单片机应用技术课件第三章
《单片机应用技术》课件

CHAPTER
02
单片机硬件结构
单片机的基本组成
运算器
用于执行算术和逻辑运算的部 件。
控制器
控制单片机各部件协调工作的 中心部件。
存储器
存储程序和数据的部件。
输入/输出接口
实现单片机与外部设备进行数 据交换的部件。
单片机的引脚与封装
引脚
单片机上用于与其他电路连接的接口 。
封装
将单片机芯片封装起来的壳体,便于 安装和连接。
工业自动化控制系统
工业自动化控制系统是单片 机应用的另一个重要领域, 通过单片机实现对生产设备 的自动化控制,提高生产效 率和产品质量。
工业自动化控制系统可以实 现的功能包括:自动化流水 线控制、工业机器人控制、 电机驱动与控制等。
单片机在工业自动化控制系 统中主要负责接收和处理各 种传感器和设备的信息,根 据预设的程序逻辑进行控制 ,并通过通信接口与其他设 备进行信息交互。
智能工业控制
单片机在工业自动化领域的应用将更 加广泛,提高生产效率和产品质量。
单片机与其他技术的融合发展
与传感器技术的融合
单片机可以与传感器技术结合,实现各种物理量的测量和智能化 处理。
与云计算技术的融合
通过云计算技术,可以实现单片机的远程监控和管理,提高数据处 理能力。
与人工智能技术的融合
单片机可以作为人工智能技术的硬件基础,实现各种智能化应用。
单片机的应用领域
总结词
智能仪表、工业控制、智能家居、通 信设备
详细描述
单片机被广泛应用于智能仪表、工业 控制、智能家居、通信设备等领域, 如智能电表、智能家居控制系统、智 能路由器等。
单片机的发展历程
总结词
4位单片机、8位单片机、16位单片机、32位单片机
单片机 第三章课件
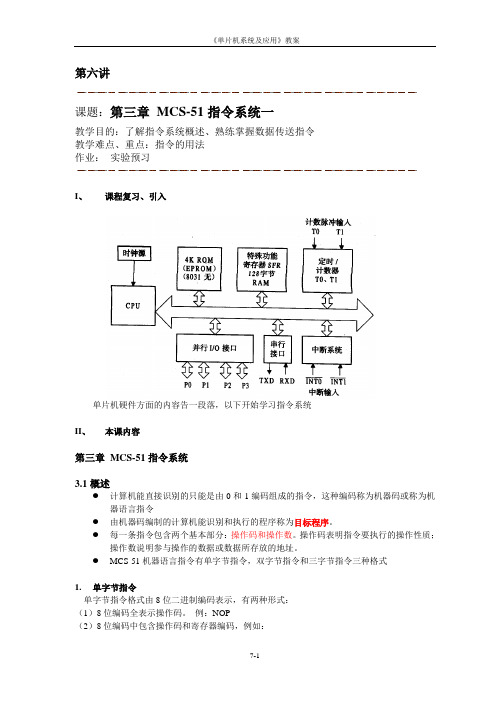
第六讲课题:第三章MCS-51指令系统一教学目的:了解指令系统概述、熟练掌握数据传送指令教学难点、重点:指令的用法作业:实验预习I、课程复习、引入单片机硬件方面的内容告一段落,以下开始学习指令系统II、本课内容第三章MCS-51指令系统3.1概述●计算机能直接识别的只能是由0和1编码组成的指令,这种编码称为机器码或称为机器语言指令●由机器码编制的计算机能识别和执行的程序称为目标程序。
●每一条指令包含两个基本部分:操作码和操作数。
操作码表明指令要执行的操作性质;操作数说明参与操作的数据或数据所存放的地址。
●MCS-51机器语言指令有单字节指令,双字节指令和三字节指令三种格式1.单字节指令单字节指令格式由8位二进制编码表示,有两种形式:(1)8位编码全表示操作码。
例:NOP(2)8位编码中包含操作码和寄存器编码,例如:MOV A ,Rn 11101xxx xxx=0~72.双字节指令MOV A, # DATA 74H DATA 三字节指令三字节指令格式中第一个字节为操作码,其后两个字节为操作数。
例如:MOV direct, #DATA 75H direct DATA一条汇编语言指令中最多包含 4 个区段, 如下所示:[标号:]操作码助记符[操作数][,操作数][;注释]例:START: MOV A, #0F0H ;将F0H赋值给A寄存器4 个区段之间要用分隔符分开:标号与操作码之间用“:”隔开,操作码与操作数之间用空格隔开,操作数与注释之间用“;”隔开, 如果操作数有两个以上,则在操作数之间要用逗号“,”隔开(乘法指令和除法指令除外)。
注意:所有标点、空格都不能是中文标点!::;;,,3.2 寻址方式●有操作数的指令中,操作数可能在指令、寄存器、存储器、I/O接口中●地址:寄存器,存储器和I/O接口进行的编号寄存器一般可以用寄存器名表达I/O接口和程序存储器以及外部数据存储器用16位地址表达内部RAM用8位地址表达●指令中所规定的寻找操作地址的方式称为寻址方式。
