标的位置和方向在虚拟的天线阵列中形成一束较强的电磁波。
由于不同的目标反射信号不同,因此波束成形技术需要正确地合成信号以便在最佳情况下进行目标探测。
在雷达信号处理中,波束成形技术通常被分为两类:波束定向和波束形成。
波束定向波束定向(Beam Pointing)是一种将雷达的信号聚焦在特定方向上的技术。
这种技术通常使用于跟踪运动目标的雷达系统中。
由于目标的移动,雷达系统需要调整波束的方向以便在最佳情况下接收目标的反射信号。
波束定向通常使用机械或电子方式来实现。
机械波束定向使用旋转天线的方式来调整波束的方向。
当天线旋转时,天线会扫描一定的角度范围内的目标,但这种方式的波束成形速度相对慢。
电子波束定向则使用相位延迟器来调整不同天线的接收信号相位,这样即可精确地调整波束的方向。
电子波束定向可以实现快速响应但是价格较高。
波束形成波束形成(Beam Forming)是一种将多个反射信号合成成一个较强信号的技术。
这种技术通常被使用在静止目标的雷达系统中,它可以形成一个具有良好方向性的波束。
波束形成通常使用基于信号处理的方式来计算出波束的权重和相位。
最终,所有反射信号的成分都被合成成一个方向性很强的波束。
由于信号处理的速度较快,因此波束形成相对于波束定向实现得更加快速。
研究表明,波束成形技术在雷达信号处理中非常重要。
利用波束成形技术可以精确地探测目标,削弱干扰信号,并且提高雷达系统的灵敏度。
测绘技术中的波束形成与合成孔径雷达技术
测绘技术中的波束形成与合成孔径雷达技术随着科技的不断进步,测绘技术在现代社会中扮演着十分重要的角色。
而在测绘技术中,波束形成与合成孔径雷达技术被广泛应用于地球观测和地图制作等领域。
本文将从波束形成与合成孔径雷达技术的基本概念、原理及其在测绘技术中的应用等方面进行探讨。
首先,我们来了解波束形成技术。
波束形成是指通过调控天线阵列内各个单元天线的相位和幅度,使得它们在特定方向上形成一个窄束。
与传统的单天线或固定阵列相比,波束形成技术具有更高的方向性,能够提高雷达检测的精度和灵敏度。
波束形成技术可以通过调整天线的发射相位和幅度来实现,从而使得天线阵列向特定方向发射或接收信号。
这种技术的应用使得测绘的范围进一步扩大,能够获取更多的地理信息。
接下来,我们来探讨合成孔径雷达(SAR)技术。
合成孔径雷达是一种能够通过合成成像来获得高分辨率雷达图像的技术。
SAR技术利用飞行器或卫星上的雷达向地表发射连续的射频信号,并接收被地表物体散射回来的信号。
通过采集多个不同位置接收到的雷达回波数据,使用信号处理算法将这些数据合成成一张高分辨率的雷达图像。
这样的图像能够反映地表物体的形状和特征,为地图制作和测绘提供了重要的数据源。
波束形成与合成孔径雷达技术的结合,使得地球观测和地图制作取得了重大的突破。
首先,通过波束形成技术,可以实现对地表目标的精确定位,提高图像的分辨率。
具体来说,通过调节天线阵列内各个单元天线的相位和幅度,使得发射的波束聚焦在目标上,从而获取更加清晰的图像信息。
这为解析度更高的地图制作提供了可靠的技术手段。
其次,合成孔径雷达技术的应用,使得地球观测和地图制作能够跨越时间和空间的限制。
通过利用大量的SAR数据,可以实现连续观测同一地区的变化情况,如土地利用的动态变化、地表沉降的监测等。
同时,由于合成孔径雷达技术能够穿透云层和雨带,以及对地表目标进行高分辨率的成像,因此即使在恶劣的天气条件下,也能够获取到高质量的地表图像。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