C51单片机应用与C语言程序设计第三章讲解精品PPT课件
任务三 用函数调用简化运动程序
• main函数是不能被其它函数调用的,那它的返回值类型int是怎么 回事呢?
– 其实不难理解,main函数执行完之后,它的返回值是给操作系统的。 虽然在main函数体内并没有什么语句来指出返回值的大小,但系统默 认的处理方式是:当main函数成功执行,它的返回值为1;否则为0。
© 2008 Open-Tech. All rights reserved. 2021/1/31
任务一 基本巡航动作
• 命令组合,让机器人向前走、左转、右转和向后走。
– 源程序请参照教材第39页的ForwardLeftRightBackward.c。
• 尝试1个轮子不动,另一个轮子全速旋转,从而以一个轮子 为支点,原地旋转。
© 2008 Open-Tech. All rights reserved. 2021/1/31
任务三 用函数调用简化运动程序
• 下边的Forward函数可以使机器人向前运动1.5秒。该函数是无形参、无 返回值的函数,没有太大的使用价值。
void Forward(void) {
int i; for(i=1;i<=65;i++)
void Forward(int PulseCount,int Velocity) /* Velocity should be between 0 and 200 */ {
• 无论机器人要执行何种动作,都离不开前面讨论的各种基本动作。为了 各种应用程序方便使用这些基本动作程序,你可以将这些基本动作放在 函数中,供其它函数调用来简化程序。
© 2008 Open-Tech. All rights reserved. 2021/1/31
任务三 用函数调用简化运动程序
单片机原理及其应用课件--第三章
扬州大学
@——间址寄存器或基址寄存器的前缀, 如 @Ri,@DPTR。 / —— 位操作数的前缀,表示对该位操作数取反, 如 /bit。 ×——片内RAM的直接地址或寄存器。 (×)——由×寻址的单元中的内容。 ——箭头左边的内容被箭头右边的内容所代替。
返回本节
26
单片机原理及其应用
扬州大学
3.3.2 数据传送类指令
32
单片机原理及其应用
扬州大学
5.以DPTR为目的操作数
MOV DPTR,#data16 例如执行 MOV ;DPTR← #data16
DPTR,#2000H 后,
(DPTR)= 2000H。
33
单片机原理及其应用
MOV direct,A MOV direct,direct MOV direct,Rn MOV direct,#data MOV direct,@Ri ; direct ← (A) ; direct ←(direct) ; direct ← (Rn) ; direct ← #data ; direct ← ((Ri))
单片机原理及其应用
扬州大学
单片机原理接口及其应用
(Principle and Application of Single Chip Microcomputer)
1
单片机原理及其应用
扬州大学
第1章 第2章 第3章 第4章 第5章 第6章 第7章 第8章 第9章
概述 MCS-51单片机硬件结构 MCS-51寻址方式和指令系统 MCS-51汇编程序设计 中断系统 定时器/计数器及串行口 存储器扩展 接口电路扩展 应用举例
15
程序存储器
DPTR 2000H A 10H
2000H
单片机原理及应用 课件 第03章

5
变址寻址 程序存储器(@A+PC,@A+DPTR)
6
相对寻址 ROM256B范围(基址PC+偏移)
7
位寻址
内部RAM的20H~2FH 可位寻址的SFR
例:判断下列指令的寻址方式
§3.2指令系统概要
MOV A, R0;(R0)A
每条指令由两部分组成: 操作码:指令的功能
MOV P0, A;(A) P0口
操作数:指令的操作对象(地址或数字) 一、指令系统分类
MOV A, 40H;(40H)A
共111种指令,按功能分为5类
MOV A, P0;(P0口) A
数据传送(29条) 算术操作(24条)
MOV A, @R0;((R0))A
逻辑操作(24条) 控制转移(17条)
MOVX A, @DPTR;((A)+(DPRT) A
第三章 8051指令系统
§3.1 8051寻址方式(7种)
序号
寻址方式 寻址存储器空间
1
寄存器寻址 R0~R7(Rn) A,B,DPTR
2
直接寻址
内部RAM(低128B) 特殊功能寄存器(SFR)
3
寄存器间接 内部RAM(@R0,@R1,@SP)
寻
址 外部RAM(@R0,@R1,@DPTR)
4
立即数寻址 程序存储器ROM中的常数(#data)
CLR bit;(bit)0
双机器周期(24/fosc)41%
CLR C; (Cy)0
两条指令是4个机器周期
二、汇编语言中常用符号
符号
意义
说明
Rn
当前寄存器
R0~R7
@Ri direct
单片机应用技术第3章课件资料

单片机应用技术(C51语言版)(第4版)
第3章 C51基础和汇编程序设计
3.6 单片机C51数据类型
1.字符类型char 2.整型int 3.长整型long 4.浮点型float 5.指针型 6.位标量bit 7.特殊功能寄存器sfr 8.16位特殊功能寄存器sfr16 9.可寻址位sbit
单片机应用技术(C51语言版)(第4版)
第3章 C51基础和汇编程序设计
3.1.2 编制程序的流程图
1. 程序流程图的作用
2. 程序流程图的组成
单片机应用技术(C51语言版)(第4版)
第3章 C51基础和汇编程序设计
3.1.3 单片机51系列的伪指令
(1)起始地址伪指令ORG。 (2)汇编结束伪指令END。 (3)赋值伪指令EQU。 (4)定义字节伪指令DB。 (5)定义字伪指令DW。 (6)数据地址赋值伪指令DATA。 (7)位地址赋值伪指令BIT。
单片机应用技术(C51语言版) (第4版)
主 编 刘华东 电子工业出版社
第3章 C51基础和汇编程序设计
内容提要
1.讲解单片机汇编语言程序设计基础、汇编语言格式、伪指令,进一 步熟悉汇编语言和机器语言之间的关系,掌握人工汇编程序的方法。 2.单片机汇编语言程序结构:顺序程序、分支程序、循环程序、子程 序,查表程序和散转程序及其设计方法。 3.现阶段单片机C语言C51应用日新月异,甚至直接学习C51,本章系 统介绍C51语言基础知识,同时从第2章开始给予大量C51程序和例子 ,并通过实训任务工单方式循序渐进的学习掌握C51语言。
单片机应用技术(C51语言版)(第4版)
第3章 C51基础和汇编程序设计
3.5 单片机C51语言程序设计基础 3.5.1 C语言与C51语言简介
单片机原理与应用第3章课件

相对寻址示意图
注意:在相对寻址方式时,在rel为正数和负数两种不同情况下, 目的地址PC的求法可以用下列不同的公式求:
当rel为正数时, PC目的=PC当前+当前指令字节数+rel
当rel为负数时, PC目的=PC当前+当前指令字节数+rel-100H
在人工汇编时,往往知道PC目的和PC当前,需要求rel,如果 PC目的>PC当前,采用第一个公式;如果PC目的≤PC当前,采用第二个公式。
立即数寻址示意图
3.2.3 寄存器寻址