上位机发数据到驱动器 SN65LBC175 的 RX + 和 RX - 端口,端口之间加 100 欧匹配电阻,Rx + 端 加 1000 欧上拉电阻,Rx - 端加 10K 欧下拉电阻,经 过信号转换器变换成 3. 3V 电平输入到 FPGA。FPGA 输出信号到驱动器 SN65LBC174,产生 Tx + 和 Tx - 差分对信号,端口之间加 100 欧匹配电阻,Tx +
1 系统分析
波束控制系统接收上位机的控制命令,解析后 根据算法实时计算或查表法得出波束指向控制码 值,实现对天线的 T / R 组件布相控制,完成对 T / R 组件、变频组件及阵面电源数据、状态采集并上报。 波控单机的原理框图如图 1 所示:
收稿日期: 2014-9-2 基金项目: 国家科技部世博行动计划资助项目,上海世博会重点项目( O91901A01N) 作者简介: 郭立俊( 1980 - ) ,男,高工。主要研究方向为雷达监控及浮空器测控。
0 引言
随着雷达、电子战、通信技术的发展,相控阵电 子信息系统 已 成 为 雷 达、电 子 战、通 信 等 发 展 的 主 流,在相控阵系统中波束控制技术作为关键技术之 一,直接影响着系统功能和效能的发挥[1]。天线波 束控制系统,不仅要为相控阵雷达天线扫描提供正 确的相位码,而且也要满足系统探测的要求,使波束 指向能够快速、灵活的转换,因此,相控阵雷达波束 控制系统设计的好坏,对整个雷达系统能否具备更 加强大的功能,能否更好地实现其性能指标,是至关 重要的,因此,波束控制系统的性能优劣将极大影响 了相控阵雷达系统性能的发挥[2 - 3]。
[4] 张光义. 相控阵雷达系统[M]. 北京: 国防工 业出版社,1994.
[5] 陈海荣. 基于双核 PowerPC 处理器的高性能 计算模块设计[J]. 计算机测量与控制,2011, ( 11) : 233 - 236.
( 上接第 64 页)
[3] LINZ A. ,HENDRICKSON A. Efficient implementation of an I - Q GMSK modulator [J]. IEEE Transactions on circuits and systems, 1996,43( 1) : 14 - 23.
换时间不大于 0. 5ms; 二系统要小型化设计。基于 这两点要求,首先系统单机采用小型化设计,使用集 成度比较高的可编程逻辑器件,此外,95% 以上的元 器件都采用表贴封装,减小体积与重量。波位切换 时间指的是波控单机接收到上位机控制命令到波束 转换完成并提供给 T / R 组件之间的时间,响应时间 包括数据解析时间、查表时间及并串转换时间。
【摘要】相控阵雷达波束控制系统的性能极大地影响雷达功能的发挥,采用查表法完成雷达天线波
束快速布相,具有速度快、移相精度高、控制灵活及便于扩展等特点,在相控阵雷达波束控制中应用
广泛。
关键词: 相控阵雷达; 波束控制; 查表法; 计算法
中图分类号: TN95
文献标志码: A
文章编号: 1008-8652( 2015) 01-075-04
图 8 波控时序仿真图
综上所述,采用小型化、模块化查表设计方案的 波控系统,已在整机试飞中得到验证,证明方案切实 可行,并具有设计简单、实现速度快等特点。本方案 适用于 T / R 组件规模较 小 系 统,对 待 规 模 较 大 系 统,需要将控制单机模块化分类,进行分布式设计方 案,采用组块方法并行控制,实现快速大规模查表法 完成波控码值调度任务。
[4] I. S. Gradshteyn and I. M. Ryzhik. Table of Integrals,Series and Products. New York: Academic,1980,p. 633,5. 41.