寄存器寻址(register addressing)方式在指令中指出了参 与运算的操作数所在的寄存器,操作数 存储在寄存器中。寄存器寻址方式中的 寄存器为工作寄存器R0~R7、DPTR、累 加器A、寄存器B(仅在乘除法时)和布尔 累加器C。
例如: MOV A,R0 ;(A)←(R0) 该指令执行的操作是把工作寄存器 R0中的数送到累加器A中,若R0寄存器 单元中的内容是55H,则该指令执行后A 的内容就是55H。
源操作数
机器语言指令格式 (1)单字节指令格式:操作码 【例】汇编语言指令 ADD A,R0 对应的机器语言是:
28 (2)双字节指令格式:操作码 操作数 【例】汇编语言指令 ADD A,#31H 对应的机器语言是:
24 31 (3)三字节指令格式:操作码 第一操作数 第二操作数 【例】汇编语言指令 MOV 30H,#7AH 对应的机器语言是:
3.2.7 位寻址
位寻址就是对内部RAM和特殊功能寄存器的可寻址位的内容进行操 作的寻址方式。这种寻址方式只是对指令指定的1位进行操作,其寻址 方式与直接寻址方式相同。 【例】如果A=74H,则执行指令
SETB ACC.3 后,A=7CH,见下图。
(单片机完整课件PPT)第三章

寻址范围包括:
(1)内部RAM中的位寻址区。位有两种表示方法,例如, 40H;另一种是单元地址加上位,例如,(28H).0,指 的是28H单元中的最低位。它们是等价的。 (2)特殊功能寄存器中的可寻址位
可寻址位在指令中有如下4种的表示方法:
a. 直接使用位地址。例如PSW.5的位地址为0D5H。
b. 位名称的表示方法。例如:PSW.5是 F0 标志位,可使 用F0表示该位。 c.单元地址加位数的表示方法。例如 :(0D0H).5。 d.特殊功能寄存器符号加位数的表示方法。例如:PSW.5。
课堂练习:
指出下列指令中划线的操作数的寻址方式: Mov r0,#60h Mov a,30h Mov a, @r0 Movc a, @a+dptr Cjne a,#00h,one Cpl c Mov c,30h
如: MOV
A,Rn
;(Rn)→A,n=0~7
表示把寄存器Rn的内容传送给累加器A
寻址范围:ACC,B,DPTR,PSW,R0~R7,C
三、存储器寻址 寻址空间:64K 外RAM、64K ROM、128B 内RAM
1.直接寻址方式
操作数直接以单元地址的形式给出: MOV A,40H 寻址范围:内部RAM的256个单元 2.寄存器间接寻址方式 寄存器中存放的是操作数的地址 在寄存器的名称前面加前缀标志“@” 如: MOV A,@Ri ;i=0或1
单片机原理与应用技术
厦门理工学院电子与电气工程系 陈志英
第3章 单片机汇编语言编程技术
机器语言:是计算机可以识别和直接执行的语言,它是由一 组二进制代码组成。 汇编语言:是用助记符代替机器语言的操作码,用16进制 数代替二进制代码。 高级语言:是采用类似自然语言并与具体计算机类型基本无
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(1)系统复位中断
系统复位中断源包括:BOR、 POR和PUC
Table 5. Interrupt Sources, Flags, and Vectors of MSP430F663x Configurations
(2)非屏蔽中断(Non)Maskable Interrupts (NMls) NMI不能被通用中断使能位GIE( general interrupt enable)屏蔽,但可被其各自的中断使能位
屏蔽,430支持2种非屏蔽中断:系统非屏蔽中断SNMI (system NMI)和用户非屏蔽中断
UNMI (user NMI ). When an NMI interrupt is accepted, other NMIs of that level are automatically disabled to prevent nesting of consecutive NMIs of the same level. Program execution begins at the
(4)中断服务函数 中断服务函数:与硬件相关联,在一定条件下才能进入,中断服务函数必须预设中断条件。
普通函数:相当于子程序,可以写到主函数里面去。
#pragma vector = 中断矢量变量 __interrupt void 函数名(void) {
函数变量定义
函数执行语句 } 其中: 中断矢量变量:说明了该中断服务函数对应的中断向量表中的中断地址,查对应头文件得到。 __interrupt:说明了是中断服务函数。 C430中,断点保护和现场保护由编译器自动完成。
轮询方式和中断方式
中断方式的优点:
①中断方式下,单片机可选择特定的中断进行响应和处理,可通过相应的中断使能位来使 能系统希望响应和处理的中断而屏蔽不需要响应和处理的中断。轮询方式下,单片机必须 响应和处理每一个设备。 ②中断方式下,若有多个中断同时发生,单片机可根据中断优先级或程序设定来优先响应 和处理某一中断。轮询方式下,单片机逐一对设备进行访问,没有优先顺序之分。 ③中断方式解决了快速主机与慢速设备的数据传送问题。CPU能够及时处理应用系统的随 机事件,增强系统的实时性。 ④中断方式下,CPU不必查询和等待外设工作状态,可分时为多个设备服务,提高了 CPU的 工作效率和“并行”工作能力。 ⑤中断方式下,CPU具有处理设备故障、掉电等突发性事件的能力,可通过中断服务程序
(3)可屏蔽中断Maskable Interrupts 可屏蔽中断由具有中断能力的外设产生,每个可屏蔽中断都可被一个中断使能位单 独关闭,所有的可屏蔽中断可被SR中的GIE位关闭。 使能总中断(可屏蔽中断)5种方式 ① _enable_interrupts(); ② __bis_SR_register(GIE); ③ __enable_interrupt(); ④ _BIS_SR(GIE); ⑤ _EINT(); ① _disable_interrupts(); //见intrinsics.h-本征函数,用于底层控制 //见intrinsics.h //见in430.h-本征函数,用于底层控制 //见in430.h //见in430.h //见intrinsics.h
将需要保存的数据及时保护起来,电源正常后再将其恢复,提高了系统的可靠性。
2 中断系统
1 中断系统
2.1 基本概念
中断:是CPU对系统发生的某个事件作出的一种反应。中断可以人为 设定,也可以是为响应突发性随机事件而设置。通常有I/O设备、信 息故障源等。
中断系统:实现中断功能的部件,包括中断装置和中断 请 求
中断响应
断点 继 续 执 行 事 件 A
A
中 断 服 务
中断返回
中断系统功能:
① 中断优先级排队——通过硬件电路 或软件查询实现。 ② 中断响应——CPU执行完当前指令后 响应中断请求,包括保护断点、保 护现场、执行ISR。 ③ 中断嵌套——CPU响应某一中断时, 在开总中断的前提下若有其他中断 发生,CPU将中断当前ISR,执行新 的ISR。 ④ 中断返回——恢复现场、恢复断点, 继续执行原主程序。
2.2 中断处理过程
(1)中断请求 对可屏蔽中断:When an interrupt is requested from a peripheral and the
peripheral interrupt enable bit and GIE bit are set, the ISR is requested.