[5] Alfredo Linz,Alan Hendrickson. Efficient Implementation of an I - Q GMSK Modulator. IEEE Transactions on circuits and system,1996,43
异步串口构建原理图见图 4 所示,所用差分接 口器件包括 SN65LBC175 和 SN65LBC174。
图 4 PowerPC 嵌入式系统 UART 构建原理图
端加 1000 欧上拉电阻,Tx - 端加 10K 欧下拉电阻, 完成 UART 电路的合理化设计。
波控单机异步串口 RS422 主要完成与上位机 通信的,通过接收上位机的码表信息及控制命令,完 成波控单机本地时序生成,根据时序读取内存波控 码值。
76
火控雷达技术
第 44 卷
与外围的配置电路、接口芯片及电源系统完成整个 硬件组成。上位机与波控单机完成整机数据通信及 控制命令传输任务,当波控单机接收到波控码值后, 将数据按地址信息存储于 Flash 存储器,完成码表 的本地保存任务。当开始雷达扫描任务时,将上位 机发送的扫描角度、扫描模式、扫描步进信息进行解 析,换算出本地码表的地址信息,按照既定的时序完 成码值读取与解算。
波控 单 机 码 值 存 储 包 括 FLASH 存 储 方 式 和 RAM 存储方式,上电时,波控数据表从上位机传输 到波控单机,并存储在 FLASH 中。波束指向方位为 + 45 度 ~ - 45 度,步进为 0. 5 度,共 180 个码值,移 相码为 32 位,共 48 个 TR 组件,因此需要的 FLASH 空间为: 32 ·180 ·48 = 276480bit,FLASH 采用 Atmel 公司生产的 AM29LV128MH93REI,含 128Mbit, 能够满足波控码值的存储要求。在波控单机进行波 束控制时,FPGA 从 FLASH 中读取码值数据并暂存 在 FPGA 内部 RAM 中,并从 RAM 中调取码值信息 进行波束调度。 2. 3 异步串口设计
图 1 波束控制原理框图
波束控制是波控单机最重要的功能,为实现波 束的无惯性扫描、天线的快速校正和配合天线的高 效测试,单元根据任务系统的指令控制完成 T / R 组 件的幅度、相位、工作状态控制; 幅相补偿值的计算 与存储等功能。控制流程见图 2 所示:
2 工程设计
2. 1 响应时间计算 根据机载雷达对波控系统的要求,一要波位切
Radar Beam Scanning Technique Based on Look - Up Table Method
Guo Lijun ( The No. 38 Research Institute of CETC,Hefei 230088) Abstract: Beam steering control performance of phased array radar greatly impacts on radar function. Adopting look - up table method to accomplish phase distribution can be widely used in beam steering control of phased array radar,this method features high - speed,high phase shifting accuracy,good operate agility and easy to expand. Keywords: phased array radar; beam steering control; look - up table method; calculation method
参考文献:
[1] 林桂道. 现代相控阵系统的波束控制设计分 析[J]. 船舶科学技术,2007,29( 3) : 74 - 78.
[2] 郑清,张健. 相控阵雷达分布式波控系统设计 [J]. 现代雷达,2001( S1) : 51 - 53.
[3] 丁鹭飞. 雷达原理[M ]. 西安: 西北电讯工程 学院出版社,1983.
3) 波控码值为 32 位,打码时钟频率为 1M,因此 串并转换时间为: 32 × 1us = 32us。
因此,理论时间 = 0. 5us + 0. 5us + 32us = 33us, 远小于响应时间 0. 5ms 的要求。 2. 2 波控码值存储
存储器 构 建 原 理 图 见 图 3 所 示; FLASH 采 用 Intel 公司 28F128J3 芯片[5],存储空间 128Mbit。
图 2 波束控制流程图由图 可知,硬件主要由 FPGA 芯片构成,通过
图 3 PowerPC 嵌入式系统存储器构建原理图
第1 期
郭立俊: 基于查表方式的雷达波束扫描技术
77
电源有核电压输入 VCC 和 IO 电源输入 VCCQ, 供电电压 为 3. 3V; 设 备 地 址 FLASH _ A[23: 0]的 FLASH_A0 为字节选择地址信号,FLASH_A[23: 1] 地 址 输 入 信 号,由 此 可 以 判 断 存 储 器 容 量 为 128Mbit,同时 FLASH_A23 经过电阻上拉到 3. 3V 电 源,所有地址信号管脚都连接到 FPGA,高字节数据 总线和低 字 节 数 据 总 线 综 合 起 来 形 成 FLASH _ D [15: 0]连接到 FPGA,输出使能信号 OE#和写使能 信号 WE#分别连接到 FPGA,字节使能信号 BYTE#、 片选信号 CS#及复位信号 RST#经过上拉电阻到 3. 3V 电压,然后连到 FPGA。
波束控制系统是相控阵雷达的重要组成部分, 相控阵天线是以数字式移相器实现天线波束的高速
电控扫描,充分利用天线波束扫描快速、合理地分配 能量,无需天线的机械扫描也可以方便地实现波束 方向的改变[4]。
在进行波束扫描控制时,需要对偏移量进行实 时补偿,具 体 做 法 有 两 种 方 式,一 是 采 用 实 时 计 算 法,将补偿角度叠加到波控移相器; 另一种是将偏移 量形成表格文件,采用实时查表法,本文采用查找表 方式完成雷达波束控制。