以下中断源可产生SNMI:
①
Power Management Module (PMM) SVML/SVMH supply voltage fault
②
③ ④
PMM high/low side delay expiration
Vacant memory access JTAG mailbox (JMB) event
中断请求:CPU在执行某一事件A的过程中,由于系统内、外的某种原 因,发生了另一事件B请求CPU迅速去处理。 中断源:能发出中断请求,引起中断的装置或事件,分外部中断源和 内部中断源。 中断响应:CPU暂时中断当前的工作,转去处理事件B。 中断返回:事件B处理结束之后,再回到原来事件A被中断的地方继续 处理事件A。 中断优先级:不同中断源发出的中断请求重要程度不同,每个中断源 对应一个优先级,称为中断优先级。作用:多个中断同时发生时,决 定那个中断被相应。 中断处理过程:中断请求、中断响应、中断服务和中断返回。
主 程 序
响应低级 中断请求
响应高级 中断请求 低级 中断
断点
序 低级
中断 返回 序 主程序
程 断点 程
高 级 中 断 服 务 程 序
主 程 序
RETI
返回低级 中断程序 RETI
430中断优先级:固定不变,取决 于模块在中断向量表中的排序。中 断向量越高优先级越高。
430的三类中断:
(1)系统复位中断 (2)非屏蔽中断 (3)可屏蔽中断☆
1 轮询方式与中断方式
轮询(Polling)方式:又称程序控制方式,是让CPU以一定的周期按次序查询每一个外 设,看它是否有数据处理的要求,若有则进行相应的服务;若无,或数据处理完毕, CPU接着查询下一个外设。 特点:CPU主动对外设进行查询,外设处于被动地位。 CPU执行效率低,等待时间长。 中断(Interrupt)方式:CPU暂时中止正在执行的程序,转去执行请求中断的那个外设 或事件的处理程序,处理完毕后再返回执行原来中止的程序。 特点:CPU通过响应中断请求为外设提供服务,外设处于主动地位,CPU在外设没有 产生中断时可以专心执行其他程序或休眠,执行效率高。
Watchdog Timer interrupt service routine #pragma vector=WDT_VECTOR __interrupt void WDT_ISR(void) { P1OUT ^= BIT4; // Toggle P1.4 }
Port 1 interrupt service routine #pragma vector=PORT1_VECTOR __interrupt void Port1_ISR(void) { P1OUT ^= BIT4; // Toggle P1.4 P1IFG &= ~BIT3; // P1.3 IFG cleared }
(3)中断返回
The interrupt handling routine terminates with the instruction: RETI. The return from the interrupt takes 5 cycles to execute the following actions: 1. The SR with all previous settings pops from the stack. All previous settings of GIE, CPUOFF, etc. are now in effect, regardless of the settings used during the ISR. 2. The PC pops from the stack and begins execution at the point where it was interrupted.
第3章 中断、时钟与低功耗
1、内容 ① 轮询与中断 ② 430中断系统 ③ UCS时钟系统 ④ UCS模块失效安全操作 ⑤ 低功耗工作模式 ⑥ 寄存器与控制位 ⑦ 例程 ⑧ 习题 2、要求 ① 掌握轮询与中断的概念 ② 掌握430中断系统的功能和特点 ③ 掌握系统复位中断、UNMI和可屏蔽中 断 ④ 掌握C430中ISR(Interrupt Service Routine)的编程方法 ⑤ 掌握单源中断和多源中断的处理方法 ⑥ 掌握时钟系统的特点与使用方法 ⑦ 掌握AM、LPM0、LPM3、LPM4的特 点与应用
address stored in the NMI.
以下中断源可产生UNMI: ① ② ③ An edge on the RST/NMI pin when configured in NMI mode An oscillator fault occurs An access violation to the flash memory
关闭总中断(可屏蔽中断)5种方式
② __bic_SR_register(GIE);
③ __disable_interrupt(); ④ _BIC_SR(GIE);
//见intrinsics.h
//见in430.h //见in430.h
⑤ _DINT();
//见in430.h
与MSP430汇编直接对应的 本征函数,非C语言标准库, 用于底层控制,见 includes->INTRINSICS.H 与in430.h